一种基于宏微两级复合作动的快速反射镜
1.本发明涉及一种基于宏微两级复合作动的快速反射镜,属于快速反射镜精密仪器光机结构设计技术领域。
背景技术:
2.快速反射镜是一种通过快速而精确地控制反射镜面的偏摆角度实现光束方向调整的先进光电器件,是支持突破精密收发匹配控制及地面标定等新一代信息技术及关键航天工程技术的核心部件之一,广泛应用于空间测绘、天文望远镜、激光探测与通讯、自适应光学、光电装置视轴稳定等需要精密指向、跟踪和稳定的领域。
3.信息技术和航空航天领域的快速发展已经催生了空间任务对“大行程”和“超高精度”兼具的需要,现广泛应用的基于音圈电机或压电陶瓷驱动的快速反射镜分别对应着大行程高精度和小行程超高精度的两类器件,受限于自身结构和驱动本身特性难以单独实现同时满足大行程和超高精度两者性能的突破,成为制约快速反射镜进一步发展以及实现关键航天工程先进设备突破的关键问题之一。
技术实现要素:
4.本发明要解决的技术问题在于:克服现有技术的不足,提供一种基于宏微两级复合作动的快速反射镜,同时满足大行程、超高精度,并且具备较强承载能力和抗强冲击性能好的优点,而且可有效解决现有快速反射镜不能兼顾大行程范围和超高精度的问题,同时在运载或发射过程中遭遇强冲击时,能够较好的保护快速反射镜结构。
5.本发明的技术方案为:一种基于宏微两级复合作动的快速反射镜,包括基座、位移传感器、宏动部、微动部、柔性细杆、柔性铰接体、动型台、镜框组件和反射镜;宏动部指音圈电机作动部件,提供1~50毫米级别的直线行程范围,能保证快速反射镜拥有毫弧度到几百弧度的大行程偏摆范围;微动部指压电陶瓷驱动部件以及桥式放大机构,压电陶瓷输出位移的精度可达到纳米级别,可确保快速反射镜具备纳弧度级别(即10
‑9弧度)的超高偏摆角位移精度。通过桥式放大机构将音圈电机和压电陶瓷两个驱动器组合连接,能保证快速反射镜同时具备大行程和超高精度的性能;
6.所述宏动部为音圈电机驱动,所述音圈电机包含音圈电机定子和动子;所述微动部为压电陶瓷组合桥式位移放大机构,由压电陶瓷和桥式位移放大机构构成;
7.所述镜框组件包括镜框、紧固板、提供预紧力的弹簧和安装螺钉,通过调整作用于紧固板的外部紧定螺钉紧固所述反射镜,镜框外部边缘周向等距布置三个反锁孔;镜框组件固定在动型台上,一起构成转动负载,且镜框组件、反射镜、动型台的几何中心同轴;动型台通过多个螺栓固定在柔性铰接体的上部,所述柔性铰接体的下部安装固定在基座上;
8.所述柔性铰接体由多重虎克铰构成,分布在以本身几何中心为原点正交的x轴和y轴方向上;多重虎克铰保证柔性铰接体在镜面法向z轴上具有平移自由度;柔性铰接体上下两个安装面的几何中心与动型台和基座的几何中心均同轴;
9.所述桥式放大机构的两连接臂中间均有孔,孔中布置有弹簧,横向安装的压电陶瓷通过弹簧与桥式放大机构连接,并通过螺栓紧固,压电陶瓷输出的横向位移通过桥式放大机构输出为镜面法向上的竖直位移,用于驱动反射镜运动;
10.所述音圈电机的定子固定在微动部中桥式放大机构的下部,动子固定在基座上,输出竖直方向的位移;
11.动型台在宏微双级作动机构驱动下带动镜框组件绕反射镜平面x轴和y轴旋转,位移传感器检测和反馈负载精密运动信息移动;
12.一个宏动部和一个微动部通过桥式放大机构连接组合成一个宏微双动的作动机构,动型台在宏微双级作动机构驱动下带动镜框反射镜负载绕反射镜平面x轴和y轴旋转,位移传感器检测和反馈负载精密运动信息,柔性铰接体具有多重虎克铰,提供镜面法向位移。
13.所述同向的一个微动部和一个宏动部通过桥式放大机构组合成一个宏微双级作动机构,快速反射镜装置在绕x轴和y轴旋转方向上各有两个宏微双级作动机构,当同轴两个宏微双级作动机构通电相反时,两个机构会输出等值反向的竖直位移,实现一推一拉,从而使得包括反射镜在内的转动负载绕轴旋转。
14.所述动型台还与四个柔性细杆相连,每个柔性细杆上部留有螺纹,与动型台通过螺母紧固,每个柔性细杆下部留有螺纹,分别与一个带有螺纹孔的桥式放大机构上部相连,柔性细杆中间部是直径远小于长度的柔性细长杆件结构,在包括反射镜、镜框在内的转动时有效减小桥式放大机构的剪切位移和应力。
15.所述桥式放大机构左右对称,包括上部两臂、下部两臂和上下部之间左右各一个的两连接臂,臂之间通过直梁型柔性铰链相连,臂看作长方体切割某角成型的实体。
16.所述微动部的数量为3~4个,且相对转动负载几何中心轴等距对称分布。
17.所述多重虎克铰中的每个虎克铰由直圆型柔性铰链构成,且所有的直圆型柔性铰链的厚度、半圆切口半径参数均相同。
18.所的宏动部的数量为3~4个,且相对转动负载几何中心轴等距对称分布。
19.所述位移传感器包括本体和感应片两部分,位移传感器本体固定在基座上,感应片安装在动型台上,用于反馈装置的位移角度信息。
20.本发明与现有技术相比的有益效果为:
21.(1)本发明快速反射镜结构上采用桥式放大机构组合连接压电陶瓷微驱动器和音圈电机宏驱动器,能够大行程范围和超高精度的实时改变反射镜偏转角、调整光学系统中传播方向,实现光束指向扫描、跟瞄和光学稳像等功能。
22.(2)兼顾大行程动态范围和超高精度运动,通过在快速反射镜结构中组合大行程的音圈电机和超高精度的压电陶瓷可解决现有音圈电机或压电陶瓷单独驱动的快速反射镜不能同时满足大行程、超高精度的缺点,最终可达到几毫弧度~上百毫弧度的大行程以及具备纳弧度级别的超高精度的优点。
23.(3)抗强冲击能力好。镜框设置有反锁孔,运载或发射时快速反射镜可由外界机械装置紧锁,当外界带来的冲击振动使得机构偏摆超过最大安全应力值时可避免损坏结构。
24.(4)结构紧凑。压电陶瓷横向安装在桥式放大机构内,可有效减小装置镜面法向尺寸。
25.(5)视野范围可进行高低姿态调整。具有多重虎克铰的柔性铰接体在宏微作动机构通入等值同向的电信号时,可以沿镜面法向运动。
26.(6)承载能力强。宏动部与微动部组合的宏微作动机构上部联合柔性细杆支撑动型台,下部安装基座上,从而可与柔性铰接体一起支撑转动负载,增强快速反射镜的承载能力。
附图说明
27.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
28.图1为本发明实施例提供的宏微两级作动的快速反射镜结构图;
29.图2为本发明实施例提供的宏微两级作动的快速反射镜结构剖面图;
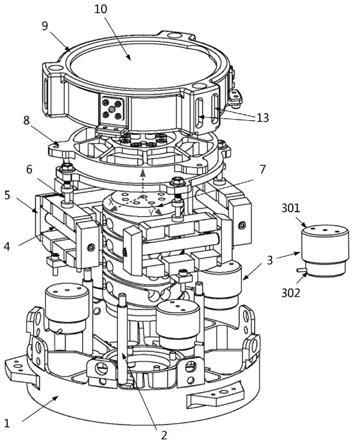
30.图3为本发明实施例提供的全部安装完成宏微两级作动快速反射镜的整体结构图;
31.图4为本发明实施例提供的具有多重虎克铰的柔性铰接体结构示意图,左图是该结构的轴测视图,右图是该结构的剖视图;
32.图5为本发明实施例提供的桥式放大机构组合压电陶瓷的微动部整体结构图,左图是该结构的局部剖视图,右图是该结构的轴测视图;
具体实施方式
33.下面结合附图及实施例对本发明进行详细说明。
34.如图1
‑
3所示,本发明的基于柔性铰链的双轴稳定快速反射镜装置包括:基座1、位移传感器、音圈电机3作为的宏动部、压电陶瓷4和组合桥式位移放大机构5构成的微动部、柔性细杆6、柔性铰接体7、动型台8、镜框组件9、反射镜10;音圈电机3包含音圈电机定子301和动子302。位移传感器包括位移传感器本体2和感应片14两部分,此类位移传感器包括电涡流传感器、电容/电阻传感器等。
35.如图1、图2、图3所示,镜框组件9通过调整作用于紧固板11的外部紧定螺钉12紧固所述反射镜10,镜框外部边缘周向等距布置三个反锁孔13,在运载或发射过程中遭遇强冲击时可由外界机械装置紧锁;镜框组件9固定在动型台8上,一起构成转动负载,且镜框组件9、反射镜10、动型台8的几何中心同轴;动型台8通过多个螺栓固定在柔性铰接体7的上部,柔性铰接体7的下部安装在固定的基座1上,柔性铰接体7可以支撑转动负载。此外,四个宏动部与四个微动部组合的宏微作动机构上部联合柔性细杆支撑动型台8,下部安装基座1上;宏微作动机构相对转动负载几何中心轴等距对称分布。柔性细杆6上部留有螺纹,与动型台8通过螺母紧固,每个柔性细杆6下部留有螺纹,分别与一个带有螺纹孔的桥式放大机构5上部相连,柔性细杆6中间部是直径远小于长度的柔性细长杆件结构,其中间部的直径需要依据柔性细长杆失稳条件和快速反射镜设计带宽共同决定。宏动部中音圈电机定子301通过螺栓安装在微动部中桥式放大机构5的下部,动子安装在基座1上,可以输出竖直方向的位移。位移传感器本体2固定在基座1上,感应片14安装在动型台8上,用于反馈装置的位移角度信息。
36.如图1
‑
4所示,柔性铰接体7具有多重虎克铰,分布在正交的x轴和y轴方向上,也是反射镜10绕轴旋转的x轴和y轴方向;多重虎克铰7在镜面法向z轴方向上刚度小,受驱动力会发生变形,可保证柔性铰接体7在镜面法向轴方向上具有平移自由度。柔性铰接体7为轴对称结构,上下两个安装面的几何中心与动型台8、基座1的几何中心均同轴;柔性铰接体7的虎克铰由直圆型柔性铰链构成,且所有的直圆型柔性铰链的厚度、宽度、半圆切口半径参数都相同。通常情况下,直圆型柔性铰链的厚度、宽度、半圆切口半径参数会影响到快速反射镜机械结构的刚度和设计寿命,直圆型柔性铰链厚度和宽度越小,直圆型柔性铰链的转动刚度越低,加工难度与成本越高,切口半径越大,转动刚度越低,结构的转动刚度低,会限制快速反射镜带宽的提高。所以在设计时,直圆型柔性铰链厚度、宽度、半圆切口半径参数需根据设计寿命、加工工艺、加工成本及总体性能指标等因素折衷确定。
37.如图3、5所示,桥式放大机构5左右对称,包括上部两臂、下部两臂和上下部之间左右各一个的两连接臂,臂之间通过直梁型柔性铰链相连,桥式放大机构5四角均被线切割一部分,即臂可看作长方体线切割某角成型的实体,这样可减轻结构重量。与柔性铰接体7一样,桥式放大机构5中直梁型柔性铰链的厚度、宽度和长度需根据设计寿命、加工工艺、加工成本及总体性能指标等因素折衷确定。微动部包括桥式放大机构5和压电陶瓷4。桥式放大机构5的两连接臂中间均有孔,孔中布置有弹簧15,提供一定的预紧力,横向安装的压电陶瓷4通过弹簧与桥式放大机构5连接,并通过螺栓紧固,压电陶瓷4输出的横向位移通过桥式放大机构5输出为镜面法向上的竖直位移,用于驱动反射镜10运动。
38.本发明的一种基于宏微两级复合作动的快速反射镜的工作模式为:同向安装的一个微动部和一个宏动部组合成一个宏微双级作动机构,快速反射镜装置在绕x轴和y轴旋转方向上各有两个宏微双级作动机构,当同轴两个宏微双级作动机构通电等值反向时,两个机构会输出等值反向的竖直位移,实现一推一拉,从而使得包括反射镜10在内的转动负载绕轴旋转。而当所有的宏微双级作动机构输入等值同向电信号时,柔性铰接体7的多重铰接体保证反射镜10实现镜面法向上的平移运动。
39.以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1