一种多AUV半离线战术推演系统的制作方法
一种多auv半离线战术推演系统
技术领域
1.本发明涉及水下无人潜航器技术领域,具体涉及一种多auv半离线战术推演系统。
背景技术:
2.在海洋工程领域,auv(自主式水下无人潜航器)的使用方式是以任务制定-任务规划-下发任务-auv任务执行-auv回收作为使用流程。随着auv技术发展,auv单一使用已经不能满足多种多样的任务形式,多auv的协同使用将作为重要研究方向。由于auv是属于深海作业的装备,执行任务期间,离海岸线较远或者在水下工作较长,使得auv在航行时会产生一定的航行误差。当多auv同时执行任务时,使用人员无法直观的观察各个auv的状态。当多auv同时使用时,不可能对每条auv全程跟踪,管理成本增大,那么就需要对多条auv协同使用时,需要研制一种多auv半离线战术推演系统,既可以呈现多条auv的实时状态,又可以进行多条auv的航路推演。当处于水下时,则进行战术推演;当处于水面,能收到北斗终端周期性发送的auv的状态信息时,则进行实时跟踪。
技术实现要素:
3.有鉴于此,本发明提供了一种多auv半离线战术推演系统,该战术推演系统通过北斗终端可以与多个auv进行通信,在未收到auv状态信息时可以进行离线推演,在接收到多个auv状态信息时可利用北斗短信发送的信息进行位置矫正,提高了执行任务期间的实时性。
4.本发明采用以下具体技术方案:
5.一种多auv半离线战术推演系统,该战术推演系统包括主控柜和北斗终端;
6.所述主控柜包括柜体、战术推演计算机、输入装置、显示装置、电源、散热风扇以及伸缩支撑架;所述战术推演计算机、所述输入装置、所述显示装置以及所述电源均安装于所述柜体内;所述散热风扇固定安装于所述柜体,用于对所述战术推演计算机进行散热;所述电源与所述显示装置、所述战术推演计算机、所述散热风扇以及所述北斗终端之间通过连接电缆电连接;所述输入装置和所述显示装置均与所述战术推演计算机连接;所述伸缩支撑架安装于所述柜体;
7.所述北斗终端安装于所述伸缩支撑架的顶部,并与所述战术推演计算机之间通过通信电缆连接,用于实现北斗短信收发和示位功能;
8.所述推演战术计算机设置有推演系统,所述推演系统包括人机交互界面模块、推演模块、北斗状态接收模块以及海洋电子地图;
9.所述人机交互界面模块用于输入预先规划的任务文件信息、以及接收所述输入装置输入的信息,并通过所述显示装置输出图像信息;
10.所述海洋电子地图用于提供海洋地图数据;
11.所述北斗状态接收模块用于接收所述北斗终端输入的北斗短信,并将接收到的信息发送到所述人机交互界面模块和所述推演模块;
12.当接收到多个auv的北斗短信时,根据接收的北斗短信,所述推演模块更新各个auv的位置信息、电量信息以及状态信息,并在所述海洋电子地图上进行更新显示;
13.当未收到auv的北斗短信时,根据预先规划的航路文件信息,所述推演模块更新各个auv的位置信息、电量信息以及状态信息,并在所述海洋电子地图上进行更新显示。
14.更进一步地,所述任务文件信息包括航速、航行深度以及航行路径。
15.更进一步地,所述任务文件信息还包括校准点和校准时间;
16.当推演的auv位置到达校准点时,所述推演模块进入校准过程,并等待校准时间;若在校准过程中,所述推演模块接收到校准北斗短信,则对auv位置进行矫正;若在校准过程中,所述推演模块未收到校准北斗短信,则在校准时间到达后,继续进行推演。
17.更进一步地,所述伸缩支撑架竖直设置在所述柜体的内边缘,包括外筒、插销、圆盘底座、以及滑动套设于所述外筒内的内筒;
18.所述外筒的底端固定安装于所述柜体的内底部;
19.所述圆盘底座固定安装于所述内筒的顶部,用于支承所述北斗终端;
20.所述外筒和所述内筒均设置有多个通孔;
21.所述插销穿设于所述通孔中,将所述内筒支承于预定高度;
22.所述外筒的内底部设置有用于对所述内筒进行限位的限位环。
23.更进一步地,所述外筒的直径为15cm~30cm、且高度为100cm~120cm;
24.所述内筒的高度为90cm~100cm;
25.所述圆盘底座与所述内筒焊接连接成一体结构;
26.所述插销采用合金钢材料制成且长度大于所述外筒的直径。
27.更进一步地,所述输入装置为键盘和鼠标。
28.更进一步地,所述显示装置为显示屏,并在所述显示装置与所述柜体之间设置有减振结构。
29.更进一步地,所述北斗终端包括控制电路、北斗用户卡以及北斗天线。
30.有益效果:
31.本发明的战术推演系统设置有北斗终端,并在推演战术计算机设置有推演系统,战术推演系统包括人机交互界面模块、推演模块、北斗状态接收模块以及海洋电子地图;通过北斗终端可以与多个auv进行通信,在未收到auv状态信息时可以进行离线推演,在接收到多个auv状态信息时可利用北斗短信发送的信息进行位置矫正,提高了执行任务期间的实时性。
附图说明
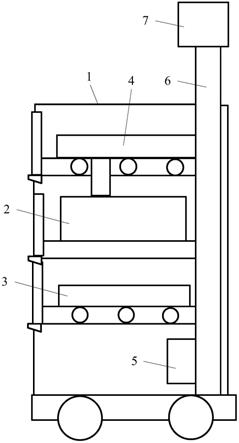
32.图1为本发明战术推演系统的主控柜的结构示意图;
33.图2为图1中伸缩支撑架的结构示意图;
34.图3为本发明推演系统的流程图。
35.其中,1-柜体,2-战术推演计算机,3-输入装置,4-显示装置,5-电源,6-伸缩支撑架,7-北斗终端,8-外筒,9-内筒,10-插销,11-圆盘底座
具体实施方式
36.下面结合附图并举实施例,对本发明进行详细描述。
37.本发明提供了一种多auv半离线战术推演系统,如图1和图2所示,该战术推演系统包括主控柜和北斗终端7;
38.主控柜包括柜体1、战术推演计算机2、输入装置3、显示装置4、电源5、散热风扇以及伸缩支撑架6;战术推演计算机2、输入装置3、显示装置4以及电源5均安装于柜体1内;散热风扇固定安装于柜体1,用于对战术推演计算机2进行散热;电源5与显示装置4、战术推演计算机2、散热风扇以及北斗终端7之间通过连接电缆电连接;输入装置3和显示装置4均与战术推演计算机2连接;伸缩支撑架6安装于柜体1;输入装置3为键盘和鼠标;显示装置4为显示屏,并在显示装置4与柜体1之间设置有减振结构;
39.北斗终端7安装于伸缩支撑架6的顶部,并与战术推演计算机2之间通过通信电缆连接,用于实现北斗短信收发和示位功能;
40.推演战术计算机设置有推演系统,推演系统包括人机交互界面模块、推演模块、北斗状态接收模块以及海洋电子地图;
41.人机交互界面模块用于输入预先规划的任务文件信息、以及接收输入装置3输入的信息,并通过显示装置4输出图像信息;
42.海洋电子地图用于提供海洋地图数据;
43.北斗状态接收模块用于接收北斗终端7输入的北斗短信,并将接收到的信息发送到人机交互界面模块和推演模块;
44.当接收到多个auv的北斗短信时,根据接收的北斗短信,推演模块更新各个auv的位置信息、电量信息以及状态信息,并在海洋电子地图上进行更新显示;
45.当未收到auv的北斗短信时,根据预先规划的航路文件信息,推演模块更新各个auv的位置信息、电量信息以及状态信息,并在海洋电子地图上进行更新显示。
46.上述战术推演系统设置有北斗终端7,并在推演战术计算机设置有推演系统,战术推演系统包括人机交互界面模块、推演模块、北斗状态接收模块以及海洋电子地图;通过北斗终端7可以与多个auv进行通信,在未收到auv状态信息时可以进行离线推演,在接收到多个auv状态信息时可利用北斗短信发送的信息进行位置矫正,提高了执行任务期间的实时性。
47.一种具体的实施方式中,任务文件信息包括航速、航行深度以及航行路径,并且任务文件信息还包括校准点和校准时间;
48.当推演的auv位置到达校准点时,推演模块进入校准过程,并等待校准时间;若在校准过程中,推演模块接收到校准北斗短信,则对auv位置进行矫正;若在校准过程中,推演模块未收到校准北斗短信,则在校准时间到达后,继续进行推演。
49.如图3结构所示,伸缩支撑架6竖直设置在柜体1的内边缘,包括外筒8、插销10、圆盘底座11、以及滑动套设于外筒8内的内筒9;外筒8的直径为15cm~30cm、且高度为100cm~120cm;外筒8的底端固定安装于柜体1的内底部;圆盘底座11固定安装于内筒9的顶部,用于支承北斗终端7;外筒8和内筒9均设置有多个通孔;插销10穿设于通孔中,将内筒9支承于预定高度;外筒8的内底部设置有用于对内筒9进行限位的限位环。内筒9的高度为90cm~100cm;圆盘底座11与内筒9焊接连接成一体结构;插销10采用合金钢材料制成且长度大于
外筒8的直径。
50.上述北斗终端7包括控制电路、北斗用户卡以及北斗天线。
51.本发明的多auv半离线战术推演系统具备室内室外两种工作模式,既可以将主机放置在室外利用轮子的可移动性,同时升起北斗终端7,对auv进行半离线的推演仿真;又可以将主机放置在室内,通过将北斗装置安装至其他高处,对auv进行半离线的推演仿真。该装置提高了多auv的实时性,解决了多个工作场地的使用问题,减少了管理成本。
52.如图1所示,一种多auv半离线战术推演系统,在硬件上主要包括:主控柜和北斗终端7以及连接电缆,其中主控柜内包含显示装置4、战术推演计算机2、输入装置3、滑轨、电源5、挡板、散热风扇、伸缩支撑架6、挡板把手。主控柜采用铝合金等材料形成外体框架,其内部固定安装显示装置4、战术推演计算机2、输入装置3、滑轨、电源5、挡板、散热风扇、伸缩支撑架6。连接电缆包含:通信电缆和供电电缆。
53.伸缩支撑架6包含圆盘底座11、内筒9、外筒8、插销10、底座;
54.战术推演计算机2运行战术推演软件,包含cpu、硬盘内存等通用计算机部件,用金属框架固定在主机柜的内部,电源5外部供电后,内部运行推演战术软件。由人机交互界面模块输出相关图像信息。
55.主机柜采用防水防盐雾的铝合金材质制作,柜体的尺寸为800mm
×
800mm
×
1200mm,主机柜安装在底座上,底座配置4个滚轮,便于移动。主机柜主要分4层,每层用金属底板进行隔开,从下至上为一至四层。
56.第一层主要安装电源5,外接室电供电,由电源5转换220v和24v,其中:220v为显示装置4、战术推演计算机2供电;24v为输入输出和北斗终端7供电。电源5安装在第一层金属底板上,通过螺丝将其固定,电源5线通过通孔将其引出。
57.第二层安装输入装置3,其中包括:键盘、鼠标以及滑轨。键盘需用卡槽将其固定,防止在移动或者运输时因震动颠簸损坏。由于该层需要将输入装置3以抽屉的方式抽出,需安装挡板,保障外观完整性,同时可以对输入装置3进行收纳。挡板是通过转轴方式与主机柜连接,在转动把手(19)后向外拉时,翻转挡板,并将输入装置3通过滑轨将其拖出。
58.第三层安装战术推演计算机2,安装战术推演计算机2时需打开挡板,计算机需用螺栓将其固定在金属底板上,安装完成后需将挡板锁死。因为该层在使用时不透气环境,需进行在计算机后方需增加独立散热风扇,
59.第四层安装显示装置4,主要为滑轨和显示屏,在显示屏下方需增加减震措施,防止在移动或者运输时因震动颠簸损坏。在使用时,可以将滑轨抽出,将显示装置4向上翻起即可。
60.抽屉式滑轨为一般的内置钢珠式抽屉结构。
61.伸缩支撑架6竖立在主机柜的内边缘,分为外筒8和内筒9。外筒8直径在15~30cm,具体参考北斗终端7的大小。外筒8高度为1~1.2m,内筒9高度在0.9~1m。伸缩支撑架6将外筒8通过焊接或者通过螺丝固定在主机柜内部,内筒9无需固定,直接以套筒的形式放入外筒8内部,外筒8有通孔是用于穿北斗终端7通信电缆,外筒8底部有底座,底座内径需小于内筒9外径,使内筒9不会掉落而压断电缆,北斗终端7多余电缆可以盘踞在第一层空间内。内筒9会打穿通孔,当内筒9被支撑起一定高度时,利用插销10穿过通孔,使其内筒9坐落于插销10上,插销10采用合金钢材质,长度需大于外筒8直径。插销10若使用圆形长柱体时,则需
要在其中钻孔,使其它插销10可以穿过,保证内筒9使用的稳定性。
62.北斗终端7必须放置在室外,在主机柜室外使用时可通过螺丝安装在圆盘底座11上,通过伸缩支撑架6支撑北斗终端7;在主机柜室内使用时,北斗终端7可从圆盘底座11拆卸,人为将北斗终端7移至高处。圆盘底座11通过焊接的方式与内筒9进行连接成一体结构,北斗终端7通信电缆通过内筒9的中空结构将其穿过伸缩支撑架6内部与输入装置3连接。
63.主控柜内部的输入装置3为计算机键盘和鼠标等通用装置,用于将任务文件等数据导入推演战术计算机。北斗终端7内部包含控制电路、北斗用户卡、北斗天线等组成,可实现北斗短信收发和示位的功能。使用时,北斗终端7需置于户外,用以接收北斗短信信息,并通过连接线缆连接到主控柜。
64.战术推演软件主要包含:人机输入模块、人机交互界面模块、推演模块、北斗状态接收模块、海洋电子地图等。该软件加载海洋电子地图,人机输入规划的航路文件信息,北斗状态接收模块接收auv发送的位置、电量、状态等信息的北斗短信,并将接收到的信息发送到人机交互界面模块和推演模块,由推演模块更新auv的位置、电量、状态等信息。当未收到auv的北斗短信时,对多个auv按照规划的航路进行推演;当接收到多个auv的北斗短信时,可由推演模块更新对应auv的位置、电量、状态等信息,并在海洋电子地图上进行更新显示。
65.如附图3所示,一种多auv半离线战术推演系统启动后,推演战术软件自动运行,加载需要监测auv的任务文件航路。等待auv启动自主执行任务时,发送的启动任务北斗信息,收到启动任务北斗信息后,推演模块启动运算,并开始auv推演,执行任务期间,收到auv北斗示位短信后,对auv位置和状态信息进行显示。
66.推演模块在未收到北斗短信期间,执行任务的auv,将按照任务文件内的航路进行推演,参照既定的航速、深度和轨迹在人机交互模块上进行绘制。若推演auv航行至功能点上时,参照试验过程经验,模拟auv等待,并提示正在执行相关功能动作。
67.在推演auv航迹过程中,若收到auv北斗示位短信在推演的航段前,则参照auv实际位置与航段方向的反向延长线45
°
夹角的点进行航行;若收到auv北斗示位短信在推演的航段后,则跳过当前推演航段,从auv实际位置与航段上呈45
°
夹角进行航行;若收到auv北斗示位短信在推演的航段中,从auv实际位置与航段上呈45
°
夹角进行航行。
68.当推演到达校准点时,等待校准时间t;若在校准过程中,收到校准北斗短信,则对auv位置进行矫正;若在校准过程中,未收到校准北斗短信,则t时间到达后,继续进行推演。
69.当推演提前到达航路终点,则等待auv发送任务结束北斗短信;当推演比auv后到达航路终点,在收到任务结束北斗短信后,推演结束。
70.当推演到达任务点,则根据任务时长,等待任务时间t1;若在执行任务过程中,收到示位北斗短信,则对auv位置进行矫正,并继续执行任务;若在执行任务过程中,未收到北斗示位短信,则t1时间到达后,继续进行推演。
71.而当多个auv执行任务时,不同的auv通过北斗短信发送来的状态、电量、位置等信息,则在推演战术软件内提示“收到某auv的北斗定位信息”。推演模块接收到不同的北斗短信信息,判断是否为执行任务的auv编号;如果是,则切换auv编号更新推演模块内auv实际位置;如果不是,则仅提示收到北斗信息,同时在人机交互界面模块上对非执行当前任务的auv位置进行标注,或者切换与之使用auv相对应的任务航路
72.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1