一种遥控调节手术无影灯的制作方法
1.本发明涉及一种手术无影灯,具体涉及一种遥控调节手术无影灯。
背景技术:
2.现有手术室无影灯的调节,需要依靠手术室巡回护士手动操作来完成,或者由手术医生术中使用无菌无影灯灯柄来完成,实现对灯光的调节,而在手术进行中随着术中术野范围扩大、手术部位变化、手术体位改变也需要随时调节无影灯照射角度来满足手术照明需要,前者需要巡回护士与手术医生有良好配合才能达到最佳跟随效果,临床工作中常常出现因为无影灯位置调节不到位而出现照明效果不佳的情况,甚至出现调节无影灯时由于巡回护士身体靠无菌区域而出现污染手术区域或器械等意外情况,严重影响手术顺利进行,还增加术中各项材料支出。另外在实际中无影灯位置偏高,而有时手术中操作无影灯的巡回护士或手术医生身高偏矮,这就造成:一是巡回护士或手术医生操作不方便,二是影响无影灯位置准确调整。
技术实现要素:
3.本发明目的在于:提供一种遥控调节手术无影灯,它能够克服现有手术室灯光调节时医生需要灯光位置与调节人员所调节的位置之间的差异,导致存在影响手术进程的问题。
4.本发明的技术方案是:一种遥控调节手术无影灯,包括灯架、无影灯罩,其特征是:灯架包括有安装连接装置、转向调节装置、旋转臂,安装连接装置包括安装基板、垂直连接板、导轨,安装基板呈水平设置,安装基板上面用于连接到楼板基座,安装基板下面连接垂直连接板,垂直连接板上安装导轨;转向调节装置包括第一伺服电机,第二伺服电机,第一伺服电机通过滑块安装在前述导轨上,导轨竖直固定安装在垂直连接板上,第一伺服电机一侧垂直方向安装有第二伺服电机,第二伺服电机安装连接在第一伺服电机上的其中一块滑块上,第二伺服电机输出轴上连接有齿轮,齿轮与安装在垂直安装板上的齿条相啮合,齿条固定安装在垂直连接板上,实现驱动第一伺服电机上下移动;转向调节装置还包括旋转杆,第一伺服电机的输出轴通过减速器连接旋转杆,旋转杆上设有与旋转臂座匹配销键,旋转杆穿过定位座与旋转臂的旋转臂座连接;旋转杆与定位座活连接,定位座固定安装在垂直连接板上;旋转臂包含有,上旋转臂的上端与定位座的下端活连接,上旋转臂包括第一旋转臂、第二旋转臂、第三旋转臂、柔性杆、第三伺服电机、第四伺服电机 第五伺服电机、第六伺服电机、第七伺服电机,第一旋转臂的一端的旋转臂座套接在旋转杆上,第一旋转臂另一端通过旋转轴与第二旋转臂转动连接,旋转轴上端还连接第三伺服电机的输出轴上,第三伺服电机机身固定安装在第一旋转臂的远端上,第三伺服电机的输出轴连接旋转轴,旋转轴与第二旋转臂固定连接;第二旋转臂远端与第三旋转臂一端转动连接,第四伺服电机固定安装在第二旋转臂远端,第四伺服电机的输出轴连接旋转轴,旋转轴与第三旋转臂固定连接,第四伺服电机用于驱动第三旋转臂旋转;第三旋转臂另一端固定连接第五伺服电机;
第五伺服电机连击转向架,转向架上固安装有第六伺服电机,第六伺服电机输出轴连击柔性杆,柔性杆的末端连接第七伺服电机,第七伺服电机输出轴固定连接无影灯罩;第一旋转臂的旋转臂座设有竖直键槽,以及径向凹槽;下旋转臂包括左第一旋转臂、左第二旋转臂、左第三旋转臂、左柔性杆、左第三伺服电机、左第四伺服电机、左第五伺服电机、左第六伺服电机、左第七伺服电机,左第一旋转臂的一端的下旋转臂座套接在旋转杆上,左第一旋转臂远端通过旋转轴与左第二旋转臂转动连接,旋转轴上端还连接左第三伺服电机,左第三伺服电机机身固定安装在左第一旋转臂的远端,左第三伺服电机的输出轴连接旋转轴,旋转轴与左第二旋转臂固定连接;左第二旋转臂远端与左第三旋转臂一端活连接,左第四伺服电机固定安装在左第二旋转臂远端,用于驱动左第三旋转臂旋转;左第三旋转臂另一端固定连接左第五伺服电机;左第五伺服电机输出轴连接左转向架,左转向架上固安装有左第六伺服电机,左第六伺服电机输出轴连击左柔性杆,左柔性杆的末端连接左第七伺服电机,左第七伺服电机输出轴固定连接左无影灯罩;左第一旋转臂的下旋转臂座设有左竖直键槽,以及左径向凹槽,上旋转臂座的下端与下旋转臂座的上端采用旋转连接。
5.进一步的所述一种遥控调节手术无影灯,其特征是:所述的上旋转臂座的下端与下旋转臂座的上端采用旋转连接,是采用扣环连接,扣环设置上沿、下沿为内凸沿,上旋转臂座的下端开有与扣环上沿内凸沿相匹配凹槽,下旋转臂座的上端开有与扣环下沿内凸沿相匹配凹槽,安装时将扣环卡上沿内凸沿入上旋转臂座的下端凹槽,将扣环卡下沿内凸沿入下旋转臂座的下端凹槽。
6.进一步的所述一种遥控调节手术无影灯,其特征是:所述的第一旋转臂的旋转臂座下接触面与左第一旋转臂的旋转臂座上接触面上均对应开有圆环槽,圆环槽内沿圆周均匀设有滚珠槽,滚珠槽内设有滚珠以减少第一旋转臂与左第一旋转臂之间旋转摩擦。
7.进一步的所述一种遥控调节手术无影灯,其特征是:还包括有控制器,控制器包括控制电路ic、输入端、输出端、遥控接受器、遥控器,遥控接收器经输入端电连接控制器ic,控制器ic经输出端电连接控制第一伺服电机,控制器ic经输出端电连第二伺服电机,以控制旋转杆的上下移动实现对上旋转臂、下旋转臂转动选择;控制器ic经输出端电连接控制第三伺服电机,实现第一旋转臂与第二旋转臂间的水平旋转角度调节;控制器ic经输出端电连接控制第四伺服电机,实现第二旋转臂与第三旋转臂间的水平旋转角度调节;控制器ic经输出端电连接控制第五伺服电机,实现第三旋转臂与柔性杆间的垂直方向旋转角度调节,控制器ic经输出端电连接控制第六伺服电机,实现第三旋转臂与柔性杆间的水平方向旋转角度调节,控制器ic经输出端电连接控制第七伺服电机,实现无影灯罩与柔性杆间的旋转角度调节;控制器ic经输出端电连接控制左第三伺服电机,实现左第一旋转臂与左第二旋转臂间的水平旋转角度调节;控制器ic经输出端电连接控制左第四伺服电机,实现左第二旋转臂与左第三旋转臂间的旋转角度调节,控制器ic经输出端电连接控制左第五伺服电机,实现左第三旋转臂与左柔性杆间的垂直方向旋转角度调节,控制器ic经输出端电连接控制左第六伺服电机,实现左第三旋转臂与左柔性杆间的水平方向旋转角度调节,控制器ic经输出端电连接控制左第七伺服电机,实现左无影灯罩与左柔性杆间的旋转角度调节,遥控器遥控完成上述动作。
8.进一步的所述一种遥控调节手术无影灯,其特征是:所述的控制器ic连接有摄影记忆控制装置和手术追踪装置,能实时记录手术医生用灯习惯,能比对记忆,实现无影灯位
置快速调节。
9.使用时通过操作遥控器,驱动控制器接通第二伺服电机驱动第一伺服电机上下移动实现选择驱动上旋转臂或下旋转臂,之后启动第一伺服电机驱动上旋转臂或下旋转臂使其旋转到所需大致相应位置,之后逐一遥控驱动第三伺服电机使第一旋转臂与第二旋转臂夹角符合所需要求,遥控驱动第四伺服电机使第二旋转臂与第三旋转臂夹角符合所需要求,遥控驱动左第三伺服电机使左第一旋转臂与左第二旋转臂夹角符合所需要求,遥控驱动左第四伺服电机使左第二旋转臂与左第三旋转臂夹角到达所需位置,遥控驱动第五伺服电机使第三旋转臂与柔性杆垂直方向旋转角都到达所需位置,遥控驱动左第五伺服电机使左第三旋转臂与左柔性杆垂直方向旋转角都到达所需位置,遥控驱动第六伺服电机使第三旋转臂与柔性杆水平方向旋转角都到达所需位置,遥控驱动左第六伺服电机使左第三旋转臂与左柔性杆水平方向旋转角都到达所需位置,遥控驱动第七伺服电机使左无影灯罩水平方向旋转角都到达所需位置,再手动调整柔性杆、下柔性杆形状位置,最后调节无影灯罩以满足实时灯光需要。
10.本发明有益效果在于:提供一种遥控调节手术无影灯,它能灵活的遥控实现无影灯位置立体空间中调节,使手术灯光调节变得非常的便利,它克服了现有手术室灯光调节依赖巡回护士,造成医生需要灯光位置与调节人员所调的位置之间的差异,其次是克服了因无影灯位置偏高,可能手术中操作无影灯的巡回护士或手术医生身高偏矮,造成:一是巡回护士或手术医生操作不方便,二是影响无影灯位置准确调整的问题。另外还能避免调节无影灯时巡回护士违背无菌原则跨越手术无菌区域,甚至出现调节灯光时身体靠近无菌区域导致污染手术区域或手术器械等意外情况,影响手术进程,增加术中重复材料支出。自动控制器的使用使无影灯的操作实现了遥控加自动调节。
附图说明
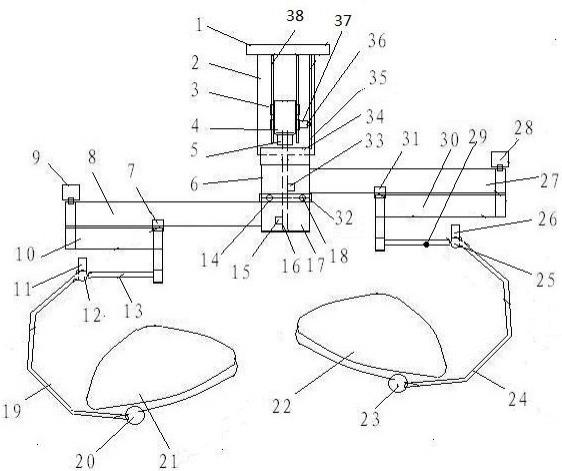
11.图1是本发明的主视示意图图2是本发明的俯视示意图图3是本发明的上旋转臂座与左旋转臂座局部主视示意图图4是本发明的第三旋转臂与柔性杆连接机构主视示意图图中:安装基板1、垂直连接板2、滑块3、第一伺服电机4、减速器5、旋转臂座6、左第四伺服电机7、左第一旋转臂8、左第三伺服电机9、左第二旋转臂10、左第六伺服电机11、左第五伺服电机12、左第三旋转臂13、滚珠槽14、左销键15、旋转杆16、下旋转臂座17、滚珠18、左柔性杆19、左第七伺服电机20、左无影灯罩21、无影灯罩22、第七伺服电机23、柔性杆24、 第五伺服电机25、第六伺服电机26、第一旋转臂27、第三伺服电机28、第三旋转臂29、第二旋转臂30、第四伺服电机31、连接扣32、销键33、定位座34、齿条35、齿轮36、第二伺服电机37、导轨38、转向架39、径向凹槽40、左竖直键槽41、左径向凹槽42、连接扣43、竖直键槽44。
具体实施方式
12.一种遥控调节手术无影灯,包括灯架、无影灯罩,灯架包括有安装连接装置、转向调节装置、旋转臂,安装连接装置包括安装基板1、垂直连接板2、导轨38,安装基板1呈水平设置,安装基板1上面用于连接到楼板基座,安装基板1下面连接垂直连接板2,垂直连接板2
上安装导轨38;转向调节装置包括第一伺服电机4,第二伺服电机37,第一伺服电机4通过滑块安装在导轨38上,导轨38竖直固定安装在垂直连接板2上,第一伺服电机4一侧垂直方向安装有第二伺服电机37,第二伺服电机37安装连接在第一伺服电机4上的其中一块滑块上,第二伺服电机37输出轴上连接有齿轮36,齿轮35与安装在垂直安装板上的齿条35相啮合,齿条35固定安装在垂直连接板2上,实现驱动第一伺服电机4上下移动;转向调节装置还包括旋转杆16,第一伺服电机4的输出轴通过减速器5连接旋转杆16,旋转杆16上设有与旋转臂座6匹配销键33,旋转杆16穿过定位座34与第一旋转臂27的旋转臂座6连接;旋转杆16与定位座34活连接,定位座34固定安装在垂直连接板2上;旋转臂包含有上旋转臂、下旋转臂,上旋转臂包括第一旋转臂27、第二旋转臂30、第三旋转臂29、柔性杆24、第三伺服电机28、第四伺服电机21、第五伺服电机25、第六伺服电机26、第七伺服电机23,第一旋转臂27的一端的旋转臂座6套接在旋转杆16上,第一旋转臂27另一端通过旋转轴与第二旋转臂30转动连接,旋转轴上端连接第三伺服电机28的输出轴,第三伺服电机28机身固定安装在第一旋转臂27的远端上,第三伺服电机28的输出轴连接旋转轴,旋转轴与第二旋转臂30固定连接;第二旋转臂30远端与第三旋转臂29一端转动连接,第四伺服电机21固定安装在第二旋转臂30远端,第四伺服电机21的输出轴连接旋转轴,旋转轴与第三旋转臂29固定连接,第四伺服电机21用于驱动第三旋转臂29旋转;第三旋转臂29另一端固定连接第五伺服电机25;第五伺服电机25连击转向架39,转向架39上固安装有第六伺服电机26,第六伺服电机26输出轴连击柔性杆24,柔性杆24的末端连接第七伺服电机23,第七伺服电机23输出轴固定连接无影灯罩22;第一旋转臂27的旋转臂座6设有竖直键槽44,以及径向凹槽40;下旋转臂包括左第一旋转臂8、左第二旋转臂10、左第三旋转臂13、左柔性杆19、左第三伺服电机9、左第四伺服电机7、左第六伺服电机12、左第五伺服电机11、左第七伺服电机20,左第一旋转臂8的一端的下旋转臂座17套接在旋转杆16上,左第一旋转臂8远端通过旋转轴与左第二旋转臂10转动连接,旋转轴上端连接左第三伺服电机9,左第三伺服电机9机身固定安装在左第一旋转臂8的远端,左第三伺服电机9的输出轴连接旋转轴,旋转轴与左第二旋转臂10固定连接;左第二旋转臂10远端与左第三旋转臂13一端活连接,左第四伺服电机7固定安装在左第二旋转臂10远端,用于驱动左第三旋转臂13旋转;左第三旋转臂13另一端固定连接左第六伺服电机12;左第六伺服电机12输出轴连接左转向架39,左转向架39上固安装有左第五伺服电机11,左第五伺服电机11输出轴连击左柔性杆19,左柔性杆19的末端连接左第七伺服电机20,左第七伺服电机20输出轴固定连接左无影灯罩21;左第一旋转臂8的下旋转臂座17设有左竖直键槽41,以及左径向凹槽42;上旋转臂座6的下端与下旋转臂座7的上端采用旋转连接。所述的上旋转臂座6的下端与下旋转臂座7的上端采用旋转连接,是采用扣环43连接,扣环43设置上沿、下沿为内凸沿,上旋转臂座6的下端开有与扣环43上沿内凸沿相匹配凹槽,下旋转臂座7的上端开有与扣环43下沿内凸沿相匹配凹槽,安装时将扣环43卡上沿内凸沿入上旋转臂座6的下端凹槽,将扣环43卡下沿内凸沿入下旋转臂座7的下端凹槽。
13.进一步的所述一种遥控调节手术无影灯,所述的第一旋转臂27的旋转臂座6下接触面与左第一旋转臂8的旋转臂座17上接触面上均对应开有圆环槽14,圆环槽14内沿圆周均匀设有滚珠凹槽,滚珠凹槽内设有滚珠18以减少第一旋转臂27与左第一旋转臂8之间旋转摩擦。
14.进一步的所述一种遥控调节手术无影灯,还包括有控制器,控制器包括控制电路
ic、输入端、输出端、遥控接受器、遥控器,遥控接收器经输入端电连接控制器ic,控制器ic经输出端电连接控制第一伺服电机4,控制器ic经输出端电连第二伺服电机37,以控制旋转杆16的上下移动实现对上旋转臂、下旋转臂单独转动选择;控制器ic经输出端电连接控制第三伺服电机28,实现第一旋转臂27与第二旋转臂30间的水平旋转角度调节;控制器ic经输出端电连接控制第四伺服电机31,实现第二旋转臂30与第三旋转臂间29的水平旋转角度调节;控制器ic经输出端电连接控制第五伺服电机25,实现第三旋转臂29与柔性杆24间的垂直方向旋转角度调节,控制器ic经输出端电连接控制第六伺服电机26,实现第三旋转臂29与柔性杆24间的水平方向旋转角度调节,控制器ic经输出端电连接控制第七伺服电机23,实现无影灯罩22与柔性杆24间的旋转角度调节;控制器ic经输出端电连接控制左第三伺服电机9,实现左第一旋转臂8与左第二旋转臂10间的水平旋转角度调节;控制器ic经输出端电连接控制左第四伺服电机7,实现左第二旋转臂10与左第三旋转臂13间的旋转角度调节,控制器ic经输出端电连接控制左第五伺服电机12,实现左第三旋转臂13与左柔性杆19间的垂直方向旋转角度调节,控制器ic经输出端电连接控制左第六伺服电机11,实现左第三旋转臂13与左柔性杆19间的水平方向旋转角度调节,控制器ic经输出端电连接控制左第七伺服电机20,实现左无影灯罩21与左柔性杆19间的旋转角度调节,遥控器遥控完成上述动作。
15.进一步的所述一种遥控调节手术无影灯,所述的控制器ic连接有摄影记忆控制装置和手术追踪装置,能实时记录手术医生用灯习惯,能比对记忆,实现无影灯位置快速调节。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1