用于微纳台阶样品的显微镜自动对焦系统及其对焦方法与流程
1.本发明涉及激光自动对焦技术领域,具体涉及一种用于微纳台阶样品的显微镜自动对焦系统及其对焦方法。
背景技术:
2.光学显微镜通过透镜成像的方式对物体表面图像进行放大,为了获得有意义的图像,显微物镜必须精确地聚焦在样品表面,而高倍显微物镜的景深一般只有几个微米,显微镜的操作人员往往需要耗费大量的时间手动调节物镜到样品之间的距离实现对焦。
3.自动对焦技术通过反馈信号推算出物镜当前的离焦量,并将其转换为电机的运动信号,通过电机带动物镜运动将对焦过程自动化。根据反馈信号的种类不同,可将自动对焦技术分为图像自动对焦技术和激光自动对焦技术两种。
4.如专利cn110865453a,图像自动对焦技术通过设计图像清晰度评价函数,以数字图像处理的方式计算当前图像的清晰度,以量化的清晰度值为依据判断当前的离焦量。激光自动对焦技术将激光直接投射在样品表面,通过样品表面反射回来的激光状态来判断物镜的离焦量。
5.图像自动对焦技术完全依赖于采集到的图像状态,容易受到光照环境的影响,需要在焦点附近来回扫描确定最佳对焦位置,对焦速度较慢、对焦范围较小。相比之下激光对焦技术,在普通显微镜的基础上,增加了一路激光信号,具有更大的对焦范围和更快的对焦速度,被广泛应用在工业检测领域。
6.现有技术中进行显微镜对焦时,均为对平面物品进行对焦,在对表面具有凹凸不平的台阶结构面样品对焦时,存在对焦精度不足,无法区分上、下表面的问题。
技术实现要素:
7.为解决上述技术问题,本发明提供一种用于微纳台阶样品的显微镜自动对焦系统及其对焦方法。
8.为解决上述技术问题,本发明采用如下技术方案:
9.一种用于微纳台阶样品的显微镜自动对焦系统,微纳台阶样品的表面为由台阶、凹槽组成的台阶结构面,自动对焦系统包括激光器、显微物镜、cmos相机、电机;所述激光器发出的激光束,从显微物镜半边的上方进入显微物镜内,经显微物镜聚焦投影在微纳台阶样品上,微纳台阶样品的台阶结构面反射激光束,穿过显微物镜的另外半边,被cmos相机接收形成光斑图像。
10.进一步地,自动对焦系统还包括柱透镜、挡板、第一分束镜、第二分束镜、检焦透镜;对焦光路如下:激光器发出的激光束为圆形平行光,激光束经过柱透镜的调制作用后,变为在平行于纸面的方向上准直、在垂直于纸面的方向上发散的非对称光束,非对称光束经过挡板后只在光轴的一侧传播,经过第一分束镜的反射作用到达第二分束镜,经过第二分束镜的反射作用进入显微物镜一侧,并被显微物镜投影在微纳台阶样品的表面上,激光
被微纳台阶样品的表面反射后被显微物镜的另一侧收集,连续经过第二分束镜的反射、第一分束镜的折射后到达检焦透镜,经过检焦透镜的会聚后被cmos相机接收,形成所述光斑图像。
11.一种用于微纳台阶样品的显微镜自动对焦系统的对焦方法,当所述光斑图像包含柱状凸起,且相邻柱状凸起底端通过线连接时,显微物镜的焦点在微纳台阶样品的台阶顶面或凹槽底面,通过电机调节显微物镜与微纳台阶样品的距离,使显微物镜的焦点落在被台阶顶面或凹槽底面:显微物镜焦点在台阶顶面上方时的形成的光斑图像记为图像a,显微物镜焦点在凹槽底面下方时形成的光斑图像记为图像b,则当所述光斑图像中柱状凸起的方向与图像a中柱状凸起的方向一致时,显微物镜的焦点落在台阶顶面;当光斑图像中柱状凸起的方向与图像b中柱状凸起的方向一致时,显微物镜的焦点落在凹槽底面。
12.进一步地,显微物镜的焦距为f,微纳台阶样品的凹槽底面到显微物镜的间距为l1,微纳台阶样品的台阶顶面到显微物镜的间距为l2,l1大于l2;穿过显微物镜的激光,一部分照射到微纳台阶样品上表面中的台阶顶面,一部分照射到微纳台阶样品上表面中的凹槽底面;
13.当l1小于f时,穿过显微物镜的激光在台阶顶面和凹槽底面处的截面均为上半椭圆,激光在台阶顶面内的截面面积大于在凹槽底面内的截面面积,此时在cmos相机上形成的光斑图像由两个高度不同的上半椭圆分割单元交错组合而成;
14.当l1等于f时,穿过显微物镜的激光在凹槽底面处的截面为线、在台阶顶面处的截面为上半椭圆,此时在cmos相机上形成的光斑图像由上半椭圆分割单元和线交错组合而成;
15.当f介于l1、l2之间时,穿过显微物镜的激光在凹槽底面处的截面内为下半椭圆、在台阶顶面处的截面为上半椭圆,此时在cmos相机上形成的光斑图像由上半椭圆分割单元和下半椭圆分割单元交错组合而成;
16.当l2等于f时,穿过显微物镜的激光在台阶顶面处截面内会聚为线、在凹槽底面处的截面为下半椭圆,此时在cmos相机上形成的光斑图像由下半椭圆分割单元和线交错组合而成;
17.当l2大于f时,穿过显微物镜的激光在台阶顶面和凹槽底面处的截面均为下半椭圆,激光在台阶顶面内的截面面积小于在凹槽底面内的截面面积,此时在cmos相机上形成的光斑图像由两个高度不同的下半椭圆分割单元交错组合而成。
18.具体地,上半椭圆分割单元为一个上半椭圆被两条纵向平行线分割后、在两条纵向平行线之间的部分;下半椭圆分割单元为一个下半椭圆被两条纵向平行线分割后、在两条纵向平行线之间的部分;上半椭圆分割单元和下半椭圆分割单元即为所述柱状凸起。
19.对焦方法,具体包括以下步骤:
20.步骤s1:打开激光器和cmos相机,将只在光轴一侧传播的激光束投射到微纳台阶样品的表面;
21.步骤s2:调整cmos相机的曝光时间,获得光斑图像;
22.步骤s3:用纵向平行线将光斑图像分为k段,满足:
23.24.其中,l为激光在光斑图像中会聚为线时的宽度,h1为台阶顶面的横向尺寸,h2为凹槽底面的横向尺寸,floor为向下取整运算,min为取最小值运算;
25.计算每一段光斑图像在y方向上的质心cog
yt
:
[0026][0027]
其中,f
t
(i,j)为第t段光斑图像中第i行、第j列像素的灰度值,t=1,2,3,
…
,k,i=1,2,3,
…
,m;j=1,2,3,
…
,n;
[0028]
步骤s4:选择微纳台阶样品的对焦表面,对焦表面为台阶顶面或凹槽底面;
[0029]
步骤s5:若要实现对台阶顶面对焦,选择k段光斑图像中质心的最小值作为当前激光质心cog
now
;若要实现对凹槽底面对焦,则选择k段光斑图像质心的最大值作为当前激光质心cog
now
,即:
[0030][0031]
步骤s6:将当前激光质心cog
now
和对焦参考质心cog
ref
做对比,当|cog
now-cog
ref
|《0.5s时完成对焦,当|cog
now-cog
ref
|≥0.5s时,则执行步骤s7;其中,s为显微物镜的对焦灵敏度,单位为像素/景深;s和cog
ref
通过对焦前标定方法标定得到;
[0032]
步骤s7:将当前激光质心cog
now
和对焦参考质心cog
ref
的差值转化为显微物镜的离焦量δz:
[0033][0034]
步骤s8:根据离焦量δz调整显微物镜和微纳台阶样品间的距离,重复步骤s2至s8直至对焦完成。
[0035]
具体地,步骤s6中所述的对焦前标定方法包括以下步骤:
[0036]
步骤s61:使用表面平整无台阶无图案的平面反射镜作为标定时的对焦样品;
[0037]
步骤s62:打开cmos相机,手动控制电机带动显微物镜运动,显微物镜的焦距为f,物距为l,当l《f时,光斑图像为上半椭圆,上半椭圆的短轴长度随l的增大而减小;当l=f时,光斑图像为一条线,当l》f时,cmos相机上接收到的光斑图像为下半椭圆,下半椭圆的短轴长度随l的增大而增大;
[0038]
步骤s63:调整显微物镜的位置至cmos相机上的光斑图像为一条线;
[0039]
步骤s64:显微物镜的景深为d,控制电机向下移动10d的距离,计算此时光斑图像的质心cogy和方差dy,记为cog
y1
和d
y1
;其中方差dy的计算公式为:
[0040][0041]
步骤s65:控制电机向上运动扫描,每次移动的步长为0.5d,共移动40步,每次移动计算一次光斑图像在y方向的质心cogy和方差oy,得到质心序列cog
y1
,cog
y2
,
…
,cog
y41
和方差序列d
y1
,d
y2
,
…
,d
y41
;
[0042]
步骤s66:找到方差最小时对应的质心,将该质心作为对焦参考质心cog
ref
,对焦灵敏度
[0043]
具体地,步骤s8中,将离焦量δz转换为电机的驱动信号,通过电机带动显微物镜运动来调整显微物镜和微纳台阶样品间的距离。
[0044]
与现有技术相比,本发明的有益技术效果是:
[0045]
激光自动对焦技术的常用实现方案有半圆点光斑和半圆线光斑这两种,光斑质心的位置可以指示成像系统的离焦量的大小和方向。这种把整个激光光斑质心作为离焦信号指标的处理方式,易受待测样本表面高低结构的影响,可能会导致视场内部分区域无法清晰成像。本发明中的对焦系统,光路先经过显微物镜的一侧聚焦投影在微纳台阶样品上,然后经微纳台阶样品表面反射并经过显微物镜的另一侧,最终在cmos相机上形成光斑图像;通过判断cmos相机上的光斑图像是否为柱状凸起和线交错排列而成,确定显微物镜的焦点位置,按照对焦需求调整显微物镜与微纳台阶样品的距离,实现将显微物镜对焦到台阶顶面或凹槽底面。
附图说明
[0046]
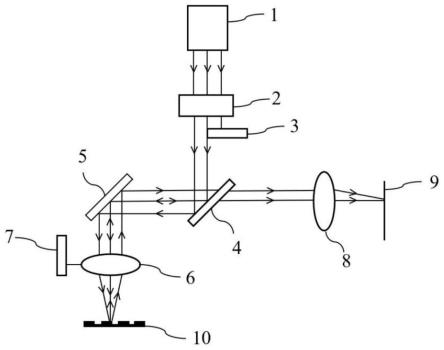
图1为本发明自动对焦系统以及对焦光路的示意图;
[0047]
图2为本发明不同物距所对应的激光束截面示意图;
[0048]
图3为本发明微纳台阶样品表面的形态示意图;
[0049]
图4为本发明物距不同时cmos相机所接收到的光斑图像示意图;
[0050]
图5为本发明对光斑图像进行分段的示意图;
[0051]
图6为本发明区分台阶顶面和凹槽底面的自动对焦流程图;
[0052]
图7为本发明样品为镜面、物距改变时cmos相机所接收到的光斑图像的变化图;
[0053]
图8为本发明实施例中物距不同时cmos相机所接收到的光斑图像示意图;
[0054]
图9为本发明实施例中对光斑图像进行分段的示意图。
[0055]
图中:1、激光器;2、柱透镜;3、挡板;4、第一分束镜;5、第二分束镜;6、显微物镜;7、电机;8、检焦透镜;9、cmos相机;10、微纳台阶样品;101、台阶顶面;102、凹槽底面。
具体实施方式
[0056]
下面结合附图对本发明的一种优选实施方式作详细的说明。
[0057]
一种用于微纳台阶样品的显微镜自动对焦系统,对焦光路如图1所示,对焦系统包括激光器1、柱透镜2、挡板3、第一分束镜4、第二分束镜5、显微物镜6、电机7、检焦透镜8、cmos相机9、微纳台阶样品10。激光器1发出的圆形平行光,进入柱透镜2,经过柱透镜2的调制作用后,变为在平行于纸面的方向上准直、在垂直于纸面的方向上发散的非对称光束;非对称光束经过挡板3后,将损失一半的能量,且只在光轴的一侧传播,经过第一分束镜4的反射作用到达第二分束镜5,经过第二分束镜5的反射作用,进入显微物镜6一侧,并被显微物镜6一侧投影在微纳台阶样品10的表面上,由于微纳台阶样品表面的反射作用,激光再次被显微物镜6另一侧收集,连续经过第二分束镜5的反射、第一分束镜4的折射后到达检焦透镜8,经过检焦透镜8的会聚后被cmos相机9接收。根据cmos相机9接收到的光斑图案状态来计算显微物镜6的离焦量,并将离焦量转化为电机7的控制信号,驱动电机7带动显微物镜6运动,实现自动对焦。
[0058]
设显微物镜6的焦距为f,物距为l;在l从小于f增加到大于f的过程中,穿过显微物
镜6的光束截面形状变化,如图2所示,当l小于f时,光束截面为一上半椭圆,且l越大椭圆的短轴长度小;当l等于f时,在平行于纸面的方向上,入射显微物镜6的光束为平行光,经过显微物镜6的调制后会聚为点,在垂直于纸面的方向上,入射显微物镜6的光束为发散光,在显微物镜6焦点位置为线段,因此光束截面为一条线,线的宽度为l;当l大于f时,光束截面为下半椭圆,且l越大,椭圆的短轴长度越大。
[0059]
如图3所示,当穿过显微物镜6的激光打在微纳台阶样品10表面,微纳台阶样品10的上表面为台阶结构面,台阶结构面包括台阶和凹槽,微纳台阶样品的凹槽底面102到显微物镜的间距为l1,微纳台阶样品的台阶顶面101到显微物镜的间距为l2,l1大于l2;穿过显微物镜6的激光,一部分照射到微纳台阶样品10上表面的台阶顶面101,一部分照射到微纳台阶样品10上表面的凹槽底面102,经微纳台阶样品10的上表面反射,并依次经显微物镜6、第二分束镜5、第一分束镜4、检焦透镜8作用,照射到cmos相机9上,形成光斑图像;光斑图像包含台阶顶面101、凹槽底面102的位置信息,如图4所示。
[0060]
当l1小于f时,穿过显微物镜6的激光在台阶顶面101和凹槽底面102均为上半椭圆,且激光在台阶顶面101内的截面面积大于在凹槽底面102内的截面面积;激光经台阶顶面101和凹槽底面102反射后,在cmos相机上形成的光斑图像由两个高度不同的上半椭圆分割单元交错组合而成,参见图4(a)。
[0061]
当l1等于f时,穿过显微物镜6的激光在凹槽底面102截面内会聚为线,在台阶顶面101截面内仍为上半椭圆;激光经台阶顶面101和凹槽底面102反射后,在cmos相机上形成的光斑图像由上半椭圆分割单元和线交错组合而成,参见图4(b)。
[0062]
当f介于l1、l2之间时,穿过显微物镜6的激光在凹槽底面102截面内为下半椭圆,在台阶顶面101截面内为上半椭圆;激光经台阶顶面101和凹槽底面102反射后,在cmos相机上形成的光斑图像由上半椭圆分割单元和下半椭圆分割单元交错组合而成,参见图4(c)。
[0063]
当l2等于f时,穿过显微物镜6的激光在台阶顶面101截面内会聚为线,在凹槽底面102截面内为下半椭圆,激光经台阶顶面101和凹槽底面102反射后,在cmos相机上形成的光斑图像由下半椭圆分割单元和线交错组合而成,参见图4(d)。
[0064]
当l2大于f时,穿过显微物镜6的激光在台阶顶面101内的截面面积小于在凹槽底面102内的截面面积,经台阶顶面101和凹槽底面102反射后,在cmos相机上形成的光斑图像由两个高度不同的下半椭圆分割单元交错组合而成,参见图4(e)。
[0065]
其中,上半椭圆分割单元为一个上半椭圆被两条纵向平行线分割后、在两条纵向平行线之间的部分;下半椭圆分割单元为一个下半椭圆被两条纵向平行线分割后、在两条纵向平行线之间的部分;上半椭圆分割单元和下半椭圆分割单元即为所述柱状凸起。
[0066]
无论显微物镜6的焦距与微纳台阶样品10的物距如何变化,光斑图像中总是同时包含了微纳台阶样品10的台阶结构面的信息,且均为两种图案的组合。如图5所示,将光斑图像分为段竖条,满足:
[0067][0068]
其中,l为图2中激光会聚为线时的宽度,h1为台阶顶面101的横向尺寸,h2为凹槽底面102的横向尺寸,floor为向下取整运算,min为取最小值运算。k段激光中必有某一段只包含了台阶顶面101和凹槽底面102返回的激光,只要找出单独对应台阶顶面101、凹槽底面
102的激光,并将激光状态装换为显微物镜6的离焦量,即可实现微纳台阶样品10上台阶顶面101、凹槽底面102的区分和对焦。
[0069]
如图5所示,对焦方法的流程包括以下步骤:
[0070]
步骤s1:打开激光器1和cmos相机9,将只在光轴一侧传播的线状激光投射到微纳台阶样品10的表面;
[0071]
步骤s2:调整cmos相机9的曝光时间,获得从微纳台阶样品10表面返回的光斑图像;
[0072]
步骤s3:如图4所示,将光斑图像分为k段,计算每一段光斑图像在y方向上的质心cog
yt
:
[0073][0074]
其中,f
t
(i,j)为第t段光斑图像中第i行、第j列像素的灰度值,t=1,2,3,
…
,k,i=1,2,3,
…
,m;j=1,2,3,
…
,n;
[0075]
步骤s4:选择微纳台阶样品10上表面合适的对焦表面,微纳台阶样品10的上表面为包含台阶和凹槽的台阶结构面;对焦表面为台阶顶面101或凹槽底面102;
[0076]
步骤s5:由图3~5可知,被台阶顶面101反射的激光,在cmos相机9上形成的光斑图像,在竖直方向上的质心,总小于被凹槽底面102反射的激光,在cmos相机9上形成的光斑图像,在竖直方向上的质心。若要实现对台阶顶面101对焦,则选择k段质心中的最小值,作为当前激光质心cog
now
;若要实现对凹槽底面102对焦,则选择k段质心中的最大值,作为当前激光质心cog
now
,即:
[0077][0078]
步骤s6:将激光当前质心cog
now
和对焦参考质心cog
ref
做对比,当cog
now
落在参考范围内,即|cog
now-cog
ref
|《0.5s时,代表已对焦,若cog
now
不在参考范围内,则执行步骤s7,其中s为物镜的对焦灵敏度,其单位为像素/景深,s和cog
ref
通过对焦前标定方法标定得到;
[0079]
步骤s7:将当前激光质心cog
now
和对焦参考质心cog
ref
的差值转化为物镜的离焦量δz,转化公式为:
[0080][0081]
步骤s8:将离焦量转换为电机驱动信号,通过电机7带动显微物镜运动来调整物镜和样品间的距离,重复步骤s2至s8,直至对焦完成;
[0082]
步骤s6中的所述对焦前标定方法,包括以下步骤:
[0083]
步骤s61:使用表面平整无台阶无图案的平面反射镜作为标定时的对焦样品;
[0084]
步骤s62:打开cmos相机9,手动控制电机7带动显微物镜6运动,显微物镜6的焦距为f,物距为l。当物距l改变时,穿过显微物镜6的激光截面的变化如图2所示,被第二分束镜5反射、在cmos相机9上接收到的光斑图像的变化如图7所示。当l《f时,cmos相机9上接收到的光斑图像为上半椭圆,椭圆短轴的长度随l的增大而减小;当l=f时,cmos相机9上接收到的光斑图像为一条线,当l》f时,cmos相机9上接收到的光斑图像为下半椭圆,椭圆短轴的长度随l的增大而增大;
[0085]
步骤s63:调整显微物镜6的位置至cmos相机9上的光斑为一条横线;
[0086]
步骤s64:设当前显微物镜6的景深为d,控制电机7向下移动10d的距离,计算此时光斑图像的质心cogy和方差dy,记为cog
y1
和d
y1
。方差dy的计算公式为:
[0087][0088]
其中,f(i,j)为光斑图像中第i行、第j列像素的灰度值,i=1,2,3,
…
,m;
[0089]
j=1,2,3,
…
,n;
[0090]
步骤s65:控制电机7向上运动扫描,每次移动的步长为0.5d,共移动40步,每次移动计算一次光斑图像在y方向的质心cogy和方差dy,得到质心序列
[0091]
cog
y1
,cog
y2
,
…
,cog
y41
和方差序列d
y1
,d
y2
,
…
,d
y41
;
[0092]
步骤s66:找到方差最小时对应的质心,将该质心作为对焦参考质心cog
ref
,对焦灵敏度s的计算方法为:
[0093][0094]
本发明的实施例中显微物镜6的焦距f为20μm,景深d为10μm,物镜对焦时激光的宽度l为200μm,设被测台上微纳台阶样品10表面的台阶顶面101横向尺寸h1为25μm,微纳台阶样品10表面的凹槽底面102横向尺寸h2为25μm;台阶顶面101到凹槽底面102的距离为30μm,大于物镜景深,凹槽底面102到显微物镜的间距为l1,台阶顶面101到显微物镜6的间距为l2。当物距改变时,cmos相机9上接收到的光斑图像如图8所示:当l1小于20μm时的光斑图像参见图8(a);当l1等于20μm时的光斑图像参见图8(b);当l1大于20μm且l2小于20μm时的光斑图像参见图8(c);当l2等于20μm时的光斑图像参见图8(d);当l2大于20μm时的光斑图像,参见图8(e)。
[0095]
本发明的实施例中,k=9;如图9所示,将cmos相机9接收到的光斑图像分为9段竖条。
[0096]
本发明可以准确区分样品的上、下表面,解决表面存在超出成像物镜景深的凹陷、凸起结构的样本对焦失败的问题。
[0097]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内,不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0098]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立技术方案,说明书的这种叙述方式仅仅是为了清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1