一种屋顶光伏电站的自动化安装系统的制作方法
[0001]
本实用新型涉及一种智能自动化安装系统,具体为一种屋顶光伏电站的自动化安装系统,属于机械自动化在新能源应用技术领域。
背景技术:
[0002]
随着国内外分布式光伏电站的不断增加,人们对光伏电站安装的研究也越来越重视。对于容量较大的电站还是主要铺设在地面,为了提高空间利用率目前在工厂楼房顶面的安装也逐渐增加,目前针对屋顶安装主要还是利用吊机先将光伏板转移到屋顶的某一处可承重位置,然后再由工人双手搬运至安装位置进行安装,目前一块1x2m的光伏板重量约22kg,使得光伏安装极大耗时费力。
[0003]
由于我国对光伏设备的大范围使用起步较晚,对于光伏安装的研究也晚于国外,现在的光伏板安装仍普遍采用单块板的安装或者几块板组成一块大板的安装,安装设备采用叉车或吊机进行协助转运,安装时必须人工确定位置后人力进行螺栓加固。
[0004]
随着现在光伏电站数量的增多但是审核资质要求的降低,光伏电站固定在某一个地方十几年不变的情况将不再存在,当前方式不仅安装耗费人力,拆卸时也同样繁琐。所以现在急需一种可以自动化安装方案进行技术化变革,彻底改变过去来替换掉过去过分依赖人工效率低下的安装方式,实现行业自动化。
技术实现要素:
[0005]
本实用新型的目的就在于为了解决问题而提供一种屋顶光伏电站的自动化安装系统。
[0006]
本实用新型通过以下技术方案来实现上述目的:一种屋顶光伏电站的自动化安装系统,包括光伏组件装配线和厂房;所述光伏组件装配线位于厂房的一侧,所述厂房靠近光伏组件装配线的一边设置有自动抬高滑动台,所述光伏组件装配线和厂房之间安放有可编程agv智能搬运车,所述厂房的房顶设置有多条运行轨道,且所述运行轨道的内侧底端设置有滑轮槽,所述运行轨道靠近自动抬高滑动台的一端安装有可移动机械手,所述光伏组件装配线包括皮带运输生产线和机械手臂,所述机械手臂分别位于皮带运输生产线的两侧,所述光伏组件装配线上用于生产光伏板组件,所述可移动机械手包括机械手、滑动平台和轨道,所述机械手安装在滑动平台上,所述滑动平台放置在轨道上,所述光伏板组件由光伏板和短横梁构成,所述短横梁呈平行状固定连接在光伏板的背板面;
[0007]
其安装方法包括以下步骤:
[0008]
步骤一、装配光伏板组件:首先利用一台机械手臂将光伏板摆放在皮带运输生产线上,再利用两台机械手臂将光伏板及两根短横梁组装成光伏板组件,最后利用一台机械手臂将光伏板组件翻转放置在组装线尾部等候的可编程agv智能搬运车上;
[0009]
步骤二、可编程agv智能搬运车将光伏板组件按照指定路线运输到厂房下面的自动抬高滑动台上,自动抬高滑动台将光伏板组件运输到厂房的屋顶;
[0010]
步骤三、光伏板组件到达屋顶后,房顶上的可移动机械手将滑台上的光伏板组件精确转到智能运输车上;
[0011]
步骤四、智能运输车承载光伏板组件沿着运行轨道移动到所需位置,然后利用自身机械臂将光伏板组件放置在指定的运行轨道位置。
[0012]
作为本实用新型再进一步的方案:所述皮带运输生产线根据线体长度可定制常用的皮带流水线,输送带可选用橡胶、pvc、pu等材质,厚度2mm,流水线轨道及支架采用铝合金型材。
[0013]
作为本实用新型再进一步的方案:所述机械手臂采用型号为sr35b的六轴工业机器人,有效载荷35kg,工作范围2538mm,重复定位精度
±
0.1mm,防护等级ip67。
[0014]
作为本实用新型再进一步的方案:所述机械手臂设置有四台,一台为搬运光伏板的机械手、两台为装配光伏板组件的机械手、一台为翻转打包光伏板组件的机械手,且每台机械手臂均配有单层扁平真空吸盘。
[0015]
作为本实用新型再进一步的方案:所述可编程agv智能搬运车型号采用惯性导航的货架机器人,额定速度1.5m/s、重复停位精度
±
10mm。
[0016]
作为本实用新型再进一步的方案:所述自动抬高滑动台为坡度可调节皮带线,流水线导轨及支架采用铝合金型材加工制作,输送皮带采用2.0mmpvc防静电皮带,动力电机采用cpg调速电机220v的750w电机。
[0017]
作为本实用新型再进一步的方案:所述可移动机械手采用型号为sr35a的六轴工业机器人,有效载荷35kg,工作范围2538mm,重复定位精度
±
0.1mm。
[0018]
作为本实用新型再进一步的方案:所述运行轨道上开设有与光伏板组件所安装短横梁的形状相吻合的凹槽。
[0019]
作为本实用新型再进一步的方案:所述智能运输车采用型号为gcr5-910的协作机器人进行改装,其主体部分为滑轮驱动板车,车身安装电机驱动机械臂。
[0020]
本实用新型的有益效果是:1)在装配光伏板组件部分,利用一台机械手臂将光伏板摆放在皮带运输线上此处可代替两个人工,利用一台机械手臂摆放短横梁可代替一个人工,组装光伏组件可代替两名人工,最后将光伏组件翻转放置在agv运输车上可代替两名人工。此方案机械手最多使用四台,而使用人工则需要至少7个人;
[0021]
2)组件安装完成后使用智能agv转移到抬高移动台上,该自动化技术的机器人在计算机系统的调控下可以实现货架及货物的搬运,具有较高的拣选效率和准确性、较低的劳动强度,此运输方式必将在未来货物配送及拣选中占据主要地位;
[0022]
3)采用抬高移动台也就是一种坡度可调节的皮带运输线作为工具将光伏组件从房子下面转移到屋顶,是因为在功能上其不仅具有抬高货物的功能还具有水平传送的力,可以将货物水平传递到指定位置,在性能上,其输送平稳、噪音小,效率可控,既可将产品按单元控制也可将产品按时间进行控制,特别适合批量自动化生产;
[0023]
4)在光伏组件从抬高平台转移到智能铺设光伏组件运输车的环节,需要精确控制,人力需要两人且安装繁琐。该环节仍采用机械手臂来实现。该机械手臂选用的是同负载级机器人中手臂最长的一款,且具有丰富的外部接口和扩展能力,易于集成。其安装方式采螺栓固定在滑台;
[0024]
5)在光伏组件铺设环节,传统都是采用两个人搬运到所需位置,房屋顶具有一定
坡度,安装人员身上都要绑有安装绳,屋顶还有其它的设备造成安装十分繁琐。本实用新型采用轨道铺设完成后用智能铺设运输车搬运光伏组件到指定位置后自动安装,是节省人力成本安全高效的理想方式。
[0025]
该系统省去最为昂贵的人力成本,不受白天黑夜的限制,始终保持较高的工作效率,为以后光伏电站大范围、智能化应用打下基础。
附图说明
[0026]
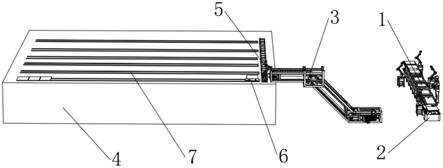
图1为本实用新型整体流程示意图;
[0027]
图2为本实用新型光伏组件装配线结构示意图;
[0028]
图3为本实用新型可移动机械手结构示意图;
[0029]
图4为本实用新型运行轨道结构示意图;
[0030]
图5为本实用新型光伏板组件铺设结构示意图;
[0031]
图6为本实用新型光伏板组件结构示意图。
[0032]
图中:1、光伏组件装配线,2、可编程agv智能搬运车,3、自动抬高滑动台,4、厂房,5、可移动机械手,6、智能运输车,7、运行轨道,8、光伏板组件,11、皮带运输生产线,12、机械手臂,51、机械手,52、滑动平台,53、轨道,71、滑轮槽,81、光伏板和82、短横梁。
具体实施方式
[0033]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0034]
请参阅图1~6,一种屋顶光伏电站的自动化安装系统,包括光伏组件装配线1和厂房4;所述光伏组件装配线1位于厂房4的一侧,所述厂房4靠近光伏组件装配线1的一边设置有自动抬高滑动台3,所述光伏组件装配线1和厂房4之间安放有可编程agv智能搬运车2,所述厂房4的房顶设置有多条运行轨道7,且所述运行轨道7的内侧底端设置有滑轮槽71,所述运行轨道7靠近自动抬高滑动台3的一端安装有可移动机械手5,所述光伏组件装配线1包括皮带运输生产线11和机械手臂12,所述机械手臂12分别位于皮带运输生产线11的两侧,所述光伏组件装配线1上用于生产光伏板组件8,所述可移动机械手5包括机械手51、滑动平台52和轨道53,所述机械手51安装在滑动平台52上,所述滑动平台52放置在轨道53上,所述光伏板组件8由光伏板81和短横梁82构成,所述短横梁82呈平行状固定连接在光伏板81的背板面;
[0035]
其安装方法包括以下步骤:
[0036]
步骤一、装配光伏板组件:首先利用一台机械手臂12将光伏板81摆放在皮带运输生产线11上,再利用两台机械手臂12将光伏板81及两根短横梁82组装成光伏板组件8,最后利用一台机械手臂12将光伏板组件8翻转放置在组装线尾部等候的可编程agv智能搬运车2上;
[0037]
步骤二、可编程agv智能搬运车2将光伏板组件8按照指定路线运输到厂房4下面的自动抬高滑动台3上,自动抬高滑动台3将光伏板组件8运输到厂房4的屋顶;
[0038]
步骤三、光伏板组件8到达屋顶后,房顶上的可移动机械手5将滑台上的光伏板组件8精确转到智能运输车6上;
[0039]
步骤四、智能运输车6承载光伏板组件8沿着运行轨道7移动到所需位置,然后利用自身机械臂将光伏板组件8放置在指定的运行轨道7位置。
[0040]
在本实用新型实施例中,所述皮带运输生产线11根据线体长度可定制常用的皮带流水线,输送带可选用橡胶、pvc、pu等材质,厚度2mm,流水线轨道及支架采用铝合金型材。
[0041]
在本实用新型实施例中,所述机械手臂12采用型号为sr35b的六轴工业机器人,有效载荷35kg,工作范围2538mm,重复定位精度
±
0.1mm,防护等级ip67。
[0042]
在本实用新型实施例中,所述机械手臂12设置有四台,一台为搬运光伏板81的机械手、两台为装配光伏板组件8的机械手、一台为翻转打包光伏板组件8的机械手,且每台机械手臂12均配有单层扁平真空吸盘。
[0043]
在本实用新型实施例中,所述可编程agv智能搬运车2型号采用惯性导航的货架机器人,额定速度1.5m/s、重复停位精度
±
10mm。
[0044]
在本实用新型实施例中,所述自动抬高滑动台3为坡度可调节皮带线,流水线导轨及支架采用铝合金型材加工制作,输送皮带采用2.0mmpvc防静电皮带,动力电机采用cpg调速电机220v的750w电机。
[0045]
在本实用新型实施例中,所述可移动机械手5采用型号为sr35a的六轴工业机器人,有效载荷35kg,工作范围2538mm,重复定位精度
±
0.1mm。
[0046]
在本实用新型实施例中,所述运行轨道7上开设有与光伏板组件8所安装短横梁82的形状相吻合的凹槽,该位置与光伏组件上的横梁形成有效卡扣。
[0047]
在本实用新型实施例中,所述智能运输车6采用型号为gcr5-910的协作机器人进行改装,其主体部分为滑轮驱动板车,车身安装电机驱动机械臂。
[0048]
工作原理:在使用该屋顶光伏电站的自动化安装系统及其安装方法时,首先利用机械手臂将光伏板81摆放在皮带运输线11上,再利用机械手臂将两根短横梁82放置在光伏板81上,利用机械手臂将光伏板81及两根短横梁82组装成光伏板组件8,最后利用机械手臂将光伏板组件8翻转放置在装配线线尾部等候的agv智能运输车2上;agv智能运输车2将光伏板组件8按照指定路线运输到房屋下面的坡度可调节皮带线的自动抬高滑动台3上,滑动皮带将光伏板组件8运输到屋顶;光伏板组件8到达屋顶后,房顶上的可移动机械手5将滑台上的光伏板组件8精确转到智能运输车6上。当一列光伏板组件8安装完毕后,可移动机械手5可利用自身的轨道退到第二列光伏安装轨道的合适位置进行光伏板组件8的搬运;智能运输车6承载光伏板组件8沿着运行轨道7移动到所需位置,然后利用自身机械臂将光伏板组件8放置在指定的轨道位置,该运行轨道7设计有与光伏板的短横梁82形状相吻合的凹槽,该位置可与光伏板组件8上的短横梁82形成有效卡扣,放置完毕后机械臂收缩,智能运输车6返回进行下一次搬运。
[0049]
对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制
所涉及的权利要求。
[0050]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1