无对称自由曲面光学系统的制作方法
1.本发明属于光学技术领域,尤其涉及一种自由曲面光学系统。
背景技术:
2.同轴光学系统和离轴子午对称光学系统是目前光学技术领域的主要设计对象,现在已经有成熟的产品及设计方法。上述同轴光学系统和离轴子午对称光学系统能够满足成像领域大多数的需求,然而对于某些空间有限或者空间形状存在限制的场合,无法给同轴光学系统分配足够的空间。此外,同轴反射系统还存在着中心遮拦以及可用的、像质优良的中心视场较小等缺陷。解决上述两个缺陷的常用办法是采用离轴系统。更进一步地,假如留给光学系统的空间不仅有限,而且其形状也不是对称的,目前常见的同轴光学系统和离轴子午对称光学系统均难以装入。
3.因此,提高光学系统的设计自由度、充分利用有限的物理空间是目前光学技术领域亟需解决的问题。
技术实现要素:
4.有鉴于此,确有必要提供一种具有更高设计自由度、能够充分利用有限的物理空间的自由曲面光学系统。
5.一种无对称自由曲面光学系统,包括:主反射镜、次反射镜、第三反射镜和一像面,从物出发的光线在所述主反射镜上发生反射形成第一反射光束,该第一反射光束照射到所述次反射镜上并发生反射形成第二反射光束,该第二反射光束照射到所述第三反射镜上并发生反射形成第三反射光束,该第三反射光束到达所述像面成像;所述无对称自由曲面光学系统没有旋转对称性,也没有子午对称性。
6.一种无对称自由曲面光学系统,包括:主反射镜、次反射镜以及第三反射镜,从物出发的光线在所述主反射镜上发生反射形成第一反射光束,该第一反射光束照射到所述次反射镜上并发生反射形成第二反射光束,该第二反射光束照射到所述第三反射镜上并发生反射形成第三反射光束,该第三反射光束到达像面成像;所述无对称自由曲面光学系统没有旋转对称性,也没有子午对称性,所述像面具有45
°
的β倾斜,所述光线在所述无对称自由曲面光学系统内被三维的折转;所述无对称自由曲面光学系统的三维空间的尺寸分别为200mm、180mm、180mm,视场角为8
°×6°
,f数为1.3,有效焦距为50mm,入瞳直径为38.5mm,工作波长为8μm-14μm。
7.与现有技术相比较,本发明实施例提供的无对称自由曲面光学系统中曲面的空间位置约束更少,无对称自由曲面光学系统内的光线被三维的折转,与仅利用两维光路折叠的子午对称离轴光学系统相比更加紧凑,可以被装入更小的或是具体特殊结构(如非子午对称)的物理空间。
附图说明
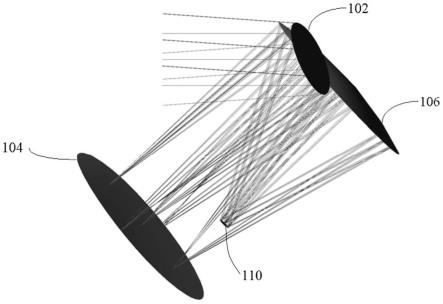
8.图1为本发明第一实施例提供的无对称自由曲面光学系统三维结构及光路示意图。
9.图2为本发明第一实施例提供的无对称自由曲面光学系统的yz视图。
10.图3为本发明第一实施例提供的无对称自由曲面光学系统的xz视图。
11.图4为本发明第二实施例提供的无对称自由曲面光学系统的设计方法流程图。
12.图5为本发明第二实施例建立的子午对称离轴三反系统的yz视图。
13.图6为本发明第二实施例建立的初始平面系统的yz视图。
14.图7为本发明第二实施例建立的初始平面系统的xz视图。
15.图8为本发明第二实施例建立的初始平面系统的三维结构及光路示意图。
16.图9为本发明第二实施例定义特征光线时的视场选择示意图。
17.图10为本发明第二实施例中全局坐标与局部坐标的转换示意图。
18.图11为本发明第二实施例经迭代后的光学系统结构及光路示意图。
19.图12为本发明第二实施例经迭代后的光学系统畸变网络图。
20.图13为本发明第二实施例经优化后的光学系统的衍射传递函数。
21.图14为本发明第二实施例经优化后的光学系统的视场rms波像差图。
22.图15为本发明第二实施例经优化后的光学系统的畸变网络图。
23.主要元件符号说明
[0024][0025]
具体实施方式
[0026]
以下将结合附图及具体实施例,对本发明提供的无对称自由曲面光学系统作进一步详细说明。
[0027]
本发明第一实施例提供一种无对称自由曲面光学系统。所述无对称自由曲面光学系统是指既没有旋转对称性也没有子午对称性的光学系统。
[0028]
请参见图1~图3,本实施例提供的无对称自由曲面光学系统100具体包括:主反射镜102、次反射镜104以及第三反射镜106。从物出发的光线在所述主反射镜102上发生反射形成第一反射光束,该第一反射光束照射到所述次反射镜104上并发生反射形成第二反射光束,该第二反射光束照射到所述第三反射镜106上并发生反射形成第三反射光束,该第三反射光束到达像面110成像。
[0029]
所述无对称自由曲面光学系统100没有旋转对称性,即主反射镜102、次反射镜104以及第三反射镜106的镜面均不存在旋转对称轴。并且,所述无对称自由曲面光学系统100
也没有子午对称性,即主反射镜102、次反射镜104以及第三反射镜106的镜面均不存在子午对称面。
[0030]
图2和3中,无对称自由曲面光学系统100的yz视图和xz视图的比例尺是相同的。在相同的比例尺下,可以看出该无对称自由曲面光学系统100在xyz三个方向的尺寸接近,分别为200mm、180mm、180mm,不同于传统离轴三反系统存在一个方向的尺寸明显更大。由图1可以看出,无对称自由曲面光学系统内的光线被三维的折转,与仅利用两维光路折叠的子午对称离轴光学系统相比更加紧凑。此外,无对称自由曲面光学系统的结构是像面具有45
°
的β倾斜的新型离轴三反结构,其像面与第二反射镜的中心在x和y方向上都具有一定距离,并且两种的倾斜角度也有差距,这对于探测器的安装是有利的,具有工程应用价值。所述无对称自由曲面光学系统100的具体参数见表1。
[0031]
表1无对称自由曲面光学系统100的参数
[0032][0033][0034]
传统的具有对称性的离轴光学系统像面法线方向位于子午面内,而本实施例所提供的无对称自由曲面光学系统100的像面的法线方向位于子午面外,并且像面具有45
°
的β倾斜。该无对称自由曲面光学系统100不仅在子午面内存在离轴,弧矢面内也是离轴的,这样系统内的光线可以被三维地折转。此外,该无对称自由曲面光学系统100还具有1.3的小f数(f-number)以及相对大的视场角。
[0035]
相较于现有的对称光学系统,本发明实施例提供的无对称自由曲面光学系统中曲面的空间位置约束更少,这让设计出具有特殊空间结构的光学系统成为可能。无对称自由曲面光学系统内的光线被三维的折转,与仅利用两维光路折叠的子午对称离轴光学系统相比更加紧凑,可以被装入更小的或是具体特殊结构(如非子午对称)的物理空间。
[0036]
本发明第一实施例所提供的无对称自由曲面光学系统可以利用一种自由曲面的逐点直接设计方法来实现。
[0037]
本发明第二实施例提供一种无对称自由曲面光学系统的设计方法,具体包括以下步骤:
[0038]
s10,建立一个初始平面系统,该初始平面系统与预期系统结构一致,但没有光焦度,该初始平面系统的像面倾斜角为θ;
[0039]
s20,利用逐点法计算用于构建自由曲面的数据点的坐标和法向量,并进行迭代获得迭代后的光学系统;以及
[0040]
s30,对迭代后的光学系统进行优化。
[0041]
为了便于说明,本实施例中以表2参数为例,设计无对称自由曲面光学系统。
[0042]
表2待设计的无对称自由曲面光学系统的参数
[0043][0044][0045]
步骤s10中,初始平面系统的结构与构建后的优化起点在结构上具有一致性。建立一个与预期系统结构一致的,但没有光焦度的初始平面系统。初始平面系统无对称,且像面的位置符合表2中的要求。
[0046]
由于无对称初始平面系统的空间结构复杂,尤其是要保证初始平面系统能构建迭代得到收敛的结果,直接建立无对称初始平面系统较为困难。可以通过以下步骤建立无对称初始平面系统:
[0047]
s11,建立子午对称的离轴三反系统;以及
[0048]
s12,在所述子午对称的离轴三反系统的基础上调整平面的偏心和倾斜值,逐渐消除光线遮拦并且使像面绕其局部坐标系的y轴旋转45
°
。
[0049]
步骤s11中,子午对称离轴三反系统目前已有较为深入的研究,可以建立一个遮拦很小的子午对称离轴三反系统。该子午对称离轴三反系统的yz视图如图5所示,光阑位于第二反射镜上。
[0050]
步骤s12中,为了充分利用曲面位置灵活性的特点,调整曲面位置时尽可能使光路折叠以缩小系统体积。另外,在调整过程中,保证中心视场主光线基本入射在各个平面的中心区域上。经过上述调整后建立的初始平面系统如图6~8所示。图6与图7分别为初始平面系统的yz视图与xz视图,两图的比例尺是一致的。由图6与图7可以看出新型离轴三反初始平面系统xyz三个方向的尺寸是接近的。图8是初始平面系统的三维视图,如图所示该系统完全无对称性,并且像面具有45
°
的β倾斜。
[0051]
步骤s20可以进一步包括以下步骤:
[0052]
s21,定义特征光线,选择多个视场不同入瞳坐标的光线用于逐点计算;
[0053]
s22,确定特征光线的起点和终点;
[0054]
s23,利用逐点法计算用于构建自由曲面的数据点的坐标和法向量;以及
[0055]
s24,根据所述数据点拟合曲面的面型以及计算曲面的空间位置。
[0056]
逐点构建的第一步是定义特征光线,也就是选择多个视场不同入瞳坐标的光线用于逐点计算。由于无对称系统在视场上不具有对称性,需要全视场设计,如图9所示。本实施例中采样的视场分别是是(0
°
,0
°
)、(0
°
,-3
°
)、(0
°
,3
°
)、(4
°
,0
°
)、(4
°
,-3
°
)、(4
°
,3
°
)、(-4
°
,0
°
)、(-4
°
,-3
°
)、(-4
°
,3
°
)。
[0057]
在定义特征视场后需要进行光瞳的采样,可以选择一种极坐标网格形式对光瞳进行采样。在逐点法中,特征光线设置越多,构建的曲面会越精准,但随着光线数目增加,程序计算量会变大。因此选择采用光线数量时要综合考虑精度与程序计算量。
[0058]
在开始计算求解前,需要确定特征光线的起点和终点,其中起点可以是特征光线与系统第一面之前的任意虚拟面的交点,终点就是理想像点。当像平面的空间位置确定后,就可以根据给给定的物像关系计算理想像点在全局坐标系中的位置,具体计算方法参见公式(1)与公式(2):
[0059][0060][0061]
其中,t是旋转变换矩阵,f是系统的焦距,ω
n,x
和ω
n,x
分别是第n个特征视场x和y方向的视场角,t
n,ideal
是第n个特征视场的理想像点在全局坐标系中的坐标,x
i,de
,y
i,de
,z
i,de
分别是像面在x,y,z三个方向上的偏心,αi,βi,γi是像面的倾斜的角度。在我们设计的系统中,γi=0
°
,βi=45
°
。
[0062]
特征光线以及特征光线的起点和终点都确定之后,可以开始逐点法计算求解。通过逐点法可以计算得到用于构建自由曲面的数据点的坐标和法向量,这些数据点将用于曲面的拟合。曲面的拟合指的是拟合曲面的面型以及计算曲面的空间位置。自由曲面常见的数学表达形式是在二次曲面的基础上加入自由曲面项,如公式(3)所示:
[0063][0064]
其中,c是曲面的曲率,k是二次曲面系数,ai是自由曲面项系数,gi(x,y)是诸如zernike多项式、xy多项式等描述的自由曲面项。本实施例中采用的是最高项次数为6次的xy多项式。因此可以表示为公式(4):
[0065][0066]
子午对称系统中的自由曲面面型只需要使用xy多项式中x的偶次项描述,而无对
称系统的曲面面型可以用前n阶次中的所有项描述。根据公式(3)和公式(4),当n=6时,子午对称系统中的每个曲面的面型自由度为14,而无对称系统中的为26,可用的设计自由度多了将近一倍。
[0067]
通常自由曲面面型都是在曲面自身局部坐标系中的曲面矢高的变化函数,如公式(3)和公式(4)。这个变化函数要在局部坐标系中进行拟合,而得到的数据点的坐标和法向量都是全局坐标系中的。因此,需要先进行全局坐标与局部坐标的转换,也就是确定曲面在全局坐标系中的空间位置。
[0068]
全局坐标与局部坐标的转换方法为:将数据点拟合在一个基准二次曲面上,其中曲率半径、基准球球心位置以及二次曲面系统利用最小二乘法就能有效地拟合。离轴光学系统中曲面的位置可以用偏心和倾斜描述,其实质就是确定一种光学系统的全局坐标系通过平移和旋转得到光学曲面局部坐标系的转换方式。全局坐标的原点g先平移到局部坐标o,然后再绕自身坐标轴并按照一定顺序进行旋转,就能得到局部坐标系。这个旋转的角度就是我们需要计算的倾斜的值。拟合得到的二次曲面的基准球的球心c与中心视场主光线在待拟合曲面上的数据点d的连线可以定义为局部坐标系的z轴,c指向d的射线与拟合基准球的交点可以定义为局部坐标系的原点o。
[0069]
请参见图10,图中g为系统的全局坐标系,原点o在全局坐标系g中的坐标值就是曲面的偏心值。接下来需要计算曲面的倾斜,也就是确定一种全局坐标系z方向旋转得到局部坐标系z方向的方式。本实施例中选定的旋转方式为,全局坐标系的yoz面绕其x轴旋转α角度,得到的坐标系的xoz面再绕其y轴旋转β角度,此时的z轴方向就与定义的局部坐标系z轴方向相同。设在全局坐标系中二次曲面基准球的球心坐标为c(xc,yc,zc),局部坐标系原点为o(xo,yo,zo),按照上述平移和旋转方式,可以计算得到曲面的一种偏心和倾斜,计算方法如公式(5)~(8):
[0070]
(x
de
,y
de
,z
de
)=(xo,yo,zo)
ꢀꢀꢀ
(5)
[0071][0072][0073][0074]
待拟合曲面的偏心和倾斜值计算得到后,可以根据坐标系之间的旋转和平移关系完成全局坐标系和局部坐标系的数据点坐标及法向量的转换。设全局坐标系中某个数据点坐标为(x,y,z)及法向量(l,m,n),在局部坐标系的对应的数据点坐标(x
′
,y
′
,z
′
)其法向量(l
′
,m
′
,n
′
)可以由公式(9)~(11)给出。
[0075][0076]
(x
′
,y
′
,z
′
)=(x-x
de
,y-y
de
,z-z
de
)*t-1
ꢀꢀꢀ
(10)
[0077]
(l
′
,m
′
,n
′
)=(l,m,n)*t-1
ꢀꢀꢀ
(11)
[0078]
其中,t-1
是旋转变换矩阵t的逆矩阵。
[0079]
将全局坐标系中的数据点坐标及法向量变换为局部坐标系后,可以计算得到数据点除去二次曲面后的残差坐标和法向量。利用考虑数据点坐标及法向量的拟合方法将残差拟合自由曲面系数,实现曲面的构建。
[0080]
事实上无对称曲面的局部坐标系定义方式并不唯一,局部坐标系的z轴方向以及旋转方式都可以改变。选择不同的局部坐标系会改变后续拟合得到的自由曲面项的系数,但实际上描述的曲面面型都是一致的。然而,对于不同的局部坐标系,基准球与拟合得到的自由曲面的偏离程度不同,偏离程度小对设计和制造是有利的。另外,在确定旋转方式时,实际上还可以有xy面绕着z轴的旋转,也就是γ倾斜。但这只是加入了一个参数,而没有加入新的自由度,对曲面拟合的精度没有提升。综合考虑,上述的局部坐标系系的定义方式是最合适的,并且在单个无对称离轴自由曲面上验证,拟合后能达到衍射极限。
[0081]
重复上述自由曲面的构建过程,可以提升系统的成像质量,最终得到一个良好的优化起点。最终得到的迭代后的光学系统rms误差为0.5052,系统光路图如图11所示,迭代后的系统与初始平面的结构是一致的,迭代后的系统的像面具有45
°
的β倾斜,与预期的离轴三反结构一致。图12给出了迭代后的系统的畸变网络图,其中,深色实线代表实际像高,浅色实线代表理想像高,迭代后的系统基本能实现给定的物像关系。
[0082]
步骤s30中,还可以进一步利用光学设计软件对迭代后的系统进行优化。图12中迭代后的系统的畸变既不是桶形畸变也不是枕头畸变,系统在各个方向上的畸变完全没有对称性。因此,在优化过程中也要考虑全视场设计。本实施例中选用(0
°
,0
°
)、(0
°
,-3
°
)、(0
°
,3
°
)、(4
°
,0
°
)、(4
°
,-3
°
)、(4
°
,3
°
)、(-4
°
,0
°
)、(-4
°
,-3
°
)、(-4
°
,3
°
)这几个视场用于优化设计,与初始系统求解的采样视场一致。
[0083]
在对无对称系统进行优化时,需要控制其整体结构的同时确保系统能够实现给定的物像关系,因此需要精心给定约束条件。将(4
°
,-3
°
)、(4
°
,3
°
)、(-4
°
,-3
°
)、(-4
°
,3
°
)这四个视场的主光线与中心视场(0
°
,0
°
)的主光线在像面上的距离作为像高的约束条件,从而实现焦距以及畸变的控制。此外,约束第二反射镜在子午和弧矢方向的尺寸之比接近1,以保证光瞳是圆形的。
[0084]
固定曲面的位置并将曲面的曲率半径以及二次曲面系数设置为变量进行优化。在优化过程中逐步将各个面的自由曲面系数加入为变量。当加入了一定阶次的自由曲面后,可以将曲面的偏心和倾斜也设置为变量。像面的偏心和α倾斜也设置为变量,但是为了保持像面的特殊要求,需要固定像面的β倾斜为-45
°
。在这一步的优化中,曲面的空间位置会发生变动,因此需要加入一些系统的结构约束。控制中心视场主光线在各个曲面上的交点位于曲面中心附近,从而保证成像利用的是曲面的中心区域。另外,需要对特定光线以及光线在像面上交点位置进行控制,从而保证相邻曲面不会出现交叠,以及消除遮拦和保持系统的特殊空间结构。无对称系统在优化中,曲面位置变动的未知性大,因此需要在优化中调整结构约束,直到最终获得理想的系统结构和系统成像质量。经过优化后的光学系统结构及光路示意图如图1~图3所示。
[0085]
本实施例还进一步给出了优化后的光学系统的部分性能参数。图13为优化后的光学系统的衍射传递函数,图14为优化后的光学系统的视场rms波像差图,图15为优化后的光学系统的畸变网络图。
[0086]
最终优化后的无对称自由曲面光学系统衍射传递函数在30cycs/mm处均大于0.4,
优化后的无对称自由曲面光学系统的视场rms波像差在λ=10μm波长处的平均值约为1/20λ,优化后的无对称自由曲面光学系统具有良好的成像质量。优化后的无对称自由曲面光学系统的畸变与优化起点相比得到了极大的改善,相对畸变最大值小于5%,优化后的系统能够实现预期的物像关系。可见,无对称自由曲面光学系统能够很好的实现给定的物像关系,并且还具有良好的成像质量。此外,无对称自由曲面光学系统的畸变网络图值得特别注意,该系统在各个方向上的畸变是不相同的,它也是无对称性的。尤其是图14所示的优化起点的畸变网络图,各个方向上的畸变差异较大。这说明这类系统可以实现具有特殊的物像关系的成像光学系统。
[0087]
与现有技术相比较,本发明实施例提供的无对称自由曲面光学系统的设计方法设计时的自由度更大,设计出的曲面的空间位置约束更少,可以设计出更加紧凑的、具体特殊空间结构的光学系统。
[0088]
另外,本领域技术人员还可在本发明精神内做其他变化,当然,这些依据本发明精神所做的变化,都应包含在本发明所要求保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1