一种监测机器人保护装置的制作方法
1.本技术涉及保护装置的领域,尤其是涉及一种监测机器人保护装置。
背景技术:
2.在矿山的生产活动中,需要使用监测机器人对施工现场进行监测,以保障施工进行。
3.目前,主要采用保护罩对监测机器人进行保护,保护罩呈半球形,且采用玻璃钢制造而成。使用时,将保护罩罩设在监测机器人上,监测机器人透过保护罩对施工进行监测,保护罩对监测机器人进行遮挡保护。
4.由于矿山场景的环境气温较低,通过玻璃钢制成的保护罩难以对监测机器人提供保温防护,进而易于使监测机器人在低温环境中难以正常工作。
技术实现要素:
5.为了使保护罩能够对监测机器人提供保温防护,本技术提供一种监测机器人保护装置。
6.本技术提供的一种监测机器人保护装置,采用如下的技术方案:
7.一种监测机器人保护装置,用于对监测墩上设置的监测机器人进行防护,包括保护罩,保护罩位于监测墩上,保护罩内部中空,且一侧呈开口状,保护罩通过开口处罩设在监测机器人上,且与监测墩连接,保护罩从内到外依次包括碳纤维层、epo泡沫层、玻璃钢层,保护罩与监测墩之间设置有驱动组件,驱动组件用于驱动保护罩离开监测机器人。
8.通过采用上述技术方案,当监测机器人作业时,通过驱动组件使保护罩离开监测机器人,监测机器人对施工进行监测,当监测机器人停止工作时,通过驱动组件使保护罩罩设在监测机器人上,从而对监测机器人进行保护,保护罩包括碳纤维层、epo泡沫层、玻璃钢层,通过epo泡沫层能够对保护罩内的监测机器人进行保温,使得监测机器人易于得到保温保护,同时碳纤维层、epo泡沫层、玻璃钢层呈夹心结构,内层的碳纤维层能够增强保护罩的强度,使得保护罩在飞石的撞击下不易发生损坏,延长了保护罩的使用寿命,使得保护罩在矿山的恶劣场景中能够稳定使用。
9.可选的,所述驱动组件包括气缸、气泵和连接杆,连接杆中部弯曲呈90
°
,连接杆的一端与保护罩的玻璃钢层固定连接,另一端与监测墩铰接,气缸的固定端与监测墩铰接,且活动端与连接杆的弯曲处铰接,气泵与气缸连接。
10.通过采用上述技术方案,气泵驱动气缸的活动端收缩,气缸活动端收缩带动连接杆转动,连接杆带动保护罩朝向远离监测机器人的方向转动,从而使保护罩离开监测机器人;气泵驱动气缸的活动端伸长,气缸活动端伸长带动连接杆转动,连接杆带动保护罩朝向靠近监测机器人的方向转动,从而使保护罩罩设在监测机器人上,从而使得保护罩不仅能够对监测机器人进行保护,也能够使监测机器人对施工进行监测。
11.可选的,所述保护罩与监测墩之间设置有隔震组件,隔震组件包括减震橡胶块,减
震橡胶块与监测墩固定连接,监测机器人固定设置在减震橡胶块上,保护罩盖设在减震橡胶块上。
12.通过采用上述技术方案,当施工现场的震动传递到监测墩时,监测墩将震动传递到减震橡胶块上,减震橡胶块将震动缓减,使得监测机器人、保护罩均不易受到震动。
13.可选的,所述减震橡胶块靠近保护罩的一侧开设有环形的密封槽,密封槽的形状与保护罩开口处的形状相适配,保护罩卡接在密封槽内。
14.通过采用上述技术方案,将保护罩卡接在密封槽内,使得保护罩内的空间易于与外界隔绝,进一步增加了保护罩的保温性能。
15.可选的,所述减震橡胶块内开设有弹簧腔,弹簧腔内固定设置有若干个减震弹簧,减震弹簧沿从保护罩到监测墩的方向设置。
16.通过采用上述技术方案,通过在弹簧腔内设置弹簧,使得由监测墩传递到减震橡胶块的震动能够进一步进行缓解,降低了保护罩、监测机器人受到的震动。
17.可选的,所述弹簧腔内填充有乳胶海绵。
18.通过采用上述技术方案,由于乳胶海绵具有吸收震动的能力,通过在弹簧腔内填充乳胶海绵,能够进一步缓减保护罩、监测机器人受到的震动。
19.可选的,所述监测墩上还设置有控制组件,控制组件包括上位机和控制器,控制器固定设置在监测墩上,且与气泵连接,上位机与控制器连接,且用于远程控制控制器。
20.通过采用上述技术方案,通过上位机远程控制控制器以及控制器控制气泵,使得气缸活动端的收缩、伸出均能够进行远程控制,使得保护罩的盖合能够自动进行,降低了对人力的耗费。
21.可选的,所述控制器上罩设有防护网。
22.通过采用上述技术方案,由于监测机器人所处地区易于受到飞石的撞击,通过设置防护网能够使控制器不易受到飞石的撞击,进而易于保护控制器不受损伤。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.保护罩通过epo泡沫层对监测机器人进行保温防护,提高了防护罩的保温性能,且通过碳纤维层增强了保护罩的强度;
25.通过设置隔震组件,降低了保护罩、监测机器人受到的震动;
26.通过设置控制组件,使得保护罩的转动实现自动化,且能够远程控制保护罩的转动。
附图说明
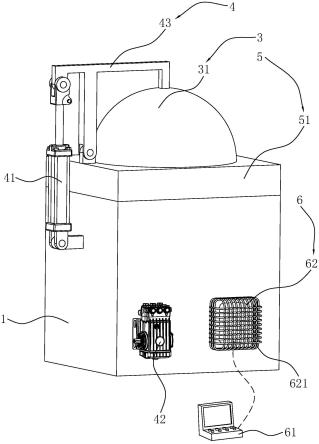
27.图1是本技术实施例的结构示意图;
28.图2是旨在说明隔震组件的剖面视图;
29.图3是图2中a处的放大视图。
30.附图标记说明:
31.1、监测墩;2、监测机器人;3、保护罩;31、玻璃钢层;32、epo泡沫层;33、碳纤维层;4、驱动组件;41、气缸;42、气泵;43、连接杆;5、隔震组件;51、减震橡胶块;511、密封槽;512、弹簧腔;52、减震弹簧;53、乳胶海绵;6、控制组件;61、上位机;62、控制器;621、防护网。
具体实施方式
32.以下结合附图1-3对本技术作进一步详细说明。
33.本技术实施例公开一种监测机器人保护装置。参照图1和图2,一种监测机器人保护装置,用于对监测墩1上设置的监测机器人2进行防护,包括保护罩3、驱动组件4、隔震组件5和控制组件6,保护罩3、驱动组件4、隔震组件5、控制组件6均设置在监测墩1上,保护罩3罩设在监测机器人2上,且用于对监测机器人2进行保温、防撞保护,驱动组件4用于驱动保护罩3离开或罩设在监测机器人2上,隔震组件5用于减缓保护罩3、监测机器人2受到的震动,控制组件6用于远程控制驱动组件4。
34.使用时,通过保护罩3对监测机器人2提供保温防护,同时也使得监测机器人2不易受到飞石的撞击,当监测机器人2进行作业时,通过控制组件6控制驱动组件4驱动保护罩3离开监测机器人2,使监测机器人2能够正常作业。
35.参照图2,隔震组件5包括减震橡胶块51、减震弹簧52和乳胶海绵53,减震橡胶块51呈矩形块状,且水平设置在监测墩1上,减震橡胶块51与监测墩1固定连接。
36.参照图2,减震橡胶块51内部开设有弹簧腔512,弹簧腔512呈矩形,弹簧腔512内沿长度方向和宽度方向均设置有若干个减震弹簧52,若干个减震弹簧52均竖直设置,减震弹簧52的顶端与弹簧腔512的顶面固定连接,且底面与弹簧腔512的底面固定连接。弹簧腔512内填充有乳胶海绵53。
37.参照图2和图3,保护罩3一面为平面,另一面为半球面,保护罩3内部中空,且平面侧呈开口状,保护罩3从内到外依次包括碳纤维层33、epo泡沫层32、玻璃钢层31。
38.参照图2和图3,减震橡胶块51的顶面开设有圆环形的密封槽511,监测机器人2固定设置在减震橡胶块51的顶面,且位于密封槽511的圆环内,保护罩3通过开口处罩设在监测机器人2上,且开口处卡接在密封槽511内,保护罩3的开口处与密封槽511相适配。
39.使用时,保护罩3罩设在减震橡胶块51上,监测机器人2位于保护罩3内,保护罩3通过epo泡沫层32对监测机器人2进行保温防护,且通过碳纤维层33、钢化玻璃层对监测机器人2进行防撞保护,进而提高了保护罩3的保温、防撞性能,同时通过减震橡胶块51以及减震橡胶块51内的减震弹簧52、乳胶海绵53降低了由监测墩1传递到监测机器人2、保护罩3的震动,使得监测机器人2、保护罩3不易受到震动。
40.参照图1,驱动组件4包括气缸41、气泵42和连接杆43,连接杆43呈长杆状,且中部呈90
°
弯曲,连接杆43的一端与保护罩3的玻璃钢层31固定连接,另一端与减震橡胶块51顶面的边缘铰接,连接杆43与保护罩3固定连接的部分水平设置,且与减震橡胶块51铰接的部分竖直设置,连接杆43的弯曲角度朝向保护罩3。
41.参照图1,气缸41位于连接杆43竖直设置部分远离保护罩3的一侧,气缸41的固定端与监测墩1铰接,且活动端与连接杆43的弯曲处铰接。气泵42固定设置在监测墩1上,且与气缸41连接。
42.使用时,当监测机器人2需要进行监测作业时,气泵42驱动气缸41的活动端收缩,气缸41的活动端带动连接杆43朝远离监测机器人2的方向转动,同时气缸41的固定端与监测墩1也进行转动,连接杆43带动保护罩3进行转动,从而使保护罩3离开监测机器人2,使得监测机器人2能够进行监测作业;当监测机器人2停止监测作业后,气泵42驱动气缸41的活动端伸出,气缸41的活动端带动连接杆43朝靠近监测机器人2的方向转动,同时保护罩3跟
随连接杆43进行转动,直到保护罩3的开口处卡接在密封槽511内,从而使得保护罩3能够对监测机器人2提供保温、防撞保护。
43.参照图1,控制组件6包括上位机61和控制器62,控制器62固定设置在监测墩1上,且与气泵42位于监测墩1的同一侧,控制器62与气泵42连接,控制器62上罩设有防护网621;上位机61与控制器62连接,且用于远程控制控制器62。
44.使用时,通过上位机61远程对控制器62进行控制,控制器62控制气泵42对气缸41的动作,进而使得保护罩3的转动实现了远程自动控制,进而保护罩3对监测机器人2的保护实现了自动化。
45.本技术实施例一种监测机器人保护装置的实施原理为:使用时,当监测机器人2需要进行监测作业时,通过上位机61远程控制控制器62,控制器62控制气泵42驱动气缸41的活动端收缩,气缸41的活动端带动连接杆43朝远离监测机器人2的方向转动,连接杆43带动保护罩3进行转动,从而使得保护罩3离开监测机器人2,使得监测机器人2能够进行监测作业。
46.当监测机器人2停止监测作业时,通过上位机61远程控制控制器62,控制器62控制气泵42驱动气缸41的活动端伸出,气缸41的活动端带动连接杆43朝靠近监测机器人2的方向转动,连接杆43带动保护罩3进行转动,直到保护罩3的开口处卡接在密封槽511内,从而使得保护罩3罩设在监测机器人2上,通过保护罩3对监测机器人2进行保温、防撞保护。
47.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1