一种高空灭火机器人的制作方法
[0001]
本发明涉及高空灭火机器人领域,具体涉及一种高空灭火机器人。
背景技术:
[0002]
随着社会经济的迅猛发展,建筑和企业生产的特殊性,导致化学危险品和放射性物质泄漏以及燃烧、爆炸、坍塌的事故隐患增加,事故发生的概率也相应提高。一旦发生灾害事故,消防员面对高温、黑暗、有毒和浓烟等危害环境时,若没有相应的设备贸然冲进现场,不仅不能完成任务,还会徒增人员伤亡。
[0003]
消防机器人作为特种机器人的一种,在灭火和抢险救援中愈加发挥举足轻重的作用。各种大型石油化工企业、隧道、地铁等不断增多,油品燃气、毒气泄漏爆炸、隧道、地铁坍塌等灾害隐患不断增加。
[0004]
此类灾害具有突发性强、处置过程复杂、危害巨大、防治困难等特点,已成顽疾。消防机器人能代替消防救援人员进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场进行数据采集、处理、反馈,有效地解决消防人员在上述场所面临的人身安全、数据信息采集不足等问题。现场指挥人员可以根据其反馈结果,及时对灾情作出科学判断,并对灾害事故现场工作作出正确、合理的决策。
[0005]
通常消防机器人是以地面为载体,水炮的位置变化被限制在结构件的举升架上,无法对高度较高的地方进行灭火救援,所以无法在楼房救援中采取有效的灭火措施。
技术实现要素:
[0006]
本发明的目的是针对现有技术存在的不足,提供一种高空灭火机器人。
[0007]
为实现上述目的,本发明提供了一种高空灭火机器人,包括底盘、动力及控制机构和工作装置,底盘的两侧设有行走机构,其上通过回转机构连接有回转平台,回转平台上侧中部设有机械臂,行走机构、机械臂和回转机构分别与动力及控制机构连接,机械臂的外端连接有消防云台,消防云台连接有消防头,消防头上设有水雾喷头,工作装置包括水箱和连接在水箱与水雾喷头之间的水装置总成,水装置总成与动力及控制机构连接,动力及控制机构连接有遥控终端。
[0008]
进一步的,工作装置还包括干粉装置,消防云台上还设有干粉喷头,干粉喷头与干粉装置连接。
[0009]
进一步的,机械臂包括一端铰接在回转平台上的大臂,大臂的另一端铰接有第一固定座,第一固定座与回转平台之间铰接有第一拉杆,第一固定座与二臂的一端铰接,二臂与回转平台之间铰接有第一油缸,且其另一端铰接有第二固定座,第二固定座与第一固定座之间铰接有第二拉杆,第二固定座与三臂的一端连接,三臂与第二固定座之间铰接有第二油缸,且其另一端与消防云台连接,第一油缸和第二油缸分别与动力及控制机构连接。
[0010]
进一步的,三臂为伸缩臂,且其与动力及控制机构连接。
[0011]
进一步的,动力及控制机构包括蓄电池以及与蓄电池连接的液压动力机构和电气
控制机构,液压动力机构与电气控制机构连接;行走机构、机械臂和回转机构分别与液压动力机构连接,水装置总成与电气控制机构连接。
[0012]
进一步的,消防云台包括与三臂铰接的第三固定座,第三固定座与三臂之间铰接有第三油缸,第三固定座固定有云台马达,云台马达与消防头连接,第三油缸和云台马达分别与动力及控制机构连接。
[0013]
进一步的,底盘前端设有消防水炮,消防水炮通过管路连接有消防水带快速接头。
[0014]
进一步的,消防头上还设有火焰检测传感器,火焰检测传感器与动力及控制机构连接,动力及控制机构根据火焰检测传感器检测的信号控制机械臂和消防云台工作。
[0015]
进一步的,回转平台上侧设有防护罩,动力及控制机构和工作装置均设置在防护罩内。
[0016]
有益效果:本发明的机械臂可折叠设置在回转平台上,使得该设备具有较小的运输尺寸,本发明可以通过遥控使用,到达目的地后,可控制机械臂伸展至合适的高度进行灭火,提高了工作范围,能更好地保护救火人员安全。
附图说明
[0017]
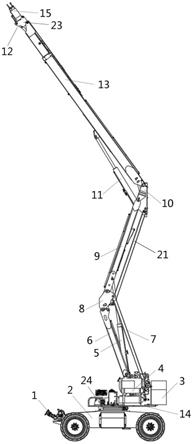
图1是本发明实施例的高空灭火机器人伸展状态的结构示意图;
[0018]
图2是本发明实施例的高空灭火机器人折叠状态的结构示意图;
[0019]
图3是本发明实施例的高空灭火机器人折叠状态内部结构示意图
[0020]
图4是本发明实施例的消防云台和消防头的放大结构示意图。
具体实施方式
[0021]
下面结合附图和具体实施例,进一步阐明本发明,本实施例在以本发明技术方案为前提下进行实施,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
[0022]
如图1至4所示,本发明实施例提供了一种高空灭火机器人,包括底盘2、动力及控制机构和工作装置,底盘2的两侧设有行走机构22,行走机构22包括行走驱动部件和与行走驱动部件连接的轮体,轮体优选为4个,前侧的轮体为导向轮,可调整方向,使得机器人能够完成转弯动作,底盘2上通过回转机构24连接有回转平台14,回转平台14可相对底盘做360
°
旋转。回转平台14上侧中部设有机械臂,机械臂与回转平台14优选使用销轴连接,销轴外部为铜套,内部为轴套,铜套与轴套之间使用润滑油润滑,减少摩擦也减少磨损。
[0023]
行走机构22、机械臂和回转机构分别与动力及控制机构连接,机械臂的外端连接有消防云台12,消防云台12连接有消防头15,消防头15上设有水雾喷头20,工作装置包括水箱3和连接在水箱3与水雾喷头20之间的水装置总成25,水装置总成25与动力及控制机构连接,动力及控制机构连接有遥控终端,动力及控制机构向水装置总成25提供电源,使得水装置总成从水箱吸取消防水,然后高压输出。在回转平台14上侧设有防护罩27,动力及控制机构和工作装置均设置在防护罩27内,实现防水、防灰和防砸。
[0024]
工作装置还包括干粉装置4,消防云台12上还设有干粉喷头16,干粉喷头16与干粉装置4连接,干粉喷头16优选通过软管与干粉装置4相连,水雾喷头20优选通过软管与水箱3相连,软管外层优选包有缠绕管,缠绕管耐磨耐高温,可以有效地保护软管,软管沿着机械臂固定,机械臂上间隔设有用于固定软管的管夹。
[0025]
机械臂包括一端铰接在回转平台14上的大臂6,大臂6的另一端铰接有第一固定座8,第一固定座8与回转平台14之间铰接有第一拉杆7,第一固定座8与二臂9的一端铰接,二臂9与回转平台14之间铰接有第一油缸5,且其另一端铰接有第二固定座10,第二固定座10与第一固定座8之间铰接有第二拉杆21,第二固定座10与三臂13的一端连接,三臂13与第二固定座10之间铰接有第二油缸11,且其另一端与消防云台12连接,第一油缸5和第二油缸11分别与动力及控制机构连接,三臂13优选采用伸缩臂,且其与动力及控制机构连接。机械臂可折叠的两个臂组为双组平行四边形机构,两组臂之间通过拉杆传动。
[0026]
动力及控制机构包括蓄电池以及与蓄电池连接的液压动力机构和电气控制机构,液压动力机构与电气控制机构连接。蓄电池设置在安装于行走机构两侧的电池箱26内,底盘2底部优选设有无线充电装置,通过无线充电装置向蓄电池充电,使得充电更加简便,能够随时出发救火。行走机构22、机械臂和回转机构分别与液压动力机构连接,水装置总成25与电气控制机构连接。
[0027]
消防云台12包括与三臂13铰接的第三固定座23,第三固定座23与三臂13之间铰接有第三油缸18,第三固定座23固定有云台马达19,云台马达19与消防头15连接,第三油缸18和云台马达19分别与动力及控制机构连接,消防云台12可通过第三油缸18和第三固定座23的运动来实现俯仰动作调整,并通过云台马达19实现调整横向角度调整,以此调整灭火角度。
[0028]
在底盘2前端设有消防水炮1,底盘2的两侧有两根硬质的管路从水箱3位置延伸至消防水炮1进水口,管路一端通过活动法兰与消防水炮1进行螺栓连接,另一端螺纹连接有消防水带的快速接头,使用时可快速连接消防水带,由消防车向消防炮1提供高压消防水。
[0029]
消防头15上还设有火焰检测传感器17,火焰检测传感器17与动力及控制机构连接,动力及控制机构根据火焰检测传感器17检测的信号控制机械臂和消防云台12工作,火焰检测传感器17能够检测到火焰位置,使得救灾更精准。消防云台12上优选设有摄像机,可以供工作人员远程观察或是查验灭火记录。
[0030]
可通过遥控终端遥控本机器人行使到目的地,当火灾为是高空火焰时,控制机械臂及消防云台12工作,控制机械臂伸展到火焰高度后通过水雾喷头20进行灭火,由于救火人员可以遥控救火,减少了直接面对火焰的机会,降低了救火人员的危险。如为近地火灾,则采用消防水炮1进行灭火。
[0031]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,其它未具体描述的部分,属于现有技术或公知常识。在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1