基于EtherCAT通信控制和DXF文件解析的焊缝跟踪方法与流程
基于ethercat通信控制和dxf文件解析的焊缝跟踪方法
技术领域
[0001]
本发明属于机器人焊接和三维视觉领域。具体涉及一种基于ethercat通信控制和dxf文件解析的焊缝跟踪方法。
背景技术:
[0002]
目前焊接领域,机器人焊接使用较为广泛。传统焊接机器人都是采用本体加控制柜的组合方式。这种结构较为复杂,硬件较多且对机器人设计人员软硬件设计能力要求较高。与此同时,增加视觉功能与机器人控制系统相融合也存在较多问题。对于某些焊接行业,机器人运动轨迹控制要求较为简单,使用现有标准机器人就会造成硬件成本的增加。
技术实现要素:
[0003]
本发明解决了焊接行业中,对于焊接产品一致性差,但是焊接轨迹较为简单的低成本解决方案。利用总线伺服驱动机器人连杆,硬件结构简单。融合了机器人运动控制和三维视觉的软件可以同时运行在同一个软件,利用dxf文件编程解析,实现了离线的编辑方式,简单实用且系统具备较强的通用扩展性。
[0004]
为实现上述目的,本发明提供如下技术方案:
[0005]
基于ethercat通信控制和dxf文件解析的焊缝跟踪方法,包括运动控制部分、三维视觉部分和dxf文件解析部分;其中:
[0006]
运动控制部分:采用机器人运动学数学模型,根据本体数据构建数学模型,通过转换矩阵计算出机器人末端的三维空间位置;通过运动学逆向计算,转换为各个轴的旋转角度;机器人基础运动包括点位运动movj和直线运动movl,通过这两个运动实现运动要求;
[0007]
三维视觉部分:采集轮廓位置信息,转换为实际物理坐标;传感器与机械手通过手眼标定,实现传感器坐标到机器人末端坐标的转换;通过位置转换为机器人末端的三维位置,指引机器人运动;
[0008]
dxf文件解析部分:离线编辑,解析dxf文件;遍历文件的内容,对图形信息解析,分类数据保存,转换为运动功能指令,通过ethercat通信实现机器人运动执行;通过文件解析转换为运动的三维目标点位。
[0009]
更进一步的,采用六轴机器人本体,为本体安装ethercat总线型的伺服驱动,用网线串联六个伺服驱动器和计算机。
[0010]
更进一步的,
[0011]
dxf文件解析后,生成包括功能指令、传感器的触发指令的指令;其中,所述功能指令包括机器人运动指令movl、movej;
[0012]
功能指令执行生成ethercat总线指令,控制机器人本体执行运动,到达目标点点位后,触发传感器采集数据;移动机器人到另外一个位置采集数据;两次采集的数据转换为机器人末端位置后,通过两点确定一条直线,移动机器人末端到达第一个点位,机器人直线movl命令,进行多轴运动插补和焊接轨迹的运动控制;
[0013]
反复执行上述步骤,实现多个位置的运动。
[0014]
更进一步的,采用激光轮廓传感器采集轮廓位置信息,传感器打出的激光线照在物体表面特征不同,对轮廓线数据提取,对数据分析出需要的位置。
[0015]
更进一步的,运动控制部分和三维视觉部分同时运行在同一个软件内,通过机器人与传感器标定位置得到位置转换矩阵,这样通过传感器的位置即可推算出机器人末端位置。得出的位置随时通过ethercat指令发送给六个伺服驱动器运动。
[0016]
更进一步的,通过上位机控制六个总线型伺服电机驱动器,实现六轴机器人的运动控制,这样更加直接高效,实时性强。
[0017]
更进一步的,通过dxf文件解析出焊接位置与三维视觉相结合,控制机器人末端运动控制,实现非标准产品的位置确定,避免了重复示教编程。
[0018]
与现有技术相比,本发明的有益效果是:
[0019]
本发明实现机器人六轴运动控制,使用总线型的伺服驱动,系统硬件结构简单,反应迅速,实时性强。增加了三维激光视觉功能,可以为焊接一致性差的产品提供可行方案。机器人运动控制、视觉、离线编程都可以在一个软件中进行,系统的集成度明显提高。
附图说明
[0020]
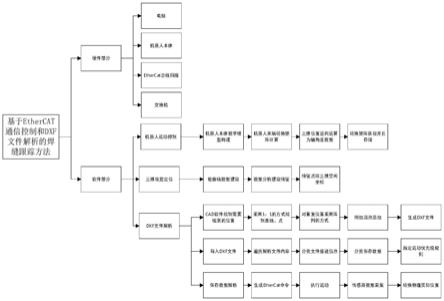
图1是本发明的总体框架图。
具体实施方式
[0021]
下面结合附图对本发明作进一步详细说明。
[0022]
本实施例提供一种如图1所示的基于ethercat通信控制和dxf文件解析的焊缝跟踪方法。该方法包括:
[0023]
一、硬件结构方面,采用传统的六轴机器人本体,为本体安装ethercat总线型的伺服驱动,配置各个驱动器的站点信息。用网线串联六个伺服驱动器、轮廓传感器和电脑,采用数据交换机实现网线的集成。
[0024]
二、上位机方法部分分为三个板块:
[0025]
1、机器人运动控制部分:采用机器人运动学数学模型,根据本体数据构建数学模型,通过转换矩阵计算出机器人末端的三维空间位置。通过运动学逆向计算,转换为各个轴的旋转角度,从而实现机器人运动控制的大体方式。机器人基础运动有点位运动movj和直线运动movl,通过这两个运动基本实现运动要求。
[0026]
2、三维视觉部分:采用激光轮廓传感器,采集轮廓位置信息,转换为实际物理坐标。传感器与机械手通过手眼标定,实现传感器坐标到机器人末端坐标的转换。通过位置转换为机器人末端的三维位置,指引机器人运动。
[0027]
3、dxf文件解析部分:实现离线编辑,解析dxf文件。遍历文件的内容,对图形信息解析,分类数据保存,转换为运动功能指令,通过ethercat通信实现机器人运动执行。通过文件解析转换为运动的三维目标点位。
[0028]
本发明的方法的总体流程如下:
[0029]
1、dxf文件解析后,生成各功能指令,如机器人运动指令movl、movej,传感器的触发指令等。
[0030]
2、功能指令执行顺序:功能指令执行生成ethercat总线指令,控制机器人本体执行运动,到达目标点点位后,触发传感器采集数据。移动机器人到另外一个位置采集数据。两次采集的数据转换为机器人末端位置后,通过两点确定一条直线,移动机器人末端到达第一个点位,机器人直线movl命令,实现多轴运动插补,实现焊接轨迹的运动控制。
[0031]
3、反复执行此流程,实现多个位置的运动。
[0032]
机器人运动轨迹控制要求较为简单,使用现有标准机器人就会造成硬件成本的增加。此时,ethercat总线伺服驱动用于机器人六轴连杆的驱动,不需要增加额外的硬件。通过网线串联六个驱动器和电脑,机器人运动算法计算在电脑中进行,视觉运算也同时在电脑中运行,这样同步实现了机器人视觉运动控制。
[0033]
本发明通过对六轴机器人的硬件和结构设计,利用ethercat总线控制方式,通过上位机控制六个总线型伺服电机驱动器,实现六轴机器人的运动控制。使用三维激光轮廓传感器,指引机器人运动。与此同时,上位机软件提供焊接位置离线编辑功能,通过dxf文件解析出焊接位置与三维视觉相结合,控制机器人末端运动控制。本发明解决了焊接行业中,对于焊接产品一致性差,但是焊接轨迹较为简单的低成本解决方案。利用总线伺服驱动机器人连杆,硬件结构简单。融合了机器人运动控制和三维视觉的软件可以同时运行在同一个软件,利用dxf文件编程解析,实现了离线的编程方式,简单实用且系统具备较强的通用扩展性。对于焊接产品一致性差的问题,工装定位较难满足使用要求,此时三维视觉配合机器人运动可以完美解决这些问题。
[0034]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1