光学单元的制作方法
1.本实用新型涉及光学单元。
背景技术:
2.在利用照相机拍摄静态图像或动态图像时,有时因手抖动而导致所拍摄的像发生抖动。因此,用于能够进行防止像抖动的清晰的摄影的手抖动校正装置正在被实用化。手抖动校正装置在照相机产生了抖动的情况下,能够根据抖动来校正照相机模块的位置和姿势,由此消除像的抖动。
3.为了使具有抖动校正功能的镜头驱动装置小型化,正在研究将支承摆动校正单元的多个滚动部件中的一部分的滚动部件设计成比其他滚动部件大的自由度的情况(例如,参照专利文献1)。在专利文献1的镜头驱动装置中,通过将轭配置于与用于摆动的磁铁对置的位置,滚动部件维持轮架与壳体的接触状态,由此,确定铅垂方向的位置。
4.专利文献1:日本特开2017-90887号公报
5.在专利文献1的镜头驱动装置中,在可动体相对于固定体摆动时,驱动阻力有可能因轭与磁铁之间的引力而变大。
技术实现要素:
6.本实用新型是鉴于上述课题而完成的,其目的在于提供能够降低驱动阻力的光学单元。
7.本实用新型的第一方式提供一种光学单元,其特征在于,该光学单元具有可动体、固定体以及第一摆动机构。所述可动体具有光学元件。所述固定体位于所述可动体的周围。所述固定体将所述可动体支承为能够以第一摆动轴线为旋转中心沿第一摆动方向摆动。所述第一摆动机构使所述可动体相对于所述固定体绕所述第一摆动轴线摆动。所述可动体和所述固定体中的一方具有第一磁铁。所述可动体和所述固定体中的另一方具有第一磁性体部。所述第一磁性体部具有第一磁性体部分、第二磁性体部分以及第三磁性体部分。所述第一磁性体部分穿过与所述第一摆动轴线和所述光学元件的光轴分别垂直的轴线。所述第一磁性体部分与所述第一磁铁对置。所述第二磁性体部分相对于所述第一磁性体部分配置于所述第一摆动方向的一侧。所述第三磁性体部分相对于所述第一磁性体部分配置于所述第一摆动方向的另一侧。
8.本实用新型的第二方式的光学单元的特征在于,在第一方式的光学单元中,所述第一磁性体部分和所述第二磁性体部分在所述第一摆动方向上隔开间隔地配置,所述第一磁性体部分和所述第三磁性体部分在所述第一摆动方向上隔开间隔地配置。
9.本实用新型的第三方式的光学单元的特征在于,在第一方式或第二方式的光学单元中,以所述第一磁性体部分为基准,所述第二磁性体部分和所述第三磁性体部分配置在相对于与所述光轴和所述第一摆动轴线分别垂直的方向呈线对称的位置。
10.本实用新型的第四方式的光学单元的特征在于,在第一方式或第二方式的光学单
元中,所述第一磁性体部分、所述第二磁性体部分以及所述第三磁性体部分在同一平面上排列配置。
11.本实用新型的第五方式的光学单元的特征在于,在第四方式的光学单元中,从与所述光轴平行的方向观察时,所述第一磁性体部分、所述第二磁性体部分以及所述第三磁性体部分的至少一部分是重叠的。
12.本实用新型的第六方式的光学单元的特征在于,在第一方式或第二方式的光学单元中,所述第一磁性体部分、所述第二磁性体部分以及所述第三磁性体部分分别配置于不同的平面。
13.本实用新型的第七方式的光学单元的特征在于,在第一方式或第二方式的光学单元中,所述第一磁性体部分、所述第二磁性体部分以及所述第三磁性体部分与所述第一磁铁的第一着磁极化线垂直地配置。
14.本实用新型的第八方式的光学单元的特征在于,在第一方式或第二方式的光学单元中,该光学单元还具有第二摆动机构,该第二摆动机构使所述可动体相对于所述固定体绕第二摆动轴线摆动,所述固定体将所述可动体支承为能够以所述第二摆动轴线为旋转中心沿第二摆动方向摆动,所述第一摆动轴线和所述第二摆动轴线中的一方与所述光轴垂直,所述第一摆动轴线和所述第二摆动轴线中的另一方与所述光轴平行,所述第一磁性体部具有:第四磁性体部分,其相对于所述第一磁性体部分配置于所述第二摆动方向的一侧;以及第五磁性体部分,其相对于所述第一磁性体部分配置于所述第二摆动方向的另一侧。
15.本实用新型的第九方式的光学单元的特征在于,在第八方式的光学单元中,所述第一磁性体部分和所述第二磁性体部分隔开间隔地配置,所述第一磁性体部分和所述第三磁性体部分隔开间隔地配置,所述第一磁性体部分与所述第四磁性体部分连接,所述第一磁性体部分与所述第五磁性体部分连接,所述第二磁性体部分与所述第四磁性体部分和所述第五磁性体部分连接,所述第三磁性体部分与所述第四磁性体部分和所述第五磁性体部分连接。
16.本实用新型的第十方式的光学单元的特征在于,在第一方式或第二方式的光学单元中,该光学单元还具有连结部,该连结部连结所述第一磁性体部所具有的各磁性体部分。
17.本实用新型的第十一方式的光学单元的特征在于,在第一方式或第二方式的光学单元中,所述第一磁性体部分的厚度比所述第一磁性体部所具有的其他磁性体部分的厚度薄。
18.本实用新型的第十二方式的光学单元的特征在于,在第一方式或第二方式的光学单元中,所述第一磁性体部分的厚度比所述第一磁性体部所具有的其他磁性体部分的厚度厚。
19.本实用新型的第十三方式的光学单元的特征在于,在第一方式或第二方式的光学单元中,所述可动体和所述固定体中的一方具有多个凸部,所述可动体和所述固定体中的另一方具有多个凹部,所述多个凸部的每一个凸部和所述多个凹部的每一个凹部具有球面的一部分。
20.本实用新型的第十四方式的光学单元的特征在于,在第一方式的光学单元中,该光学单元还具有:第二摆动机构,其使所述可动体相对于所述固定体绕第二摆动轴线摆动;以及第三摆动机构,其使所述可动体相对于所述固定体绕第三摆动轴线摆动,所述固定体
将所述可动体支承为能够以所述第二摆动轴线为旋转中心沿第二摆动方向摆动,所述固定体将所述可动体支承为能够以所述第三摆动轴线为旋转中心沿第三摆动方向摆动,所述第一摆动轴线、所述第二摆动轴线以及所述第三摆动轴线相互正交,所述第一摆动轴线、所述第二摆动轴线以及所述第三摆动轴线中的一个摆动轴线与所述光轴平行,所述可动体和所述固定体中的一方具有第二磁铁和第三磁铁,所述可动体和所述固定体中的另一方具有第二磁性体部和第三磁性体部,所述第二磁性体部具有:第一磁性体部分,其穿过与所述第二摆动轴线和所述光学元件的光轴分别垂直的轴线并与所述第二磁铁对置;第二磁性体部分,其相对于所述第一磁性体部分配置于所述第二摆动方向的一侧;以及第三磁性体部分,其相对于所述第一磁性体部分配置于所述第二摆动方向的另一侧,所述第三磁性体部具有:第一磁性体部分,其穿过与所述第三摆动轴线和所述光学元件的光轴分别垂直的轴线并与所述第三磁铁对置;第二磁性体部分,其相对于所述第一磁性体部分配置于所述第三摆动方向的一侧;以及第三磁性体部分,其相对于所述第一磁性体部分配置于所述第三摆动方向的另一侧。
21.本实用新型的光学单元能够降低驱动阻力。
附图说明
22.图1是具有本实施方式的光学单元的智能手机的示意性的立体图。
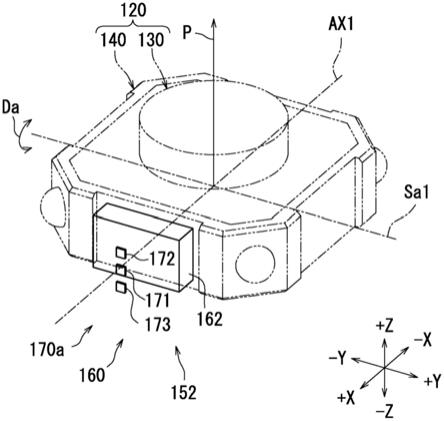
23.图2是本实施方式的光学单元的示意性的立体图。
24.图3是本实施方式的光学单元中的第一摆动机构、磁铁以及第一磁性体部的示意性的立体图。
25.图4a是沿着图2的x轴的剖视图的局部放大图。
26.图4b是第一磁性体部的示意性的侧视图。
27.图5是本实施方式的光学单元的示意性的分解立体图。
28.图6是图5所示的光学单元中的第一摆动机构、磁铁以及第一磁性体部的示意性的立体图。
29.图7是本实施方式的光学单元中的第一摆动机构、第二摆动机构、磁铁、第一磁性体部、第二磁性体部以及第三磁性体部的示意性的立体图。
30.图8是本实施方式的光学单元中的第一摆动机构、第二摆动机构、磁铁、第一磁性体部、第二磁性体部、第三磁性体部以及第四磁性体部的示意性的立体图。
31.图9a是本实施方式的光学单元中的第一摆动机构、第二摆动机构、第三摆动机构、磁铁、第一磁性体部、第二磁性体部、第三磁性体部以及第四磁性体部的示意性的立体图。
32.图9b是第一磁性体部的示意性的侧视图。
33.图10是本实施方式的光学单元的示意性的分解立体图。
34.图11是第一磁性体部的示意性的侧视图。
35.图12是沿着光学单元的x轴的剖视图的局部放大图。
36.图13是第一磁性体部的示意性的侧视图。
37.标号说明
38.100:光学单元;110:固定体;110q:凹部;120:可动体;120c:凸部;130:光学元件;152:第一摆动机构;154:第二摆动机构;156:第三摆动机构;162:第一磁铁;162m:第一着磁
极化线;164:第二磁铁;166:第三磁铁;170a:第一磁性体部;170b:第二磁性体部;170c:第三磁性体部;171:第一磁性体部分;172:第二磁性体部分;173:第三磁性体部分;174:第四磁性体部分;175:第五磁性体部分;190:连结部;ax1、ax2:轴线;da:第一摆动方向;db:第二摆动方向;dc:第三摆动方向;p:光轴;sa1:第一摆动轴线;sa2:第二摆动轴线;sa3:第三摆动轴线。
具体实施方式
39.以下,参照附图对本实用新型的光学单元的实施方式进行说明。另外,在图中,对相同或相当的部分标注相同的参照标号,而不重复进行说明。另外,在本技术说明书中,为了容易理解实用新型,有时记载了相互正交的x轴、y轴以及z轴。这里,需要注意的是,x轴、y轴以及z轴并不限定光学单元使用时的朝向。
40.光学单元100适合用作智能手机的光学部件。
41.首先,参照图1对具有本实施方式的光学单元100的智能手机200进行说明。图1是具有本实施方式的光学单元100的智能手机200的示意性的立体图。
42.如图1所示,作为一例,光学单元100搭载于智能手机200。在智能手机200中,光l从外部经由光学单元100而入射,根据入射到光学单元100的光而对被摄体像进行拍摄。光学单元100用于校正智能手机200抖动时的摄影图像的抖动。另外,光学单元100也可以具有摄像元件,光学单元100也可以具有向摄像元件传递光的光学部件。
43.光学单元100优选制作成小型。由此,能够使智能手机200自身小型化、或者能够在不使智能手机200大型化的情况下在智能手机200内搭载其他部件。
44.另外,光学单元100的用途不限定于智能手机200,能够没有特别限定地用于照相机和录像机等各种装置。例如,光学单元100例如也可以搭载于带照相机的移动电话、行车记录仪等摄影设备、或者在头盔、自行车、无线电遥控直升机(radio-controlled helicopter)等移动体上搭载的运动型照相机和可携带照相机。
45.<光学单元100的结构>
46.接着,参照图2~图4b,对本实施方式的光学单元100的结构进行说明。图2是本实施方式的光学单元100的示意性的立体图,图3是本实施方式的光学单元100中的第一摆动机构152、磁铁160以及第一磁性体部170a的示意性的立体图。另外,在图3中,用双点划线表示用于参考的可动体120。图4a是沿着图2的x轴的剖视图的局部放大图。图4b是第一磁性体部170a的示意性的侧视图。
47.如图2和图3所示,光学单元100具有固定体110、可动体120以及第一摆动机构152。可动体120具有光学元件130。可动体120插入至固定体110而保持于固定体110。固定体110位于可动体120的周围。固定体110将可动体120支承为能够以第一摆动轴线sa1为旋转中心沿第一摆动方向da摆动。第一摆动方向da是可动体120以第一摆动轴线sa1为旋转中心相对于固定体110摆动的方向。另外,第一摆动轴线sa1是假想的轴线。在固定体110的外侧面安装有fpc 180。
48.第一摆动机构152使可动体120相对于固定体110摆动。第一摆动机构152使可动体120相对于固定体110绕第一摆动轴线sa1摆动。例如,第一摆动轴线sa1与y轴方向平行地延伸。这里,第一摆动机构152相对于可动体120位于+x方向侧。
49.光学单元100也可以还具有盖部100l。盖部100l分别覆盖固定体110和可动体120的一侧,由此能够抑制可动体120从固定体110脱离。
50.可动体120包含光学元件130和保持架140。光学元件130具有光轴p。保持架140能够供光学元件130插入。
51.当将可动体120插入至固定体110从而将可动体120安装于固定体110时,光学元件130的光轴p与z轴方向平行。从该状态起,当可动体120相对于固定体110摆动时,光学元件130的光轴p摆动,因此光轴p不是与z轴方向平行的状态。
52.以下,以可动体120相对于固定体110不摆动,从而保持光轴p与z轴方向平行的状态的情况为前提进行说明。即,在以光轴p为基准,对固定体110、可动体120、盖部100l等的形状、位置关系、动作等进行说明的记载中,只要关于光轴p的倾斜没有特别记载,就是以光轴p与z轴方向平行的状态的情况为前提。
53.另外,第一摆动机构152使可动体120相对于固定体110绕第一摆动轴线sa1摆动。这里,第一摆动轴线sa1与y轴方向平行。y轴方向是与光轴p交叉的方向,成为偏转(yawing)方向的旋转的轴。典型地说,第一摆动轴线sa1与光轴p正交。
54.另外,如在本说明书中后述的那样,也可以是第一摆动机构152以外的摆动机构使可动体120相对于固定体110绕x轴方向或z轴方向摆动。x轴方向是与光轴p正交的方向,成为俯仰(pitching)方向的旋转的轴。z轴方向与光学元件130的光轴p所延伸的光轴方向平行,成为翻滚(rolling)方向的旋转的轴。
55.在具有光学元件130的光学设备中,若摄影时光学设备倾斜,则光学元件130倾斜,导致摄影图像紊乱。为了避免摄影图像的紊乱,光学单元100根据由陀螺仪等检测单元检测出的加速度、角速度以及抖动量等而校正光学元件130的倾斜。在本实施方式中,光学单元100使可动体120沿以y轴为旋转轴的旋转方向(偏转方向)摆动(旋转),由此校正光学元件130的倾斜。另外,光学单元100也可以除了偏转方向之外,还使可动体120沿以x轴为旋转轴的旋转方向(俯仰方向)和以z轴为旋转轴的旋转方向(翻滚方向)摆动(旋转),由此校正光学元件130的倾斜。
56.光学元件130的光轴p与光学元件130的光入射面的法线平行。来自光轴p的光入射到光学元件130。
57.光学元件130具有镜头132和壳体134。光学元件130也可以在壳体134内具有摄像元件。具有摄像元件的光学元件130也被称为照相机模块。当将光学元件130插入至保持架140时,光学元件130被保持架140保持。
58.保持架140具有z轴方向的两端开口的环形状。在保持架140的内侧安装有光学元件130。
59.保持架140是具有沿与光轴p正交的方向延伸的厚度的板状的框体。与光轴p正交的方向是与光轴p交叉且与光轴p垂直的方向。在本说明书中,有时将与光轴p正交的方向记载为“径向”。径向外侧表示径向中的远离光轴p的方向。在图2中,r表示径向的一例。另外,有时将以光轴p为中心进行旋转的方向记载为“周向”。在图2中,s表示周向。
60.本实施方式的光学单元100还具有磁铁160。磁铁160包含第一磁铁162。第一磁铁162相对于可动体120位于+x方向侧,并沿y轴方向延伸。
61.光学单元100还具有第一磁性体部170a。在磁铁160设置于固定体110和可动体120
中的一方的情况下,第一磁性体部170a设置于固定体110和可动体120中的另一方。这里,第一磁性体部170a安装于fpc 180。第一磁性体部170a相对于可动体120位于+x方向侧。
62.如图4a和图4b所示,第一磁性体部170a具有第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173。
63.第一磁性体部分171穿过与第一摆动轴线sa1和光学元件130的光轴p分别垂直的轴线ax1。第一磁性体部分171与第一磁铁162对置。因此,能够将可动体120保持在初始位置。初始位置表示可动体120相对于固定体110不摆动,从而保持光轴p与z轴方向平行的状态的位置。
64.第二磁性体部分172相对于第一磁性体部分171配置于第一摆动方向da的一侧。这里,第二磁性体部分172相对于第一磁性体部分171配置于+z方向侧。因此,在使可动体120向第一摆动方向da的一侧摆动的情况下,能够通过第二磁性体部分172产生作为辅助的吸附力。其结果为,能够降低使可动体120向第一摆动方向da的一侧摆动时的驱动阻力。
65.第三磁性体部分173相对于第一磁性体部分171配置于第一摆动方向da的另一侧。这里,第三磁性体部分173相对于第一磁性体部分171配置于-z方向侧。因此,在使可动体120向第一摆动方向da的另一侧摆动的情况下,能够通过第三磁性体部分173产生作为辅助的吸附力。其结果为,能够降低使可动体120向第一摆动方向da的另一侧摆动时的驱动阻力。
66.这样,磁性体沿着第一摆动方向da配置。因此,能够降低使可动体120沿第一摆动方向da摆动时的驱动阻力。
67.第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173例如呈矩形状。详细而言,第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173为正方形。另外,第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173的形状也可以互不相同。
68.第一磁性体部分171的厚度、第二磁性体部分172的厚度以及第三磁性体部分173的厚度是相同的。另外,第一磁性体部分171的厚度也可以比第一磁性体部170a所具有的其他磁性体部分的厚度薄。例如,也可以使第二磁性体部分172的厚度和第三磁性体部分173的厚度为第一磁性体部分171的厚度的两倍的厚度。在该情况下,也可以变更第一磁性体部分171的板厚、第二磁性体部分172的板厚以及第三磁性体部分173的板厚。或者,也可以变更第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173的重合张数。通过使第一磁性体部分171的厚度比第一磁性体部170a所具有的其他磁性体部分的厚度薄,能够进一步降低使可动体120沿第一摆动方向da摆动时的驱动阻力。
69.或者,第一磁性体部分171的厚度也可以比第一磁性体部170a所具有的其他磁性体部分的厚度厚。例如,也可以使第一磁性体部分171的厚度为第二磁性体部分172的厚度和第三磁性体部分173的厚度的两倍的厚度。在该情况下,也可以变更第一磁性体部分171的板厚、第二磁性体部分172的板厚以及第3磁性体部分173的板厚。或者,也可以变更第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173的重合张数。通过使第一磁性体部分171的厚度比第一磁性体部170a所具有的其他磁性体部分的厚度厚,初始位置的保持、驱动后的初始复位变得容易。
70.第一磁性体部分171和第二磁性体部分172在第一摆动方向da上隔开间隔地配置。
另外,第一磁性体部分171和第三磁性体部分173在第一摆动方向da上隔开间隔地配置。这样,仅在必要的场所配置磁性体。因此,能够使磁性体的磁力为所需最低限度。其结果为,能够降低使可动体120沿第一摆动方向da摆动时的驱动阻力。
71.另外,第一磁性体部分171与第二磁性体部分172也可以不隔开间隔而连接。另外,第一磁性体部分171与第三磁性体部分173也可以不隔开间隔而连接。
72.以第一磁性体部分171为基准,第二磁性体部分172和第三磁性体部分173配置在相对于与光轴p和第一摆动轴线sa1分别垂直的方向(x方向)呈线对称的位置。因此,摆动动作是稳定的。
73.第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173在同一平面上排列配置。这里,第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173在yz平面上排列配置。因此,能够将第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173容易地安装于固定体110或可动体120。因此,容易进行光学单元100的制造。
74.从与光轴p平行的方向观察时,第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173的至少一部分是重叠的。因此,能够降低使可动体120沿第一摆动方向da摆动时的驱动阻力。这里,从与光轴p平行的方向观察时,第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173的全部是重叠的。
75.这样,第一磁性体部分171与第一磁铁162对置。第一磁性体部170a经由fpc 180安装于固定体110。固定体110和可动体120中的一方包含第一磁铁162,固定体110和可动体120中的另一方包含第一磁性体部170a。
76.第一摆动机构152使可动体120相对于固定体110绕第一摆动轴线sa1摆动。第一摆动机构152使可动体120相对于固定体110摆动。
77.典型地说,第一摆动机构152配置于固定体110和可动体120双方。第一摆动机构152也可以由磁铁和线圈构成。或者,第一摆动机构152也可以通过向形状记忆合金提供电信号来使可动体120相对于固定体110摆动。
78.另外,在使用需要电力供给的线圈作为第一摆动机构152的一部分的情况下,线圈优选配置于固定体110。因此,如图3所示,优选第一磁铁162配置于可动体120,第一磁性体部170a配置于固定体110。由此,即使在使用需要电力供给的线圈作为第一摆动机构152的一部分的情况下,也能够将线圈配置于比可动体120容易获得空间的固定体110,因此能够将光学单元100制作成小型。
79.光学单元100优选被制作成小型。例如,在光学单元100搭载于图1的智能手机的情况下,光学单元100的大小(例如,固定体110沿x轴方向或y轴方向的长度)为10mm以上且50mm以下。
80.<光学单元100的结构>
81.接着,参照图1~图5对本实施方式的光学单元100的结构进行说明。图5是本实施方式的光学单元100的示意性的分解立体图。另外,在图5中,省略了fpc 180。
82.<固定体110>
83.固定体110呈大致筒状。固定体110的外形是截面为大致矩形状的开设有贯通孔的长方体形状。固定体110例如是树脂制的。固定体110具有框部111和侧部112。侧部112支承于框部111。在框部111上形成有开口部111h。
84.如图5所示,固定体110具有多个凹部110q。凹部110q位于侧部112的内周面。当可动体120插入至固定体110时,凹部110q与可动体120接触。典型地说,当可动体120相对于固定体110摆动时,可动体120一边与凹部110q接触一边在凹部110q的上方滑动。优选多个凹部110q分别具有凹陷的球面一部分。
85.凹部110q配置于固定体110的四个角。四个凹部110q的曲率半径也可以相等。在该情况下,四个凹部110q构成一个较大的凹球面的一部分。或者,四个凹部110q的曲率半径也可以不同。
86.可动体120还具有接触部件120a。接触部件120a配置于可动体120的外侧面。接触部件120a与固定体110接触。可动体120经由接触部件120a与固定体110接触,因此能够将可动体120稳定地支承于固定体110。另外,这里,当将可动体120插入至固定体110时,可动体120与固定体110接触,但也可以是,即使将可动体120插入至固定体110,可动体120也不与固定体110接触。
87.<可动体120>
88.可动体120包含光学元件130和保持架140。光学元件130插入至保持架140的框中。
89.<光学元件130>
90.光学元件130具有镜头132和壳体134。壳体134呈薄型的长方体形状。镜头132配置于壳体134。例如,镜头132在壳体134的一个面的中心处配置于光轴p上。光轴p和镜头132朝向被摄体,来自沿着光轴p的方向的光入射到光学元件130。
91.另外,也可以在壳体134的内部内置有摄像元件等。在该情况下,优选在摄像元件上连接有柔性布线基板(flexible printed circuit:fpc)连接。在光学元件130中拍摄的信号经由fpc向外部输出。
92.<保持架140>
93.保持架140呈框形状。保持架140从外侧包围光学元件130并保持光学元件130。例如,保持架140由树脂形成。保持架140呈筒形状,并且该保持架140具有贯通孔140h。在保持架140的贯通孔140h中插入有光学元件130。
94.接触部件120a配置于保持架140的外周面。接触部件120a与固定体110接触。
95.可动体120具有向固定体110突出的多个凸部120c。详细而言,可动体120具有接触部件120a,接触部件120a具有向固定体110突出的多个凸部120c。凸部120c位于保持架140的径向外侧。凸部120c从保持架140向径向外侧突出并与固定体110接触。由此,能够使可动体120相对于固定体110平滑地移动。
96.凸部120c也可以具有弯曲并突出的弯曲形状。例如,凸部120c呈球面状弯曲。优选多个凸部120c分别具有球面的一部分。由此,能够使可动体120相对于固定体110平滑地移动。
97.<第一摆动机构152>
98.第一摆动机构152使可动体120相对于固定体110绕第一摆动轴线sa1摆动。第一摆动轴线sa1与y轴方向平行地延伸。
99.第一摆动机构152具有第一磁铁162和线圈152b。典型地说,第一磁铁162是永磁铁。线圈152b与第一磁铁162对置。第一磁铁162包含于固定体110和可动体120中的一方,线圈152b包含于固定体110和可动体120中的另一方。通过第一磁铁162和线圈152b,能够使可
动体120相对于固定体110摆动。
100.这里,第一磁铁162配置于可动体120,线圈152b配置于固定体110。第一磁铁162相对于可动体120位于+x方向侧,线圈152b位于固定体110的+x方向侧的侧部。
101.第一磁铁162按照朝向径向外侧(+x方向侧)的面的磁极以沿着y轴方向延伸的第一着磁极化线162m为边界而不同的方式被磁化。第一磁铁162的沿z轴方向的一个端部具有一种磁性,另一个端部具有另一种磁性。
102.例如,可动体120的偏转的校正如下进行。当光学单元100产生偏转方向的抖动时,通过未图示的磁传感器(霍尔元件)检测抖动,并根据其结果而驱动第一摆动机构152。另外,也可以使用抖动检测传感器(陀螺仪)等来检测光学单元100的抖动。根据抖动的检测结果,由第一摆动机构152校正该抖动。
103.<磁铁160>
104.磁铁160产生磁场。典型地说,磁铁160是永磁铁。这里,磁铁160包含第一磁铁162。第一磁铁162安装于保持架140的侧面并位于可动体120的外侧面。
105.第一磁铁162相对于可动体120位于+x方向侧并沿y轴方向延伸。
106.<第一磁性体部170a>
107.第一磁性体部170a具有第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173。第一磁性体部分171与第一磁铁162对置地配置。第一磁性体部分171相对于可动体120位于+x方向侧,并与第一磁铁162对置。
108.另外,第一磁性体部170a优选为软磁性体。因为第一磁性体部170a是软磁性体,所以与第一磁性体部170a是永磁铁的情况相比,能够以较弱的磁作用将第一磁铁162吸引在规定的位置。因此,即使来自第一摆动机构152的驱动力比较弱,也能够使可动体120适当地移动。
109.由图5可知,可动体120是通过将光学元件130插入至保持架140而制作的。在可动体120的外侧面沿着y轴方向配置有第一磁铁162。
110.另外,在固定体110上配置有第一磁性体部170a。当将可动体120插入至固定体110时,第一磁铁162与第一磁性体部170a对置。
111.<盖部100l>
112.盖部100l覆盖固定体110和可动体120。盖部100l例如由金属成型。另外,盖部100l也可以由树脂成型。盖部100l是沿z轴方向具有厚度的板状的部件。盖部100l固定于固定体110的+z方向侧(光轴方向的一侧)。在本实施方式中,盖部100l固定于固定体110的框部111。用于将盖部100l固定于固定体110的结构没有特别限定。盖部100l例如可以使用螺钉那样的紧固部件而固定于固定体110,或者也可以使用粘接剂而固定于固定体110。
113.盖部100l具有孔100h和止转部100s。止转部100s通过与可动体120接触,限制可动体120的翻滚方向的过度旋转。孔100h沿z轴方向贯穿盖部100l。盖部100l的孔100h与固定体110的开口部111h对置。可动体120的镜头132穿过固定体110的开口部111h和盖部100l的孔100h而向固定体110的外部露出。
114.如上所述,可动体120和固定体110中的一方具有多个凸部120c。可动体120和固定体110中的另一方具有多个凹部110q。因此,能够提高可动体120相对于固定体110的滑动性。这里,可动体120具有多个凸部120c,固定体110具有多个凹部110q。
115.接着,参照图1~图6对本实施方式的光学单元100进行说明。图6是图5所示的光学单元100的第一摆动机构152、磁铁160以及第一磁性体部170a的示意性的立体图。
116.如图6所示,第一摆动机构152具有第一磁铁162和线圈152b。第一磁铁162按照朝向径向外侧的面的磁极以沿着y轴方向延伸的第一着磁极化线162m为边界而不同的方式被磁化。第一磁铁162的沿z轴方向的一个端部具有一种磁性,另一个端部具有另一种磁性。
117.通过控制在线圈152b中流动的电流的朝向和大小,能够变更从线圈152b产生的磁场的朝向和大小。因此,通过从线圈152b产生的磁场与第一磁铁162的相互作用,第一摆动机构152能够使可动体120绕第一摆动轴线sa1摆动。
118.第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173与第一磁铁162的第一着磁极化线162m垂直地配置。因此,能够有效地使用磁力。
119.优选的是,磁铁160除了第一磁铁162之外,还包含第二磁铁164。第二磁铁164安装于保持架140(参照图5)的侧面,并位于可动体120的外侧面。第二磁铁164配置于-x方向侧。
120.优选光学单元100还具有第二磁性体部170b。第二磁性体部170b位于第二磁铁164的-x方向侧。第二磁性体部170b与第一磁性体部170a同样地具有第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173。第二磁性体部170b与第一磁性体部170a同样地沿着第一摆动方向da配置有磁性体。因此,除了第一磁性体部170a之外,还能够通过第二磁性体部170b而降低使可动体120沿第一摆动方向da摆动时的驱动阻力。因此,与只有单侧的一个磁性体部的情况相比,能够进一步降低驱动阻力。
121.另外,参照图3~图6,在上述光学单元100中,通过第一摆动机构152使可动体120相对于固定体110绕第一摆动轴线sa1摆动,但本实施方式并不限定于此。可动体120也可以相对于固定体110绕与第一摆动轴线sa1不同的轴线摆动。
122.接着,参照图3~图7对本实施方式的光学单元100进行说明。图7是本实施方式的光学单元100的第一摆动机构152、第二摆动机构154、磁铁160、第一磁性体部170a、第二磁性体部170b以及第三磁性体部170c的示意性的立体图。另外,图7的光学单元100除了还具有第二摆动机构154并且还具有第三磁铁166和第三磁性体部170c这一点之外,具有与上述参照图6进行了说明的光学单元100相同的结构,为了避免冗余,而省略重复的说明。
123.如图7所示,磁铁160除了第一磁铁162和第二磁铁164之外,还包含第三磁铁166。另外,光学单元100除了第一磁性体部170a和第二磁性体部170b之外,还包含第三磁性体部170c。第一磁性体部170a、第二磁性体部170b以及第三磁性体部170c分别与第一磁铁162、第二磁铁164以及第三磁铁166对置。这样,固定体110和可动体120中的一方还具有第三磁铁166,固定体110和可动体120中的另一方还具有与第三磁铁166对置的第三磁性体部170c。这里,可动体120还具有第三磁铁166,固定体110还具有第三磁性体部170c。
124.第一磁铁162相对于可动体120位于+x方向侧。第二磁铁164相对于可动体120位于-x方向侧。第三磁铁166相对于可动体120位于-y方向侧。
125.第一磁性体部170a相对于可动体120位于+x方向侧。第二磁性体部170b相对于可动体120位于-x方向侧。第三磁性体部170c相对于可动体120位于-y方向侧。
126.第一摆动机构152使可动体120相对于固定体110摆动。详细而言,第一摆动机构152使可动体120相对于固定体110绕第一摆动轴线sa1摆动。例如,第一摆动轴线sa1与y轴方向平行地延伸。y轴方向是与光轴p交叉的方向,成为偏转方向的旋转的轴。
127.第一摆动机构152利用磁铁160。这里,第一摆动机构152包含第一磁铁162和线圈152b。第一磁铁162按照朝向径向外侧的面的磁极以沿着y轴方向延伸的第一着磁极化线162m为边界而不同的方式被磁化。第一磁铁162的沿z轴方向的一个端部具有一种磁性,另一个端部具有另一种磁性。
128.通过控制在线圈152b中流动的电流的朝向和大小,能够变更从线圈152b产生的磁场的朝向和大小。因此,利用从线圈152b产生的磁场与第一磁铁162的相互作用,第一摆动机构152能够使可动体120绕第一摆动轴线sa1摆动。
129.光学单元100除了第一摆动机构152之外,还具有第二摆动机构154。第二摆动机构154使可动体120相对于固定体110绕第二摆动轴线sa2摆动。第二摆动轴线sa2与第一摆动轴线sa1正交。例如,第二摆动轴线sa2与x轴方向平行地延伸。x轴方向是与光轴p交叉的方向,成为俯仰方向的旋转的轴。另外,第二摆动轴线sa2是假想的轴线。
130.第二摆动机构154也可以由磁铁和线圈构成。或者,第二摆动机构154也可以通过向形状记忆合金提供电信号而使可动体120相对于固定体110摆动。
131.在图7中,第二摆动机构154利用磁铁160。这里,第二摆动机构154包含第三磁铁166和线圈154b。第三磁铁166按照朝向径向外侧的面的磁极以沿着x轴方向延伸的第三着磁极化线166m为边界而不同的方式被磁化。第三磁铁166的沿z轴方向的一个端部具有一种磁性,另一个端部具有另一种磁性。
132.通过控制在线圈154b中流动的电流的朝向和大小,能够变更从线圈154b产生的磁场的朝向和大小。因此,通过从线圈154b产生的磁场与第一磁铁162的相互作用,第二摆动机构154能够使可动体120绕第二摆动轴线sa2摆动。
133.这样,第一摆动机构152包含第一磁铁162和与第一磁铁162对置的线圈152b。另外,第二摆动机构154包含第三磁铁166和与第三磁铁166对置的线圈154b。因此,能够将用于使可动体120稳定地摆动的第一磁铁162和第三磁铁166利用于第一摆动机构152和第二摆动机构154。
134.第二磁性体部170b位于第二磁铁164的-x方向侧。第三磁性体部170c位于第三磁铁166的-y方向侧。第三磁性体部170c与第一磁性体部170a和第二磁性体部170b同样地具有第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173。
135.第三磁性体部170c的第一磁性体部分171穿过与第一摆动轴线sa1和光学元件130的光轴p分别垂直的轴线ax2。第三磁性体部170c的第一磁性体部分171与第三磁铁166对置。因此,能够将可动体120保持在初始位置。初始位置表示可动体120相对于固定体110不摆动从而保持光轴p与z轴方向平行的状态的位置。
136.第三磁性体部170c的第二磁性体部分172相对于第三磁性体部170c的第一磁性体部分171配置于第二摆动方向db的一侧。这里,第三磁性体部170c的第二磁性体部分172相对于第三磁性体部170c的第一磁性体部分171配置于+z方向侧。因此,在使可动体120向第二摆动方向db的一侧摆动的情况下,能够通过第三磁性体部170c的第二磁性体部分172产生作为辅助的吸附力。其结果为,能够降低使可动体120向第二摆动方向db的一侧摆动时的驱动阻力。第二摆动方向db是可动体120以第二摆动轴线sa2为旋转中心相对于固定体110摆动的方向。
137.第三磁性体部170c的第三磁性体部分173相对于第三磁性体部170c的第一磁性体
部分171配置于第二摆动方向db的另一侧。这里,第三磁性体部170c的第三磁性体部分173相对于第三磁性体部170c的第一磁性体部分171配置于-z方向侧。因此,在使可动体120向第二摆动方向db的另一侧摆动的情况下,能够通过第三磁性体部分173产生作为辅助的吸附力。其结果为,能够降低使可动体120向第二摆动方向db的另一侧摆动时的驱动阻力。
138.这样,磁性体沿着第二摆动方向db配置。因此,在使可动体120沿第二摆动方向db摆动时也能够降低驱动阻力。
139.另外,上述参照图7进行了说明的光学单元100具有第一磁性体部170a、第二磁性体部170b以及第三磁性体部170c,但本实施方式并不限定于此。光学单元100也可以还具有第四磁性体部170d。
140.接着,参照图3~图8对本实施方式的光学单元100进行说明。图8是本实施方式的光学单元100的第一摆动机构152、第二摆动机构154、磁铁160、第一磁性体部170a、第二磁性体部170b、第三磁性体部170c以及第四磁性体部170d的示意性的立体图。另外,图8的光学单元100除了磁铁160还包含第四磁铁168,光学单元100还包含第四磁性体部170d这一点之外,具有与上述参照图7进行了说明的光学单元100相同的结构,为了避免冗余,而省略重复的说明。
141.磁铁160除了第一磁铁162、第二磁铁164以及第三磁铁166之外,还包含第四磁铁168。第一磁铁162相对于可动体120位于+x方向侧,第二磁铁164相对于可动体120位于-x方向侧。第三磁铁166相对于可动体120位于-y方向侧,第四磁铁168相对于可动体120位于+y方向侧。
142.另外,光学单元100除了第一磁性体部170a、第二磁性体部170b以及第三磁性体部170c之外,还包含第四磁性体部170d。第一磁性体部170a、第二磁性体部170b、第三磁性体部170c以及第四磁性体部170d分别与第一磁铁162、第二磁铁164、第三磁铁166以及第四磁铁168对置。第一磁性体部170a相对于可动体120位于+x方向侧,第二磁性体部170b相对于可动体120位于-x方向侧。第三磁性体部170c相对于可动体120位于-y方向侧,第四磁性体部170d相对于可动体120位于+y方向侧。
143.第四磁性体部170d与第三磁性体部170c同样地具有第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173。第四磁性体部170d与第三磁性体部170c同样地沿着第二摆动方向db配置有磁性体。因此,除了第三磁性体部170c之外,还能够通过第四磁性体部170d而降低使可动体120沿第二摆动方向db摆动时的驱动阻力。因此,与只有单侧的一个磁性体部的情况相比,能够进一步降低驱动阻力。
144.另外,这里,第一磁铁162的第一着磁极化线162m与第二磁铁164的第二着磁极化线164m平行地延伸。详细而言,第一磁铁162按照朝向径向外侧的面的磁极以沿着y轴方向延伸的第一着磁极化线162m为边界而不同的方式被磁化。第一磁铁162的沿z轴方向的一个端部具有一种磁性,另一个端部具有另一种磁性。同样地,第二磁铁164按照朝向径向外侧的面的磁极以沿着y轴方向延伸的第二着磁极化线164m为边界而不同的方式被磁化。第二磁铁164的沿z轴方向的一个端部具有一种磁性,另一个端部具有另一种磁性。
145.另外,第三磁铁166的第三着磁极化线166m与第四磁铁168的第四着磁极化线168m平行地延伸。详细而言,第三磁铁166按照朝向径向外侧的面的磁极以沿着y轴方向延伸的第三着磁极化线166m为边界而不同的方式被磁化。第三磁铁166的沿z轴方向的一个端部具
有一种磁性,另一个端部具有另一种磁性。同样地,第四磁铁168按照朝向径向外侧的面的磁极以沿着y轴方向延伸的第四着磁极化线168m为边界而不同的方式被磁化。第四磁铁168的沿z轴方向的一个端部具有一种磁性,另一个端部具有另一种磁性。
146.但是,也可以是,第一磁铁162的第一着磁极化线162m不与第二磁铁164的第二着磁极化线164m平行,第一磁铁162的第一着磁极化线162m所延伸的方向相对于第二磁铁164的第二着磁极化线164m所延伸的方向偏离。在该情况下,第一磁铁162的第一着磁极化线162m所延伸的方向优选相对于第二磁铁164的第二着磁极化线164m所延伸的方向偏离90
°
。由此,能够进一步降低可动体120以第二摆动轴线sa2为中心进行摆动时的摩擦阻力。
147.另外,在上述参照图3~图8进行的说明中,可动体120相对于固定体110绕一个摆动轴线(第一摆动轴线sa1)摆动,或者绕正交的两个摆动轴线(第一摆动轴线sa1和第二摆动轴线sa2)摆动,但本实施方式并不限定于此。可动体120也可以相对于固定体110绕三个摆动轴线摆动。
148.接着,参照图9a和图9b对本实施方式的光学单元100的结构进行说明。图9a是本实施方式的光学单元100中的第一摆动机构152、第二摆动机构154、第三摆动机构156、磁铁160、第一磁性体部170a、第二磁性体部170b、第三磁性体部170c以及第四磁性体部170d的示意性的立体图。图9b是第一磁性体部170a的示意性的侧视图。另外,图9a的光学单元100主要在除了第一摆动机构152和第二摆动机构154之外还具有第三摆动机构156这一点和第二摆动轴线sa2与光轴p平行这一点上与上述参照图8进行了说明的光学单元100不同。关于与上述参照图8进行了说明的光学单元100相同的结构,为了避免冗余,而省略重复的说明。
149.如图9a所示,光学单元100除了第一摆动机构152和第二摆动机构154之外,还具有第三摆动机构156。
150.第一摆动机构152使可动体120相对于固定体110摆动。详细而言,第一摆动机构152使可动体120相对于固定体110绕第一摆动轴线sa1摆动。这里,第一摆动轴线sa1与y轴方向平行地延伸。y轴方向是与光轴p交叉的方向,成为偏转方向的旋转的轴。典型地说,第一摆动轴线sa1与光轴p正交。
151.第二摆动机构154使可动体120相对于固定体110摆动。详细而言,第二摆动机构154使可动体120相对于固定体110绕第二摆动轴线sa2摆动。这里,第二摆动轴线sa2与z轴方向平行地延伸。z轴方向与光轴p平行,成为翻滚方向的旋转的轴。
152.第三摆动机构156使可动体120相对于固定体110摆动。详细而言,第三摆动机构156使可动体120相对于固定体110绕第三摆动轴线sa3摆动。这里,第三摆动轴线sa3与x轴方向平行地延伸。x轴方向是与光轴p交叉的方向,成为俯仰方向的旋转的轴。典型地说,第三摆动轴线sa3与光轴p垂直。另外,第三摆动轴线sa3是假想的轴线。
153.固定体110将可动体120支承为能够以第二摆动轴线sa2为旋转中心沿第二摆动方向db摆动。固定体110将可动体120支承为能够以第三摆动轴线sa3为旋转中心沿第三摆动方向dc摆动。第三摆动方向dc是可动体120以第三摆动轴线sa3为旋转中心相对于固定体110摆动的方向。
154.第一摆动轴线sa1、第二摆动轴线sa2以及第三摆动轴线sa3相互正交。第一摆动轴线sa1和第二摆动轴线sa2中的一方与光轴p垂直。这里,第一摆动轴线sa1与光轴p垂直。第一摆动轴线sa1、第二摆动轴线sa2以及第三摆动轴线sa3的一个摆动轴线与光轴p平行。另
外,第一摆动轴线sa1和第二摆动轴线sa2中的另一方与光轴p平行。这里,第二摆动轴线sa2与光轴p平行。
155.可动体120和固定体110中的一方具有第一磁铁162、第二磁铁164、第三磁铁166以及第四磁铁168。这里,可动体120具有第一磁铁162、第二磁铁164、第三磁铁166以及第四磁铁168。另外,可动体120和固定体110中的另一方具有第一磁性体部170a、第二磁性体部170b、第三磁性体部170c以及第四磁性体部170d。这里,固定体110具有第一磁性体部170a、第二磁性体部170b、第三磁性体部170c以及第四磁性体部170d。
156.第一摆动机构152包含第一磁铁162和线圈152b。第一磁铁162按照朝向径向外侧的面的磁极以沿着y轴方向延伸的第一着磁极化线162m为边界而不同的方式被磁化。第一磁铁162的沿z轴方向的一个端部具有一种磁性,另一个端部具有另一种磁性。
157.这里,第二摆动机构154包含第二磁铁164和线圈154b。第二磁铁164按照朝向径向外侧的面的磁极以沿着z轴方向延伸的第二着磁极化线164m为边界而不同的方式被磁化。第二磁铁164的沿y轴方向的一个端部具有一种磁性,另一个端部具有另一种磁性。
158.这里,第三摆动机构156包含第三磁铁166和线圈156b。第三磁铁166按照朝向径向外侧的面的磁极以沿着x轴方向延伸的第三着磁极化线166m为边界而不同的方式被磁化。第三磁铁166的沿z轴方向的一个端部具有一种磁性,另一个端部具有另一种磁性。
159.另外,第四磁铁168按照朝向径向外侧的面的磁极以沿着z轴方向延伸的第四着磁极化线168m为边界而不同的方式被磁化。第四磁铁168的沿x轴方向的一个端部具有一种磁性,另一个端部具有另一种磁性。
160.在图9a所示的光学单元100中,通过第一摆动机构152能够使可动体120沿偏转方向摆动,通过第二摆动机构154能够使可动体120沿翻滚方向摆动,通过第三摆动机构156能够使可动体120沿俯仰方向摆动。因此,在光学单元100中,能够将可动体120校正为任意的朝向。
161.另外,在图9a所示的光学单元100中,第一着磁极化线162m所延伸的方向相对于第二着磁极化线164m所延伸的方向偏离,第三着磁极化线166m所延伸的方向相对于第四磁铁168的第四着磁极化线168m所延伸的方向偏离。典型地说,优选第一着磁极化线162m所延伸的方向相对于第二着磁极化线164m所延伸的方向偏离90
°
,第三着磁极化线166m所延伸的方向相对于第四着磁极化线168m所延伸的方向偏离90
°
。由此,能够进一步降低可动体120绕第一摆动轴线sa1和第二摆动轴线sa2摆动时的摩擦阻力。
162.另外,优选第一磁铁162、第二磁铁164、第三磁铁166以及第四磁铁168中的三个磁铁分别对置有一个以上的线圈。这里,第一磁铁162、第二磁铁164以及第三磁铁166分别与线圈152b、线圈154b以及线圈154b对置。
163.这三个磁铁(第一磁铁162、第二磁铁164以及第三磁铁166)中的第二磁铁164的第二着磁极化线164m所延伸的方向与光学元件130的光轴p平行,其余的第一磁铁162的第一着磁极化线162m所延伸的方向和第三磁铁166的第三着磁极化线166m所延伸的方向与光轴p正交。由此,能够使可动体120沿着三个摆动轴线(第一摆动轴线sa1、第二摆动轴线sa2以及第三摆动轴线sa3)摆动。
164.如图9b所示,第一磁性体部170a除了第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173之外,还具有第四磁性体部分174和第五磁性体部分175。在第一磁性
体部170a中,第一磁性体部分171、第二磁性体部分172、第三磁性体部分173、第四磁性体部分174以及第五磁性体部分175彼此分开而呈十字状排列。
165.第四磁性体部分174相对于第一磁性体部分171配置于第二摆动方向db的一侧。这里,第四磁性体部分174相对于第一磁性体部分171配置于-y方向侧。因此,在使可动体120向第二摆动方向db的一侧摆动的情况下,能够通过第四磁性体部分174产生作为辅助的吸附力。其结果为,能够降低使可动体120向第二摆动方向db的一侧摆动时的驱动阻力。
166.第五磁性体部分175相对于第一磁性体部分171配置于第二摆动方向db的另一侧。这里,第五磁性体部分175相对于第一磁性体部分171配置于+y方向侧。因此,在使可动体120向第二摆动方向db的另一侧摆动的情况下,能够通过第五磁性体部分175产生作为辅助的吸附力。其结果为,能够降低使可动体120向第二摆动方向db的另一侧摆动时的驱动阻力。
167.这样,磁性体沿着第二摆动方向db配置。因此,通过第一磁性体部170a,即使在使可动体120沿第二摆动方向db摆动时,也能够降低驱动阻力。
168.另外,如图9a所示,第二磁性体部170b具有第一磁性体部分171、第二磁性体部分172、第三磁性体部分173、第四磁性体部分174以及第五磁性体部分175。
169.第二磁性体部170b的第一磁性体部分171穿过与第二摆动轴线sa2和光学元件130的光轴p分别垂直的轴线ax1。第二磁性体部170b的第一磁性体部分171与第二磁铁164对置。因此,能够将可动体120保持在初始位置。
170.第二磁性体部170b的第二磁性体部分172相对于第二磁性体部170b的第一磁性体部分171配置于第二摆动方向db的一侧。这里,第二磁性体部170b的第二磁性体部分172相对于第二磁性体部170b的第一磁性体部分171配置于+y方向侧。因此,在使可动体120向第二摆动方向db的一侧摆动的情况下,能够通过第二磁性体部170b的第二磁性体部分172产生作为辅助的吸附力。其结果为,能够降低驱动阻力。
171.第二磁性体部170b的第三磁性体部分173相对于第二磁性体部170b的第一磁性体部分171配置于第二摆动方向db的另一侧。这里,第二磁性体部170b的第三磁性体部分173相对于第一磁性体部分171配置于-y方向侧。因此,在使可动体120向第二摆动方向db的另一侧摆动的情况下,能够通过第二磁性体部170b的第三磁性体部分173产生作为辅助的吸附力。其结果为,能够降低驱动阻力。
172.另外,如图9a所示,第三磁性体部170c具有第一磁性体部分171、第二磁性体部分172、第三磁性体部分173、第四磁性体部分174以及第五磁性体部分175。
173.第三磁性体部170c的第一磁性体部分171穿过与第三摆动轴线sa3和光学元件130的光轴p分别垂直的轴线ax2。第三磁性体部170c的第一磁性体部分171与第三磁铁166对置。因此,能够将可动体120保持在初始位置。
174.第三磁性体部170c的第二磁性体部分172相对于第三磁性体部170c的第一磁性体部分171配置于第三摆动方向dc的一侧。这里,第三磁性体部170c的第二磁性体部分172相对于第三磁性体部170c的第一磁性体部分171配置于+z方向侧。因此,在使可动体120向第三摆动方向dc的一侧摆动的情况下,能够通过第三磁性体部170c的第二磁性体部分172产生作为辅助的吸附力。其结果为,能够降低使可动体120向第三摆动方向dc的一侧摆动时的驱动阻力。
175.第三磁性体部170c的第三磁性体部分173相对于第三磁性体部170c的第一磁性体部分171配置于第三摆动方向dc的另一侧。这里,第三磁性体部170c的第三磁性体部分173相对于第三磁性体部170c的第一磁性体部分171配置于-y方向侧。因此,在使可动体120向第三摆动方向dc的另一侧摆动的情况下,能够通过第三磁性体部170c的第三磁性体部分173产生作为辅助的吸附力。其结果为,能够降低使可动体120向第三摆动方向dc的另一侧摆动时的驱动阻力。
176.如上所述,在第一磁性体部170a中,磁性体沿着第一摆动方向da配置。另外,在第二磁性体部170b中,磁性体沿着第二摆动方向db配置。另外,在第三磁性体部170c中,磁性体沿着第三摆动方向dc配置。因此,能够降低使可动体120相对于3轴方向摆动时的驱动阻力。
177.<光学单元100的结构>
178.接着,参照图9a和图10对本实施方式的光学单元100的结构进行说明。图10是本实施方式的光学单元100的示意性的分解立体图。另外,在图10中,省略了fpc180。
179.如图10所示,磁铁160包含第一磁铁162、第二磁铁164、第三磁铁166以及第四磁铁168。这里,磁铁160安装于保持架140的外周面。第一磁铁162相对于保持架140位于+x方向侧。第二磁铁164相对于保持架140位于-x方向侧。第三磁铁166相对于保持架140位于-y方向侧。第四磁铁168相对于保持架140位于+y方向侧。
180.光学单元100具有第一磁性体部170a、第二磁性体部170b、第三磁性体部170c以及第四磁性体部170d。这里,第一磁性体部170a、第二磁性体部170b、第三磁性体部170c以及第四磁性体部170d安装于固定体110或fpc 180。第一磁性体部170a相对于fpc 180位于+x方向侧。第二磁性体部170b相对于fpc 180位于-x方向侧。第三磁性体部170c相对于fpc 180位于-y方向侧。第四磁性体部170d位于固定体110的内侧面的+y方向侧。
181.第一摆动机构152包含第一磁铁162和与第一磁铁162对置的线圈152b。第一磁铁162和线圈152b相对于可动体120位于+x方向侧。
182.第二摆动机构154包含第二磁铁164和与第二磁铁164对置的线圈154b。第二磁铁164和线圈154b相对于可动体120位于-x方向侧。
183.第三摆动机构156包含第三磁铁166和与第一磁铁162对置的线圈156b。第三磁铁166和线圈156b相对于可动体120位于-y方向侧。
184.例如,可动体120的俯仰、偏转以及翻滚的校正如下那样进行。当光学单元100产生俯仰方向、偏转方向以及翻滚方向中的至少一个方向的抖动时,通过未图示的磁传感器(霍尔元件)检测抖动,并根据该结果驱动第一摆动机构152、第二摆动机构154以及第三摆动机构156,从而使可动体120摆动。另外,也可以使用抖动检测传感器(陀螺仪)等检测光学单元100的抖动。根据抖动的检测结果,向线圈152b、线圈154b以及线圈156b提供电流来校正该抖动。
185.另外,在参照图9b进行了说明的第一磁性体部170a中,第一磁性体部分171、第二磁性体部分172、第三磁性体部分173、第四磁性体部分174以及第五磁性体部分175彼此分开而呈十字状排列,但本实施方式并不限定于此。第四磁性体部分174和第五磁性体部分175也可以与第一磁性体部分171连接。
186.参照图11对第一磁性体部170a的变形例进行说明。图11是第一磁性体部170a的示
意性的侧视图。
187.如图11所示,第一磁性体部170a具有第一磁性体部分171、第二磁性体部分172、第三磁性体部分173、第四磁性体部分174以及第五磁性体部分175。
188.第一磁性体部分171和第二磁性体部分172隔开间隔地配置。第一磁性体部分171和第三磁性体部分173隔开间隔地配置。第一磁性体部分171与第四磁性体部分174连接。第一磁性体部分171与第五磁性体部分175连接。第二磁性体部分172与第四磁性体部分174和第五磁性体部分175连接。第三磁性体部分173与第四磁性体部分174和第五磁性体部分175连接。因此,第一磁性体部170a是将第一磁性体部分171、第二磁性体部分172、第三磁性体部分173、第四磁性体部分174以及第五磁性体部分175结合而成的。其结果为,能够减少部件数量。
189.另外,在上述参照图3~图11进行的说明中,第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173在同一平面上排列配置,但本实施方式并不限定于此。第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173也可以分别配置于不同的平面。
190.接着,参照图12对本实施方式的光学单元100的结构进行说明。图12是沿着光学单元100的x轴的剖视图的局部放大图。
191.如图12所示,第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173分别配置于不同的平面。这里,第一磁性体部分171在-y方向侧与第一磁铁162对置地配置。第二磁性体部分172配置于第一磁铁162的上方(+z方向侧)。第三磁性体部分173配置于第一磁铁162的下方(-z方向侧)。通过第一磁性体部分171、第二磁性体部分172以及第三磁性体部分173分别配置于不同的平面,磁性体的配置的自由度提高。因此,能够将磁性体配置于能够更有效地使用磁力的位置。
192.另外,在参照图9b进行了说明的第一磁性体部170a中,第一磁性体部分171、第二磁性体部分172、第三磁性体部分173、第四磁性体部分174以及第五磁性体部分175彼此分开而呈十字状排列,但本实施方式并不限定于此。例如,也可以通过连结部190连结第一磁性体部170a所具有的各磁性体部分。
193.参照图13对连结部190进行说明。图13是第一磁性体部170a的示意性的侧视图。
194.如图13所示,光学单元100也可以还具有连结部190。连结部190连结第一磁性体部170a所具有的各磁性体部分。这里,连结部190连结第一磁性体部分171、第二磁性体部分172、第三磁性体部分173、第四磁性体部分174以及第五磁性体部分175。连结部190例如是片状的树脂。在该情况下,通过在片状的树脂中埋入各磁性体部分来连结各磁性体部分。然后,将埋入有各磁性体部分的片状的树脂安装于固定体110或可动体120。或者,连结部190例如是粘合片。通过将各磁性体部分粘贴于粘合片来连结各磁性体部分。然后,将粘贴有各磁性体部分的粘合片安装于固定体110或可动体120。因此,能够减少部件数量,因此光学单元100的制造变得容易。
195.以上,参照附图(图1~图13)对本实用新型的实施方式进行了说明。但是,本实用新型不限于上述实施方式,能够在不脱离其主旨的范围内以各种方式来实施。为了便于理解,附图主要示意性地示出各个构成要素,为了便于制作附图,图示的各构成要素的厚度、长度、个数等有时与实际不同。另外,在上述的实施方式中示出的各构成要素的材质、形状、尺寸等只是一例,没有特别限定,能够在实质上不脱离本实用新型的效果的范围内进行各
种变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1