一种环形薄壁高速飞行器壳体的加工设备的制作方法
1.本发明属于环形高速飞行器壳体的加工技术领域,具体涉及一种环形薄壁高速飞行器壳体的加工设备。
背景技术:
2.环形高速飞行器属于飞行器的一种,具备飞行和升空的功能,环形高速飞行器外壳通常呈流线型的薄壁长筒形状,内部包覆有燃料和飞行装置,用于将环形高速飞行器发射升空。
3.现有的环形薄壁高速飞行器壳体一般通过精密车床车出其外形,但环形薄壁高速飞行器的截面直径较大,导致精密车床夹持后不能准确测出环形薄壁高速飞行器与车床主轴的同轴度,影响环形薄壁高速飞行器外壳厚度不均,影响其质量,存在改善的余地。
技术实现要素:
4.本发明的目的在于提供一种环形薄壁高速飞行器壳体的加工设备,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种环形薄壁高速飞行器壳体的加工设备,其特征在于:包括机床床体和可调节定轴夹持装置,所述机床床体通过机床卡盘与可调节定轴夹持装置活动连接,所述可调节定轴夹持装置内设有机床夹盘和夹持装置夹臂,所述夹持装置夹臂以机床夹盘圆心为几何中心阵列分布于机床夹盘的外侧,所述夹持装置夹臂内设有夹持装置扩张杆和夹持装置固定杆,所述夹持装置夹臂通过夹持装置固定杆与环形薄壁高速飞行器壳体固定连接;所述机床夹盘的内部开设有容置夹持装置夹臂活动的夹盘滑道,所述夹盘滑道的内部开设有容置第一红外传感器的传感器射频槽,所述夹持装置扩张杆通过气缸连接架固连有第一气缸,所述第一气缸穿过夹持装置扩张杆与夹持装置固定杆固连,所述气缸连接架的底部与夹持装置固定杆的底部齐平,所述第一红外传感器的输出端正对气缸连接架底部。
6.优选的,所述夹持装置固定杆包括固定杆杆体,所述固定杆杆体的内部开设有容置第二红外传感器的射频腔,所述夹持装置固定杆的外部固连有吸盘,所述第二红外传感器的输出端正对吸盘。
7.优选的,所述夹持装置扩张杆包括第一扩张杆、第二扩张杆和扩张活动杆,所述第二扩张杆的内部固连有第二气缸,所述第二气缸的输出端与扩张活动杆固连,所述扩张活动杆远离第二气缸的一端与第一扩张杆固连。
8.优选的,所述扩张活动杆的一侧设置有弹簧,所述弹簧的两端均设置有弹簧板,所述第一扩张杆和第二扩张杆的内部均开设有容置弹簧板的弹簧板槽,所述弹簧板槽的一侧开设有螺栓槽,所述弹簧板通过螺栓与螺栓槽栓接。
9.优选的,所述射频腔的一侧开设有钢化玻璃,所述第二红外传感器的输出端穿过钢化玻璃正对吸盘。
10.优选的,包括调节螺杆,所述机床夹盘内部开设有夹盘螺孔,所述夹盘螺孔与调节螺杆相适配,所述调节螺杆的一端穿过夹盘螺孔与扩张活动杆栓接。
11.优选的,所述第一红外传感器设置有四组,所述气缸连接架设置有四组,所述第一红外传感器与气缸连接架一一对应,令所述四组第一红外传感器分别为a、b、c、d,令所述四组气缸连接架分别为a、b、c、d,则a到a的距离为线段aa,b到b的距离为线段bb,c到c的距离为线段cc,d到d的距离为线段dd,aa=bb=cc=dd。
12.优选的,令若干个所述第二红外传感器为e,令环形薄壁高速飞行器壳体接触并挤压吸盘的接触点为e,则若干个e到e的距离相等。
13.优选的,所述机床床体内设有第一红外传感器和第二红外传感器所射频红外光线的处理器,所述处理器与第一气缸和第二气缸电性连接。
14.优选的,所述吸盘由透明塑胶制成。
15.本发明与现有技术相比,具有以下有益效果:
16.(1)、该环形薄壁高速飞行器壳体的加工设备,通过设置有四组第一红外传感器,通过测量四组第一红外传感器的aa、bb、cc、dd的距离,通过调节第二气缸的距离调节aa、bb、cc、dd以使aa=bb=cc=dd成立,可使环形薄壁高速飞行器壳体到各处夹持装置夹臂的距离相等,保证环形薄壁高速飞行器壳体与机床床体的同轴度。
17.(2)、该环形薄壁高速飞行器壳体的加工设备,通过测量若干个ee的距离,以保证第二红外传感器到环形薄壁高速飞行器壳体的距离相等,保持固定杆杆体和吸盘与环形薄壁高速飞行器壳体各处夹持强度相等,保持环形薄壁高速飞行器壳体壁厚的均匀性。
18.(3)、该环形薄壁高速飞行器壳体的加工设备,通过设置有弹簧板和螺栓,可对弹簧进行更换,从而保证夹持装置扩张杆正常的使用效果,延长夹持装置扩张杆的使用寿命。
附图说明
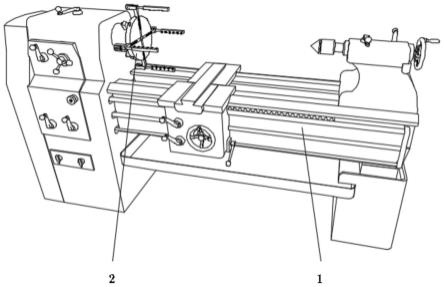
19.图1为本发明的结构示意图;
20.图2为本发明可调节定轴夹持装置的结构示意图;
21.图3为本发明机床夹盘的拆分结构示意图;
22.图4为本发明夹持装置夹臂的结构示意图;
23.图5为本发明机床床体的拆分结构示意图;
24.图6为本发明夹持装置扩张杆的拆分结构示意图;
25.图7为本发明a的放大图;
26.图8为本发明b的放大图;
27.图9为本发明第一红外传感器工作原理图;
28.图10为本发明第二红外传感器工作原理图;
29.图中:1、机床床体;11、机床卡盘;2、可调节定轴夹持装置;3、机床夹盘;31、夹盘滑道;32、夹盘螺孔;33、传感器射频槽;34、第一红外传感器;4、夹持装置夹臂;41、第一气缸;42、气缸连接架;5、调节螺杆;6、夹持装置扩张杆;61、第一扩张杆;62、第二扩张杆;63、扩张活动杆;64、弹簧;65、弹簧板;66、弹簧板槽;67、螺栓;68、螺栓槽;69、第二气缸;7、夹持装置固定杆;71、固定杆杆体;72、吸盘;73、第二红外传感器;74、射频腔;75、钢化玻璃。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.请参阅图1-图10所示,本发明提供如下技术方案:一种环形薄壁高速飞行器壳体的加工设备,其特征在于:包括机床床体1和可调节定轴夹持装置2,机床床体1通过机床卡盘11与可调节定轴夹持装置2活动连接,可调节定轴夹持装置2内设有机床夹盘3和夹持装置夹臂4,夹持装置夹臂4以机床夹盘3圆心为几何中心阵列分布于机床夹盘3的外侧,夹持装置夹臂4内设有夹持装置扩张杆6和夹持装置固定杆7,夹持装置夹臂4通过夹持装置固定杆7与环形薄壁高速飞行器壳体固定连接;机床夹盘3的内部开设有容置夹持装置夹臂4活动的夹盘滑道31,夹盘滑道31的内部开设有容置第一红外传感器34的传感器射频槽33,夹持装置扩张杆6通过气缸连接架42固连有第一气缸41,第一气缸41穿过夹持装置扩张杆6与夹持装置固定杆7固连,气缸连接架42的底部与夹持装置固定杆7的底部齐平,第一红外传感器34的输出端正对气缸连接架42底部。
32.进一步的,夹持装置固定杆7包括固定杆杆体71,固定杆杆体71的内部开设有容置第二红外传感器73的射频腔74,夹持装置固定杆7的外部固连有吸盘72,第二红外传感器73的输出端正对吸盘72。
33.进一步的,夹持装置扩张杆6包括第一扩张杆61、第二扩张杆62和扩张活动杆63,第二扩张杆62的内部固连有第二气缸69,第二气缸69的输出端与扩张活动杆63固连,扩张活动杆63远离第二气缸69的一端与第一扩张杆61固连。
34.进一步的,扩张活动杆63的一侧设置有弹簧64,弹簧64的两端均设置有弹簧板65,第一扩张杆61和第二扩张杆62的内部均开设有容置弹簧板65的弹簧板槽66,弹簧板槽66的一侧开设有螺栓槽68,弹簧板65通过螺栓67与螺栓槽68栓接。
35.进一步的,射频腔74的一侧开设有钢化玻璃75,第二红外传感器73的输出端穿过钢化玻璃75正对吸盘72。
36.进一步的,包括调节螺杆5,机床夹盘3内部开设有夹盘螺孔32,夹盘螺孔32与调节螺杆5相适配,调节螺杆5的一端穿过夹盘螺孔32与扩张活动杆63栓接。
37.进一步的,第一红外传感器34设置有四组,气缸连接架42设置有四组,第一红外传感器34与气缸连接架42一一对应,令四组第一红外传感器34分别为a、b、c、d,令四组气缸连接架42分别为a、b、c、d,则a到a的距离为线段aa,b到b的距离为线段bb,c到c的距离为线段cc,d到d的距离为线段dd,aa=bb=cc=dd。
38.进一步的,令若干个第二红外传感器73为e,令环形薄壁高速飞行器壳体接触并挤压吸盘72的接触点为e,则若干个e到e的距离相等。
39.进一步的,机床床体1内设有第一红外传感器34和第二红外传感器73所射频红外光线的处理器,处理器与第一气缸41和第二气缸69电性连接。
40.进一步的,吸盘72由透明塑胶制成。
41.工作时,首先将可调节定轴夹持装置2通过机床卡盘11与机床床体1夹持,然后利用调节螺杆5将夹持装置夹臂4固定住,接着驱动机床床体1的处理器工作使四组第一红外
传感器34工作以进行aa、bb、cc、dd的测距作业,若aa=bb=cc=dd不成立,则调节aa、bb、cc或dd的长度以使aa=bb=cc=dd成立,同理,也可利用机床床体1的处理器进行若干个ee的测距作业,以保证第二红外传感器73到环形薄壁高速飞行器壳体的距离相等,保证环形薄壁高速飞行器壳体的夹持稳定度和与机床床体1的同轴度。
42.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1