一种基于雷达技术防碰撞的机器人的制作方法
1.本实用新型涉及智能机器人领域,尤其涉及一种基于雷达技术防碰撞的机器人。
背景技术:
2.机器人在移动过程中,经常会发生碰撞,导致机器的损坏,尤其是送餐的机器人,人员的走动随机性,导致机器人的移动更大几率会发生碰撞,此时将雷达架设于送餐机器人上,能有效减少机器人发生的碰撞情况。
3.机器人在移动过程中,虽然能对环境中的障碍在通过雷达技术扫描后,进行主动避让,但由于人员移动的随机性,仍会对来不及避让的机器人造成碰撞,并且对单一菜品进行送餐,会提高机器人来回的时间,影响顾客的行动,还会使得菜品发生洒落,降低上菜的效率,以及在餐厅工作的机器人,会沾有油污,油污无法及时去除,顾客对食品卫生安全产生顾虑,严重影响经济效益。
4.根据上述问题,需要研发一种基于雷达技术防碰撞的机器人,来克服上述问题。
技术实现要素:
5.为了克服人员移动的随机性,仍会对来不及避让的机器人造成碰撞,并且对单一菜品进行送餐,会提高机器人来回的时间,影响顾客的行动,还会使得菜品发生洒落,降低上菜的效率,以及在餐厅工作的机器人,会沾有油污,油污无法及时去除,顾客对食品卫生安全产生顾虑,严重影响经济效益的缺点,本实用新型提供一种基于雷达技术防碰撞的机器人。
6.本实用新型的技术方案是:一种基于雷达技术防碰撞的机器人,包括有主动轮、缓冲罩、雷达组件、行走系统和上菜系统;主动轮上连接有行走系统;行走系统外连接有缓冲罩;行走系统上安装有雷达组件;雷达组件上连接有上菜系统;还包括有充电单元、清洁单元和循环单元;上菜系统下部依次连接有充电单元、用于油污转移的清洁单元和用于去除油污的循环单元。
7.进一步的,行走系统还包括有缓冲单元、动力单元和调向单元;主动轮上连接有用于减少碰撞影响的缓冲单元;缓冲单元外连接有缓冲罩;缓冲单元上部连接有动力单元;动力单元下部连接有用于调整走向的调向单元。
8.进一步的,上菜系统还包括有传送单元、转移单元、限位单元和清障单元;雷达组件上连接有用于对菜品传送的传送单元;传送单元下部连接有用于对菜品运送至指定位置的转移单元;转移单元上依次连接有用于对菜品防护的限位单元和用于清理运送菜品过程中杂物的清障单元。
9.进一步的,缓冲单元包括有底盘、防护罩、第一弹性件、第二弹性件、第一横梁、门型架和从动轮;主动轮上部连接有底盘;底盘下部安装有两个从动轮;两个从动轮与主动轮呈三角形设置;底盘外表面固接有防护罩;防护罩内表面与动力单元连接;防护罩外表面环形阵列有若干个第一弹性件;每个第一弹性件在远离防护罩的一侧均与缓冲罩固接;防护
罩位于缓冲罩内部;防护罩内表面下部固接有第一横梁;第一横梁上表面中部与动力单元连接;第一横梁上固接有门型架;门型架上部与动力单元连接;门型架上表面固接有两个第二弹性件;两个第二弹性件上部均与缓冲罩固接。
10.进一步的,调向单元包括有第一齿轮、套管、第二齿轮、固定座、第一电动转轴和摩擦轮;动力单元下部连接有第一齿轮;第二横梁下表面转动连接有套管;套管外表面下部固接有第二齿轮;第二齿轮后部有第一齿轮啮合;第二齿轮下表面固接有固定座;固定座下部转动连接有第一电动转轴;第一电动转轴外表面固接有摩擦轮。
11.进一步的,传送单元包括有防尘罩、电动滑轨、电动滑块和承托件;雷达组件上表面连接有防尘罩;防尘罩内底面与转移单元连接;防尘罩下部与充电单元连接;防尘罩内底面与清洁单元连接;防尘罩内底面与循环单元连接;防尘罩内表面安装有两个电动滑轨;两个电动滑轨上滑动连接有若干个电动滑块;每个电动滑块上各固接有一个承托件。
12.进一步的,转移单元包括有第一支架、电动伸缩板、电动小车和充电头;防尘罩内底面固接有第一支架;第一支架上表面安装有电动伸缩板;电动伸缩板上部与清洁单元连接;电动伸缩板上部与电动小车活动连接;电动小车后部与充电单元连接;电动小车中部与限位单元连接;电动小车右部与清障单元连接;电动小车后部安装有充电头。
13.进一步的,限位单元包括有第三弹性件、摆板、吸附件和单向阀;电动小车中部固接有两个第三弹性件;两个第三弹性件相背侧各固接有一个摆板;两个摆板下部均与电动小车活动连接;两个摆板上部各固接有一个吸附件;两个吸附件左部各安装有一个单向阀。
14.进一步的,吸附件为中空的柔软橡胶材质,且上部开有若干个小孔。
15.进一步的,清障单元包括有第二支板、第二电动执行器、导板、第三支板、第四弹性件和刮涂件;电动小车右部固接有第二支板;第二支板下表面安装有两个第二电动执行器;两个第二电动执行器伸缩部下端各固接有一个导板;两个导板左部各固接有一个第三支板;两个第三支板左部各固接有两个第四弹性件;每相邻两个第四弹性件右部各固接有一个刮涂件;两个刮涂件相向侧各与一个导板滑动连接。
16.有益效果是:本实用新型通过上菜系统、行走系统和雷达组件,对菜品进行定点传送,还能通过调节摩擦轮与主动轮接触的位置,实现对移动方向的适应性调节。
17.本实用新型通过承托件、电动伸缩板和电动小车的配合,对菜品进行精准转移餐桌的特定位置上。
18.本实用新型通过两个清洁件和刮板,对电动小车的车轮上的油污进行清理,减少油污在该防撞机器人内的残留。
19.本实用新型通过两个吸附件对菜品承托盘进行安全防护,避免菜品在移动过程中移动甚至菜品洒落。
20.本实用新型还通过导板和刮涂件配合,对电动小车在移动过程中的障碍物进行拨开,并减少垃圾的粘附,实现电动小车顺利带动菜品转移。
附图说明
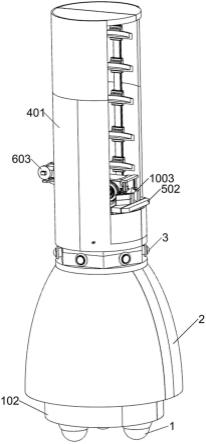
21.图1为本实用新型的基于雷达技术防碰撞的机器人的立体结构示意图;
22.图2为本实用新型的基于雷达技术防碰撞的机器人的剖视图;
23.图3为本实用新型的基于雷达技术防碰撞的机器人的缓冲单元立体结构示意图;
24.图4为本实用新型的基于雷达技术防碰撞的机器人的动力单元立体结构示意图;
25.图5为本实用新型的基于雷达技术防碰撞的机器人的调向单元立体结构示意图;
26.图6为本实用新型的基于雷达技术防碰撞的机器人的传送单元立体结构示意图;
27.图7为本实用新型的基于雷达技术防碰撞的机器人的组合立体结构示意图;
28.图8为本实用新型的基于雷达技术防碰撞的机器人的限位单元立体结构示意图;
29.图9为本实用新型的基于雷达技术防碰撞的机器人的a放大的结构示意图;
30.图10为本实用新型的基于雷达技术防碰撞的机器人的清障单元立体结构示意图。
31.附图标记中:1-主动轮,2-缓冲罩,3-雷达组件,101-底盘,102-防护罩,103-第一弹性件,104-第二弹性件,105-第一横梁,106-门型架,107-从动轮,201-驱动组件,202-圆盘,203-环形框,204-丝杆,205-定位杆,206-滑板,207-第一传动轮,208-第一传动杆,209-第二传动轮,2010-锥齿轮,2011-第二横梁,2012-第二传动杆,2013-锥齿盘,301-第一齿轮,302-套管,303-第二齿轮,304-固定座,305-第一电动转轴,306-摩擦轮,401-防尘罩,402-电动滑轨,403-电动滑块,404-承托件,501-第一支架,502-电动伸缩板,503-电动小车,504-充电头,601-充电座,602-第二支架,603-电动卷扬机,604-牵引件,701-第一支板,702-第二电动转轴,703-清洁件,704-第一电动执行器,801-滤箱,802-刮板,803-导管,901-第三弹性件,902-摆板,903-吸附件,904-单向阀,1001-第二支板,1002-第二电动执行器,1003-导板,1004-第三支板,1005-第四弹性件,1006-刮涂件。
具体实施方式
32.以下结合附图和具体实施例对本实用新型作具体的介绍。
33.实施例1
34.一种基于雷达技术防碰撞的机器人,根据图1-2所示,包括有主动轮1、缓冲罩2、雷达组件3、行走系统和上菜系统;主动轮1上连接有行走系统;行走系统外连接有缓冲罩2;行走系统上安装有雷达组件3;雷达组件3上连接有上菜系统;还包括有充电单元、清洁单元和循环单元;上菜系统下部依次连接有充电单元、清洁单元和循环单元;菜品放置于上菜系统上,主动轮1、雷达组件3和行走系统配合将菜品转移,缓冲罩2和行走系统配合对转移过程中的意外碰撞进行调整。
35.根据图1-5所示,行走系统还包括有缓冲单元、动力单元和调向单元;主动轮1上连接有缓冲单元;缓冲单元外连接有缓冲罩2;缓冲单元上部连接有动力单元;动力单元下部连接有调向单元。
36.根据图6和图8-10所示,上菜系统还包括有传送单元、转移单元、限位单元和清障单元;雷达组件3上连接有传送单元;传送单元下部连接有转移单元;转移单元上依次连接有限位单元和清障单元。
37.在使用基于雷达技术防碰撞的机器人前,以下简称该防碰撞机器人,首先操作人员将该防碰撞机器人转移到餐厅,而后对该智能机器人进行充电,待充电完成后,启动该防碰撞机器人,通过程序设定该防撞机器人的行走路线,接着,后厨将装有菜品的餐盘放在上菜系统上,接着通过行走系统,将菜品转移至餐厅的指定位置上,在行走过程中,通过雷达组件3进行行走路线上的障碍检测,提前规避障碍,而后通过缓冲罩2对突发情况下人对该防撞机器人产生的碰撞,进行能量吸收,避免该防撞机器人倾倒,以及减少碰撞对人造成的
损伤。
38.根据图2和图3所示,缓冲单元包括有底盘101、防护罩102、第一弹性件103、第二弹性件104、第一横梁105、门型架106和从动轮107;主动轮1上部连接有底盘101;底盘101下部安装有两个从动轮107;两个从动轮107与主动轮1呈三角形设置;底盘101外表面焊接有防护罩102;防护罩102内表面与动力单元连接;防护罩102外表面环形阵列有若干个第一弹性件103;每个第一弹性件103在远离防护罩102的一侧均与缓冲罩2固接;防护罩102位于缓冲罩2内部;防护罩102内表面下部焊接有第一横梁105;第一横梁105上表面中部与动力单元连接;第一横梁105上焊接有门型架106;门型架106上部与动力单元连接;门型架106上表面固接有两个第二弹性件104;两个第二弹性件104上部均与缓冲罩2固接。
39.第二弹性件104为弹簧。
40.根据图2和图4所示,动力单元包括有驱动组件201、圆盘202、环形框203、丝杆204、定位杆205、滑板206、第一传动轮207、第一传动杆208、第二传动轮209、锥齿轮2010、第二横梁2011、第二传动杆2012和锥齿盘2013;门型架106上表面中部安装有驱动组件201;驱动组件201输出轴下部固接有圆盘202;防护罩102内表面上部转动连接有丝杆204;防护罩102内表面上部焊接有定位杆205;定位杆205位于丝杆204的上方;丝杆204外表面旋接有滑板206;滑板206中部与定位杆205滑动连接;滑板206上部焊接有环形框203;圆盘202下表面通过销钉与环形框203接触传动;丝杆204外表面固接有第一传动轮207;防护罩102内表面下部转动连接有第一传动杆208;第一传动杆208外表面固接有第二传动轮209;第二传动轮209外表面通过皮带与第一传动轮207传动连接;第一传动杆208外表面固接有锥齿轮2010;锥齿轮2010位于第二传动轮209的前方;第一传动杆208外表面与第一横梁105转动连接;防护罩102内表面焊接有第二横梁2011;第二横梁2011下表面与调向单元连接;第二横梁2011位于第一传动杆208的下方;第二横梁2011中部转动连接有第二传动杆2012;第二传动杆2012下表面与调向单元连接;第二传动杆2012上部固接有锥齿盘2013;锥齿盘2013位于第二横梁2011的上方;锥齿盘2013上部与锥齿轮2010啮合。
41.驱动组件201为伺服电机。
42.根据图2和图5所示,调向单元包括有第一齿轮301、套管302、第二齿轮303、固定座304、第一电动转轴305和摩擦轮306;第二传动杆2012外表面下部固接有第一齿轮301;第二横梁2011下表面转动连接有套管302;套管302外表面下部固接有第二齿轮303;第二齿轮303后部有第一齿轮301啮合;第二齿轮303下表面固接有固定座304;固定座304下部转动连接有第一电动转轴305;第一电动转轴305外表面固接有摩擦轮306。
43.防撞行走过程:首先当上菜系统中放好菜品后,此时启动第一电动转轴305,第一电动转轴305带动摩擦轮306传动主动轮1转动,主动轮1和两个从动轮107的配合,带动底盘101传动防护罩102移动,防护罩102通过若干个第一弹性件103和两个第二弹性件104带动缓冲罩2移动,缓冲罩2带动雷达组件3传动上菜系统移动,对菜品进行转移,而菜品要送达的位置不在同一直线时,需要对该防撞机器人的移动方向进行调整,此时,启动驱动组件201,驱动组件201输出轴带动圆盘202转动,圆盘202通过销钉带动环形框203传动滑板206移动,滑板206同时在丝杆204和定位杆205上移动,丝杆204产生转动,丝杆204带动第一传动轮207通过皮带传动第二传动轮209转动,第二传动轮209带动第一传动杆208传动锥齿轮2010转动,锥齿轮2010带动锥齿盘2013传动第二传动杆2012转动,第二传动杆2012带动第
一齿轮301传动第二齿轮303传动固定座304转动,固定座304带动第一电动转轴305转动,第一电动转轴305带动摩擦轮306围绕主动轮1作圆周运动,通过控制摩擦轮306与主动轮1的接触位置,实现该防撞机器人朝着远离接触位置的一侧移动,待方向调整好后,关闭驱动组件201。
44.根据图2和图6所示,传送单元包括有防尘罩401、电动滑轨402、电动滑块403和承托件404;雷达组件3上表面连接有防尘罩401;防尘罩401内底面与转移单元连接;防尘罩401下部与充电单元连接;防尘罩401内底面与清洁单元连接;防尘罩401内底面与循环单元连接;防尘罩401内表面安装有两个电动滑轨402;两个电动滑轨402上滑动连接有若干个电动滑块403;每个电动滑块403上各固接有一个承托件404。
45.防尘罩401前部开有通槽。
46.承托件404为开有凹槽的弧板。
47.根据图2和图6所示,转移单元包括有第一支架501、电动伸缩板502、电动小车503和充电头504;防尘罩401内底面螺栓连接有第一支架501;第一支架501上表面安装有电动伸缩板502;电动伸缩板502上部与清洁单元连接;电动伸缩板502上部与电动小车503活动连接;电动小车503后部与充电单元连接;电动小车503中部与限位单元连接;电动小车503右部与清障单元连接;电动小车503后部安装有充电头504。
48.根据图2和图6所示,充电单元包括有充电座601、第二支架602、电动卷扬机603和牵引件604;防尘罩401内表面下部安装有充电座601;充电座601用于与充电头504配合;防尘罩401外表面下部螺栓连接有第二支架602;第二支架602上安装有两个电动卷扬机603;两个电动卷扬机603内均设有牵引件604;两个牵引件604前部均与电动小车503连接。
49.上菜阶段:当后厨操作人员将菜品依次放置于每两个承托件404上后,该防撞机器人通过行走系统将菜品转移至餐厅的指定位置后,该防撞机器人停止移动,接着最下方两个承托件404通过电动滑块403各在一个电动滑轨402往下移动,直到菜品的承装盘接触到电动小车503后,两个承托件404继续往下运动,菜品被留在电动小车503上,接着电动伸缩板502伸长并从防尘罩401的开口处伸出,待电动伸缩板502伸缩端靠在餐桌上后,启动电动小车503,电动小车503带动菜品进行移动,电动小车503通过电动伸缩板502到达餐桌上,电动小车503移动到指定座位上后,电动小车503停止移动,顾客将菜品从电动小车503上取下,其中电动小车503在将菜品转移出来时,两个电动卷扬机603均将牵引件604放出,牵引件604随着电动小车503牵出,避免电动小车503的遗失,而后待菜品被取下后,启动电动小车503,电动小车503重新回到防尘罩401内,同时两个电动卷扬机603将各自的牵引件604进行收卷,待电动小车503到达防尘罩401内后,配合牵引件604对电动小车503进行正位,使得电动小车503上的充电头504与充电座601配对,对电动小车503进行充能,直到需要将菜品进行转移时停止充能。
50.根据图2和图7所示,清洁单元包括有第一支板701、第二电动转轴702、清洁件703和第一电动执行器704;防尘罩401内底面焊接有两个第一支板701;两个第一支板701上部转动连接有第二电动转轴702;第二电动转轴702外表面下部传动连接有两个清洁件703;两个清洁件703下部与循环单元连接;两个清洁件703上部绕过电动伸缩板502;电动小车503下部安装有第一电动执行器704。
51.清洁件703为具有吸油效果的环形清洗布带。
52.第一电动执行器704为电动气缸。
53.根据图2和图7所示,循环单元包括有滤箱801、刮板802和导管803;防尘罩401内底面固接有两个滤箱801;两个滤箱801位于两个第一支板701之间;两个滤箱801内各焊接有两个刮板802;每两个刮板802上部各与一个清洁件703接触;两个滤箱801前部和后部各焊接有一个导管803;两个导管803分别与两个滤箱801连通。
54.油污清理阶段:当电动小车503行走与餐桌上,电动小车503的车轮上就会沾有油污,行走过程中打滑,会严重影响电动小车503对菜品的转移,当电动小车503回到防尘罩401内后,此时电动小车503的车轮压在两个清洁件703上,此时启动第一电动执行器704,第一电动执行器704伸长,第一电动执行器704伸缩部抵住防尘罩401底部后,第一电动执行器704将电动小车503向上顶起,使得电动小车503的车轮能在两个清洁件703上转动,关闭第一电动执行器704,接着启动电动小车503,使得电动小车503的车轮空转,电动小车503的车轮上的也油污被转移到两个清洁件703上,实现对电动小车503的清洗,避免油污的残留影响移动,接着启动第一电动执行器704,第一电动执行器704收缩,使得电动小车503车轮与防尘罩401底部接触,以便于下次对菜品的转移,待电动小车503出去运菜品时,其中两个清洁件703上油污需要及时清理,此时启动第二电动转轴702,第二电动转轴702带动两个清洁件703转动,在两个清洁件703转动过程中,两个清洁件703各与一个刮板802接触,两个清洁件703上的油污被两个刮板802刮下,油污被转移到两个带有清洁液的滤箱801内,油污溶解到清洁液中,避免油污在滤箱801内残留,而后通过一个导管803导入清洁液,在该防碰撞机器人使用一段时间后,另一个导管803将带有油污的废液导出。
55.根据图2和图8-9所示,限位单元包括有第三弹性件901、摆板902、吸附件903和单向阀904;电动小车503中部固接有两个第三弹性件901;两个第三弹性件901相背侧各固接有一个摆板902;两个摆板902下部均与电动小车503铰接;两个摆板902上部各固接有一个吸附件903;两个吸附件903左部各安装有一个单向阀904。
56.第三弹性件901为弹簧。
57.吸附件903为中空的柔软橡胶材质,且上部开有若干个小孔。
58.根据图2和图10所示,清障单元包括有第二支板1001、第二电动执行器1002、导板1003、第三支板1004、第四弹性件1005和刮涂件1006;电动小车503右部焊接有第二支板1001;第二支板1001下表面安装有两个第二电动执行器1002;两个第二电动执行器1002伸缩部下端各固接有一个导板1003;两个导板1003左部各焊接有一个第三支板1004;两个第三支板1004左部各固接有两个第四弹性件1005;每相邻两个第四弹性件1005右部各固接有一个刮涂件1006;两个刮涂件1006相向侧各与一个导板1003滑动连接。
59.第二电动执行器1002为电动推杆。
60.两个导板1003呈八字形设置。
61.安全防护阶段:当两个承托件404通过电动滑块403各在一个电动滑轨402往下移动时,两个承托件404带着菜品往下运动,当菜品下表面接触到两个摆板902,两个摆板902向两边撇开,两个第三弹性件901被拉伸,同时,两个吸附件903均与菜品承托盘下表面接触,菜品承托盘使得两个吸附件903变形,将吸附件903的空腔内的空气通过单向阀904向外挤出,而后两个吸附件903通过回弹效果,使得吸附件903紧紧贴敷于菜品承托盘的下表面,并通过两个吸附件903上小孔,将菜品承托盘吸住,有效避免菜品在移动过程中的移动,导
致菜品洒落,同时,电动小车503在餐桌上移动时,餐桌上会有无意摆放的餐具,影响电动小车503对菜品的转移,此时,电动小车503通过电动伸缩板502转移到餐桌上后,启动两个第二电动执行器1002,两个第二电动执行器1002伸长各带动一个导板1003往下运动,两个导板1003各带动第三支板1004和两个第四弹性件1005向下移动,每相邻两个第四弹性件1005带动一个刮涂件1006往下运动,待两个刮涂件1006接触到餐桌表面后,关闭两个第二电动执行器1002,电动小车503在移动过程中,通过八字形设置的两个导板1003,将杂乱的餐具以及餐后垃圾往旁边推开,此时两个刮涂件1006被杂乱餐具和餐后垃圾带动向左运动,此时相应一侧的两个第四弹性件1005被压缩,待电动小车503送餐完毕后,电动小车503往回撤,此时,被压缩的第四弹性件1005恢复,并带动刮涂件1006运动,刮涂件1006通过弧面结构,将导板1003上的餐后垃圾铲除,避免油污停留在导板1003上,接着启动第二电动执行器1002,两个第二电动执行器1002收缩,同步带动两个导板1003往上移动,使得两个导板1003离开餐桌表面。
62.上述实施例,只是本实用新型的较佳实施例,并非用来限制本实用新型实施范围,故凡以本实用新型权利要求所述内容所做的等效变化,均应包括在本实用新型权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1