显影盒的制作方法
1.本公开涉及一种显影盒。
背景技术:
2.传统地,已知有电子照相型成像设备(诸如激光打印机和led打印机)。这种传统的成像设备包括显影盒。显影盒包括用于供应显影剂的显影辊。专利文献1中公开了这样的传统成像设备中的一种。其中描述的成像设备包括鼓盒,该鼓盒包括感光鼓。显影盒可附接到鼓盒。在将显影盒附接到鼓盒时,感光鼓和显影辊彼此接触。
3.[引用列表]
[0004]
[专利文献]
[0005]
[ptl 1]
[0006]
日本专利申请公开号2011
‑
59510
技术实现要素:
[0007]
[技术问题]
[0008]
根据专利文献1的成像设备可在显影辊和感光鼓彼此接触的状态与显影辊和感光鼓彼此分离的状态之间切换。在根据专利文献1的成像设备中,用于移动显影盒以将显影辊与感光鼓分离的部件设置在鼓单元的每一侧。每一侧的部件必须从成像设备的主体接收驱动力。
[0009]
有鉴于此,本公开的目的是提供一种显影盒,该显影盒能够通过仅从一侧传递的驱动力提供显影辊和感光鼓之间的分离,而无需向两侧施加驱动力。
[0010]
[问题的解决方案]
[0011]
根据本公开的第一方面,提供了一种包括壳体、显影辊和第一凸轮的显影盒。壳体被构造成在其中容纳显影剂。显影辊能够绕在第一方向上延伸的显影辊轴线旋转并且能够与感光鼓接触。显影辊具有周边表面,周边表面的一部分在第二方向上暴露于壳体的外部,并且在第二方向上与所暴露的部分相对的周边表面的另一部分定位在壳体内部。第一凸轮定位在壳体在第二方向上的一端部分的外表面处。第一凸轮能够在第三方向上相对于壳体和显影辊在第一位置和第二位置之间移动,第二位置在第三方向上距离显影辊比第一位置距离显影辊更近。第一凸轮具有第一倾斜表面和第二倾斜表面。第一倾斜表面被构造成接收从壳体在第一方向上的一端部分朝向壳体在第一方向上的另一端部分的按压力。第二倾斜表面和壳体之间在第二方向上的距离随着第二倾斜表面在第三方向上远离显影辊延伸而变化。第一凸轮能够响应于向第一倾斜表面施加按压力而在第一位置和第二位置之间移动。
[0012]
根据本公开的第二方面,在第一方面的显影盒附接到包括感光鼓的鼓盒的状态下,第二倾斜表面在第一凸轮的第一位置处与鼓盒的一部分接触;并且第二倾斜表面在第一凸轮的第二位置处与鼓盒的该一部分分离。
[0013]
根据本公开的第三方面,在第二方面的显影盒中,第一凸轮根据第一凸轮在第一位置和第二位置之间的移动,与壳体和显影辊一起在第二方向上相对于感光鼓移动。
[0014]
根据本公开的第四方面,在第三方面的显影盒中,随着第二倾斜表面在第三方向上远离显影辊延伸,第二倾斜表面和壳体之间在第二方向上的距离增加。显影辊在第一凸轮的第一位置处与感光鼓接触,并且显影辊在第一凸轮的第二位置处与感光鼓分离。
[0015]
根据本公开的第五方面,在第一至第四方面中任一方面的显影盒中,第一倾斜表面相对于第一方向倾斜。
[0016]
根据本公开的第六方面,在第一至第五方面中任一方面的显影盒中,第二倾斜表面相对于第二方向和第三方向倾斜。
[0017]
根据本公开的第七方面,在第一至第六方面中任一方面的显影盒中,第二方向与第一方向交叉;并且第三方向与第一方向与第二方向交叉。
[0018]
根据本公开的第八方面,第一至第七方面中任一方面的显影盒还包括从第二位置朝向第一位置推动第一凸轮的第一弹性构件。
[0019]
根据本公开的第九方面,在第八方面的显影盒中,显影辊定位在壳体在第三方向上的一端部分处;并且第一弹性构件从壳体在第三方向上的一端部分朝向壳体在第三方向上的另一端部分推动第一凸轮。
[0020]
根据本公开的第十方面,在第八或第九方面的显影盒中,第一弹性构件是弹簧。
[0021]
根据本公开的第十一方面,在第十方面的显影盒中,弹簧是螺旋弹簧。
[0022]
根据本公开的第十二方面,在第八至第十一方面中任一方面的显影盒中,第二倾斜表面倾斜成随着在第三方向上远离显影辊延伸而增加第二倾斜表面和壳体之间在第二方向上的距离;第一弹性构件在第一凸轮的第一位置处在第三方向上具有第一长度;并且第一弹性构件在第一凸轮的第二位置处在第三方向上具有小于第一长度的第二长度。
[0023]
根据本公开的第十三方面,在第八至第十二方面中任一方面的显影盒中,壳体在第三方向上具有一端部分和另一端部分;第一凸轮具有从壳体在第三方向上的一端部分朝向壳体在第三方向上的另一端部分在第三方向上凹入的凹部;并且第一弹性构件在第三方向上具有定位在凹部的底部上的一端。
[0024]
根据本公开的第十四方面,第一至第七方面中任一方面的显影盒还包括第一引导轴,该第一引导轴在第三方向上延伸并且定位在壳体在第二方向上的一端部分的外表面处。第一凸轮能够沿着第一引导轴在第三方向上移动。
[0025]
根据本公开的第十五方面,在第十四方面的显影盒中,第一引导轴在第三方向上具有一端部分和另一端部分,第一引导轴在第三方向上的一端部分和另一端部分由壳体支撑。
[0026]
根据本公开的第十六方面,第十四或第十五方面的显影盒还包括第一弹性构件,第一弹性构件是从第二位置朝向第一位置推动第一凸轮的螺旋弹簧。第一引导轴定位在第一弹性构件的内部。
[0027]
根据本公开的第十七方面,在第十四至第十六方面中任一方面的显影盒中,第一引导轴在第三方向上延伸贯穿第一凸轮。
[0028]
根据本公开的第十八方面,在第一至第十七方面中任一方面的显影盒中,第一凸轮在第一凸轮的第一位置处在第三方向上与显影辊间隔开第一距离;并且第一凸轮在第一
凸轮的第二位置处在第三方向上与显影辊间隔开第二距离,第二距离比第一距离短。
[0029]
根据本公开的第十九方面,在第一至第十八方面中任一方面的显影盒中,第一凸轮定位在壳体在第一方向上的一端部分处的外表面处。
[0030]
根据本公开的第二十方面,在第二至第十九方面中任一方面的显影盒中,鼓盒被构造成容纳在成像设备的主体部分中。主体部分包括驱动轴,驱动轴在第一方向上延伸并且在接收到来自主体部分的驱动力时能够在前进位置和缩回位置之间在第一方向上移动。驱动轴被构造成根据驱动轴在第一方向上朝向前进位置的移动,从壳体在第一方向上的一端部分朝向壳体在第一方向上的另一端部分在第一方向上向第一倾斜表面施加按压力。第一凸轮响应于从驱动轴向第一倾斜表面施加按压力而从第一位置移动到第二位置。
[0031]
根据本公开的第二十一方面,第一至第二十方面中任一方面的显影盒还包括被构造成由用户抓握的把手。把手定位在壳体在第三方向上的另一端部分的外表面处。
[0032]
根据本公开的第二十二方面,第一至第二十一方面中任一方面的显影盒还包括第二凸轮,第二凸轮定位在壳体在第二方向上的一端部分的外表面处。第二凸轮能够在第三方向上相对于壳体和显影辊在第三位置和第四位置之间移动,第四位置在第三方向上距离显影辊比第三位置在第三方向上距离显影辊更近。第二凸轮具有第三倾斜表面。第三倾斜表面与壳体之间在第二方向上的距离随着第三倾斜表面在第三方向上远离显影辊延伸而变化。
[0033]
根据本公开的第二十三方面,在第二十二方面的显影盒中,第一凸轮定位在壳体在第一方向上的一端部分的外表面处。第二凸轮定位在壳体在第一方向上的另一端部分的外表面处。
[0034]
根据本公开的第二十四方面,在第二十二或第二十三方面的显影盒中,第二凸轮根据第一凸轮从第一位置到第二位置的移动而从第三位置移动到第四位置。
[0035]
根据本公开的第二十五方面,在从属于第二方面的第二十二至第二十四方面的显影盒中,在显影盒附接到鼓盒的状态下,第三倾斜表面在第二凸轮的第三位置处与鼓盒的一部分接触;并且第三倾斜表面在第二凸轮的第四位置处与鼓盒的该一部分分离。
[0036]
根据本公开的第二十六方面,在第二十二至第二十五方面的显影盒中,第二凸轮能够根据第二凸轮在第三位置和第四位置之间的移动而与壳体和显影辊一起在第二方向上相对于感光鼓移动。
[0037]
根据本公开的第二十七方面,在第二十二至第二十六方面的显影盒中,第二倾斜表面倾斜成随着在第三方向上远离显影辊延伸而增加第二倾斜表面和壳体之间在第二方向上的距离。第三倾斜表面倾斜成随着在第三方向上远离显影辊延伸而增加第三倾斜表面与壳体之间在第二方向上的距离。
[0038]
根据本公开的第二十八方面,在第二十二至第二十七方面的显影盒中,显影辊在第二凸轮的第三位置处与感光鼓接触;并且显影辊在第二凸轮的第四位置处与感光鼓分离。
[0039]
根据本公开的第二十九方面,在第二十二至第二十八方面的显影盒中,第三倾斜表面相对于第二方向和第三方向倾斜。
[0040]
根据本公开的第三十方面,第二十二至第二十九方面的显影盒还包括连接杆,连接杆在第一方向上延伸并且在第一方向上定位在第一凸轮和第二凸轮之间以将第一凸轮
连接到第二凸轮。
[0041]
根据本公开的第三十一方面,在第三十方面的显影盒中,第一凸轮在第一方向上固定到连接杆的一端部分。
[0042]
[发明的有益效果]
[0043]
根据第一至第三十一方面,可以提供一种显影盒,该显影盒能够通过仅从其一侧传递的驱动力在第二方向上移动显影辊。
[0044]
根据第一方面,在将第一凸轮从第一位置移动到第二位置的过程中按压第二倾斜表面,从而在第二方向上移动显影辊。
[0045]
根据第五方面,施加到第一倾斜表面的按压力被转换为指向第三方向的力。结果,第一凸轮可以在第三方向上在第一位置和第二位置之间移动。
[0046]
根据第六方面,在第一凸轮在第一位置和第二位置之间移动的情况下,使第一凸轮在第三方向上在第一位置和第二位置之间移动的力被转换为作用在第二方向上的力。结果,壳体和显影辊可以在第二方向上移动,从而使显影辊与感光鼓分离。
[0047]
根据第八方面,在第一凸轮通过施加到第一凸轮的第二倾斜表面的按压力从第一位置移动到第二位置之后,第一凸轮能够通过第一弹性构件的推动力返回到第一位置。
[0048]
根据第十一方面,允许第一凸轮根据螺旋弹簧的膨胀和收缩在第一位置和第二位置之间移动。
[0049]
根据第十三方面,由于第一弹性构件的一端部分容纳在第一凸轮的凹部中,所以能够获得比其他方式更大的第一弹性构件的膨胀/收缩冲程。
[0050]
根据第十四方面,允许第一凸轮在第三方向上精确地移动以在第一位置和第二位置之间移动。
[0051]
根据第十六方面,能够抑制第一弹性构件在与第三方向交叉的方向上的挠曲。结果,可以获得第一凸轮的精确操作。
[0052]
根据第十七方面,可以实现第一引导轴和第一凸轮的节省空间的布局。此外,由于第一凸轮的移动由第一引导轴引导,所以第一凸轮可在第三方向上精确地移动。
[0053]
根据第二十方面,显影辊可以通过来自成像设备的主体部分的驱动力与感光鼓分离。
[0054]
根据第二十二方面,在使第二凸轮在第三位置和第四位置之间移动的过程中按压第三倾斜表面。由于第二倾斜表面和第三倾斜表面定位在壳体在第一方向上的相应端部分处,所以能够按压壳体在第一方向上的两个端部分。结果,显影盒能够在第二方向上可靠地移动,而显影盒不会相对于第一方向倾斜。
[0055]
根据第二十九方面,在第二凸轮在第三位置和第四位置之间移动的情况下,使第二凸轮在第三方向上在第三位置和第四位置之间移动的力被转换为作用在第二方向上的力。结果,允许壳体和显影辊在第二方向上移动。
[0056]
根据第三十方面,第一凸轮和第二凸轮能够以彼此互锁的关系移动。因此,在显影盒在第二方向上移动的状态下,可以限制显影盒相对于第一方向的倾斜姿势。
附图说明
[0057]
图1是成像设备的示意图;
[0058]
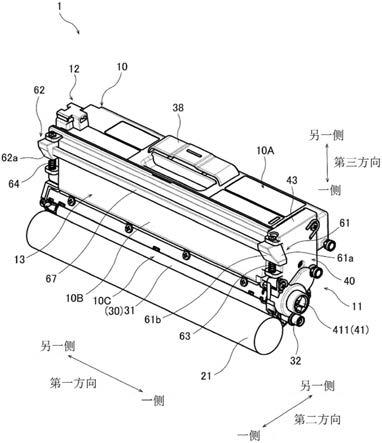
图2是根据一个实施例的显影盒的立体图;
[0059]
图3是示出从其在第三方向上的另一侧观察的附接有显影盒的鼓盒的视图;
[0060]
图4是作为鼓盒的一部分的第一压力接触部分的立体图;
[0061]
图5是作为鼓盒的一部分的第二压力接触部分的立体图;
[0062]
图6是根据实施例的显影盒的分解立体图;
[0063]
图7是示出处于接触状态的根据实施例的显影盒和感光鼓的立体图;
[0064]
图8是从其在第二方向上的一侧观察的处于接触状态的根据实施例的显影盒和感光鼓的视图;
[0065]
图9是从其在第一方向上的一侧观察的处于接触状态的根据实施例的显影盒和感光鼓的视图;
[0066]
图10是处于分离状态的根据实施例的显影盒和感光鼓的立体图;
[0067]
图11是从其在第二方向上的一侧观察的处于分离状态的根据实施例的显影盒和感光鼓的视图;和
[0068]
图12是示出从其在第一方向上的一侧观察的处于分离状态的根据实施例的显影盒和感光鼓的视图。
具体实施方式
[0069]
在下文中,将参考附图描述本公开的一个实施例。
[0070]
在以下描述中,显影辊的旋转轴线(显影辊轴线)延伸的方向将被称为“第一方向”。在显影辊的周边表面上,暴露于壳体外部的部分和容纳在壳体内的部分将被假设为在“第二方向”上并排布置。这里,第一方向和第二方向彼此交叉,优选地彼此正交。此外,与第一和第二方向两者交叉(优选地,与第一和第二方向正交)的方向将被称为“第三方向”。
[0071]
<1.成像设备的整体构造>
[0072]
图1是成像设备100的示意图。成像设备100是电子照相型打印机,例如激光打印机和led打印机。如图1所示,成像设备100包括根据本实施例的四个显影盒1、鼓盒2和主体部分9。
[0073]
<1
‑
1.主体部分的整体构造>
[0074]
以下,将描述主体部分9的整体构造。如图1所示,主体部分9包括主体框架101、转印带(未示出)和控制器102。
[0075]
主体框架101是大致长方体,并且在其中具有内部空间。附接有显影盒1的鼓盒2可以容纳在主体框架101的内部空间中。此外,在主体框架101中,设置了四个充电器(未示出)、四个光源(未示出)、转印带和控制器102。
[0076]
主体框架101是大致长方体,并且在其中限定内部空间。附接有显影盒1的鼓盒2被构造成容纳在主体框架101的内部空间中。在主体框架101中,还定位了四个充电器(未示出)、四个光源(未示出)、转印带和控制器102。
[0077]
转印带是用于传送打印片材的环形带。在附接有显影盒1的鼓盒2定位在主体框架101的内部空间中的状态下,转印带定位成相对于感光鼓21与显影辊30相对。转印带具有可与相应感光鼓21的外周表面接触的外周表面。
[0078]
控制器102包括处理器(诸如cpu)和主体存储器。主体存储器是可读写的存储介
质,如flash rom、eeprom等。主体存储器被构造为存储用于控制在成像设备100中执行的操作的计算机程序。处理器被构造为根据存储在主体存储器中的计算机程序执行各种处理。即,处理器被构造为执行要在成像设备100中执行的各种打印处理和与其相关联的其他处理。
[0079]
<1
‑
2.显影盒的整体构造>
[0080]
接下来将描述每个显影盒1的整体结构。图2是根据实施例的显影盒1的立体图。
[0081]
如图1和图3所示,显影盒1可附接到鼓盒2的框架200并且可从其上拆下。如图2所示,每个显影盒1包括构造成在其中存储显影剂的壳体10。壳体10包括容器部分10a和盖部分10b。容器部分10a在其中限定内部空间。盖部分10b为平板状。盖部分10b定位在壳体10在第二方向上的一端部分处。盖部分10b具有稍后描述的第三外表面13。盖部分10b覆盖定位在容器部分10a在第二方向上的一端部分处的开口部分。容器部分10a具有形成有开口10c的第三方向上的一端部分。显影辊30(稍后描述)定位在开口10c处。
[0082]
壳体10具有第一方向上的一端部分,该一端部分具有第一外表面11。壳体10具有第一方向上的另一端部分,该另一端部分具有第二外表面12。壳体10还具有在第二方向上彼此间隔开的第三外表面13和第四外表面14(图9)。第三外表面13定位在壳体10在第二方向上的一端部分处。第四外表面14定位在壳体10在第二方向上的另一端部分处。
[0083]
四个显影盒1分别在其中容纳不同颜色(例如,青色、品红色、黄色和黑色)的调色剂。然而,四个显影盒1可以在其中容纳相同颜色的调色剂。
[0084]
每个显影盒1包括一个显影辊30。显影辊30的形状为圆柱形。显影辊30可绕在第一方向上延伸的旋转轴线(显影辊轴线)旋转。显影辊30由壳体10支撑以便可绕显影辊轴线旋转。
[0085]
显影辊30包括显影辊本体31和显影辊轴32。显影辊本体31的形状为中空圆柱形并且在第一方向上延伸。显影辊本体31由弹性材料(例如橡胶)制成。显影辊轴32是在第一方向上穿过显影辊本体31的实心圆柱形构件。显影辊轴32由金属或导电树脂制成。显影辊本体31固定到显影辊轴32,其间没有相对旋转。即,显影辊本体31可与显影辊轴32一起绕显影辊轴线旋转。显影辊本体31的外周表面在第二方向上的一部分通过开口10c暴露于壳体10的外部。显影辊本体31的外周表面的第二方向上的剩余部分定位在壳体10的内部。
[0086]
显影辊轴32在第一方向上具有一端部分。显影辊齿轮(未示出)在第一方向上附接到显影辊轴32的一端部分。显影辊齿轮定位在第一外表面11处。显影辊齿轮固定到显影辊轴32的一端部分,其间没有相对旋转。因此,显影辊齿轮的旋转引起显影辊轴32的旋转,从而显影辊本体31可与显影辊轴32一起旋转。
[0087]
顺便提及,显影辊轴32可以不在第一方向上延伸通过显影辊本体31。例如,显影辊轴32可以由分别从显影辊本体31在第一方向上的两端在第一方向上向外延伸的两个轴构成。
[0088]
如图2所示,每个显影盒1还包括齿轮部分40。齿轮部分40定位在壳体10的第一外表面11处。齿轮部分40包括上述显影辊齿轮、联接器41和齿轮盖43。
[0089]
联接器41是旋转构件,其被构造为接收从成像设备100中的动力源供应的驱动力。联接器41可绕在第一方向上延伸的旋转轴线旋转。联接器41具有在第一方向上向内凹入的固定孔411。在显影盒1附接到鼓盒2的情况下将鼓盒2附接到主体部分9上时,主体部分9的
传动轴(未示出)被构造成插入固定孔411中。传动轴和联接器41因此彼此连接而其间没有相对旋转。因此,传动轴的旋转引起联接器41的旋转。根据联接器41的旋转,显影辊齿轮与显影辊30一起旋转。联接器41的旋转还引起供应辊(未示出)和搅拌器(未示出)的旋转。
[0090]
用于被用户抓握的把手38定位在壳体10在第三方向上的另一侧的另一端部分的外表面处。
[0091]
<1
‑
3.鼓盒的整体构造>
[0092]
接下来,将描述鼓盒2的整体构造。图3是从其在第三方向上的另一侧观察的附接有显影盒1的鼓盒2的视图。如图1和3所示,鼓盒2包括四个感光鼓21和框架200。
[0093]
图1所示的四个感光鼓21中的每一个都具有以鼓轴线为中心的圆柱形外周表面,鼓轴线是在第一方向上延伸的旋转轴线。外周表面是涂有感光材料的表面。四个感光鼓21中的每一个都可绕鼓轴线旋转。
[0094]
框架200是支撑四个感光鼓21的框架。框架200保持四个感光鼓21,使得感光鼓21在第二方向上彼此间隔开。框架200包括在第一方向上彼此相对的一对侧框架201、202。侧框架202在第一方向上定位成比侧框架201更朝向另一侧。感光鼓21由侧框架201和202可旋转地支撑。
[0095]
为了在成像设备100中执行打印处理,控制器102驱动马达(未示出),使得感光鼓21和显影辊30可以由通过传动轴和联接器41从马达传递的驱动力旋转。此外,控制器102向充电器(未示出)供电以对各个感光鼓21的外周表面充电。控制器102还使光源(未示出)将光发射到各个感光鼓21的外周表面上。以此方式,对应于打印图像的静电潜像形成在每个感光鼓21的外周表面上。然后将容纳在每个显影盒1中的调色剂通过对应显影辊30供应给形成在对应感光鼓21上的静电潜像。因此,静电潜像在每个感光鼓21的外周表面上变成可见调色剂图像。
[0096]
然后,打印片材在每个感光鼓21和转印带之间传送,由此调色剂图像从每个感光鼓21的外周表面转印到打印片材上。带有调色剂图像的打印片材然后被传送到定影单元(未示出),在定影单元中调色剂图像被热定影到打印片材上。以这种方式在打印片材上执行图像打印。
[0097]
在成像设备100中,例如,为了改变打印颜色或在待机期间,显影辊30与对应感光鼓21分离可能是优选的。为此,本实施例的成像设备100提供接触状态和分离状态。接触状态表示在显影盒1附接到鼓盒2的状态下显影辊30和感光鼓21彼此接触的状态。分离状态表示在显影盒1附接到鼓盒2的状态下显影辊30和感光鼓21彼此分离的状态。
[0098]
为此,作为实现接触和分离的部件,每个显影盒1包括第一凸轮61、第二凸轮62、第一弹性构件63、第二弹性构件64、第一引导轴65、第二引导轴66和连接杆67。此外,作为实现接触和分离的部件,鼓盒2包括第一压力接触部分26和第二压力接触部分27。作为实现接触和分离的部件,主体部分9包括四个驱动轴103。
[0099]
<2.用于接触和分离的鼓盒中的部件>
[0100]
在下文中,将参考图3至图5描述用于在显影辊30和感光鼓21之间进行接触和分离的鼓盒2的部件。图4是第一压力接触部分26的放大立体图。图5是第二压力接触部分27的放大立体图。
[0101]
如图3所示,在显影盒1附接到鼓盒2的状态下,每个显影盒1的第一外表面11在第
一方向上面向第一侧框架201的内表面。而且,在显影盒1附接到鼓盒2的状态下,每个显影盒1的第二外表面12在第一方向上面向第二侧框架202的内表面。
[0102]
如图3的放大图所示,第一侧框架201包括四个第一压力接触部分26。即,每个第一压力接触部分26定位在框架200在第一方向上的一端部分处。如图4所示,每个第一压力接触部分26具有第一压力接触表面260,该第一压力接触表面260是相对于第二和第三方向倾斜的平坦表面。
[0103]
如图3的另一放大图所示,第二侧框架202包括四个第二压力接触部分27。即,每个第二压力接触部分27定位在框架200在第一方向上的另一侧的另一端部分处。如图5所示,每个第二压力接触部分27具有第二压力接触表面270,该第二压力接触表面270是相对于第二和第三方向倾斜的平坦表面。
[0104]
第一压力接触部分26和对应的第二压力接触部分27定位成在第一方向上彼此间隔开。如稍后所述,每个显影盒1的第一凸轮61可与对应第一压力接触部分26的第一压力接触表面260接触,并且每个显影盒1的第二凸轮62可与对应第二压力接触部分270的第二压力接触表面270接触。
[0105]
<3.用于接触和分离的主体部分中的部件>
[0106]
接下来,将描述用于实现显影辊30和感光鼓21之间的接触和分离的主体部分9的部件。
[0107]
主体部分9包括四个驱动轴103(见图9和12),作为用于执行接触和分离的部件。每个驱动轴103是在第一方向上延伸的实心圆柱体或实心棱柱。驱动轴103可在接收到来自主体部分9的动力源的驱动力时在前进位置和缩回位置之间在第一方向上移动。
[0108]
<4.用于接触和分离的显影盒中的部件>
[0109]
接下来,将参考图2和图6描述用于实现显影辊30和对应感光鼓21之间的接触和分离的每个显影盒1的部件。图6是显影盒1的分解立体图。
[0110]
作为用于接触和分离的部件,显影盒1包括第一凸轮61、第二凸轮62、第一弹性构件63、第二弹性构件64、第一引导轴65、第二引导轴66和连接杆67。
[0111]
如图2和图6所示,第一凸轮61定位在壳体10的第一外表面11处。此外,第一凸轮61定位在壳体10的第三外表面13处。第一凸轮61具有第一倾斜表面61a、第二倾斜表面61b、第一表面61e(见图6、9)、第二表面61d、第一通孔61c和第一凹部61f(见图9)。如稍后详细描述的,第一凸轮61可在第一位置(图9)和第二位置(图12)之间相对于壳体10和显影辊30在第三方向上移动。第二位置在第三方向上距离显影辊30比第一位置距离显影辊30更近。
[0112]
第一倾斜表面61a是相对于第一方向和第三方向倾斜的平坦表面。第一倾斜表面61a平行于第二方向。具体地,第一倾斜表面61a倾斜成随着在第三方向上朝向显影辊30延伸而在第一方向上远离第一外表面11。
[0113]
第二倾斜表面61b是相对于第二方向和第三方向倾斜的平坦表面。第二倾斜表面61b平行于第一方向。具体地,第二倾斜表面61b倾斜成随着在第三方向上接近显影辊30,在第二方向上朝向第三外表面13延伸。即,随着第二倾斜表面61b在第三方向上远离显影辊30延伸,第二倾斜表面61b和壳体10之间在第二方向上的距离增加。
[0114]
第一倾斜表面61a和第二倾斜表面61b是第一凸轮61的不同表面。当从其在第一方向上的一侧观察时,第一倾斜表面61a的形状大致呈梯形。梯形形状在其在第三方向上的一
侧具有短边,而在其在第三方向上的另一侧具有长边。当从其在第二方向上的一侧观察时,第二倾斜表面61b的形状大致呈梯形。梯形形状在第三方向上的一侧具有长边,而在第三方向上的另一侧具有短边。第一倾斜表面61a在第二方向上的一侧具有斜边,该斜边连接到第二倾斜表面61b在第一方向上的一侧的斜边。
[0115]
第一凸轮61还具有第一表面61e和第二表面61d。第一表面61e和第二表面61d垂直于第三方向。第一表面61e位于第一凸轮61在第三方向上的一侧的一端部分处。第二表面61d位于第一凸轮61在第三方向上的另一侧的另一端部分处。
[0116]
第一通孔61c在第三方向上延伸贯穿第一凸轮61。第一通孔61c具有圆形横截面。第一通孔61c在第三方向上的另一侧具有端部,该端部在第一凸轮61的第二表面61d处开口。
[0117]
第一凹部61f在第一表面61e处在第三方向上朝向另一侧(朝向第二表面61d)凹入。第一凹部61f的横截面面积大于第一通孔61c的横截面面积。第一通孔61c在第三方向上(在一侧)具有连接到第一凹部61f的内部空间的一端。
[0118]
第一弹性构件63是在第三方向上延伸的螺旋弹簧。第一弹性构件63可在第三方向上膨胀和收缩。第一弹性构件63具有位于第一凹部61f(见图9)的底部的一端部分。即,第一弹性构件63的一端部分容纳在第一凹部61f的内部空间中。第一弹性构件63具有连接到第一座构件43a(见图9)的另一端部分。第一座构件43a从定位在其在第二方向上的一侧的齿轮盖43的侧壁朝向第二方向上的一侧(向外)突出。第一座构件43a具有垂直于第三方向的第一平坦表面。第一弹性构件63的另一端部分位于第一座构件43a的第一平坦表面上。第一弹性构件63介于第一凹部61f的底部与第一座构件43a的第一平坦表面之间,使得第一弹性构件63在第三方向上被压缩以具有比其自然长度更小的长度。
[0119]
第一引导轴65在第三方向上延伸,并且具有实心圆柱形状或实心棱柱形状。第一引导轴65定位在壳体10的第三外表面13处。第一引导轴65定位在第一弹性构件63内。第一引导轴65具有连接到第一座构件43a的第一平坦表面的一端。第一引导轴65插入第一通孔61c中。因此,第一引导轴65在第三方向上延伸贯穿第一凸轮61。
[0120]
第一引导轴65具有连接到第二座构件43b的第三方向上的另一端(见图6)。第二座构件43b从定位在其在第二方向上的一侧的齿轮盖43的侧壁朝向第二方向上的一侧(向外)突出。第二座构件43b在第三方向上定位成比第一座构件43a更朝向另一侧。第二座构件43b具有垂直于第三方向的第二平坦表面。第一引导轴65在第三方向上的另一端位于第二座构件43b的第二平坦表面上。
[0121]
第一引导轴65的一端通过公知构造的紧固件(例如螺钉和销)固定到第一座构件43a的第一平坦表面。第一引导轴65的另一端通过公知构造的紧固件(例如螺钉和销)固定到第二座构件43b的第二平坦表面。即,第一引导轴65在第三方向上的每一端通过齿轮盖43由壳体10支撑。第一凸轮61可沿第一引导轴65在第三方向上移动。第一弹性构件63在第三方向上朝向另一侧(在壳体10的第三方向上从一端部分朝向另一端部分)推动第一凸轮61。因此,第一凸轮61被第一弹性构件63的推动力从第二位置(图12)朝向第一位置(图9)推动。
[0122]
如图2和图6所示,第二凸轮62定位在壳体10的第一外表面11处。此外,第二凸轮62定位在壳体10的第三外表面13处。第二凸轮62具有第三倾斜表面62a、第三表面62d、第四表面62b、第二通孔62c和第二凹部(未图示)。如稍后详细描述的,第二凸轮62可在第三位置
(图8)和第四位置(图11)之间相对于壳体10和显影辊30在第三方向上移动。第四位置在第三方向上距离显影辊30比第三位置距离显影辊30更近。根据第一凸轮61从第一位置到第二位置的移动,第二凸轮62可从第三位置移动到第四位置。
[0123]
第三倾斜表面62a是相对于第二方向和第三方向倾斜的平坦表面。第三倾斜表面62a平行于第一方向。具体地,第三倾斜表面62a倾斜成随着在第三方向上接近显影辊30而在第二方向上朝向第三外表面13延伸。即,随着第三倾斜表面62a在第三方向上远离显影辊30延伸,第三倾斜表面62a和壳体10之间在第二方向上的距离增加。
[0124]
第三倾斜表面62a在第二方向上从一侧朝向另一侧观察时形状大致呈梯形。梯形形状在第三方向上的一侧具有长边,而在第三方向上的另一侧具有短边。第二凸轮62具有第三表面62d和第四表面62b。第三表面62d和第四表面62b垂直于第三方向。第三表面62d在第二凸轮62在第三方向上的一端处。在第二凸轮62中,第四表面62b在第三方向上定位成比第二凸轮62更朝向另一侧。
[0125]
第二通孔62c在第三方向延伸贯穿第二凸轮62。第二通孔62c具有圆形横截面。第二通孔62c在第三方向上的另一侧具有端部,该端部在第二凸轮62的第四表面62b处开口。
[0126]
第二凹部(未示出)在第三表面62d处在第三方向上朝向另一侧(朝向第四表面62b)凹入。第二凹部的横截面面积大于第二通孔62c的横截面面积。第二通孔62c在第三方向上的一侧具有连接到第二凹部的内部空间的一端。
[0127]
第二弹性构件64是在第三方向上延伸的螺旋弹簧。第二弹性构件64可在第三方向上膨胀和收缩。第二弹性构件64具有位于第二凹部的底部的一端部分。即,第二弹性构件64的一端部分容纳在第二凹部的内部空间中。第二弹性构件64具有连接到第三座构件10d(图6)的另一端部分。第三座构件10d从壳体10的第三外表面13朝向第三方向上的一侧(向外)突出。第三座构件10d具有垂直于第三方向的第三平坦表面。第二弹性构件64在第三方向上的另一端部分位于第三座构件10d的第三平坦表面上。第二弹性构件64介于第二凹部的底部与第三座构件10d的第三平坦表面之间,使得第二弹性构件64在第三方向上被压缩以具有比其自然长度更小的长度。
[0128]
第二引导轴66在第三方向上延伸,并且具有实心圆柱形状或实心棱柱形状。第二引导轴66定位在壳体10的第三外表面13处。第二引导轴66定位在第二弹性构件64的内部。第二引导轴66具有连接到第三座构件10d的第三平坦表面的一端。第二引导轴66插入第二通孔62c中。因此,第二引导轴66在第三方向上延伸贯穿第二凸轮62。
[0129]
第二凸轮62具有连接到第四座构件10e(图6)的另一端。第四座构件10e从壳体10的第三外表面13朝向第二方向上的一侧突出。第四座构件10e在第三方向上定位成比第三座构件10d更朝向另一侧。第四座构件10e具有垂直于第三方向的第四平坦表面。第二引导轴66在第三方向上的另一端位于第四座构件10e的第四平坦表面上。
[0130]
第二引导轴66的一端通过公知构造的紧固件(例如螺钉和销)固定到第三座构件10d的第三平坦表面。第二引导轴66的另一端通过公知构造的紧固件(例如螺钉和销)固定到第四座构件10e的第四平坦表面。因此,第二引导轴66在第三方向上的每一端都由壳体10支撑。第二凸轮62可沿第二引导轴66在第三方向上移动。第二弹性构件64在第三方向上朝向另一侧(从壳体10在第三方向上的一端部分到另一端部分)推动第二凸轮62。因此,第二凸轮62被第二弹性构件64的推动力从第四位置朝向第三位置推动。
[0131]
连接杆67在第一方向上延伸并且具有实心棱柱形状或实心圆柱形状。连接杆67在第一方向上定位在第一凸轮61和第二凸轮62之间。连接杆67将第一凸轮61连接到第二凸轮62。具体地,第一凸轮61连接到连接杆67在第一方向上的一侧的一端部分。第二凸轮62连接到连接杆67在第一方向上的另一侧的另一端部分。因此,第二凸轮62可与第一凸轮61互锁地在第三方向上移动。
[0132]
<5.在接触和分离之间切换时每个部件的移动>
[0133]
在下文中,将参考图7至图12描述每个部件如何操作以实现接触和分离之间的切换。
[0134]
图7是示出处于接触状态的显影盒1和感光鼓21的立体图。图8是从其在第二方向上的一侧观察的处于接触状态的显影盒1和感光鼓21的视图。图9是从其在第一方向上的一侧观察的处于接触状态的显影盒1和感光鼓21的视图。图10是处于分离状态的显影盒1和感光鼓21的立体图。图11是从其在第二方向上的一侧观察的处于分离状态的显影盒1和感光鼓21的视图。图12是示出从其在第一方向上的一侧观察的处于分离状态的显影盒1和感光鼓21的视图。
[0135]
在成像设备100中,在驱动轴103被朝向第一方向上的另一侧驱动或移动到前进位置的情况下,对应第一凸轮61的第一倾斜表面61a被驱动轴103按压。即,第一凸轮61的第一倾斜表面61a接收在第一方向上从壳体10的一端部分朝向另一端部分的按压力f。
[0136]
通过驱动轴103与第一倾斜表面61a的接触,从驱动轴103施加到第一倾斜表面61a的按压力f被转换为指向第三方向的力。因此,第一凸轮61被朝向第三方向上的一侧按压。由于将第一凸轮61朝向第三方向上的一侧按压的按压力f大于第一弹性构件63的推动力,因此使处于第一位置的第一凸轮61在第三方向上朝向一侧移动以处于第二位置。
[0137]
同时,第二倾斜表面61b与第一压力接触部分26的第一压力接触表面260接触。根据第一凸轮61的移动,第二倾斜表面61b与第一压力接触表面260之间的接触位置在第二倾斜表面61b上从靠近第一表面61e的位置移动到靠近第二表面61d的位置。结果,第一压力接触部分26的第一压力接触表面260与壳体10之间在第二方向上的距离逐渐增大。由于第二倾斜表面61b被第一压力接触部分26的第一压力接触表面260按压,所以壳体10和显影辊30与第一凸轮61一起在第二方向上移动,以使显影辊30与对应感光鼓21分离。
[0138]
根据另一方面,由于第二倾斜表面61b与第一压力接触部分26的第一压力接触表面260之间的接触,将使第一凸轮61朝向第三方向上的一侧移动的力转换为在第二方向上朝向另一侧按压第一凸轮61的力。结果,壳体10和显影辊30与第一凸轮61一起在第二方向上朝向另一侧移动,从而使显影辊30与感光鼓21分离。
[0139]
此后,在驱动轴103在第一方向上朝向一侧(从壳体10在第一方向上的另一端部分到一端部分)缩回的情况下,第一凸轮61通过第一弹性构件63的推动力朝向第三方向上的另一侧移动。因此,第一凸轮61从第二位置移动到第一位置。
[0140]
此处,鼓盒2的框架200包括用于将每个显影盒1的壳体10朝向对应感光鼓21按压的压力机构(未示出)。由于压力机构在该状态下在第二方向上朝向一侧移动显影盒1,因此恢复了显影辊30和对应感光鼓21之间的接触状态。这样,成像设备100的状态可在接触状态(图7至图9)和分离状态(图10至图12)之间切换。
[0141]
根据第一凸轮61在第一位置和第二位置之间的移动,第二凸轮62也通过连接杆67
在第三位置和第四位置之间移动。通过第二凸轮62的移动,第三倾斜表面62a被第二压力接触部分27的第二压力接触表面270按压,使得壳体10和显影辊30与第二凸轮62一起在第二方向上移动。这样,壳体10在第一方向上的两个端部分分别被作为鼓盒2的部件的第一压力接触部分26和第二压力接触部分27按压,以在第二方向上朝向另一侧移动壳体10。因此,该结构能够降低在接触状态和分离状态之间切换时壳体10可能相对于第一方向倾斜的可能性。
[0142]
顺便说一下,如图9所示,在显影盒1附接到鼓盒2并且第一凸轮61处于第一位置的状态下,第二倾斜表面61b与作为鼓盒2的一部分的第一压力接触部分26的第一压力接触表面260接触。另一方面,如图12所示,在显影盒1附接到鼓盒2并且第一凸轮61处于第二位置的状态下,第二倾斜表面61b与第一压力接触部分26的第一压力接触表面260分离。根据第一凸轮61从第一位置到第二位置的移动,第二倾斜表面61b逐渐被第一压力接触表面260在第二方向上朝向另一侧按压。第一凸轮61因此与壳体10和显影辊30一起移动,以在第二方向上与对应感光鼓21分离。
[0143]
如图7和图9所示,当第一凸轮61处于第一位置时,显影辊30与对应感光鼓21接触。此时,第一弹性构件63在第三方向上具有第一长度l1;并且第一凸轮61和显影辊30在第三方向上限定它们之间的第一距离d1。
[0144]
如图10和12所示,当第一凸轮61处于第二位置时,显影辊30与感光鼓21分离。此时,第一弹性构件63在第三方向上的第二长度l2小于第一长度l1;并且第一凸轮61和显影辊30在第三方向上限定它们之间的小于第一距离d1的第二距离d2。
[0145]
类似地,在显影盒1附接到鼓盒2并且第二凸轮62处于第三位置的状态下,第三倾斜表面62a与作为鼓盒2的一部分的第二压力接触部分27的第二压力接触表面270接触。此时,显影辊30与对应感光鼓21接触。另一方面,在显影盒1附接到鼓盒2并且第二凸轮62位于第四位置的状态下,第三倾斜表面62a与第二压力接触部分27的第二压力接触表面270分离。此时,显影辊30与感光鼓21分离。
[0146]
<6.总结>
[0147]
如上所述,根据实施例的显影盒1包括壳体10、显影辊30和第一凸轮61。第一凸轮61具有第一倾斜表面61a和第二倾斜表面61b。在显影盒1中,第一凸轮61响应于向第一倾斜表面61a施加按压力f而在第一位置和第二位置之间移动。在第一凸轮61在第一位置和第二位置之间移动期间,第二倾斜表面61b被作为鼓盒2的一部分的第一压力接触表面260按压。因此,显影辊30可以与对应感光鼓21分离。
[0148]
如此,在根据实施例的显影盒1中,显影辊30与对应感光鼓21的分离可以通过仅施加到显影盒1的第一方向上的一侧的驱动力来进行。不需要向显影盒1的第一方向上的两侧施加驱动力。
[0149]
此外,在根据实施例的显影盒1中,第一倾斜表面61a相对于第一方向倾斜。通过第一倾斜表面61a的倾斜,施加到第一倾斜表面61a的按压力f被转换为指向第三方向的力。结果,第一凸轮61可以在第三方向上在第一位置和第二位置之间移动。
[0150]
此外,在根据实施例的显影盒1中,第二倾斜表面61b相对于第二方向和第三方向倾斜。因此,用于将第一凸轮61从第一位置移动到第二位置的按压力f被转换成作为鼓盒2的一部分的第一压力接触表面260的按压力,用于在第二方向上移动第二倾斜表面61b。结
果,壳体10和显影辊30可以在第二方向上移动,从而使显影辊30与对应感光鼓21分离。
[0151]
此外,根据该实施例的显影盒1包括第一弹性构件63。因此,在第一凸轮61通过从作为鼓盒2的一部分的第一压力接触表面260施加到第一凸轮61的第二倾斜表面61b的按压力f从第一位置移动到第二位置之后,第一凸轮61可以通过第一弹性构件63的推动力返回到第一位置。此外,第二倾斜表面61b可以容易地沿着第一压力接触表面260移动。
[0152]
此外,在根据实施例的显影盒1中,第一弹性构件63是螺旋弹簧。根据螺旋弹簧的膨胀和收缩,允许第一凸轮61在第一位置和第二位置之间移动。
[0153]
此外,在根据实施例的显影盒1中,第一凸轮61具有第一凹部61f。第一弹性构件63的一端部分定位在第一凹部61f的底部分处。由于第一弹性构件63的一端部分容纳在第一凹部61f中,所以可以获得比其他方式更大的第一弹性构件63的膨胀/收缩冲程。
[0154]
此外,根据该实施例的显影盒1包括第一引导轴65。第一凸轮61可沿第一引导轴65在第三方向上移动。因此,可以高精度地实现第一凸轮61在第三方向上在第一位置和第二位置之间的移动。
[0155]
此外,在根据该实施例的显影盒1中,第一引导轴65定位在第一弹性构件63的内部。因此,能够抑制第一弹性构件63在与第三方向交叉的方向上的挠曲。结果,可以获得第一凸轮61的精确操作。
[0156]
此外,在根据实施例的显影盒1中,第一引导轴65在第三方向上延伸贯穿第一凸轮61。因此,能够实现第一引导轴65和第一凸轮61的节省空间的布局。此外,因为第一凸轮61的移动由第一引导轴65引导,所以第一凸轮61可以在第三方向上高精度地移动。
[0157]
此外,可容纳鼓盒2的主体部分9包括驱动轴103。第一凸轮61根据从对应驱动轴103向第一倾斜表面61a施加按压力f而从第一位置移动到第二位置。因此,显影辊30可以通过从主体部分9施加的驱动力与感光鼓21分离。
[0158]
此外,根据该实施例的显影盒1包括第二凸轮62。第二凸轮62具有第三倾斜表面62a。在第三倾斜表面62a在第三位置和第四位置之间移动期间,第三倾斜表面62a被作为鼓盒2的一部分的第二压力接触表面270按压。由于第二倾斜表面61b和第三倾斜表面62a分别定位在壳体10在第一方向上的一端部分和另一端部分处,所以壳体10的第一方向上的一端部分和另一端部分可以分别被作为鼓盒2的部分的第一压力接触表面260和第二压力接触表面270按压。结果,显影辊30可以与对应感光鼓21可靠地分离。
[0159]
此外,在根据实施例的显影盒1中,第三倾斜表面62a相对于第二方向和第三方向倾斜。因此,用于将第二凸轮62从第三位置移动到第四位置的力被转换为从第二压力接触表面270(鼓盒2的部分)施加的力,用于在第二方向上移动第三倾斜表面62a。结果,壳体10和显影辊30可以在第二方向上移动,从而使显影辊30与对应感光鼓21分离。
[0160]
此外,根据实施例的显影盒1包括用于将第一凸轮61和第二凸轮62连接在一起的连接杆67。因此,可以实现第一凸轮61和第二凸轮62的互锁移动。因此,在显影盒1与对应感光鼓21分离的状态下,可以限制显影盒1相对于第一方向的倾斜姿势。
[0161]
<7.修改>
[0162]
虽然已经参考上述实施例进行了详细描述,但是对于本领域技术人员来说显而易见的是,在不脱离本公开的范围的情况下可以对其进行许多修改和变化。
[0163]
例如,在上述实施例中,第一引导轴65插入第一凸轮61的第一通孔61c中。替代地,
第一凸轮可以具有在第三方向上延伸贯穿其长度的凹槽,并且第一引导轴可以插入该凹槽中。
[0164]
在上述实施例中,压力接触部分26和27分别具有压力接触表面260、270,压力接触表面260、270具有倾斜的平坦表面。替代地,压力接触部分可以是可绕在第一方向上延伸的旋转轴线旋转的圆柱形构件。
[0165]
在上述实施例中,第一弹性构件63和第二弹性构件64是压缩螺旋弹簧。替代地,第一弹性构件和第二弹性构件可以是张紧螺旋弹簧。在后一种情况下,第一弹性构件的一端部分可以连接到第一凸轮61的第二表面61d,并且第一弹性构件的另一端部分可以连接到第二座构件43b的第二平坦表面。此外,第二弹性构件的一端部分可以连接到第二凸轮62的第四表面62b,并且第二弹性构件的另一端部分可以连接到第四座构件10e的第四平坦表面。
[0166]
在上述实施例中,当第一凸轮61在第一位置时,显影辊30与感光鼓21接触,而当第一凸轮61在第二位置时,显影辊30与感光鼓21分离。替代地,当第一凸轮61在第二位置时,显影辊30可与感光鼓21接触,而当第一凸轮61在第一位置时,显影辊30可与感光鼓21分离。在后一种情况下,第一凸轮的第二倾斜表面61b和第二凸轮62的第三倾斜表面62a可以倾斜成当在第三方向上远离显影辊30延伸时在第二方向上接近壳体10。
[0167]
注意,显影盒1的详细构造可以不同于上述和附图中所示的构造。进一步,在不产生技术冲突的情况下,上述实施例和变型中的每个部件可以适当地组合在一起。
[0168]
[参考标记列表]
[0169]
1:显影盒
[0170]
2:鼓盒
[0171]
9:主体部分
[0172]
10:壳体
[0173]
10a:容器部分
[0174]
10b:盖部分
[0175]
10c:开口
[0176]
10d:第三座构件
[0177]
10e:第三座构件
[0178]
11:第一外表面
[0179]
12:第二外表面
[0180]
13:第三外表面
[0181]
14:第四外表面
[0182]
21:感光鼓
[0183]
26:第一压力接触部分
[0184]
25:第二压力接触部分
[0185]
30:显影辊
[0186]
31:显影辊本体
[0187]
32:显影辊轴
[0188]
38:把手
[0189]
40:齿轮部分
[0190]
41:联接器
[0191]
43:齿轮盖
[0192]
43a:第一座构件
[0193]
43b:第二座构件
[0194]
61:第一凸轮
[0195]
61a:第一倾斜表面
[0196]
61b:第二倾斜表面
[0197]
61c:第一通孔
[0198]
61d:第二表面
[0199]
62:第二凸轮
[0200]
62a:第三倾斜表面
[0201]
62b:第四表面
[0202]
62c:第二通孔
[0203]
63:第一弹性构件
[0204]
64:第二弹性构件
[0205]
65:第一引导轴
[0206]
66:第二引导轴
[0207]
67:连接杆
[0208]
100:成像设备
[0209]
101:主体框架
[0210]
102:控制器
[0211]
103:驱动轴
[0212]
200:框架
[0213]
201:侧框架
[0214]
202:侧框架
[0215]
260:第一压力接触表面
[0216]
270:第二压力接触表面
[0217]
411:固定孔
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1