铺设地下光缆的系统和方法与流程
铺设地下光缆的系统和方法
[0001]
相关申请的交叉引用
[0002]
本申请要求2019年7月24日提交的标题为“systems for laying underground fiber optic cable”的美国临时专利申请第62/878,152号和2020年7月21日提交的标题为“systems and methods for laying underground fiber optic cable”的美国非临时专利申请第16/934,716号的权益,这两个申请的全部公开内容通过引用并入本文。
[0003]
附图简述
[0004]
附图示出了许多示例实施例,并且是说明书的一部分。这些附图结合以下描述一起展示并解释了本公开的各种原理。
[0005]
图1是根据本公开的至少一个实施例的用于铺设地下光缆的系统的横截面侧视图。
[0006]
图2是根据本公开的至少一个附加实施例的用于铺设地下光缆的系统的侧视图。
[0007]
图3是图2的系统的横截面透视图。
[0008]
图4是图2的系统的一部分的后视横截面透视图。
[0009]
图5是图2的系统的一部分的正面横截面透视图。
[0010]
图6是根据本公开的至少一个另外的实施例的用于铺设地下光缆的系统的横截面侧视图。
[0011]
图7是根据本公开的至少另一个实施例的用于铺设地下光缆的系统的横截面侧视图。
[0012]
图8是根据本公开的至少一个附加实施例的用于铺设地下光缆的系统的侧视图。
[0013]
图9是根据本公开的至少一个实施例的用于铺设地下光缆的系统的卷轴部分(spool section)的横截面侧视图。
[0014]
图10是根据本公开的至少一个实施例的用于铺设地下光缆的系统的侧视图。
[0015]
图11是示出根据本公开的至少一个实施例的铺设地下光缆的方法的流程图。
[0016]
虽然本文和附图中描述的示例实施例易于进行各种修改和替代形式,但是具体实施例在附图中已经通过示例的方式示出,并且将在本文详细描述。然而,本文描述的示例实施例并不旨在局限于所公开的特定形式。更确切地,本公开覆盖了落入本公开范围内的所有修改、等同物和替代物。附图不一定按比例绘制,并且可以被认为是本文描述的实施例的示意性表示。
[0017]
示例实施例的详细描述
[0018]
随着电子通信需求的增长,需要改进通信基础设施来满足需求。光纤通常提供高速且大体上可靠的电子通信。光缆可以位于地面以上,例如通过电线杆。但是,电线杆和相关的电缆可能会很显眼,并且容易因天气事件或其他事故而磨损或损坏。因此,许多社区要求在地下安装新的光缆。
[0019]
地下光缆的铺设通常涉及使用大型且昂贵的机械和/或大量人力。例如,在一些情况下,形成沟槽,并将光缆铺设在沟槽中。在其他情况下,可以使用定向钻机来钻孔,可以在钻孔中铺设光缆。在任何情况下,机械和/或过程都可能导致道路堵塞,有时甚至导致道路
封闭。此外,铺设地下光缆的传统方法通常需要很长时间才能完成。
[0020]
本公开大体上涉及用于铺设地下光缆的系统和方法。在一些实施例中,本公开可包括机器人(例如,远程操作的、自主的或部分自主的)系统,该系统包括驱动主体、位于驱动主体内的至少一个旋转马达、可旋转地耦合到驱动主体并定位成由至少一个旋转马达在第一旋转方向上旋转的前螺旋推运器(forward auger)元件、以及可旋转地耦合到驱动主体并定位成由至少一个旋转马达在相反的第二旋转方向上旋转的后螺旋推运器(rear auger)元件。
[0021]
在一些示例中,系统可以自主操作(例如,在钻孔操作期间不需要操作者的参与)。例如,该系统最初可以被提供期望的起点和终点的全球定位系统(“gps”)坐标。系统可以使用该信息自主地从起点前进到终点,而无需进一步的指令。
[0022]
在一些实施例中,旋转马达可包括第一旋转马达和第二旋转马达,第一旋转马达被配置成沿第一旋转方向旋转前螺旋推运器元件,第二旋转马达被配置成沿相反的第二旋转方向旋转后螺旋推运器元件。驱动主体可以包括位于旋转马达之间的一个或更多个柔性接合部,例如以便于地下系统的转向(steering)。转向机构可以被包括并被配置为重新定向系统的地下移动的方向。
[0023]
在一些示例中,地下钻头可以位于前螺旋推运器元件的前面,以例如钻透地下地层(例如,岩石、页岩、硬土等)。可选地,钻孔系统可以采用推进系统(例如,钻柱)以足够的力向前推动钻机穿过地下障碍物。
[0024]
物体传感器(例如,伽马射线传感器、声纳传感器等)可以被定位和配置成感测在系统前面的土壤中的障碍物(例如,岩石、巨砾、根系、管道、建筑地基等)。在一些示例中,该系统可以包括一个或更多个导向翅片(fins)和/或一个或更多个阻力/摩擦设备,以便于在土壤中转向。因此,该系统可以被配置为自主地或在远程操作者的指导下转向绕过感测到的障碍物。通过避开障碍物,该系统可以保持在相对简单且快速地穿过的土壤中,与传统方法相比,这可以提高在地下铺设光缆的速度。
[0025]
在一些示例中,术语“土壤”可以指任何地下地层,包括但不限于有机物、矿物质、沙子、页岩、岩石或其任意组合。
[0026]
该系统还可以包括用于确定其位置和/或定向的传感器,例如惯性测量单元(imu)和/或gps接收器。例如,imu可以包括一个或更多个加速度计和/或陀螺仪。在系统的操作、引导、控制和/或移动期间,可以使用相关联的滤波算法来帮助找到系统的位置和/或定向。
[0027]
在一些示例中,该系统可以包括安装在后螺旋推运器元件上或其中的光纤卷轴。光纤卷轴可以被配置成当系统在地下行进时在系统后面释放光缆。可替代地或附加地,该系统可以包括柔性导管卷轴,并且可以被配置为当系统在地下行进时在系统后面释放柔性导管。
[0028]
用于向至少一个马达供电的电池电源可以位于驱动主体、前螺旋推运器元件和/或后螺旋推运器元件中的至少一个内。在附加实施例中,电源可以包括从后螺旋推运器元件延伸到地面上的电源元件的电源电缆。
[0029]
在一些示例中,该系统可以包括通信接口(例如,无线或有线通信接口),该通信接口被配置为实现系统和远程操作者之间的电子通信。
[0030]
参考图1-图10,下面将提供用于铺设地下光缆的各种示例系统和设备的详细描
述。参考图11,下面将提供铺设地下光缆的示例方法的详细描述。
[0031]
图1是根据本公开的至少一个实施例的用于铺设地下光缆102的系统100的横截面侧视图。系统100可以包括地下钻孔设备104,其被配置为当地下钻孔设备104行进穿过土壤时将光缆102铺设在土壤中。
[0032]
地下钻孔设备104可包括驱动主体106和至少部分位于驱动主体106内的至少一个旋转马达108。例如,至少一个旋转马达108可以包括第一旋转马达108a和第二旋转马达108b。可替代地,至少一个旋转马达108可以是具有两个输出的单个旋转马达,这两个输出被配置为沿相反的旋转方向(例如,分别为顺时针和逆时针)旋转。
[0033]
前螺旋推运器元件110可旋转地耦合到驱动主体106的前侧,以及后螺旋推运器元件112可旋转地耦合到驱动主体106的后侧。例如,滚柱轴承113可以将驱动主体106可旋转地耦合到前螺旋推运器元件110和后螺旋推运器元件112。
[0034]
前螺旋推运器元件110可以被定位和配置成由第一旋转马达108a(或单个旋转马达的第一输出)在第一旋转方向a(例如,当从地下钻孔设备104的前方观察时为逆时针方向)上旋转。前螺旋推运器元件110可以包括前圆柱形主体114和从前圆柱形主体114径向向外延伸的前螺旋翅片116。前螺旋翅片116可以是单个连续元件,或者可以包括两个或更多个段。前螺旋翅片116可以具有当前螺旋推运器元件110沿第一旋转方向a旋转时向前推动地下钻孔设备104的形状。
[0035]
第一旋转马达108a可以包括相应的第一输出轴109a,用于驱动前螺旋推运器元件110的旋转。当第一旋转马达108a被启动时,第一输出轴109a可以与前圆柱形主体114的内表面接合,以驱动前圆柱形主体114相对于驱动主体106旋转。举几个示例,第一输出轴109a可以与前圆柱形主体114的内表面摩擦接合,第一输出轴109a的齿轮齿可以与前圆柱形主体114的内表面上的相应齿轮齿相互啮合,第一输出轴109a可以焊接、粘接或以其他方式刚性耦合到前圆柱形主体114,等等。
[0036]
后螺旋推运器元件112可被定位和配置成由第二旋转马达108b(或单个旋转马达的第二输出)在相反的第二旋转方向b(例如,当从地下钻孔设备104的前部观察时为顺时针方向)上旋转。后螺旋推运器元件112可包括后圆柱形主体118和从后圆柱形主体118径向向外延伸的后螺旋翅片120。后螺旋翅片120可以是单个连续元件,或者可以包括两个或更多个段。后螺旋翅片120可以具有当后螺旋推运器元件112沿第二旋转方向b旋转时向前推动地下钻孔设备104的形状。
[0037]
第二旋转马达108b可以包括相应的第二输出轴109b,用于驱动后螺旋推运器元件112的旋转。当第二旋转马达108b被启动时,第二输出轴109b可以与后圆柱形主体118的内表面接合,以驱动后圆柱形主体118相对于驱动主体106旋转。举几个示例,第二输出轴109b可以与后圆柱形主体118的内表面摩擦接合,第二输出轴109b的齿轮齿可以与后圆柱形主体118的内表面上的相应齿轮齿相互啮合,第二输出轴109b可以焊接、粘接或以其他方式刚性耦合到后圆柱形主体118,等等。
[0038]
当第一旋转马达108a和第二旋转马达108b同时运行时,分别沿相反方向a和b旋转前螺旋推运器元件110和后螺旋推运器元件112可以有助于抵消合成马达扭矩。后螺旋推运器元件112可充当锚,第一旋转马达108a和前螺旋推运器元件110可抵靠该锚推动以旋转,并且前螺旋推运器元件110可充当锚,第二旋转马达108b和后螺旋推运器元件112可抵靠该
锚推动以旋转。这种构造和操作可以使地下钻孔设备104向前行进穿过土壤。
[0039]
驱动主体106、前圆柱形主体114、前螺旋翅片116、后圆柱形主体118和后螺旋翅片120可各自包括具有用于暴露于地下地层并钻透地下地层(例如土壤、岩石、沙子等)的合适硬度、耐磨性和耐久性的材料。作为示例而非限制,包括在这些部件中的材料可以是或包括钢材料(例如,钢铸件、钢锻件、机加工钢等)、渗透有金属合金粘结剂的硬颗粒(例如碳化钨)、烧结碳化物材料、硼化物材料等。
[0040]
在一些示例中,驱动主体106可以包括柔性接合部122,以便于使地下钻孔设备104转动,例如用于避开地下障碍物和/或到达期望的终点。例如,柔性接合部122可以使前螺旋推运器元件110相对于后螺旋推运器元件112成一角度(例如,未对准)。柔性接合部122可以被配置为呈现扭转刚度和弯曲柔性。地下钻孔设备104的转向可以通过例如以不同的速度或扭矩驱动第一旋转马达108a和第二旋转马达108b的旋转和/或通过启动转向机构来实现,如下面将参照图6和图7描述的。
[0041]
如图1所示,地下钻孔设备104可以包括安装在后螺旋推运器元件112上或其中的卷轴124(例如,光纤卷轴、柔性导管卷轴等)。例如,卷轴124可以被实现为光纤卷轴,其被配置为当系统100在地下行进时在系统100后面释放光缆102。在附加示例中,卷轴124可以被实现为柔性导管卷轴,其被配置为当系统100在地下行进时在系统100后面释放柔性导管。在柔性导管处于地下的适当位置之后,光缆102可以插入到柔性导管中。在一些实施例中,柔性导管可以被充气(例如,用加压空气),以提供用于使光缆102插入其中的空间。
[0042]
地下钻孔设备104可以包括通信接口126,该通信接口126可以被配置为实现地下钻孔设备104和远程操作者之间的电子通信。例如,通信接口126可以位于驱动主体106内、前螺旋推运器元件110内和/或后螺旋推运器元件112内。通信接口126可以被配置成促进与远程操作者的有线和/或无线通信。在有线通信的情况下,当地下钻孔设备104将光缆102铺设在地下时,光缆102可用于向通信接口126提供信号。远程操作者可以通过通信接口126向地下钻孔设备104提供控制信号,例如用于指示第一旋转马达108a和/或第二旋转马达108b旋转、停止旋转、增加旋转速度、降低旋转速度等。远程操作者可以包括可以向地下钻孔设备104提供指令的计算机。远程操作者的计算机可以是手动操作的、全自动操作的,或者在接收到来自人类用户的输入(例如,用于铺设光缆102的期望终点)之后自动操作的。
[0043]
电池电源128可以向第一旋转马达108a和第二旋转马达108b以及其他潜在的电气部件(例如,传感器、通信接口126等)提供电力。例如,电池电源128可以位于前螺旋推运器元件110中、后螺旋推运器元件112中和/或驱动主体106中。在一些示例中,电池电源128可以包括分布在前螺旋推运器元件110、后螺旋推运器元件112和/或驱动主体106的任意组合中的多个电池。
[0044]
可选地,地下钻孔设备104可以包括位于前螺旋推运器元件110前端的地下钻头130。地下钻头130可被构造成钻穿(例如,破碎、移动等)坚硬的土壤、岩石或其他地下地层,以便于地下钻孔设备104穿过土壤的移动。地下钻头130可以是或包括牙轮钻头、刮刀钻头(drag bit)、螺旋钻头、混合钻头或如地下钻孔领域中已知的任何其他合适的地下钻头130。所选择的地下钻头130的类型可以取决于地下钻孔设备104要钻透的土壤的类型(例如,硬度)。地下钻头130在图1中示意性地示出为具有比前螺旋推运器元件的前圆柱形主体114更小的直径。然而,本公开不限于此。在附加实施例中,地下钻头130可以具有与前圆柱
形主体114相同或比其更大的直径。
[0045]
在一些实施例中,地下钻孔设备104可以包括机载地面穿透物体传感器132。物体传感器132可以被定位和配置成感测在地下钻孔设备104前面的土壤中的障碍物(例如,巨砾、现有基础设施、压实的土壤等)。在检测到障碍物时,地下钻孔设备104可以转向绕过障碍物或者以某种方式(例如,以适当的速度)操作从而前进穿过障碍物。物体传感器132可以包括例如伽马射线传感器或声纳传感器。在附加实施例中,障碍物的定位可以由地上物体传感器感测,如下面参考图10所解释的。
[0046]
位置和定向传感器134也可以包括在系统100中。位置和定向传感器134可以被配置成感测地下钻孔设备104或其一部分(例如,驱动主体106、前螺旋推运器元件110和/或后螺旋推运器元件112)的位置(例如,定位)和定向(例如,横向角度、旋转角度等)。作为示例而非限制,位置和定向传感器134可以包括gps接收器、编码器、惯性测量单元(“imu”)、加速度计、陀螺仪、光纤布拉格(bragg)光栅定位传感器或其任意组合或其他合适的位置和定向传感器134。
[0047]
如图1所示,地下钻孔设备104可以具有长度l。长度l可以在大约50cm和大约150cm之间,例如大约90cm。前螺旋翅片116和后螺旋翅片116可以具有外螺旋直径d
a
。外螺旋直径d
a
可以在大约15cm和大约45cm之间,例如大约30cm。前圆柱形主体114和后圆柱形主体118可以具有外部主体直径d
b
。外部主体直径d
b
可以小于外螺旋直径d
a
,并且可以在大约10cm和大约30cm之间,例如大约19cm。驱动主体106可以具有外部驱动直径d
d
。外部驱动直径d
d
可以小于外部驱动直径d
b
,并且可以在大约5cm米和大约20cm之间,例如大约12cm。这些尺寸是作为示例而非限制提供的。地下钻孔设备104可以以各种尺寸和比例实现,例如这取决于待钻透的土壤的类型和硬度、待铺设的光缆的长度以及其他潜在因素。
[0048]
图2是根据本公开的至少一个附加实施例的用于铺设地下光缆的系统200的侧视图。图3是图2的系统的横截面透视图。图4是图2的系统的一部分的后视横截面透视图。图5是图2的系统的一部分的正面横截面透视图。
[0049]
参考图2和图3,在某些方面,系统200可以类似于上面参考图1描述的系统100。例如,系统200可包括地下钻孔设备204,其可包括驱动主体206、可旋转地耦合到驱动主体206的前螺旋推运器元件210和可旋转地耦合到驱动主体206的后螺旋推运器元件212。驱动主体206可以容纳至少一个旋转马达208。前螺旋推运器元件210可包括前圆柱形主体214和从前圆柱形主体214径向向外延伸的前螺旋翅片216。前螺旋翅片216可以被定位和构造成用于在第一方向上旋转前螺旋推运器元件210。后螺旋推运器元件212可包括后圆柱形主体218和从后圆柱形主体218径向向外延伸的后螺旋翅片220。后螺旋翅片220可以被定位和构造成用于在第二相反方向上旋转后螺旋推运器元件212。
[0050]
如图2所示,在一些示例中,前螺旋翅片216和后螺旋翅片220可以各自由单一的连续螺旋材料形成。当前螺旋推运器元件210和后螺旋推运器元件212在土壤中反向旋转时,前螺旋翅片216和后螺旋翅片220各自的角度可导致地下钻孔设备204沿向前的方向(例如,在图2的视角下从左到右)行进穿过土壤。
[0051]
如图3-图5所示,驱动主体206可以容纳第一旋转马达208a和第二旋转马达208b的至少一部分。旋转马达208的基座可以刚性耦合到驱动主体206。旋转马达208和/或驱动主体206的基座可以例如通过滚柱轴承213可旋转地耦合到相应的前螺旋推运器元件210和后
螺旋推运器元件212。滚柱轴承213可以促进驱动主体206与前螺旋推运器元件210和后螺旋推运器元件212之间的相互旋转,同时保持驱动主体206与前螺旋推运器元件210和后螺旋推运器元件212之间的轴向耦合。
[0052]
如图4和图5所示,第一旋转马达208a的第一输出轴可包括第一齿轮236a,第二旋转马达208b的第二输出轴可包括第二齿轮236b。互补的第一组内齿238a可以被固定(例如,焊接、粘接、压配合、螺栓连接、整体形成等)到前圆柱形主体214的内表面。第一齿轮236a可以与第一组内齿238a啮合。同样,互补的第二组内齿238b可以被固定(例如,焊接、粘接、压配合、螺栓连接、整体形成等)到后圆柱形主体218的内表面。第二齿轮236b可以与第二组内齿238b啮合。因此,当第一旋转马达208a和第二旋转马达208b被启动时,齿轮236a、236b可以通过内齿238a、238b分别向前螺旋推运器元件210和后螺旋推运器元件212施加旋转力。
[0053]
图6是根据本公开的至少一个另外的实施例的用于铺设地下光缆的系统600的横截面侧视图。在某些方面,系统600可以类似于上面参考图1描述的系统100。例如,系统600可以包括用于容纳第一旋转马达608a和第二旋转马达608b的驱动主体606、可旋转地耦合到驱动主体606并由第一旋转马达608a驱动的前螺旋推运器元件610、以及可旋转地耦合到驱动主体606并由第二旋转马达608b驱动的后螺旋推运器元件612。
[0054]
如图6所示,系统600还可以包括转向机构640,用于在系统600行进穿过土壤时定向系统600。例如,转向机构640可包括从驱动主体606的相对侧径向向外延伸的大致平面的矩形舵642。转向马达644可操作地耦合到舵642,用于相对于驱动主体606转动舵642,以在期望的方向上转向系统600。
[0055]
图7是根据本公开的至少另一个实施例的用于铺设地下光缆702的系统700的横截面侧视图。在某些方面,系统700可以类似于上面参考图1描述的系统100,并且类似于上面参考图6描述的系统600。例如,系统700可以包括用于容纳第一旋转马达708a和第二旋转马达708b的驱动主体706、可旋转地耦合到驱动主体706并由第一旋转马达708a驱动的前螺旋推运器元件710、以及可旋转地耦合到驱动主体706并由第二旋转马达708b驱动的后螺旋推运器元件712。
[0056]
系统700还可包括转向机构740,其可包括从驱动主体706径向向外延伸的弯曲舵742。转向马达744可操作地耦合到舵742,以相对于驱动主体706转动舵742。当系统700前进穿过土壤时,舵742的弯曲形状可有助于舵742切入土壤,例如用于避免被岩石或其他硬沉积物卡住。
[0057]
图8是根据本公开的至少一个附加实施例的用于铺设地下光缆的系统800的侧视图。系统800可以包括螺旋推运器元件810,该螺旋推运器元件810可以包括圆柱形主体814和从圆柱形主体814径向向外延伸的螺旋翅片816。可以采用卷轴824以在系统800行进穿过地下地层(例如土壤)时在系统800后面铺设光缆和/或柔性导管。由于系统800仅包括一个螺旋翅片816,系统800可由钻柱或其他刚性或半刚性推动机构驱动。系统800可包括一个或更多个电池电源828,例如用于为物体传感器832、位置传感器834、定向传感器835或系统800上或系统800中的任何其他电气部件供电。
[0058]
图9是根据本公开的至少一个实施例的用于铺设地下光缆902的系统900的卷轴924部分的横截面侧视图。卷轴924可以由系统900的后圆柱形主体912支撑。卷轴924可以在后圆柱形主体912内并相对于后圆柱形主体912旋转。例如,轴承946可以位于卷轴924和后
圆柱形主体912的内表面之间。轴承946可以使卷轴924能够相对于后圆柱形主体912的内表面滚动和/或滑动。在一些实施例中,轴承946也可以被配置为呈现振动阻尼(dampening)。例如,轴承946可以是或包括柔性(例如,弹性)材料以阻尼振动。振动的阻尼可以减少对光缆902的潜在损害。
[0059]
关于图9描述的与卷轴924相关的概念可以适用于上述系统100、200、600、700、800中的任何一个。
[0060]
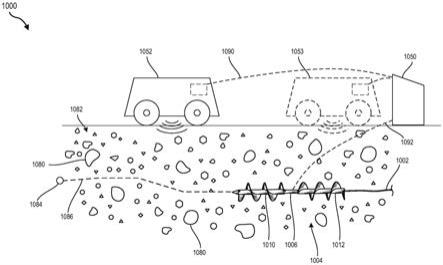
图10是根据本公开的至少一个实施例的用于铺设地下光缆1002的系统1000的侧视图。系统1000可以包括地下钻孔设备1004、用于控制地下钻孔设备1004的远程操作者1050、以及用于感测地下钻孔设备1004前方的土壤1082中的障碍物1080的至少一个地上传感器设备1052。地下钻孔设备1004可以是参照图1-图9中任一个描述的设备或系统。在一些示例中,地下钻孔设备1004可以包括驱动主体1006、前螺旋推运器元件1010和后螺旋推运器元件1012。
[0061]
如上所述,当地下钻孔设备1004行进穿过土壤1082时,前螺旋推运器元件1010可定位成沿第一旋转方向(例如,从地下钻孔设备1004的前部观察时为逆时针方向)旋转,后螺旋推运器元件1012可定位成沿相反的第二旋转方向(例如,从地下钻孔设备1004的前部观察时为顺时针方向)旋转。光缆1002可被保持在后螺旋推运器元件1012内,并在地下钻孔设备1004向前移动(例如,从图10的视角看为向左移动)时被释放到土壤1080中。
[0062]
远程操作者1050可以包括计算机(例如,膝上型计算机、移动设备、平板计算机等),其可以包括用于向地下钻孔设备1004提供指令的用户界面。在一些实施例中,远程操作者1050可以例如经由有线或无线连接1090从地上传感器设备1052接收指示土壤1082中障碍物1080的定位的数据。远程操作者1050可以使用来自地上传感器设备1052的该数据,经由另一有线或无线连接1092,自动向地下钻孔设备1004的通信接口发送指令,以转向远离土壤1082中识别的障碍物1080。在有线连接的情况下,在一些示例中,远程操作者1050可以经由光缆1002向地下钻孔设备1004发送数字指令。
[0063]
例如,在地下钻孔设备1004位于地下以开始钻孔和光缆铺设操作时或之前,可以将期望的终点1084输入到远程操作者1050中。地上传感器设备1052可以使用地面穿透物体传感器(例如,伽马射线传感器、声纳传感器等)来感测障碍物1080并识别它们在土壤1082中的定位。例如,在地下钻孔设备1004前进时,地上传感器设备1052可以自动地或手动地在土壤1082的表面上移动。可选地,一个或更多个附加的地上传感器设备1053可以位于土壤1082的表面上的不同定位。在一些实施例中,具有多个地上传感器设备1052、1053的这种配置可以通过同时使用来自各种地上传感器设备1052、1053上的物体传感器的数据来帮助定位障碍物1080。
[0064]
如果在地下钻孔设备1004的初始建议路径中识别出障碍物1080,则远程操作者1050可以指示地下钻孔设备1004转向以避开障碍物1080。与不感测和避开土壤中的障碍物的其他(例如,传统的)系统相比,这种对障碍物1080的感测和避开可以提高地下钻孔设备1004的钻孔效率。
[0065]
如上参考图1所述,在一些实施例中,地下钻孔设备1004可以包括机载物体传感器。在这些情况下,地上感测设备1052可以从系统1000中省略。在附加实施例中,地上感测设备1052、1053可以扫描起点到输入终点1084之间的土壤区域,以在地下钻孔设备1004行
进穿过土壤之前识别障碍物1080。对应于障碍物1080的定位的数据可以被上传到远程操作者1050和/或直接上传到地下钻孔设备1004,用于绘制穿过土壤1082的建议路径1086。在一些示例中,地下钻孔设备1004可以自主地(例如,在不需要人类操作者的进一步输入的情况下)在地下从起点行进到输入终点1084。
[0066]
图11是示出根据本公开的至少一个实施例的铺设地下光缆的方法1100的流程图。在操作1110,地下钻孔设备的前螺旋推运器元件可以在第一旋转方向上旋转。操作1110可以以多种方式执行。例如,上述任何示例前螺旋推运器元件可以通过容纳在地下钻孔设备的驱动主体内的第一旋转马达而在第一方向上旋转。在一些实施例中,前螺旋推运器元件的旋转可以由远程操作者控制。
[0067]
在操作1120,地下钻孔设备的后螺旋推运器元件可以在相反的第二旋转方向上旋转。操作1120可以以多种方式执行。例如,上述任何示例后螺旋推运器元件可以通过容纳在驱动主体内的第二旋转马达或者通过第一旋转马达的另一输出而在第二方向上旋转。在一些实施例中,后螺旋推运器元件的旋转可以由远程操作者控制。
[0068]
在操作1130,光缆或柔性导管中的至少一个可以被释放到后螺旋推运器元件后面的土壤中。操作1130可以以多种方式执行。例如,后螺旋推运器元件可以容纳用于保持光缆或柔性导管的卷轴。当地下钻孔设备沿着地下路径行进时,光缆或柔性导管可以从卷轴上展开以放置在土壤中。在一些示例中,可充气柔性导管可以被释放到土壤中,并且随后可以被充气以插入光缆。
[0069]
在一些示例中,至少一个障碍物可以在前螺旋推运器元件前面的土壤中被感测,例如通过地下钻孔设备和/或地上感测设备中的物体传感器被感测。地下钻孔设备可以被转向以避开障碍物,例如利用参照图6和图7描述的舵。
[0070]
因此,与传统系统相比,本公开的实施例包括能够相对快速、廉价和不引人注目地铺设地下光缆的系统和方法。通过感测和避开障碍物,用于铺设地下光缆的地下钻孔设备相比于采用没有感测和避开障碍物的钻孔的系统可以更快地行进穿过更容易钻透的土壤。
[0071]
以下示例实施例也包括在本公开中。
[0072]
示例1:一种用于铺设地下光缆的系统,其可以包括:驱动主体;至少部分位于驱动主体内的至少一个旋转马达;前螺旋推运器元件,其可旋转地耦合到驱动主体,并被定位成由至少一个旋转马达在第一旋转方向上旋转;以及后螺旋推运器元件,该后螺旋推运器元件可旋转地耦合到驱动主体,并被定位成由至少一个旋转马达在相反的第二旋转方向上旋转。
[0073]
示例2:根据示例1所述的系统,其中至少一个旋转马达包括:第一旋转马达,其被定位成在第一旋转方向上旋转前螺旋推运器元件;以及第二旋转马达,其定位成在相反的第二旋转方向上旋转后螺旋推运器元件。
[0074]
示例3:根据示例2所述的系统,其中驱动主体包括位于第一旋转马达和第二旋转马达之间的柔性接合部。
[0075]
示例4:根据示例1至3中任一项所述的系统,所述系统还可包括转向机构,该转向机构被配置为重新定向该系统的地下移动方向。
[0076]
示例5:根据示例1至4中任一项所述的系统,该系统还可包括位于前螺旋推运器元件前方的地下钻头。
[0077]
示例6:根据示例1至5中任一项所述的系统,该系统还可包括物体传感器,该物体传感器被定位和配置成感测系统前方土壤中的障碍物。
[0078]
示例7:根据示例6所述的系统,其中物体传感器包括以下至少一个:伽马射线传感器;或者声纳传感器。
[0079]
示例8:根据示例1至7中任一项所述的系统,该系统还可包括安装在后螺旋推运器元件上或后螺旋推运器元件中的光纤卷轴,其中光纤卷轴被配置成当系统在地下行进时在系统后面释放光缆。
[0080]
示例9:根据示例1至8中任一项所述的系统,该系统还可包括位于以下项中至少一个内的电池电源:驱动主体;前螺旋推运器元件;或者后螺旋推运器元件。
[0081]
示例10:根据示例1至9中任一项所述的系统,该系统还可以包括通信接口,该通信接口被配置为实现在系统和远程操作者之间进行电子通信。
[0082]
示例11:根据示例1至10中任一项所述的系统,该系统还可包括被配置为确定系统的位置和定向的至少一个位置和定向传感器。
[0083]
示例12:根据示例11所述的系统,其中该系统被配置为自主地在地下从起点行进到输入终点。
[0084]
示例13:根据示例1至12中任一项所述的系统,该系统还可包括安装在后螺旋推运器元件上或后螺旋推运器元件中的柔性导管卷轴,其中柔性导管卷轴被配置成当系统在地下行进时在系统后面释放柔性导管。
[0085]
示例14:一种用于铺设地下光缆的系统,该系统可以包括:地下钻孔设备,该地下钻孔设备包括被定位成沿第一旋转方向旋转的前螺旋推运器元件以及定位成沿相反的第二旋转方向旋转的后螺旋推运器元件;以及地上传感器设备,该地上传感器设备包括:地面穿透物体传感器,其被配置为感测地下钻孔设备前面的土壤中的障碍物,其中地上传感器设备与地下钻孔设备通信,并且地下钻孔设备被配置为转向绕过由地上传感器设备识别的障碍物。
[0086]
示例15:根据示例14所述的系统,其中地上传感器设备包括被配置为在土壤表面上移动的移动车辆。
[0087]
示例16:根据示例15所述的系统,其中移动车辆包括无人驾驶移动车辆。
[0088]
示例17:根据示例14至16中任一项所述的系统,其中地上传感器设备与地下钻孔设备进行有线通信。
[0089]
示例18:一种铺设地下光缆的方法,该方法可以包括:在第一旋转方向上旋转地下钻孔设备的前螺旋推运器元件;在相反的第二旋转方向上旋转地下钻孔设备的后螺旋推运器元件;以及将光缆或柔性导管中的至少一个释放到后螺旋推运器元件后面的土壤中。
[0090]
示例19:根据示例18所述的方法,该方法还可包括:感测前螺旋推运器元件前方土壤中的至少一个障碍物;以及使地下钻孔设备转向以避开障碍物。
[0091]
示例20:根据示例19所述的方法,其中通过地上传感器设备上的物体传感器来执行对至少一个障碍物的感测。
[0092]
本文描述和/或说明的过程参数和步骤顺序仅作为示例给出,并且可以根据需要改变。例如,虽然本文所示和/或所述的步骤可以以特定顺序示出或讨论,但是这些步骤不一定需要以所示或讨论的顺序执行。本文描述和/或示出的各种示例方法也可以省略本文
描述或示出的一个或更多个步骤,或者包括除了那些公开的步骤之外的附加步骤。
[0093]
已经提供了前面的描述,以使本领域的其他技术人员能够最好地利用本文公开的示例实施例的各个方面。该示例描述并不旨在穷举或限制于任何公开的精确形式。在不脱离本公开的精神和范围的情况下,许多修改和变化是可能的。本文公开的实施例应该被认为在所有方面都是说明性的,而不是限制性的。在确定本公开的范围时,应当参考所附的任何权利要求及其等同物。
[0094]
除非另有说明,否则说明书和/或权利要求中使用的术语“连接到”和“耦合到”(及其派生词)应被解释为允许直接和间接(即,通过其他元件或部件)连接。此外,说明书和/或权利要求中使用的术语“一个(a)”或“一个(an)”,应理解为
“…
中的至少一个”。最后,为了便于使用,说明书和/或权利要求中使用的术语“包括(including)”和“具有”(及其派生词)可与单词“包括(comprising)”互换,并具有与其相同的含义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1