摄像镜头的制作方法
1.本实用新型涉及光学成像设备技术领域,具体而言,涉及一种摄像镜头。
背景技术:
2.目前,智能手机行业发展的日渐成熟,随着用户对手机功能需求的不断更新,各厂商为满足用户的各种需求,需要不断更新研发技术以满足大众,以手机的拍照功能为例,现如今手机的拍照功能成为人们选购手机的重要因素,因此手机厂商对于手机上的摄像镜头提出了更多新的需求。目前手机上的摄像镜头有大像面、大光圈、超薄的发展趋势,大大的增加了光学设计的难度,特殊的还需结合图像算法等方式实现镜头特性。
3.与普通手机所采用的摄像镜头相比,以上的设计参数需求不仅提高了手机的摄像镜头的成像能力同时也增加了业内的竞争优势。其中大像面可以提升系统的分辨率;大光圈可以增加进光量从而提升镜头拍摄夜景的能力;超薄特性可以使镜头与机体实现更好的融合,利于轻薄小型化。基于手机供应商提出的上述需求,传统的设计方式已不足以有效应对这些挑战,需要结合新的设计思路来实现。
4.也就是说,现有技术中的摄像镜头存在大像面、大光圈和超薄化难以同时实现的问题。
技术实现要素:
5.本实用新型的主要目的在于提供一种摄像镜头,以解决现有技术中的摄像镜头存在大像面、大光圈和超薄化难以同时实现的问题。
6.为了实现上述目的,根据本实用新型的一个方面,提供了一种摄像镜头,由被摄物侧至像侧依次包括:第一透镜,第一透镜具有屈折力;第二透镜,第二透镜具有屈折力;第三透镜,第三透镜具有屈折力;第四透镜,第四透镜具有负屈折力;第五透镜,第五透镜具有正屈折力;第六透镜,第六透镜具有负屈折力;第一透镜至第六透镜中相邻两个透镜之间具有空气间隔;其中,第二透镜的被摄物侧面为凹面;平衡高频性能时,摄像镜头的光圈值fno1满足:fno1《2.0;平衡低频性能时,摄像镜头的光圈值fno2满足:fno2》2.2。
7.进一步地,第一透镜的被摄物侧面至成像面的轴上距离ttl与摄像镜头的有效焦距f之间满足:ttl/f《1.2。
8.进一步地,摄像镜头的最大视场角fov满足:80
°
<fov<90
°
。
9.进一步地,第二透镜的被摄物侧面的曲率半径r3与摄像镜头的有效焦距f之间满足:-3.5<r3/f<-1.5。
10.进一步地,第三透镜的有效焦距f3与摄像镜头的有效焦距f之间满足:10.0<f3/f<17.0。
11.进一步地,第二透镜的有效焦距f2与第三透镜的有效焦距f3之间满足:-6.0<f3/f2<-3.0。
12.进一步地,第四透镜的有效焦距f4与第五透镜的有效焦距f5之间满足:-4.0<f4/
f5<-3.0。
13.进一步地,第三透镜的被摄物侧面的曲率半径r5与摄像镜头的有效焦距f之间满足:2.5<r5/f<7.0。
14.进一步地,第六透镜的像侧面的曲率半径r12与第六透镜的有效焦距f6之间满足:1.0<r12/f6<2.0。
15.进一步地,第二透镜在光轴上的中心厚度ct2与第二透镜和第三透镜在光轴上的空气间隔t23之间满足:1.0<t23/ct2<3.0。
16.进一步地,第三透镜的像侧面和光轴的交点至第三透镜的像侧面的有效半径顶点之间的轴上距离sag32与第六透镜的被摄物侧面和光轴的交点至第六透镜的被摄物侧面的有效半径顶点之间的轴上距离sag61之间满足:4.0<sag61/sag32<5.5。
17.进一步地,第四透镜的被摄物侧面和光轴的交点至第四透镜的被摄物侧面的有效半径顶点之间的轴上距离sag41与第六透镜的像侧面和光轴的交点至第六透镜的像侧面的有效半径顶点之间的轴上距离sag62之间满足:2.0<sag62/sag41<3.0。
18.进一步地,第二透镜与第三透镜的组合焦距f23与摄像镜头的有效焦距f之间满足:-4.5<f23/f<-3.5。
19.根据本实用新型的另一方面,提供了一种摄像镜头,由被摄物侧至像侧依次包括:第一透镜,第一透镜具有屈折力;第二透镜,第二透镜具有屈折力;第三透镜,第三透镜具有屈折力;第四透镜,第四透镜具有负屈折力;第五透镜,第五透镜具有正屈折力;第六透镜,第六透镜具有负屈折力;第一透镜至第六透镜中相邻两个透镜之间具有空气间隔;其中,平衡低频性能时,摄像镜头的光圈值fno2满足:fno2》2.2;第一透镜的被摄物侧面至成像面的轴上距离ttl与摄像镜头的有效焦距f之间满足:ttl/f《1.2。
20.进一步地,摄像镜头的最大视场角fov满足:80
°
<fov<90
°
。
21.进一步地,第二透镜的被摄物侧面为凹面;平衡高频性能时,摄像镜头的光圈值fno1满足:fno1《2.0;第二透镜的被摄物侧面的曲率半径r3与摄像镜头的有效焦距f之间满足:-3.5<r3/f<-1.5。
22.进一步地,第三透镜的有效焦距f3与摄像镜头的有效焦距f之间满足:10.0<f3/f<17.0。
23.进一步地,第二透镜的有效焦距f2与第三透镜的有效焦距f3之间满足:-6.0<f3/f2<-3.0。
24.进一步地,第四透镜的有效焦距f4与第五透镜的有效焦距f5之间满足:-4.0<f4/f5<-3.0。
25.进一步地,第三透镜的被摄物侧面的曲率半径r5与摄像镜头的有效焦距f之间满足:2.5<r5/f<7.0。
26.进一步地,第六透镜的像侧面的曲率半径r12与第六透镜的有效焦距f6之间满足:1.0<r12/f6<2.0。
27.进一步地,第二透镜在光轴上的中心厚度ct2与第二透镜和第三透镜在光轴上的空气间隔t23之间满足:1.0<t23/ct2<3.0。
28.进一步地,第三透镜的像侧面和光轴的交点至第三透镜的像侧面的有效半径顶点之间的轴上距离sag32与第六透镜的被摄物侧面和光轴的交点至第六透镜的被摄物侧面的
有效半径顶点之间的轴上距离sag61之间满足:4.0<sag61/sag32<5.5。
29.进一步地,第四透镜的被摄物侧面和光轴的交点至第四透镜的被摄物侧面的有效半径顶点之间的轴上距离sag41与第六透镜的像侧面和光轴的交点至第六透镜的像侧面的有效半径顶点之间的轴上距离sag62之间满足:2.0<sag62/sag41<3.0。
30.进一步地,第二透镜与第三透镜的组合焦距f23与摄像镜头的有效焦距f之间满足:-4.5<f23/f<-3.5。
31.应用本实用新型的技术方案,摄像镜头由被摄物侧至像侧依次包括第一透镜、第二透镜、第三透镜、第四透镜、第五透镜和第六透镜,第一透镜具有屈折力;第二透镜具有屈折力;第三透镜具有屈折力;第四透镜具有负屈折力;第五透镜具有正屈折力;第六透镜具有负屈折力;第一透镜至第六透镜中相邻两个透镜之间具有空气间隔;其中,第二透镜的被摄物侧面为凹面;平衡高频性能时,摄像镜头的光圈值fno1满足:fno1《2.0;平衡低频性能时,摄像镜头的光圈值fno2满足:fno2》2.2。
32.通过合理约束各透镜的屈折力,有利于光线的平稳过渡,有利于保证最终的成像质量。通过控制平衡高频性能时,摄像镜头的光圈值fno1在2.0以下,有利于获得更大的进光量,提高成像面的照度与芯片的响应,从而降低系统的功耗。通过控制平衡低频性能时,摄像镜头的光圈值fno2在2.2以上,是为了适当的降低低频性能,拉近高低频性能差值。本技术提供的为一种大像面、大光圈、超薄化的六片式摄像镜头,利用双光圈的优化方式能够有效的拉近高低频性能,满足算法需求和高端智能手机上主摄像头的应用需求。
附图说明
33.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
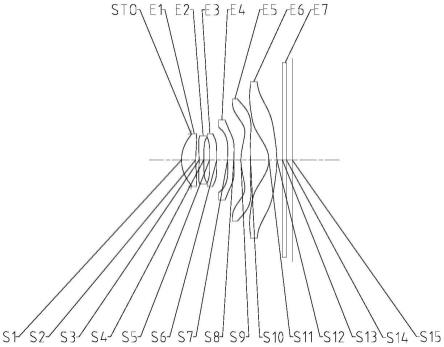
34.图1示出了本实用新型的例子一的摄像镜头的结构示意图;
35.图2至图5分别示出了图1中的摄像镜头的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
36.图6示出了本实用新型的例子二的摄像镜头的结构示意图;
37.图7至图10分别示出了图6中的摄像镜头的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
38.图11示出了本实用新型的例子三的摄像镜头的结构示意图;
39.图12至图15分别示出了图11中的摄像镜头的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
40.图16示出了本实用新型的例子四的摄像镜头的结构示意图;
41.图17至图20分别示出了图16中的摄像镜头的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
42.图21示出了本实用新型的例子五的摄像镜头的结构示意图;
43.图22至图25分别示出了图21中的摄像镜头的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
44.图26示出了本实用新型的例子六的摄像镜头的结构示意图;
45.图27至图30分别示出了图26中的摄像镜头的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
46.图31示出了一个可选例子的摄像镜头的高低频mtf曲线图。
47.其中,上述附图包括以下附图标记:
48.sto、光阑;e1、第一透镜;s1、第一透镜的被摄物侧面;s2、第一透镜的像侧面;e2、第二透镜;s3、第二透镜的被摄物侧面;s4、第二透镜的像侧面;e3、第三透镜;s5、第三透镜的被摄物侧面;s6、第三透镜的像侧面;e4、第四透镜;s7、第四透镜的被摄物侧面;s8、第四透镜的像侧面;e5、第五透镜;s9、第五透镜的被摄物侧面;s10、第五透镜的像侧面;e6、第六透镜;s11、第六透镜的被摄物侧面;s12、第六透镜的像侧面;e7、滤光片;s13、滤光片的被摄物侧面;s14、滤光片的像侧面;s15、成像面。
具体实施方式
49.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
50.需要指出的是,除非另有指明,本技术使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
51.在本实用新型中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的,或者是针对部件本身在竖直、垂直或重力方向上而言的;同样地,为便于理解和描述,“内、外”是指相对于各部件本身的轮廓的内、外,但上述方位词并不用于限制本实用新型。
52.应注意,在本说明书中,第一、第二、第三等的表述仅用于将一个特征与另一个特征区分开来,而不表示对特征的任何限制。因此,在不背离本技术的教导的情况下,下文中讨论的第一透镜也可被称作第二透镜或第三透镜。
53.在附图中,为了便于说明,已稍微夸大了透镜的厚度、尺寸和形状。具体来讲,附图中所示出的球面或非球面的形状通过实例的方式示出。即,球面或非球面的形状不限于附图中示出的球面或非球面的形状。附图仅为示例而并非严格按比例绘制。
54.在本文中,近轴区域是指光轴附近的区域。若透镜表面为凸面且未界定该凸面位置时,则表示该透镜表面至少于近轴区域为凸面;若透镜表面为凹面且未界定该凹面位置时,则表示该透镜表面至少于近轴区域为凹面。每个透镜靠近被摄物侧的表面成为该透镜的被摄物侧面,每个透镜靠近像侧的表面称为该透镜的像侧面。在近轴区域的面形的判断可依据该领域中通常知识者的判断方式,以r值,(r指近轴区域的曲率半径,通常指光学软件中的透镜数据库(lens data)上的r值)正负判断凹凸。以被摄物侧面来说,当r值为正时,判定为凸面,当r值为负时,判定为凹面;以像侧面来说,当r值为正时,判定为凹面,当r值为负时,判定为凸面。
55.为了解决现有技术中的摄像镜头存在大像面、大光圈和超薄化难以同时实现的问题,本实用新型提供了一种摄像镜头。
56.实施例一
57.如图1至图31所示,摄像镜头由被摄物侧至像侧依次包括第一透镜、第二透镜、第三透镜、第四透镜、第五透镜和第六透镜,第一透镜具有屈折力;第二透镜具有屈折力;第三
透镜具有屈折力;第四透镜具有负屈折力;第五透镜具有正屈折力;第六透镜具有负屈折力;第一透镜至第六透镜中相邻两个透镜之间具有空气间隔;其中,第二透镜的被摄物侧面为凹面;平衡高频性能时,摄像镜头的光圈值fno1满足:fno1《2.0;平衡低频性能时,摄像镜头的光圈值fno2满足:fno2》2.2。
58.通过合理约束各透镜的屈折力,有利于光线的平稳过渡,有利于保证最终的成像质量。通过控制平衡高频性能时,摄像镜头的光圈值fno1在2.0以下,有利于获得更大的进光量,提高成像面的照度与芯片的响应,从而降低系统的功耗。通过控制平衡低频性能时,摄像镜头的光圈值fno2在2.2以上,是为了适当的降低低频性能,拉近高低频性能差值。本技术提供的为一种大像面、大光圈、超薄化的六片式摄像镜头,利用双光圈的优化方式能够有效的拉近高低频性能,满足算法需求和高端智能手机上主摄像头的应用需求。
59.在本实施例中,第一透镜的被摄物侧面至成像面的轴上距离ttl与摄像镜头的有效焦距f之间满足:ttl/f《1.2。通过约束第一透镜的被摄物侧面至成像面的轴上距离ttl与摄像镜头的有效焦距f之间的比值,可以提升摄像镜头的灵活性,能够有效平衡视场角和体积,有利于扩展摄像镜头的应用范围。
60.在本实施例中,摄像镜头的最大视场角fov满足:80
°
<fov<90
°
。通过合理约束摄像镜头的最大视场角fov,有利于获得较大的视场范围,能够提高摄像镜头对物方信息的捕捉能力。优选地,89
°
<fov<90
°
。
61.在本实施例中,第二透镜的被摄物侧面的曲率半径r3与摄像镜头的有效焦距f之间满足:-3.5<r3/f<-1.5。满足此条件式,可以合理分配系统的屈折力,平衡系统前端光学透镜和后端光学透镜产生的像散量,使得系统具有良好的成像质量。优选地,-3.3<r3/f<-1.9。
62.在本实施例中,第三透镜的有效焦距f3与摄像镜头的有效焦距f之间满足:10.0<f3/f<17.0。满足此条件式,能够对光学系统后面透镜产生的剩余球差进行平衡,使得轴上的像差较小,可以获得良好的成像质量。优选地,10.0<f3/f<16.8。
63.在本实施例中,第二透镜的有效焦距f2与第三透镜的有效焦距f3之间满足:-6.0<f3/f2<-3.0。满足此条件式,能够合理约束第二透镜和第三透镜的有效焦距的比值,从而合理控制两个透镜的场曲贡献量,使得其平衡在合理的状态。优选地,-5.6<f3/f2<-3.2。
64.在本实施例中,第四透镜的有效焦距f4与第五透镜的有效焦距f5之间满足:-4.0<f4/f5<-3.0。满足此条件式,可以减小光线的偏转角,提高摄像镜头的成像质量。优选地,-3.8<f4/f5<-3.1。
65.在本实施例中,第三透镜的被摄物侧面的曲率半径r5与摄像镜头的有效焦距f之间满足:2.5<r5/f<7.0。满足此条件式,能够有效的控制摄像镜头的象散量,进而可以改善轴外视场的成像质量。优选地,2.8<r5/f<6.8。
66.在本实施例中,第六透镜的像侧面的曲率半径r12与第六透镜的有效焦距f6之间满足:1.0<r12/f6<2.0。满足此条件式,能够控制三阶彗差在合理的范围内,进而能平衡前端光学透镜产生的彗差量,使得摄像镜头具有良好的成像质量。优选地,1.4<r12/f6<1.6。
67.在本实施例中,第二透镜在光轴上的中心厚度ct2与第二透镜和第三透镜在光轴
上的空气间隔t23之间满足:1.0<t23/ct2<3.0。满足此条件式,可以有效的限制第二透镜的位置,有利于实现摄像镜头结构的紧凑性,同时有利于矫正轴外像差,提升摄像镜头整体像质。优选地,1.1<t23/ct2<2.8。
68.在本实施例中,第三透镜的像侧面和光轴的交点至第三透镜的像侧面的有效半径顶点之间的轴上距离sag32与第六透镜的被摄物侧面和光轴的交点至第六透镜的被摄物侧面的有效半径顶点之间的轴上距离sag61之间满足:4.0<sag61/sag32<5.5。满足此条件式,有利于降低第三透镜和第六透镜的敏感度,方便透镜的加工成型。优选地,4.1<sag61/sag32<5.2。
69.在本实施例中,第四透镜的被摄物侧面和光轴的交点至第四透镜的被摄物侧面的有效半径顶点之间的轴上距离sag41与第六透镜的像侧面和光轴的交点至第六透镜的像侧面的有效半径顶点之间的轴上距离sag62之间满足:2.0<sag62/sag41<3.0。满足此条件式,可以有效地避免第四透镜和第六透镜产生的鬼像,有利于降低系统的鬼像风险。优选地,2.2<sag62/sag41<2.7。
70.在本实施例中,第二透镜与第三透镜的组合焦距f23与摄像镜头的有效焦距f之间满足:-4.5<f23/f<-3.5。满足此条件式,能够合理的控制屈折力的贡献范围,同时合理的控制其球差的贡献率,使得其能合理的平衡透镜的屈折力。优选地,-4.5<f23/f<-3.6。
71.实施例二
72.如图1至图31所示,摄像镜头由被摄物侧至像侧依次包括:第一透镜,第一透镜具有屈折力;第二透镜,第二透镜具有屈折力;第三透镜,第三透镜具有屈折力;第四透镜,第四透镜具有负屈折力;第五透镜,第五透镜具有正屈折力;第六透镜,第六透镜具有负屈折力;第一透镜至第六透镜中相邻两个透镜之间具有空气间隔;其中,平衡低频性能时,摄像镜头的光圈值fno2满足:fno2》2.2;第一透镜的被摄物侧面至成像面的轴上距离ttl与摄像镜头的有效焦距f之间满足:ttl/f《1.2。
73.通过合理约束各透镜的屈折力,有利于光线的平稳过渡,有利于保证最终的成像质量。通过控制平衡低频性能时,摄像镜头的光圈值fno2在2.2以上,是为了适当的降低低频性能,拉近高低频性能差值。通过约束第一透镜的被摄物侧面至成像面的轴上距离ttl与摄像镜头的有效焦距f之间的比值,可以提升摄像镜头的灵活性,能够有效平衡视场角和体积,有利于扩展摄像镜头的应用范围。本技术提供的为一种大像面、大光圈、超薄化的六片式摄像镜头,利用双光圈的优化方式能够有效的拉近高低频性能,满足算法需求和高端智能手机上主摄像头的应用需求。
74.在本实施例中,摄像镜头的最大视场角fov满足:80
°
<fov<90
°
。通过合理约束摄像镜头的最大视场角fov,有利于获得较大的视场范围,能够提高摄像镜头对物方信息的捕捉能力。优选地,89
°
<fov<90
°
。
75.在本实施例中,第二透镜的被摄物侧面为凹面;平衡高频性能时,摄像镜头的光圈值fno1满足:fno1《2.0。通过控制平衡高频性能时,摄像镜头的光圈值fno1在2.0以下,有利于获得更大的进光量,提高成像面的照度与芯片的响应,从而降低系统的功耗。
76.在本实施例中,第二透镜的被摄物侧面的曲率半径r3与摄像镜头的有效焦距f之间满足:-3.5<r3/f<-1.5。满足此条件式,可以合理分配系统的屈折力,平衡系统前端光学透镜和后端光学透镜产生的像散量,使得系统具有良好的成像质量。优选地,-3.3<r3/f
<-1.9。
77.在本实施例中,第三透镜的有效焦距f3与摄像镜头的有效焦距f之间满足:10.0<f3/f<17.0。满足此条件式,能够对光学系统后面透镜产生的剩余球差进行平衡,使得轴上的像差较小,可以获得良好的成像质量。优选地,10.0<f3/f<16.8。
78.在本实施例中,第二透镜的有效焦距f2与第三透镜的有效焦距f3之间满足:-6.0<f3/f2<-3.0。满足此条件式,能够合理约束第二透镜和第三透镜的有效焦距的比值,从而合理控制两个透镜的场曲贡献量,使得其平衡在合理的状态。优选地,-5.6<f3/f2<-3.2。
79.在本实施例中,第四透镜的有效焦距f4与第五透镜的有效焦距f5之间满足:-4.0<f4/f5<-3.0。满足此条件式,可以减小光线的偏转角,提高摄像镜头的成像质量。优选地,-3.8<f4/f5<-3.1。
80.在本实施例中,第三透镜的被摄物侧面的曲率半径r5与摄像镜头的有效焦距f之间满足:2.5<r5/f<7.0。满足此条件式,能够有效的控制摄像镜头的象散量,进而可以改善轴外视场的成像质量。优选地,2.8<r5/f<6.8。
81.在本实施例中,第六透镜的像侧面的曲率半径r12与第六透镜的有效焦距f6之间满足:1.0<r12/f6<2.0。满足此条件式,能够控制三阶彗差在合理的范围内,进而能平衡前端光学透镜产生的彗差量,使得摄像镜头具有良好的成像质量。优选地,1.4<r12/f6<1.6。
82.在本实施例中,第二透镜在光轴上的中心厚度ct2与第二透镜和第三透镜在光轴上的空气间隔t23之间满足:1.0<t23/ct2<3.0。满足此条件式,可以有效的限制第二透镜的位置,有利于实现摄像镜头结构的紧凑性,同时有利于矫正轴外像差,提升摄像镜头整体像质。优选地,1.1<t23/ct2<2.8。
83.在本实施例中,第三透镜的像侧面和光轴的交点至第三透镜的像侧面的有效半径顶点之间的轴上距离sag32与第六透镜的被摄物侧面和光轴的交点至第六透镜的被摄物侧面的有效半径顶点之间的轴上距离sag61之间满足:4.0<sag61/sag32<5.5。满足此条件式,有利于降低第三透镜和第六透镜的敏感度,方便透镜的加工成型。优选地,4.1<sag61/sag32<5.2。
84.在本实施例中,第四透镜的被摄物侧面和光轴的交点至第四透镜的被摄物侧面的有效半径顶点之间的轴上距离sag41与第六透镜的像侧面和光轴的交点至第六透镜的像侧面的有效半径顶点之间的轴上距离sag62之间满足:2.0<sag62/sag41<3.0。满足此条件式,可以有效地避免第四透镜和第六透镜产生的鬼像,有利于降低系统的鬼像风险。优选地,2.2<sag62/sag41<2.7。
85.在本实施例中,第二透镜与第三透镜的组合焦距f23与摄像镜头的有效焦距f之间满足:-4.5<f23/f<-3.5。满足此条件式,能够合理的控制屈折力的贡献范围,同时合理的控制其球差的贡献率,使得其能合理的平衡透镜的屈折力。优选地,-4.5<f23/f<-3.6。
86.可选地上述摄像镜头还可包括用于校正色彩偏差的滤光片或用于保护位于成像面上的感光元件的保护玻璃。
87.在本技术中的摄像镜头可采用多片镜片,例如上述的六片。通过合理分配各透镜的屈折力、面形、各透镜的中心厚度以及各透镜之间的轴上距离等,使得摄像镜头更有利于
生产加工并且可适用于智能手机等便携式电子设备。上述的摄像镜头还具有超薄、成像质量佳的优点,能够满足智能电子产品微型化的需求。
88.在本技术中,各透镜的镜面中的至少一个为非球面镜面。非球面透镜的特点是:从透镜中心到透镜周边,曲率是连续变化的。与从透镜中心到透镜周边具有恒定曲率的球面透镜不同,非球面透镜具有更佳的曲率半径特性,具有改善歪曲像差及改善像散像差的优点。采用非球面透镜后,能够尽可能地消除在成像的时候出现的像差,从而改善成像质量。
89.然而,本领域技术人员应当理解,在未背离本技术要求保护的技术方案的情况下,可改变构成摄像镜头的透镜数量,来获得本说明书中描述的各个结果和优点。例如,虽然在实施方式中以六片透镜为例进行了描述,但是摄像镜头不限于包括六片透镜。如需要,该摄像镜头还可包括其它数量的透镜。
90.下面参照附图进一步描述可适用于上述实施方式的摄像镜头的具体面型、参数的举例。
91.需要说明的是,下述的例子一至例子六中的任何一个例子均适用于本技术的所有实施例。
92.例子一
93.如图1至图5所示,描述了本技术例子一的摄像镜头。图1示出了例子一的摄像镜头结构的示意图。
94.如图1所示,摄像镜头由被摄物侧至像侧依序包括:光阑sto、第一透镜e1、第二透镜e2、第三透镜e3、第四透镜e4、第五透镜e5、第六透镜e6、滤光片e7和成像面s15。
95.第一透镜e1具有正屈折力,第一透镜的被摄物侧面s1为凸面,第一透镜的像侧面s2为凹面。第二透镜e2具负屈折力,第二透镜的被摄物侧面s3为凹面,第二透镜的像侧面s4为凹面。第三透镜e3具有正屈折力,第三透镜的被摄物侧面s5为凸面,第三透镜的像侧面s6为凹面。第四透镜e4具有负屈折力,第四透镜的被摄物侧面s7为凸面,第四透镜的像侧面s8为凹面。第五透镜e5具有正屈折力,第五透镜的被摄物侧面s9为凸面,第五透镜的像侧面s10为凸面。第六透镜e6具有负屈折力,第六透镜的被摄物侧面s11为凹面,第六透镜的像侧面s12为凸面。滤光片e7具有滤光片的被摄物侧面s13和滤光片的像侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
96.在本例子中,摄像镜头的总有效焦距f为5.16mm,摄像镜头的最大半视场角semi-fov为44.8
°
摄像镜头的总长ttl为5.87mm以及像高imgh为5.27mm。
97.表1示出了例子一的摄像镜头的基本结构参数表,其中,曲率半径、厚度/距离的单位均为毫米(mm)。
98.[0099][0100]
表1
[0101]
在例子一中,第一透镜e1至第六透镜e6中的任意一个透镜的被摄物侧面和像侧面均为非球面,各非球面透镜的面型可利用但不限于以下非球面公式进行限定:
[0102][0103]
其中,x为非球面沿光轴方向在高度为h的位置时,距非球面顶点的距离矢高;c为非球面的近轴曲率,c=1/r(即,近轴曲率c为上表1中曲率半径r的倒数);k为圆锥系数;ai是非球面第i-th阶的修正系数。下表2给出了可用于例子一中各非球面镜面s1-s12的高次项系数a4、a6、a8、a10、a12、a14、a16、a18、a20、a22、a24、a26、a28、a30。
[0104]
[0105][0106]
表2
[0107]
图2示出了例子一的摄像镜头的轴上色差曲线,其表示不同波长的光线经由摄像镜头后的会聚焦点偏离。图3示出了例子一的摄像镜头的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图4示出了例子一的摄像镜头的畸变曲线,其表示不同视场角对应的畸变大小值。图5示出了例子一的摄像镜头的倍率色差曲线,其表示光线经由摄像镜头后在成像面上的不同像高的偏差。
[0108]
根据图2至图5可知,例子一所给出的摄像镜头能够实现良好的成像品质。
[0109]
例子二
[0110]
如图6至图10所示,描述了本技术例子二的摄像镜头。在本例子及以下例子中,为简洁起见,将省略部分与例子一相似的描述。图6示出了例子二的摄像镜头结构的示意图。
[0111]
如图6所示,摄像镜头由被摄物侧至像侧依序包括:光阑sto、第一透镜e1、第二透镜e2、第三透镜e3、第四透镜e4、第五透镜e5、第六透镜e6、滤光片e7和成像面s15。
[0112]
第一透镜e1具有正屈折力,第一透镜的被摄物侧面s1为凸面,第一透镜的像侧面s2为凹面。第二透镜e2具负屈折力,第二透镜的被摄物侧面s3为凹面,第二透镜的像侧面s4为凹面。第三透镜e3具有正屈折力,第三透镜的被摄物侧面s5为凸面,第三透镜的像侧面s6为凹面。第四透镜e4具有负屈折力,第四透镜的被摄物侧面s7为凸面,第四透镜的像侧面s8为凹面。第五透镜e5具有正屈折力,第五透镜的被摄物侧面s9为凸面,第五透镜的像侧面s10为凸面。第六透镜e6具有负屈折力,第六透镜的被摄物侧面s11为凹面,第六透镜的像侧面s12为凸面。滤光片e7具有滤光片的被摄物侧面s13和滤光片的像侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
[0113]
在本例子中,摄像镜头的总有效焦距f为5.17mm,摄像镜头的最大半视场角semi-fov为44.9
°
摄像镜头的总长ttl为5.87mm以及像高imgh为5.27mm。
[0114]
表3示出了例子二的摄像镜头的基本结构参数表,其中,曲率半径、厚度/距离的单位均为毫米(mm)。
[0115]
[0116][0117]
表3
[0118]
表4示出了可用于例子二中各非球面镜面的高次项系数,其中,各非球面面型可由上述例子一中给出的公式(1)限定。
[0119]
面号a4a6a8a10a12a14a16s1-1.7931e-02-1.1609e-02-4.6626e-03-1.0719e-03-1.1640e-045.6156e-05-5.1408e-06s2-8.1805e-02-4.1313e-03-3.2699e-048.7260e-052.0970e-043.5023e-043.3464e-04s34.8378e-021.9358e-02-2.7481e-045.9899e-04-3.4536e-05-4.7324e-061.5643e-04s47.4909e-021.6297e-02-2.6169e-043.2943e-047.2049e-05-1.3112e-05-8.9931e-06s51.6681e-01-1.2038e-022.3708e-043.2157e-03-2.0176e-039.8104e-04-3.5457e-04s62.1148e-012.0635e-02-2.9824e-022.1278e-02-1.0443e-024.3699e-03-1.2990e-03s75.1477e-011.4039e-02-1.8266e-023.8266e-02-1.5353e-022.9880e-038.6816e-03s8-1.6665e-021.5366e-011.1310e-012.8157e-04-9.4371e-037.1624e-038.6882e-03s9-9.2375e-037.4122e-011.6595e-01-1.1117e-01-9.3487e-021.2253e-025.4672e-02s106.9625e-013.2994e-01-3.9543e-011.6972e-01-1.6891e-014.9680e-021.1123e-02s11-1.3802e+00-6.2080e-01-3.3776e-01-2.3684e-011.1793e-023.1645e-027.1994e-02s12-5.4042e-011.8762e-011.4258e-01-2.1462e-01-1.0820e-02-3.6245e-022.9025e-02面号a18a20a22a24a26a28a30s1-1.5579e-05-1.7690e-050.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s21.7009e-043.5632e-050.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s31.3151e-044.9425e-050.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s42.9165e-062.1795e-060.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s51.4143e-04-3.9382e-050.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s63.0757e-04-2.9047e-06-6.4275e-080.0000e+000.0000e+000.0000e+000.0000e+00s7-7.8862e-035.7996e-03-2.4946e-039.5780e-04-2.0964e-040.0000e+000.0000e+00s83.8491e-04-2.2882e-048.0013e-048.5048e-04-1.4040e-04-1.8973e-041.3875e-04s91.5917e-02-7.7991e-03-4.2179e-032.2526e-031.9367e-03-4.4906e-04-5.3110e-04s10-1.1270e-024.1750e-02-1.3206e-023.1264e-04-3.3332e-034.3720e-04-8.1658e-04s114.8849e-03-2.0934e-02-1.4748e-022.7536e-037.5862e-034.8515e-039.2538e-04s12-1.8545e-029.5579e-035.4166e-03-9.1976e-035.1848e-034.2834e-030.0000e+00
[0120]
表4
[0121]
图7示出了例子二的摄像镜头的轴上色差曲线,其表示不同波长的光线经由摄像
镜头后的会聚焦点偏离。图8示出了例子二的摄像镜头的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图9示出了例子二的摄像镜头的畸变曲线,其表示不同视场角对应的畸变大小值。图10示出了例子二的摄像镜头的倍率色差曲线,其表示光线经由摄像镜头后在成像面上的不同像高的偏差。
[0122]
根据图7至图10可知,例子二所给出的摄像镜头能够实现良好的成像品质。
[0123]
例子三
[0124]
如图11至图15所示,描述了本技术例子三的摄像镜头。图11示出了例子三的摄像镜头结构的示意图。
[0125]
如图11所示,摄像镜头由被摄物侧至像侧依序包括:光阑sto、第一透镜e1、第二透镜e2、第三透镜e3、第四透镜e4、第五透镜e5、第六透镜e6、滤光片e7和成像面s15。
[0126]
第一透镜e1具有正屈折力,第一透镜的被摄物侧面s1为凸面,第一透镜的像侧面s2为凹面。第二透镜e2具负屈折力,第二透镜的被摄物侧面s3为凹面,第二透镜的像侧面s4为凸面。第三透镜e3具有正屈折力,第三透镜的被摄物侧面s5为凸面,第三透镜的像侧面s6为凹面。第四透镜e4具有负屈折力,第四透镜的被摄物侧面s7为凸面,第四透镜的像侧面s8为凹面。第五透镜e5具有正屈折力,第五透镜的被摄物侧面s9为凸面,第五透镜的像侧面s10为凸面。第六透镜e6具有负屈折力,第六透镜的被摄物侧面s11为凹面,第六透镜的像侧面s12为凸面。滤光片e7具有滤光片的被摄物侧面s13和滤光片的像侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
[0127]
在本例子中,摄像镜头的总有效焦距f为5.17mm,摄像镜头的最大半视场角semi-fov为44.9
°
摄像镜头的总长ttl为5.87mm以及像高imgh为5.27mm。
[0128]
表5示出了例子三的摄像镜头的基本结构参数表,其中,曲率半径、厚度/距离的单位均为毫米(mm)。
[0129][0130]
[0131]
表5
[0132]
表6示出了可用于例子三中各非球面镜面的高次项系数,其中,各非球面面型可由上述例子一中给出的公式(1)限定。
[0133]
面号a4a6a8a10a12a14a16s1-1.7509e-02-1.1867e-02-4.8308e-03-1.2704e-03-1.7779e-046.3129e-054.2574e-05s2-8.2431e-02-5.2237e-031.7549e-044.1312e-043.7932e-043.0525e-041.6380e-04s34.8291e-022.0404e-022.6558e-048.0543e-041.1725e-045.9733e-059.5770e-05s47.7403e-021.6129e-02-8.3358e-054.0749e-049.4604e-059.0002e-06-9.7712e-06s5-1.3992e-01-4.3219e-03-1.7619e-032.8021e-041.7934e-041.0184e-041.6434e-05s6-2.2497e-01-6.3980e-03-6.9689e-052.2574e-031.0092e-035.1478e-041.3806e-04s7-7.1833e-013.0929e-02-2.3053e-026.5933e-034.6468e-042.7468e-03-2.0301e-05s8-1.3468e+002.9572e-01-5.7957e-025.9670e-03-5.6848e-035.4269e-03-1.9486e-03s9-2.8178e+004.9768e-013.2439e-02-3.9663e-02-1.0482e-022.6050e-02-1.3097e-02s10-3.8347e-01-2.4118e-017.6085e-02-1.4608e-036.4672e-031.8881e-02-4.2068e-03s115.8549e+00-9.9496e-012.0114e-012.3956e-03-4.5812e-023.1278e-02-1.1111e-02s121.1363e+00-6.7833e-021.6650e-01-7.3205e-025.3942e-034.0702e-03-2.5934e-03面号a18a20a22a24a26a28a30s11.4614e-05-3.1204e-060.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s24.1242e-05-2.0420e-060.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s35.4504e-051.2935e-050.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s4-1.8108e-06-3.9833e-060.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s5-1.4590e-06-2.1688e-060.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s63.2620e-05-9.2078e-06-1.1329e-050.0000e+000.0000e+000.0000e+000.0000e+00s7-2.1463e-04-5.1192e-04-2.6242e-04-1.2033e-04-3.4937e-050.0000e+000.0000e+00s81.3949e-04-2.7395e-042.8703e-04-5.3229e-05-3.7516e-05-1.1027e-051.3188e-05s9-4.0064e-061.7616e-036.4229e-05-5.5641e-041.1784e-041.2975e-04-7.1763e-05s106.9097e-03-2.3550e-03-2.2521e-033.6162e-04-5.9119e-04-2.4036e-05-9.9955e-05s11-4.2544e-034.1943e-032.5714e-04-2.1808e-031.8690e-03-7.7801e-041.5767e-04s128.1396e-04-2.5123e-03-3.4740e-049.8133e-051.5849e-03-4.5100e-040.0000e+00
[0134]
表6
[0135]
图12示出了例子三的摄像镜头的轴上色差曲线,其表示不同波长的光线经由摄像镜头后的会聚焦点偏离。图13示出了例子三的摄像镜头的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图14示出了例子三的摄像镜头的畸变曲线,其表示不同视场角对应的畸变大小值。图15示出了例子三的摄像镜头的倍率色差曲线,其表示光线经由摄像镜头后在成像面上的不同像高的偏差。
[0136]
根据图12至图15可知,例子三所给出的摄像镜头能够实现良好的成像品质。
[0137]
例子四
[0138]
如图16至图20所示,描述了本技术例子四的摄像镜头。图16示出了例子四的摄像镜头结构的示意图。
[0139]
如图16所示,摄像镜头由被摄物侧至像侧依序包括:光阑sto、第一透镜e1、第二透镜e2、第三透镜e3、第四透镜e4、第五透镜e5、第六透镜e6、滤光片e7和成像面s15。
[0140]
第一透镜e1具有正屈折力,第一透镜的被摄物侧面s1为凸面,第一透镜的像侧面s2为凹面。第二透镜e2具负屈折力,第二透镜的被摄物侧面s3为凹面,第二透镜的像侧面s4为凹面。第三透镜e3具有正屈折力,第三透镜的被摄物侧面s5为凸面,第三透镜的像侧面s6
为凸面。第四透镜e4具有负屈折力,第四透镜的被摄物侧面s7为凸面,第四透镜的像侧面s8为凹面。第五透镜e5具有正屈折力,第五透镜的被摄物侧面s9为凸面,第五透镜的像侧面s10为凸面。第六透镜e6具有负屈折力,第六透镜的被摄物侧面s11为凹面,第六透镜的像侧面s12为凸面。滤光片e7具有滤光片的被摄物侧面s13和滤光片的像侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
[0141]
在本例子中,摄像镜头的总有效焦距f为5.16mm,摄像镜头的最大半视场角semi-fov为44.8
°
摄像镜头的总长ttl为5.87mm以及像高imgh为5.27mm。
[0142]
表7示出了例子四的摄像镜头的基本结构参数表,其中,曲率半径、厚度/距离的单位均为毫米(mm)。
[0143][0144]
表7
[0145]
表8示出了可用于例子四中各非球面镜面的高次项系数,其中,各非球面面型可由上述例子一中给出的公式(1)限定。
[0146]
面号a4a6a8a10a12a14a16s1-1.8494e-02-1.1708e-02-4.6104e-03-1.1251e-03-1.3109e-047.8995e-054.5091e-05s2-8.2960e-02-3.0031e-03-3.3983e-042.2103e-044.2839e-043.6332e-041.9903e-04s34.7325e-022.0645e-02-2.9016e-046.9153e-042.1234e-041.4339e-041.7534e-04s47.4796e-021.6562e-02-2.3044e-043.5951e-047.4415e-05-3.4985e-06-1.4633e-05s5-1.3587e-01-4.0623e-03-1.5162e-033.9728e-041.8936e-041.3826e-049.3168e-06s6-2.2039e-01-7.1969e-031.4625e-042.1573e-031.0351e-035.4223e-041.6339e-04s7-7.2331e-012.8971e-02-2.1538e-026.4153e-032.2758e-042.9072e-033.4546e-05s8-1.3497e+002.9588e-01-5.7382e-025.9384e-03-5.7978e-035.5371e-03-2.0717e-03s9-2.8171e+004.9792e-013.2294e-02-3.9610e-02-1.0640e-022.6052e-02-1.3022e-02s10-3.8444e-01-2.4202e-017.7534e-02-2.8862e-036.7319e-031.8747e-02-3.7033e-03s115.8549e+00-9.9543e-012.0173e-013.0392e-03-4.6008e-023.1165e-02-1.1353e-02s121.1460e+00-7.0290e-021.6824e-01-7.1655e-025.1258e-034.4691e-03-3.0818e-03
面号a18a20a22a24a26a28a30s11.6411e-05-2.3504e-060.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s25.6716e-052.7225e-060.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s38.9561e-052.5138e-050.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s42.0180e-06-3.5809e-060.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s59.6796e-06-6.1441e-060.0000e+000.0000e+000.0000e+000.0000e+000.0000e+00s64.6216e-051.2969e-06-1.0458e-050.0000e+000.0000e+000.0000e+000.0000e+00s7-4.6625e-05-4.4406e-04-1.7564e-04-1.0935e-04-1.1698e-050.0000e+000.0000e+00s82.4836e-04-2.7260e-043.0314e-04-8.1699e-05-1.1275e-05-1.4551e-058.3201e-06s98.3374e-051.8146e-035.2376e-05-5.9346e-041.0164e-041.5163e-04-7.0046e-05s106.9143e-03-2.2629e-03-2.3013e-034.2633e-04-4.9309e-041.2699e-05-1.1438e-04s11-4.4251e-034.3607e-031.6033e-04-2.4531e-031.9069e-03-8.0438e-041.0696e-04s121.2231e-03-2.6089e-03-2.5099e-046.9109e-051.5724e-03-5.7304e-040.0000e+00
[0147]
表8
[0148]
图17示出了例子四的摄像镜头的轴上色差曲线,其表示不同波长的光线经由摄像镜头后的会聚焦点偏离。图18示出了例子四的摄像镜头的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图19示出了例子四的摄像镜头的畸变曲线,其表示不同视场角对应的畸变大小值。图20示出了例子四的摄像镜头的倍率色差曲线,其表示光线经由摄像镜头后在成像面上的不同像高的偏差。
[0149]
根据图17至图20可知,例子四所给出的摄像镜头能够实现良好的成像品质。
[0150]
例子五
[0151]
如图21至图25所示,描述了本技术例子五的摄像镜头。图21示出了例子五的摄像镜头结构的示意图。
[0152]
如图21所示,摄像镜头由被摄物侧至像侧依序包括:光阑sto、第一透镜e1、第二透镜e2、第三透镜e3、第四透镜e4、第五透镜e5、第六透镜e6、滤光片e7和成像面s15。
[0153]
第一透镜e1具有正屈折力,第一透镜的被摄物侧面s1为凸面,第一透镜的像侧面s2为凹面。第二透镜e2具负屈折力,第二透镜的被摄物侧面s3为凹面,第二透镜的像侧面s4为凹面。第三透镜e3具有正屈折力,第三透镜的被摄物侧面s5为凸面,第三透镜的像侧面s6为凹面。第四透镜e4具有负屈折力,第四透镜的被摄物侧面s7为凸面,第四透镜的像侧面s8为凹面。第五透镜e5具有正屈折力,第五透镜的被摄物侧面s9为凸面,第五透镜的像侧面s10为凸面。第六透镜e6具有负屈折力,第六透镜的被摄物侧面s11为凹面,第六透镜的像侧面s12为凸面。滤光片e7具有滤光片的被摄物侧面s13和滤光片的像侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
[0154]
在本例子中,摄像镜头的总有效焦距f为5.16mm,摄像镜头的最大半视场角semi-fov为44.9
°
摄像镜头的总长ttl为5.87mm以及像高imgh为5.27mm。
[0155]
表9示出了例子五的摄像镜头的基本结构参数表,其中,曲率半径、厚度/距离的单位均为毫米(mm)。
[0156][0157]
表9
[0158]
表10示出了可用于例子五中各非球面镜面的高次项系数,其中,各非球面面型可由上述例子一中给出的公式(1)限定。
[0159]
[0160][0161]
表10
[0162]
图22示出了例子五的摄像镜头的轴上色差曲线,其表示不同波长的光线经由摄像镜头后的会聚焦点偏离。图23示出了例子五的摄像镜头的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图24示出了例子五的摄像镜头的畸变曲线,其表示不同视场角对应的畸变大小值。图25示出了例子五的摄像镜头的倍率色差曲线,其表示光线经由摄像镜头后在成像面上的不同像高的偏差。
[0163]
根据图22至图25可知,例子五所给出的摄像镜头能够实现良好的成像品质。
[0164]
例子六
[0165]
如图26至图30所示,描述了本技术例子六的摄像镜头。图26示出了例子六的摄像镜头结构的示意图。
[0166]
如图26所示,摄像镜头由被摄物侧至像侧依序包括:光阑sto、第一透镜e1、第二透镜e2、第三透镜e3、第四透镜e4、第五透镜e5、第六透镜e6、滤光片e7和成像面s15。
[0167]
第一透镜e1具有正屈折力,第一透镜的被摄物侧面s1为凸面,第一透镜的像侧面s2为凹面。第二透镜e2具负屈折力,第二透镜的被摄物侧面s3为凹面,第二透镜的像侧面s4为凹面。第三透镜e3具有正屈折力,第三透镜的被摄物侧面s5为凸面,第三透镜的像侧面s6为凹面。第四透镜e4具有负屈折力,第四透镜的被摄物侧面s7为凸面,第四透镜的像侧面s8为凹面。第五透镜e5具有正屈折力,第五透镜的被摄物侧面s9为凸面,第五透镜的像侧面s10为凸面。第六透镜e6具有负屈折力,第六透镜的被摄物侧面s11为凹面,第六透镜的像侧面s12为凸面。滤光片e7具有滤光片的被摄物侧面s13和滤光片的像侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
[0168]
在本例子中,摄像镜头的总有效焦距f为5.16mm,摄像镜头的最大半视场角semi-fov为44.8
°
摄像镜头的总长ttl为5.87mm以及像高imgh为5.27mm。
[0169]
表11示出了例子六的摄像镜头的基本结构参数表,其中,曲率半径、厚度/距离的
单位均为毫米(mm)。
[0170][0171]
表11
[0172]
表12示出了可用于例子六中各非球面镜面的高次项系数,其中,各非球面面型可由上述例子一中给出的公式(1)限定。
[0173]
[0174][0175]
表12
[0176]
图27示出了例子六的摄像镜头的轴上色差曲线,其表示不同波长的光线经由摄像镜头后的会聚焦点偏离。图28示出了例子六的摄像镜头的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图29示出了例子六的摄像镜头的畸变曲线,其表示不同视场角对应的畸变大小值。图30示出了例子六的摄像镜头的倍率色差曲线,其表示光线经由摄像镜头后在成像面上的不同像高的偏差。
[0177]
根据图27至图30可知,例子六所给出的摄像镜头能够实现良好的成像品质。
[0178]
综上,例子一至例子六分别满足表13中所示的关系。
[0179]
条件式/例子123456fov89.789.989.889.789.889.7fno11.901.901.911.921.931.99fno22.252.352.362.332.312.40ttl/f1.141.141.141.141.141.14r3/f-3.23-3.22-1.96-3.19-3.02-3.05f3/f11.5813.9615.3410.1016.7112.81f3/f2-3.83-4.63-4.77-3.29-5.58-4.18f4/f5-3.38-3.61-3.51-3.19-3.70-3.56r5/f4.082.932.926.702.812.93r12/f61.421.411.421.421.421.58t23/ct21.222.751.161.241.171.13sag61/sag324.545.075.024.195.194.74sag62/sag412.382.622.452.292.602.23f23/f-4.11-3.85-4.07-4.47-3.64-4.03
[0180]
表13
[0181]
表14给出了例子一至例子六的摄像镜头的有效焦距f,各透镜的有效焦距f1至f6。
[0182]
[0183][0184]
表14
[0185]
本技术还提供一种成像装置,其电子感光元件可以是感光耦合元件(ccd)或互补性氧化金属半导体元件(cmos)。成像装置可以是诸如数码相机的独立成像设备,也可以是集成在诸如手机等移动电子设备上的成像模块。该成像装置装配有以上描述的摄像镜头。
[0186]
显然,上述所描述的实施例仅仅是本实用新型一部分的实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
[0187]
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、工作、器件、组件和/或它们的组合。
[0188]
需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
[0189]
以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1