一种光学成像结构的制作方法
1.本发明涉及显示器件技术领域,具体为一种光学成像结构。
背景技术:
2.光在我们周围无处不在,光学成像是利用光的特性进行成像的技术,光学成像技术被利用到我们生活的各个领域,有相机、摄像机、望远镜、投影仪等,通过光学成像的结构,也可以形成裸眼3d的效果,裸眼3d是对不借助偏振光眼镜等外部工具,实现立体视觉效果的技术的统称,该类型技术的代表主要有光屏障技术、柱状透镜技术等。
3.现今的光学成像设备只能呈现无限延申隧道的视觉效果,在隧道中间不能呈现影像,无法实现空中成像的效果,同时现有光学成像技术展示的内容通过背景空间与前景影像的视觉差来呈现立体感,立体感相对较弱。
技术实现要素:
4.本发明的目的在于提供一种光学成像结构,包括:光学成像组件,包括框架、显示屏、发光元件、光学玻璃和镜面,所述光学玻璃固定安装于所述框架一侧,所述镜面固定安装于所述框架另一侧,若干所述发光元件固定安装于所述框架内壁,所述显示屏固定安装于所述框架底部,所述显示屏部分贴合于镜面;和用户追踪组件,包括眼动追踪装置,设置于框架上方,用于采集观看者的眼部影像和头部影像。
5.可选的,发光元件发出的光通过在镜面与光学玻璃之间进行反复的反射,呈现出无限延伸的隧道视觉,显示屏上显示的影像在无限延伸的隧道中间浮空显示。
6.可选的,所述镜面为凹字形,显示屏贴合于凹字形镜面的空缺部分。
7.可选的,所述眼动追踪装置将采集到的眼部影像和头部影像提供给全息影像处理平台,全息影像处理平台通过眼动追踪算法和/或头部追踪算法计算出观看者观看的视线方向以及头部位置。
8.可选的,根据观看者观看的视线方向以及头部位置,同步调整所述光学成像组件所展示的影像的视觉角度。
9.可选的,所述显示屏实时显示所述眼部影像和头部影像。
10.可选的,所述光学玻璃和镜面是一种涂覆化学涂层的玻璃,表面涂覆化学涂层的光学玻璃和镜面相比未涂覆化学涂层的光学玻璃和镜面具有较强的反射率和较高的透明度。
11.与现有技术相比,本发明的有益效果是:1、本发明通过在镜面与光学玻璃之间进行反复的反射,呈现出无限延伸的隧道视觉,显示屏上显示的影像在无限延伸的隧道中间浮空显示,影像与其后的隧道空间形成视觉距离差,呈现出浮空成像的视觉效果,通过眼动追踪装置及全息处理平台对观看者位置的探测及数据算法处理,及时的调整全息影像的显示角度,使观看者始终能够观测到正确透视关系的影像角度,结合浮空成像的视觉效果,从而实现裸眼3d浮空成像的视觉效果。
12.2、本发明眼动追踪装置通过底座和安装座固定在位移带外壁表面,位移带带动眼动追踪装置沿着框架外壁移动,同时转动电机启动可以带动眼动追踪装置转动,使眼动追踪装置可以冲多角度对使用者进行观测,使成像结果更加的准确。
附图说明
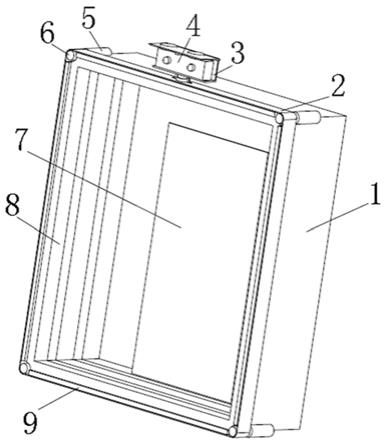
13.图1为本发明结构示意图;图2为本发明正面图;图3为本发明俯视图;图4为本发明眼动追踪装置安装图;图5为本发明背面图;图6为本发明显示区域图;图7为本发明视角x成像图;图8为本发明视角y成像图;图9为本发明视角x俯视图;图10为本发明视角y俯视图。
14.附图标号说明:1、框架;2、位移带;3、安装座;4、眼动追踪装置;5、驱动电机;6、驱动滚轮;7、显示屏;8、发光元件;9、支撑板;10、光学玻璃;11、镜面;12、微型风扇;13、安装盖;14、转动电机;15、底座;16、支撑腿;17、支撑柱。
15.本发明目的的实现、功能特点及优点将结合实施例,参照附图作进一步说明。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.请参阅图1、图2、图3、图5、图6、图7、图8,本发明提供一种光学成像结构(设备),用于实现裸眼3d光学成像。包括的光学成像组件和用户追踪组件。所述光学成像组件用于生成影像。所述用户追踪组件用于追踪用户眼部和/或头部,确定观看者方位及视角,并根据观看者方位及视角,同步调整所述光学成像组件生成的影像所呈现的角度或位置,实现裸眼3d浮空成像的视觉效果。
18.如图1所示,所述光学成像组件包括框架1、显示屏7、发光元件8、光学玻璃10和镜面11。框架1为内部中空且至少有一面开口的框状结构。其形状可以为长方体、圆柱体等。在一些实施例中,框架1的形状与显示屏7的形状匹配。在本实施例中,框架1为长方体。
19.显示屏7可以是液晶(lcd)显示屏、发光二极管(led)显示屏、有机发光二极管(oled)显示屏、迷你led(mini led)显示屏、微型led(micro led)显示屏等。在一些实施例中,显示屏7可以是led显示屏或oled显示屏。显示屏7设置在框架1的内部。在一些实施例中,显示屏7固定安装于框架1底部,框架1的侧壁环绕显示屏7。
20.发光元件8设置在框架1的四边内壁,发光元件8为led灯带、led屏或其他能够发射
光线的元件或材质中的任意一种或多种。
21.光学玻璃10固定安装于框架1一侧,镜面11固定安装于框架1另一侧,本实例中,光学玻璃10与镜面11是一种涂有特殊化学涂层的玻璃,表面涂覆化学涂层的光学玻璃和镜面相比未涂覆化学涂层的光学玻璃和镜面具备较强的反射率可以用于影像的反射,同时具备很高的透明度,本实例中化学涂层可选用水性光扩散涂层,涂层材质可选水性聚丙烯酸树脂。
22.所述显示屏7部分贴合于镜面11。在本实施例中,如图5所示,镜面11为凹字形,显示屏7贴合于凹字形镜面11空缺部分,镜面11的左右上三边可以反射框架1内壁的发光元件8发出的光线。在本实施例中,镜面11紧贴在显示屏7上,如图6所示,显示屏7被分成贴附了镜面11的显示区域b和没有贴附镜面11上的显示区域a。在显示区域b的部分,镜面11的反射特性可以将框架1左右两侧及顶部的发光元件8发出的光线与光学玻璃10进行反复反射,形成无限延伸的空间;在显示区域a的部分,显示屏7用来显示影像,由于该区域没有贴附镜面11,而显示屏7不具备反射特性,因此显示屏7所发出的光,不会与光学玻璃10形成反复反射。
23.在使用中,发光元件8点亮后形成的光带,通过在镜面11与光学玻璃10之间进行反复的反射,呈现出无限延伸的隧道视觉,显示屏7上显示的影像在无限延伸的隧道中间浮空显示,影像与其后的隧道空间形成视觉距离差,呈现出浮空成像的视觉效果。
24.用户追踪组件包括眼动追踪装置4。眼动追踪装置4安装于框架1上方,用于采集观看者的眼部影像和/或头部影像。该装置将采集到的影像提供给全息影像处理平台。全息影像处理平台通过眼动追踪算法和/或头部追踪算法计算出观看者观看的视线方向以及头部位置。根据以上信息同步调整所展示的影像的视觉角度(例如,调整框架1的朝向),并实时的将该影像显示在显示屏7上,使影像展示的角度始终与观看者的观测视角保持一致,使观看者始终能够观测到正确透视关系的影像角度。另外,结合浮空成像的视觉效果,从而实现最佳的裸眼3d浮空成像的视觉效果。参阅图1,眼动追踪装置4和显示屏7分别连接于全息影像处理平台,且眼动追踪装置4和显示屏7通过全息影像处理平台相连接。
25.眼动追踪装置4是基于视频的眼动追踪装置的核心多个摄像头和红外照明器,它们可以拍摄一系列的面部及眼睛图像,全息处理平台在接收到眼动追踪装置发来的图像信息后首先进行人脸检测,人脸检测方法就是opencv中集成好的级联分类器,利用haar特征或lbp特征训练多个弱分类模型,组成最终的分类器,进行人脸检测,opencv中提供了现有的算法模型,本发明中眼动追踪装置4的算法为:得到整个人脸图像后,截取出左右眼部区域的感兴趣区域(roi)图像,左右眼的区域大小和位置大概是固定的,眼动追踪装置4收集到图像的长宽分别为wi,hi,眼部区域的长宽为we,he,则有:则有:对于左右眼roi图像左上角像素点位置:
其中,x
l
,y
l
表示左眼roi图像左上角像素点位置坐标,xr,yr表示右眼roi图像左上角像素点位置坐标。通过该公式对人脸检测图片的图片计算后可确定人眼在图像中的大概位置范围,提取出眼部的具体图像。
26.眼动跟踪软件使用图像处理算法来识别上述算法提取的眼部图像中的两个关键位置—瞳孔中心和角膜反射中心,眼睛旋转时,眼动追踪装置4上瞳孔中心的位置会改变,但是当头部稳定时,角膜反射(cr)的位置相对于摄像头传感器固定。
27.如果眼睛完全固定在空间中并简单地绕其自身的中心旋转,则仅在摄像机传感器上跟踪瞳孔中心的变化就可以确定注视的位置。
28.头动追踪主要通过场景深度信息采集,2d面部追踪定位的方式实现。场景深度信息采集主要是采用被动测距传感中最常用的方法:双目立体视觉,该方法通过眼动追踪装置4上两个相隔一定距离的摄像机同时获取同一场景的两幅图像,通过立体匹配算法找到两幅图像中对应的像素点,随后根据三角原理计算出时差信息,而视差信息通过转换可用于表征场景中物体的深度信息。另外基于立体匹配算法,还可以通过拍摄同一场景下不同角度的一组图像来获得该场景的深度图像。除此之外,场景深度信息还可以通过对图像的光度特征、明暗特征等特征进行分析间接估算得到。
29.得到场景深度图像后,确定观看者的头部在场景中的空间位置。结合头部的位置以及眼睛观看的位置,就可以计算出观看者的观看视角,从而通过全息处理平台对展示的3d影像进行显示角度的调整。使观看者可以看到正确透视关系的影像角度,场景深度信息也可以通过结构光测量技术来进行采集。结构光是具有特定模式的光,其具有例如点、线、面等模式图案,基于结构光的深度图像获取原理是:将结构光投射至场景,并由图像传感器捕获相应的带有结构光的图案,由于结构光的模式图案会因为物体的形状发生变形,因此通过模式图像在捕捉得到的图像中的位置以及形变程度利用三角原理计算即可得到场景中各点的深度信息。
30.在实际应用中,可使用深度图像体感设备kinect对眼动追踪装置4检测的数据进行处理并成像,kinect有三个镜头,除了获取rgb彩色图像的摄像机之外,左右两边的镜头分别是红外线发射器和红外线cmos摄像机,这两个镜头共同构成了kinect的深度传感装置,其投影和接收区域相互重叠,kinect采用了一种名为光编码(lightcoding)的技术,不同于传统的结构光方法投射一幅二维模式图案的方法,kinect的光编码的红外线发射机发射的是一个具有三维纵深的“立体编码”。光编码的光源被称为激光散斑,其形成原理是激
光照射到粗糙物体或穿透毛玻璃后得到了随机的衍射斑点。激光散斑具有高度的三维空间随机性。当完成一次光源标定后,整个空间的散斑图案都被记录,因此,当物体放进该空间后,只需得知物体表面的散斑图案,就可以知道该物体所处的位置,进而获取该场景的深度图像。
31.本实例中,如图9和图10所示,如果观看者处于视角x观看位置时,眼动追踪装置4追踪的观看者眼部和/或头部的信息通过全息影像处理平台的眼动追踪算法及头部追踪算法计算后,将显示内容的角度调整为视角x所示的角度。当观看者移动到视角y位置,全息影像处理平台会根据眼动追踪装置4实时传送的数据,通过算法计算出全息影像的相对应显示角度,并实时的显示在显示屏7上,调整后的显示角度调整为视角y所示角度。
32.参阅图1、图4,在实际应用中,框架1外壁对角分别设置有四个驱动电机5,驱动电机5一端均连接有驱动滚轮6,驱动滚轮6外壁安装有位移带2,位移带2外壁固定连接有底座15,底座15顶端开设有安装槽,安装槽槽壁底端固定安装有转动电机14,转动电机14顶端安装有安装座3,眼动追踪装置4固定安装于安装座3内壁底端,安装座3顶端转动安装有安装盖13,安装盖13底端固定安装有两个微型风扇12,微型风扇12位置与眼动追踪装置4相对应,安装座3呈l形,安装座3底端固定连接有两个支撑柱17,支撑柱17一端开设有滑动槽,滑动槽槽壁两侧滑动安装有支撑腿16,支撑腿16位于位移带2外壁表面,支撑腿16顶端与滑动槽槽壁顶端通过弹簧相连接;驱动电机5启动带动位移带2转动,眼动追踪装置4通过底座15和安装座3固定在位移带2外壁表面,位移带2带动眼动追踪装置4沿着框架1外壁移动,同时转动电机14启动可以带动眼动追踪装置4转动,使眼动追踪装置4可以冲多角度对使用者进行观测,使成像结果更加的准确,同时安装盖13盖住眼动追踪装置4对眼动追踪装置4进行保护,微型风扇12可以对眼动追踪装置4镜头的灰尘进行清理,防止灰尘影响到眼动追踪装置4的检测。
33.参阅图1,框架1外壁分别固定安装有四个支撑板9,支撑板9位置与位移带2相对应,支撑板9位于位移带2下方;支撑板9支撑在位移带2下方,对位移带2起到支撑的作用,可以减少位移带2的晃动,使眼动追踪装置4移动的更加平稳。
34.本发明的工作流程及原理:在使用光学成像设备时,发光元件8点亮后形成的光带,通过在镜面11与光学玻璃10之间进行反复的反射,呈现出无限延申的隧道视觉,显示屏7上显示的影像在无限延申的隧道中间浮空显示,影像与其后的隧道空间形成视觉距离差,呈现出浮空成像的视觉效果,通过眼动追踪装置4及全息处理平台对观看者位置的探测及数据算法处理,及时的调整全息影像的显示角度,使观看者始终能够观测到正确透视关系的影像角度,结合浮空成像的视觉效果,从而实现裸眼3d浮空成像的视觉效果。
35.以上内容是结合具体实施方式对本发明作进一步详细说明,不能认定本发明具体实施只局限于这些说明,对于本发明所属技术领域的普通技术人员来说,在不脱离本发明的构思的前提下,还可以做出若干简单的推演或替换,都应当视为属于本发明所提交的权利要求书确定的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1