一种光轴自动加工装置的制作方法
1.本发明涉及光轴加工装置,尤其涉及一种光轴自动加工装置。
背景技术:
2.光轴被广泛用在气缸杆,自动紧密打印机,自动切割机和工业机器人等诸多直线运动系统中,光轴别称有很多种:活塞杆、电镀杆等。光轴在加工过程中通常会需要加工一整排的孔,现有的装置不能对光轴进行自动输送,通常需要人工搬运,人工成本高,工作效率低。
技术实现要素:
3.本发明要解决上述现有技术存在的问题,提供一种光轴自动加工装置,可以自动对光轴进行输送加工,加工效率高。
4.本发明解决其技术问题采用的技术方案:这种光轴自动加工装置,包括钻孔机构、设置在钻孔机构左侧的送料机构、设置在钻孔机构右侧的收料机构,所述送料机构包括送料支架,送料支架前端固定连接有第一导向板,第一导向板前端向下倾斜,第一导向板有若干个,第一导向板前端转动连接有第一连接轴,第一连接轴外侧固定连接有第一l型杆,第一l型杆有若干个,第一连接轴外侧固定连接有第三链轮,第三链轮下方设有转动连接在第一导向板上的第二连接轴,第二连接轴外侧固定连接有第四链轮,第三链轮和第四链轮之间通过第二链条连接,第二连接轴外侧固定连接有第二齿轮,第二齿轮下端啮合有转动连接在送料机架上的第三齿轮,第三齿轮下端啮合有第一齿条,第一齿条下端固定连接第一滑块,送料机架上固定连接有第一导轨,第一滑块滑动连接在第一导轨外侧,第一齿条上螺纹连接有第三螺杆,第三螺杆转动连接在送料支架上,第三螺杆后端固定连接有第一电机,第三齿轮后端设有转动连接在送料机架上的第四齿轮,第四齿轮一端固定连接有第二蜗轮,第二蜗轮前端啮合有第二蜗杆,第二蜗杆上端固定连接有第二螺杆,第二螺杆外侧螺纹连接有顶块,顶块有若干个,相邻两个顶块之间通过第一连接杆连接,送料机架上固定连接有第一导向轴,顶块滑动连接在第一导向轴外侧,第一连接轴后端设有转动连接在第一导向板上的第三连接轴,第三连接轴外侧固定连接有第六齿轮,第六齿轮上端啮合有滑动连接在第一导向板上的第二齿条,第二齿条上端固定连接有限位块,第六齿轮下端啮合有滑动连接在第一导向板上的第三齿条,第三齿条后端固定连接有第一气缸,第一气缸固定连接在第一导向板上,所述收料机构包括收料机架,收料机架前端固定连接有第二导向板,第二导向板前端向上倾斜,第二导向板有若干个,第二导向板前端转动连接有第四连接轴,第四连接轴外侧固定连接有第二l型杆,第二l型杆有若干个,第四连接轴外侧固定连接有第六链轮,第六链轮下方设有转动连接在第二导向板上的第五连接轴,第五连接轴外侧固定连接有第七链轮,第六链轮和第七链轮之间通过第四链条连接,第五连接轴外侧固定连接有第八齿轮,第八齿轮下端设有第五齿条,第五齿条下端固定连接有第六滑块,收料机架上固定连接有第六导轨,第五齿条上螺纹连接有第七螺杆,第七螺杆转动连接在收料机架上,
第一螺杆后端固定连接有第四电机,第二导向板后端设有第二放置板,第二放置板前端向上倾斜,送料机构和收料机构前端都设有输送机构,输送机构包括第一支撑架,第一支撑架上端固定连接有输送v型块,输送v型块有若干个且等距均匀分布,左侧的输送机构前端设有推料机构,推料机构包括第二支撑架,第二支撑架上端固定连接有第五螺杆,第五螺杆左端固定连接有第二电机,第五螺杆外侧螺纹连接有推料块,第五螺杆前端设有固定连接在第二支撑架上的第三导向轴,推料块滑动连接在第三导向轴外侧,所述钻孔机构包括支撑板、固定连接在支撑板下端的支撑架,支撑板上端固定连接有钻床,钻床右端设有固定连接在支撑板上端的固定v型块,固定v型块上端固定连接有第三气缸,第三气缸下端固定连接有第一压块,钻床左侧设有输料机构,输料机构包括送料v型块,送料v型块下端固定连接有第四滑块,支撑板上端固定连接有第四导轨,第四滑块滑动连接在第四导轨外侧,送料v型块上端固定连接有第五气缸,第五气缸下端固定连接有第二压块,支撑板上端开有滑槽,送料v型块下端固定连接有连接块,连接块滑动连接在滑槽内侧,连接块下端固定连接有连接板,连接板右端设有固定连接在支撑脚上的限位板,连接板左端设有固定连接在支撑脚上的固定板,固定板前后两端都固定连接有第二弹簧的一端,第二弹簧另一端固定连接在连接板上,第二弹簧内侧设有固定连接在固定板上的第四导向轴,连接板滑动连接在第四导向轴外侧,连接板右端设有安装块,安装块上转动连接有凸轮,凸轮远离安装块一端固定连接有第七齿轮,第七齿轮右侧设有第三支撑架,第三支撑架上固定连接有第六气缸,第六气缸左端固定连接有第四齿条,第四齿条可以带动第七齿轮转动,第四齿条前端设有固定连接在第三支撑架上的挡板,挡板后端固定连接有第五导轨,第四齿条前端固定连接有第五滑块,第五滑块滑动连接在第五导轨外侧,送料机构可以将光轴输送到左侧的输送v型块上端,推料块将光轴输送到送料v型块块上端,第四齿条可以带动第七齿轮转动,第七齿轮带动凸轮转动,凸轮和第二弹簧的相互作用带动连接板左右移动,连接板带动送料v型块左右移动,由于凸轮的作用可以带动光轴以一定的长度进行输送,钻床对光轴进行钻孔,钻孔完毕收料机构将光轴收集,自动化程度高,可以自动对光轴进行输送加工,加工效率高。
5.为了进一步完善,所述第三支撑架左端前后两侧都转动连接有第五链轮,前后两个第五链轮之间通过第三链条连接,安装块固定连接在第三链条上,安装块有若干个且等距均匀分布在第三链条外侧,后端的第五链轮右端固定连接有第三电机,各个安装块上的凸轮尺寸不同,可以对相邻两孔距离要求不同的光轴进行加工,使得装置的使用范围更广。
6.进一步完善,所述第二压块下端固定连接有橡胶块,橡胶块可以增大摩擦力,送料v型块对光轴的输送效果更好,橡胶块还可以起到减震效果,使得使得光轴的钻孔精度更高、效果更好。
7.进一步完善,所述第一导向板后端设有固定连接在送料机架内侧的第一放置板,第一放置板前端向下倾斜,第一放置板下端固定连接有第二气缸,第二气缸带动第一放置板上移一定距离,使得第二放置板上的光轴滚动到第一导向板上,装置的自动化程度更高,使用更加便捷。
8.进一步完善,所述第四齿轮后端设有转动连接在送料机架上的第五齿轮,第五齿轮一端固定连接有第三蜗轮,第三蜗轮前端啮合有第三蜗杆 ,第三蜗杆上端固定连接有第四螺杆,第四螺杆外侧螺纹连接有缓冲块,送料机架上固定连接有第二导向轴,缓冲块滑动连接在第二导向轴外侧,缓冲块上端开有滑孔,滑孔内滑动连接有缓冲球,缓冲球下端固定
连接有第一弹簧的一端,第一弹簧的另一端固定连接在缓冲块上,缓冲块有若干个,相邻两个缓冲块之间通过第二连接杆连接,缓冲球可以对光轴进行缓冲,避免光轴速度过快撞击限位块造成损伤。
9.进一步完善,所述送料机架上端开有滑移槽,滑移槽内滑动连接有送料板,送料板左右两端都螺纹连接有第一螺杆,第一螺杆转动连接在送料机架上,第一螺杆前端都固定连接有第一蜗杆,第一蜗杆下端啮合有第一蜗轮,第一蜗轮靠近第一导向板一端固定连接有第一链轮,第一链轮下方设有转动连接在送料机架上的第二链轮, 第一链轮和第二链轮之间通过第一链条连接,第二链轮上固定连接有第一齿轮,第一齿轮可与第一齿条啮合,由于光轴放置时,相互之间会有一个间隙,会阻挡最上方的光轴滚动到第一导向板上,送料板可将光轴推动到第一导向板上端,使得装置使用效果更好。
10.进一步完善,所述第八齿轮后端设有转动连接在收料机架上的第九齿轮,第九齿轮一端固定连接有第四蜗轮,第四蜗轮后端啮合有第四蜗杆,第四蜗杆上端固定连接有第六螺杆,第六螺杆外侧螺纹连接有减速块,收料机架上固定连接有第五导向轴,减速块滑动连接在第五导向轴外侧,减速块有若干个,相邻两个减速块之间通过第三连接杆连接,减速块可以对光轴进行缓冲,避免光轴速度过快撞击收料机架造成损伤。
11.进一步完善,所述第二放置板下端固定连接有第七气缸,第七气缸带动第二放置板下移一定距离,使得第二导向板上的光轴滚动到第二放置板上,装置的自动化程度更高,使用更加便捷。
12.进一步完善,所述钻床下端设有固定连接有支撑板上的支撑v型块,支撑v型块和支撑板上都开有排屑槽和定位槽,定位槽内滑动连接有定位板,定位板左端固定连接有第二感应器,定位板下端固定连接有第四气缸,第四气缸下端固定连接有固定块,固定块固定连接在支撑脚上,排屑槽下端设有放置在固定块上的废料箱,限位块后端固定连接有第一感应器,钻床左端设有固定连接在支撑板上端的第三感应器,收料机架右端固定连接有第四感应器,使得装置的定位效果更好,加工精度更高。
13.进一步完善,所述输送v型块上侧左右两端都开有安装槽,安装槽内转动连接有滚轮,减小摩擦力,使得输送v型块的输送效果更好,使用更加便捷,开有避免对光轴表面造成损伤。
14.本发明有益的效果是:本发明可以自动对光轴进行输送加工,加工效率高,送料机构可以将光轴输送到左侧的输送v型块上端,推料块将光轴输送到送料v型块块上端,第四齿条可以带动第七齿轮转动,第七齿轮带动凸轮转动,凸轮和第二弹簧的相互作用带动连接板左右移动,连接板带动送料v型块左右移动,由于凸轮的作用可以带动光轴以一定的长度进行输送,钻床对光轴进行钻孔,钻孔完毕收料机构将光轴收集,自动化程度高,可以自动对光轴进行输送加工,加工效率高,各个安装块上的凸轮尺寸不同,可以对相邻两孔距离要求不同的光轴进行加工,使得装置的使用范围更广,第一压块在光轴钻孔时对光轴的固定效果更好,使得光轴的钻孔精度更高,橡胶块可以增大摩擦力,送料v型块对光轴的输送效果更好,橡胶块还可以起到减震效果,使得使得光轴的钻孔精度更高、效果更好,缓冲球可以对光轴进行缓冲,避免光轴速度过快撞击限位块造成损伤,由于光轴放置时,相互之间会有一个间隙,会阻挡最上方的光轴滚动到第一导向板上,送料板可将光轴推动到第一导向板上端,使得装置使用效果更好,减速块可以对光轴进行缓冲,避免光轴速度过快撞击收
料机架造成损伤。
附图说明
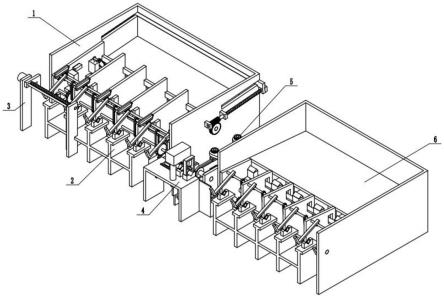
15.图1为本发明的结构示意图;图2为本发明送料机构的结构示意图;图3为本发明送料机构内部的结构示意图;图4为本发明第一l型杆的结构示意图;图5为本发明第二螺杆的结构示意图;图6为本发明限位块的结构示意图;图7为本发明缓冲块的右剖视图;图8为本发明收料机构的结构示意图;图9为本发明收料机构内部的结构示意图;图10为本发明第二l型杆的结构示意图;图11为本发明输送机构的结构示意图;图12为本发明推料机构的结构示意图;图13为本发明钻孔机构的结构示意图;图14为本发明支撑v型块的剖视图;图15为本发明输料机构的结构示意图。
16.附图标记说明:1、送料机构;11、送料机架;111、滑移槽;112、送料板;113、第一螺杆;114、第一蜗杆;115、第一蜗轮;116、第一链轮;117、第一链条;118、第二链轮;119、第一齿轮;12、第一导向板;121、第一连接轴;122、第一l型杆;123、第三链轮;124、第二链条;125、第二连接轴;126、第四链轮;127、第二齿轮;128、第三齿轮;13、顶块;131、第二螺杆;132、第一导向轴;133、第二蜗杆;134、第二蜗轮;135、第四齿轮;136、第一连接杆;14、第一齿条;141、第三螺杆;142、第一电机;143、第一滑块;144、第一导轨;15、缓冲块;151、滑孔;152、第一弹簧;153、缓冲球;154、第四螺杆;155、第三蜗杆;156、第三蜗轮;157、第五齿轮;158、第二导向轴;159、第二连接杆;16、限位块;161、第二齿条;162、第六齿轮;163、第三连接轴;164、第一感应器;17、第三齿条;171、第一气缸;18、第一放置板;181、第二气缸;2、输送机构;21、第一支撑架;22、输送v型块;221、安装槽;222、滚轮;3、推料机构;31、第二支撑架;32、第五螺杆;321、推料块;33、第三导向轴;34、第二电机;4、钻孔机构;41、支撑板;411、滑槽;412、支撑脚;413、固定块;414、第四导轨;415、第三感应器;42、固定v型块;421、第三气缸;422、第一压块;43、支撑v型块;431、排屑槽;432、定位槽;44、定位板;441、第二感应器;442、第四气缸;45、废料箱;46、钻床;5、输料机构;51、送料v型块;511、第五气缸;512、第二压块;513、橡胶块;514、连接块;515、连接板;516、第四滑块;52、固定板;521、第二弹簧;522、限位板;523、第四导向轴;53、第三支撑架;531、第五链轮;532、第三链条;533、第三电机;54、安装块;541、凸轮;542、第七齿轮;55、第四齿条;551、第六气缸;552、第五滑块;56、挡板;561、第五导轨;6、收料机构;61、收料机架;611、第四感应器;62、第二导向板;621、第四连接轴;622、第二l型杆;623、第六链轮;624、第四链条;625、第五连接轴;626、第七链轮;627、第八齿轮;63、减速块;631、第六螺杆;632、第四蜗杆;633、第四蜗轮;634、第九齿轮;635、第五导向轴;636、第三连接杆;64、第五齿条;641、第四电机;642、第七螺杆;643、第六
滑块;644、第六导轨;65、第二放置板;651、第七气缸。
具体实施方式
17.下面结合附图对本发明作进一步说明:如图1-图7所示:本实施例中一种光轴自动加工装置,包括钻孔机构4、设置在钻孔机构4左侧的送料机构1、设置在钻孔机构4右侧的收料机构6,送料机构1包括送料支架,送料支架前端固定连接有第一导向板12,第一导向板12前端向下倾斜,第一导向板12有若干个,第一导向板12前端转动连接有第一连接轴121,第一连接轴121外侧固定连接有第一l型杆122,第一l型杆122有若干个,第一连接轴121外侧固定连接有第三链轮123,第三链轮123下方设有转动连接在第一导向板12上的第二连接轴125,第二连接轴125外侧固定连接有第四链轮126,第三链轮123和第四链轮126之间通过第二链条124连接,第二连接轴125外侧固定连接有第二齿轮127,第二齿轮127下端啮合有转动连接在送料机架11上的第三齿轮128,第三齿轮128下端啮合有第一齿条14,第一齿条14下端固定连接第一滑块143,送料机架11上固定连接有第一导轨144,第一滑块143滑动连接在第一导轨144外侧,第一齿条14上螺纹连接有第三螺杆141,第三螺杆141转动连接在送料支架上,第三螺杆141后端固定连接有第一电机142,第三齿轮128后端设有转动连接在送料机架11上的第四齿轮135,第四齿轮135一端固定连接有第二蜗轮134,第二蜗轮134前端啮合有第二蜗杆133,第二蜗杆133上端固定连接有第二螺杆131,第二螺杆131外侧螺纹连接有顶块13,顶块13有若干个,相邻两个顶块13之间通过第一连接杆136连接,送料机架11上固定连接有第一导向轴132,顶块13滑动连接在第一导向轴132外侧,第一连接轴121后端设有转动连接在第一导向板12上的第三连接轴163,第三连接轴163外侧固定连接有第六齿轮162,第六齿轮162上端啮合有滑动连接在第一导向板12上的第二齿条161,第二齿条161上端固定连接有限位块16,第六齿轮162下端啮合有滑动连接在第一导向板12上的第三齿条17,第三齿条17后端固定连接有第一气缸171,第一气缸171固定连接在第一导向板12上,第一导向板12后端设有固定连接在送料机架11内侧的第一放置板18,第一放置板18前端向下倾斜,第一放置板18下端固定连接有第二气缸181,第四齿轮135后端设有转动连接在送料机架11上的第五齿轮157,第五齿轮157一端固定连接有第三蜗轮156,第三蜗轮156前端啮合有第三蜗杆155 ,第三蜗杆155上端固定连接有第四螺杆154,第四螺杆154外侧螺纹连接有缓冲块15,送料机架11上固定连接有第二导向轴158,缓冲块15滑动连接在第二导向轴158外侧,缓冲块15上端开有滑孔151,滑孔151内滑动连接有缓冲球153,缓冲球153下端固定连接有第一弹簧152的一端,第一弹簧152的另一端固定连接在缓冲块15上,缓冲块15有若干个,相邻两个缓冲块15之间通过第二连接杆159连接,送料机架11上端开有滑移槽111,滑移槽111内滑动连接有送料板112,送料板112左右两端都螺纹连接有第一螺杆113,第一螺杆113转动连接在送料机架11上,第一螺杆113前端都固定连接有第一蜗杆114,第一蜗杆114下端啮合有第一蜗轮115,第一蜗轮115靠近第一导向板12一端固定连接有第一链轮116,第一链轮116下方设有转动连接在送料机架11上的第二链轮118, 第一链轮116和第二链轮118之间通过第一链条117连接,第二链轮118上固定连接有第一齿轮119,第一齿轮119可与第一齿条14啮合。
18.如图1和图8-图10所示:收料机构6包括收料机架61,收料机架61前端固定连接有第二导向板62,第二导向板62前端向上倾斜,第二导向板62有若干个,第二导向板62前端转
动连接有第四连接轴621,第四连接轴621外侧固定连接有第二l型杆622,第二l型杆622有若干个,第四连接轴621外侧固定连接有第六链轮623,第六链轮623下方设有转动连接在第二导向板62上的第五连接轴625,第五连接轴625外侧固定连接有第七链轮626,第六链轮623和第七链轮626之间通过第四链条624连接,第五连接轴625外侧固定连接有第八齿轮627,第八齿轮627下端设有第五齿条64,第五齿条64下端固定连接有第六滑块643,收料机架61上固定连接有第六导轨644,第五齿条64上螺纹连接有第七螺杆642,第七螺杆642转动连接在收料机架61上,第一螺杆113后端固定连接有第四电机641,第二导向板62后端设有第二放置板65,第二放置板65前端向上倾斜,第二放置板65下端固定连接有第七气缸651,第八齿轮627后端设有转动连接在收料机架61上的第九齿轮634,第九齿轮634一端固定连接有第四蜗轮633,第四蜗轮633后端啮合有第四蜗杆632,第四蜗杆632上端固定连接有第六螺杆631,第六螺杆631外侧螺纹连接有减速块63,收料机架61上固定连接有第五导向轴635,减速块63滑动连接在第五导向轴635外侧,减速块63有若干个,相邻两个减速块63之间通过第三连接杆636连接。
19.如图1和图11-图12所示:送料机构1和收料机构6前端都设有输送机构2,输送机构2包括第一支撑架21,第一支撑架21上端固定连接有输送v型块22,输送v型块22上侧左右两端都开有安装槽221,安装槽221内转动连接有滚轮222,输送v型块22有若干个且等距均匀分布,左侧的输送机构2前端设有推料机构3,推料机构3包括第二支撑架31,第二支撑架31上端固定连接有第五螺杆32,第五螺杆32左端固定连接有第二电机34,第五螺杆32外侧螺纹连接有推料块321,第五螺杆32前端设有固定连接在第二支撑架31上的第三导向轴33,推料块321滑动连接在第三导向轴33外侧。
20.如图1和图13-图15所示:钻孔机构4包括支撑板41、固定连接在支撑板41下端的支撑架,支撑板41上端固定连接有钻床46,钻床46右端设有固定连接在支撑板41上端的固定v型块42,固定v型块42上端固定连接有第三气缸421,第三气缸421下端固定连接有第一压块422,钻床46左侧设有输料机构5,输料机构5包括送料v型块51,送料v型块51下端固定连接有第四滑块516,支撑板41上端固定连接有第四导轨414,第四滑块516滑动连接在第四导轨414外侧,送料v型块51上端固定连接有第五气缸511,第五气缸511下端固定连接有第二压块512,第二压块512下端固定连接有橡胶块513,支撑板41上端开有滑槽411,送料v型块51下端固定连接有连接块514,连接块514滑动连接在滑槽411内侧,连接块514下端固定连接有连接板515,连接板515右端设有固定连接在支撑脚412上的限位板522,连接板515左端设有固定连接在支撑脚412上的固定板52,固定板52前后两端都固定连接有第二弹簧521的一端,第二弹簧521另一端固定连接在连接板515上,第二弹簧521内侧设有固定连接在固定板52上的第四导向轴523,连接板515滑动连接在第四导向轴523外侧,连接板515右端设有安装块54,安装块54上转动连接有凸轮541,凸轮541远离安装块54一端固定连接有第七齿轮542,第七齿轮542右侧设有第三支撑架53,第三支撑架53左端前后两侧都转动连接有第五链轮531,前后两个第五链轮531之间通过第三链条532连接,安装块54固定连接在第三链条532上,安装块54有若干个且等距均匀分布在第三链条532外侧,后端的第五链轮531右端固定连接有第三电机533,各个安装块54上的凸轮541尺寸不同,第三支撑架53上固定连接有第六气缸551,第六气缸551左端固定连接有第四齿条55,第四齿条55可以带动第七齿轮542转动,第四齿条55前端设有固定连接在第三支撑架53上的挡板56,挡板56后端固定连接有
第五导轨561,第四齿条55前端固定连接有第五滑块552,第五滑块552滑动连接在第五导轨561外侧,钻床46下端设有固定连接有支撑板41上的支撑v型块43,支撑v型块43和支撑板41上都开有排屑槽431和定位槽432,定位槽432内滑动连接有定位板44,定位板44左端固定连接有第二感应器441,定位板44下端固定连接有第四气缸442,第四气缸442下端固定连接有固定块413,固定块413固定连接在支撑脚412上,排屑槽431下端设有放置在固定块413上的废料箱45,限位块16后端固定连接有第一感应器164,钻床46左端设有固定连接在支撑板41上端的第三感应器415,收料机架61右端固定连接有第四感应器611。
21.本发明在使用时:输入光轴相邻两孔之间的距离,第三电机533带动第五链轮531转动,第五链轮531带动第三链条532转动,第三链条532带动安装块54移动,安装块54带动凸轮541移动,使得符合要求的凸轮541位于最前端,输入光轴的直径,第一气缸171带动第三齿条17移动,第三齿条17带动第六齿轮162转动,第六齿轮162带动第二齿条161移动,第二齿条161带动限位块16前后移动,使得限位块16最后端与顶块13最后端的距离等于光轴的直径,第一电机142带动第三螺杆141转动,第三螺杆141带动第一齿条14向后移动,第一齿条14带动第三齿轮128转动,第三齿轮128带动第二齿轮127转动,第二齿轮127带动第一l型杆122前端向上转动,第一齿条14带动第四齿轮135转动,第四齿轮135带动第二蜗轮134转动,第二蜗轮134带动第二蜗杆133转动,第二蜗杆133带动第二螺杆131转动,第二螺杆131带动顶块13向上移动,第一齿轮119带动第五齿轮157转动,第五齿轮157带动第三蜗轮156转动,第三蜗轮156带动第三蜗杆155转动,第三蜗杆155带动第四螺杆154转动,第四螺杆154带动缓冲块15向上移动,第二气缸181带动第一放置板18上移一个光轴直径的距离,最上层的光轴滚动到第一导向板12上端,第一齿条14向后移动带动第一齿轮119转动,第一齿轮119带动第二链轮118转动,第二链轮118通过第一链条117带动第一链轮116转动,第一链轮116带动第一蜗轮115转动,第一蜗轮115带动第一蜗杆114转动,第一蜗杆114带动第一螺杆113转动,第一螺杆113带动送料板112向前移动,送料板112将最上端的光轴推动到第一导向板12上端,第一齿条14向前移动带动送料板112向后移动、带动缓冲块15向下移动、带动顶块13向下移动,第一齿条14向后移动带动顶块13向上移动,将光轴顶起,光轴滚动到第一l型杆122上端,第一齿条14向前移动带动第一l型杆122前端向下转动,第一l型杆122将光轴输送到左侧的输送v型块22上端,第四气缸442带动定位板44上移,第二电机34带动第五螺杆32转动,第五螺杆32带动推料块321向右移动将光轴输送到送料v型块51上端,光轴接触第二感应器441,第六气缸551带动第四齿条55向左移动,第四齿条55带动第七齿轮542转动,第七齿轮542带动凸轮541转动,凸轮541带动连接板515向左移动,连接板515带动连接块514向左移动,连接块514带动送料v型块51向左移动,送料v型块51到达最左端时,第五气缸511带动第二压块512下移,第二压块512带动橡胶块513下移将光轴固定,推料块321回复原位,第六气缸551带动第四齿条55向右移动,第四齿条55带动第七齿轮542转动,第七齿轮542带动凸轮541转动,凸轮541与第二弹簧521的共同作用带动连接板515向右移动,连接板515带动连接块514向右移动,连接块514带动送料v型块51向右移动,送料v型块51到达最右端时,第四气缸442带动第一压块422下移将光轴固定,钻床46对光轴进行钻孔,送料v型块51重复上述步骤,使得一根光轴加工完毕,送料机构1将下一根光轴输送到左侧的输送v型块22上端,推料块321带动下一根光轴向右移动,下一根光轴带动上一根光轴向右移动,使得上一根光轴接触第四感应器611,送料v型块51带动下一根光轴向左移动,当第三感应
器415感应到上端没有光轴时,第四电机641带动第七螺杆642转动,第七螺杆642带动第五齿条64向前移动,第五齿条64带动第九齿轮634转动,第九齿轮634带动第四蜗轮633转动,第四蜗轮633带动第四蜗杆632转动,第四蜗杆632带动第六螺杆631转动,第六螺杆631带动减速块63上移,第五齿条64带动第八齿轮627转动,第八齿轮627带动第七链轮626转动,第七链轮626通过第四链条624带动第六链轮623转动,第六链轮623带动第四连接轴621转动,第四连接轴621带动第二l型杆622前端向上转动,将光轴输送到第二放置板65上端。
22.虽然本发明已通过参考优选的实施例进行了图示和描述,但是,本专业普通技术人员应当了解,在权利要求书的范围内,可作形式和细节上的各种光轴自动加工装置各样变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1