一种可穿戴无源膝关节外骨骼的制作方法
1.本实用新型属于人体运动辅助设备技术领域,具体涉及一种可穿戴无源膝关节外骨骼。
背景技术:
2.无源膝关节外骨骼以仿生学、人体工学为基础,模拟膝关节运动而研发的助力产品,主要用于以康复、助行、步态矫正为目的的客户或者以剧烈弹跳、奔跑、重体力劳动为目的的客户;无源膝关节外骨骼为纯机械结构,无需外部能量供应装置,仅利用人体自身能量就能对人体产生助力作用,其工作原理为:当肢体运动做负功时将能量收集与存储,当肢体运动做正功时释放能量对人体进行助力,可有效降低膝关节磨损,减轻负担,增加膝部力量,缓解因劳损等原因产生的疼痛;但目前的无源膝关节外骨骼直接采用弹性元件进行助力(即线性助力),由于弹性元件形变量有限,助力效果较差,无法满足助力需求。
技术实现要素:
3.鉴于以上现有技术的缺点,本实用新型的目的在于提供一种可穿戴无源膝关节外骨骼,通过第一凸轮曲面使线性弹簧以非线性的方式进行调节,不仅保证肢体伸展时有足够的能量对人体进行助力,提高助力效果;而且确保输出的助力力矩具有柔顺变刚度特性。
4.为实现上述目的及其他相关目的,本实用新型提供一种可穿戴无源膝关节外骨骼,包括大腿、小腿、关节轴、凸轮和储能机构,所述大腿和小腿通过关节轴可转动地连接在一起;所述凸轮固定连接在小腿上,并随小腿一起摆动;所述储能机构包括线性弹簧,所述线性弹簧的上端固定在大腿上,所述线性弹簧的下端与所述凸轮的凸轮外缘配合传动;所述线性弹簧具有可保持肢体直立稳定性的初始能量;当小腿带动凸轮相对大腿被动屈曲时,所述线性弹簧形变而储能;当小腿带动凸轮相对大腿伸直时,所述线性弹簧释能而助力;所述凸轮外缘包括使线性弹簧的储能量呈非线性增加的第一凸轮曲面;所述第一凸轮曲面为变半径曲面,且第一凸轮曲面的半径随屈曲角度的增加而增加,以确保肢体伸展时,线性弹簧有足够的能量对人体进行助力,提高助力效果;同时通过第一凸轮曲面使线性弹簧以非线性的方式进行调节,以确保输出的助力力矩具有柔顺变刚度特性。
5.优选地,所述线性弹簧为拉簧,所述拉簧的底端通过拉绳与凸轮外缘连接;当小腿带动凸轮相对大腿被动屈曲时,所述拉伸缠绕在凸轮上使线性弹簧受拉而储能。
6.优选地,所述线性弹簧为压簧,所述压簧的下端固定有与凸轮外缘传动配合的直线推杆;当小腿带动凸轮相对大腿被动屈曲时,凸轮推动直线推杆向上移动以使线性弹簧压缩储能。
7.优选地,所述直线推杆通过滚轮与凸轮外缘传动配合,以将滑动摩擦转变为滚动摩擦。
8.优选地,所述第一凸轮曲面为与0
°
~30
°
屈曲角度范围对应的凸轮曲面段,所述第一凸轮曲面按照线性弹簧储能量呈余弦加速度运动规律增加的方式进行设计;所述凸轮外
缘还包括与30
°
~70
°
屈曲角度范围对应的第二凸轮曲面,所述第二凸轮曲面按照线性弹簧储能量呈线性增加的方式进行设计,以保证输出的助力力矩跟随人体步行状态进行变化,提高能量分配与下肢行走协调性。
9.优选地,所述凸轮外缘还包括70
°
~120
°
屈曲角度范围对应的第三凸轮曲面,所述第三凸轮曲面按照线性弹簧储能量呈非线性增加的方式进行设计,且随着屈曲角度的增加,线性弹簧储能量的增加值不断减小。
10.优选地,所述凸轮外缘包括与0
°
~50
°
屈曲角度范围对应的第四凸轮曲面,且第四凸轮曲面对应的凸轮半径保持不变;所述第一凸轮曲面为与50
°
~125
°
屈曲角度范围对应的凸轮曲面段,以满足登高、跑跳和蹲起等剧烈运动的助力需求。
11.优选地,所述可穿戴无源膝关节外骨骼还包括用于调节线性弹簧初始能量的调节装置,以满足不同穿戴者的个体差异需求。
12.优选地,所述大腿和小腿上均设有绑带,以将外骨骼进行穿戴。
13.如上,本实用新型的一种可穿戴无源膝关节外骨骼,具有以下有益效果:
14.(1)通过第一凸轮曲面使线性弹簧以非线性的方式进行调节,不仅保证肢体伸展时有足够的能量对人体进行助力,提高助力效果;而且确保输出的助力力矩具有柔顺变刚度特性。
15.(2)针对不同运动状态的助力需求,设置凸轮形状以调整助力角度;
16.(3)通过调节装置调节线性弹簧的初始能量,以适应不同穿戴者的个体差异需求,提高适用性,优化助力效果;
17.(4)本实用新型采用被动式蓄能结构进行助力,结构简单,维护方便。
附图说明
18.图1为本实用新型实施例一提供的可穿戴无源膝关节外骨骼的主视图。
19.图2为图1的侧视图。
20.图3为图2中正常步行状态下凸轮形状的示意图。
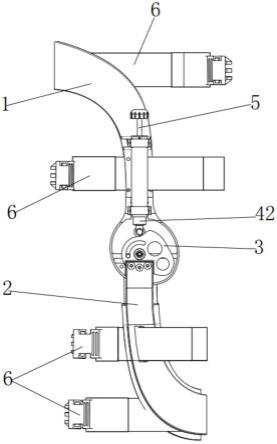
21.图4为本实用新型实施例二提供的可穿戴无源膝关节外骨骼的侧视图。
22.图5为图3中正常步行状态下凸轮形状的示意图。
23.图6为图3中剧烈运动状态下凸轮形状的示意图。
24.附图标记说明
25.大腿1,小腿2,凸轮3,第一凸轮曲面31,第二凸轮曲面32,第三凸轮曲面33,线性弹簧4,拉绳41,直线推杆42,调节装置5,绑带6。
具体实施方式
26.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效。
27.请参阅图1至图6。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型
所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
28.实施例一:
29.如图1至图3所示,实施例一提供一种可穿戴无源膝关节外骨骼,其包括大腿1、小腿2、关节轴、凸轮3和储能机构,大腿1和小腿2通过关节轴可转动地连接在一起;凸轮3固定连接在小腿2上,并随小腿2一起绕关节轴的轴中心线摆动;储能机构包括线性弹簧4,所述线性弹簧4为拉簧;线性弹簧4的上端固定在大腿1上,线性弹簧4的下端通过拉绳41固定在凸轮3的凸轮外缘上以便凸轮3跟随小腿2逆时针转动时,拉绳41缠绕在凸轮外缘上使线性弹簧4拉伸形变;线性弹簧4具有可保持肢体直立稳定性的初始能量;当小腿2带动凸轮3相对大腿1被动屈曲时(即逆时针转动),线性弹簧4受拉形变而储能;当小腿2带动凸轮3相对大腿1伸直时(即顺时针转动),线性弹簧4释能而助力;所述凸轮外缘包括使线性弹簧4的储能量呈非线性增加的第一凸轮曲面31;所述第一凸轮曲面31为变半径曲面,且第一凸轮曲面31的半径随屈曲角度的增加而增加,以使线性弹簧4以非线性的方式进行调节,确保输出的助力力矩具有柔顺变刚度特性的同时,提高助力效果。
30.可以理解的是,第一凸轮曲面31对应的屈曲角度范围由用户的运动工况确定,以更好地模拟对应运动工况下用户膝关节地力矩变化,提高助力效果。
31.可以理解的是,当用户正常行走时,膝关节的主要助力阶段对应的屈曲角度范围较小,大约在10
°
~20
°
范围内,而负重、跑跳、蹲起等剧烈运动对应的屈曲角度范围较大,大约在70
°
~120
°
范围内,由于凸轮拉线结构中的线性弹簧的形变量较大极易超出弹簧形变范围,因此,凸轮拉线结构不适用于大屈曲角度的负重、跑跳、蹲起等剧烈运动。因此,对于正常行走用户而言,凸轮3形状设置如下:
32.如图3所示,第一凸轮曲面31为与0
°
~30
°
屈曲角度范围对应的凸轮曲面段,凸轮外缘还包括与30
°
~70
°
屈曲角度范围对应的第二凸轮曲面32,且第二凸轮曲面32为固定半径曲面以使线性弹簧4的储能量呈线性增加(即线性弹簧4的形变量呈线性变化);在本实施例中,第一凸轮曲面31按照线性弹簧储能量呈余弦加速度运动规律增加的方式进行设计,以更好地模拟膝关节力矩变化,提高助力效果。
33.进一步地,如图3所示,凸轮外缘还包括与70
°
~120
°
屈曲角度范围对应的第三凸轮曲面33,所述第三凸轮曲面33按照线性弹簧储能量呈非线性增加的方式进行设计,且随着屈曲角度的增加,线性弹簧储能量的增加值不断减小,在便于用户穿戴外骨骼的同时,避免线性弹簧4后期因形变量过大而失效,提高线性弹簧4的寿命。
34.如图1和图2所示,可穿戴无源膝关节外骨骼还包括用于调节线性弹簧4初始能量的调节装置5,所述调节装置5通过调节线性弹簧4上端的高度位置实现线性弹簧4初始能量的调节。
35.如图2所示,大腿1上部和大腿1下部均设有与可捆绑在用户大腿上的绑带6,小腿2上部和小腿2下部均设有可捆绑在用户小腿上的绑带6。
36.可以理解的是,为了提高用户穿戴舒适性,绑带6上设有与用户接触的软包。
37.实施例二:
38.如图4和图5所示,实施例二提供一种可穿戴无源膝关节外骨骼,其包括大腿1、小腿2、关节轴、凸轮3和储能机构,大腿1和小腿2通过关节轴可转动地连接在一起;凸轮3固定连接在小腿2上,并随小腿2一起绕关节轴的轴中心线摆动;储能机构包括线性弹簧4,所述线性弹簧4为压簧;线性弹簧4的上端固定在大腿1上,线性弹簧4的下端通过直线推杆41与凸轮3的凸轮外缘配合传动;线性弹簧4具有可保持肢体直立稳定性的初始能量;当小腿2带动凸轮3相对大腿1被动屈曲时,凸轮3推动直线推杆41上移,使线性弹簧4受压形变而储能;当小腿2带动凸轮3相对大腿1伸直时,线性弹簧4释能而助力;所述凸轮外缘包括使线性弹簧4的储能量呈非线性增加的第一凸轮曲面31;所述第一凸轮曲面31为变半径曲面,且第一凸轮曲面31的半径随屈曲角度的增加而增加,以使线性弹簧4以非线性的方式进行调节,确保输出的助力力矩具有柔顺变刚度特性的同时,提高助力效果。
39.可以理解的是,第一凸轮曲面31对应的屈曲角度范围由用户的运动工况确定,以更好地模拟对应运动工况下用户膝关节地力矩变化,提高助力效果。
40.可以理解的是,正常行走的膝关节助力阶段对应的屈曲角度范围较小,大约在10
°
~20
°
范围内,而负重、跑跳、蹲起等剧烈运动对应的屈曲角度范围较大,大约在70
°
~120
°
范围内,因此,对于不同的助力屈曲角度范围应设置不同的凸轮形状。
41.对于正常行走用户而言,凸轮3形状设置如下:
42.如图5所示,第一凸轮曲面31为与0
°
~30
°
屈曲角度范围对应的凸轮曲面段,凸轮外缘还包括与30
°
~70
°
屈曲角度范围对应的第二凸轮曲面32,且第二凸轮曲面32的半径随屈曲角度的增加而线性增加以使线性弹簧4的储能量呈线性增加(即线性弹簧4的形变量呈线性变化);在本实施例中,第一凸轮曲面31按照线性弹簧储能量呈余弦加速度运动规律增加的方式进行设计,以更好地模拟膝关节力矩变化,提高助力效果。
43.进一步地,如图5所示,凸轮外缘还包括与70
°
~120
°
屈曲角度范围对应的第三凸轮曲面33,所述第三凸轮曲面33按照线性弹簧储能量呈非线性增加的方式进行设计,且随着屈曲角度的增加,线性弹簧储能量的增加值不断减小。
44.对于负重、跑跳、蹲起等剧烈运动用户而言,凸轮3的形状设置如下:
45.如图6所示,所述凸轮外缘包括与0
°
~50
°
屈曲角度范围对应的第四凸轮曲面34,且第四凸轮曲面34对应的凸轮半径保持不变;在此屈曲角度范围内,线性弹簧4不发生形变,仅起支撑作用;所述第一凸轮曲面31为与50
°
~125
°
屈曲角度范围对应的凸轮曲面段;在本实施例中,第一凸轮曲面31按照线性弹簧储能量呈余弦加速度运动规律增加的方式进行设计,以更好地模拟膝关节力矩变化。
46.如图2所示,可穿戴无源膝关节外骨骼还包括用于调节线性弹簧4初始能量的调节装置5,所述调节装置5通过调节线性弹簧4上端的高度位置实现线性弹簧4初始能量的调节。
47.如图2所示,大腿1上部和大腿1下部均设有与可捆绑在用户大腿上的绑带6,小腿2上部和小腿2下部均设有可捆绑在用户小腿上的绑带6。
48.可以理解的是,为了提高用户穿戴舒适性,绑带6上设有与用户接触的软包。
49.上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精
神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1