基板旋转装置的制作方法
基板旋转装置
1.相关申请的交叉引用
2.本国际申请要求2019年10月15日在日本专利局提交的日本发明专利申请第2019-188681号的优先权,所述日本发明专利申请的全部内容通过引用而并入本文。
技术领域
3.本公开涉及用于成膜的基板旋转装置。
背景技术:
4.已知一种薄膜蒸镀设备,其具备透镜保持器,该透镜保持器将多个透镜保持为均可以自如旋转,以便在多个透镜上形成厚度均匀的薄膜(例如参照专利文献1)。在该薄膜蒸镀设备中,当透镜保持器旋转时,通过行星齿轮机构使透镜在透镜保持器上旋转。由此,透镜在进行自转的同时配合着透镜保持器的旋转而进行公转。
5.现有技术文献
6.专利文献
7.专利文献1:日本专利特开平6-192835号公报
技术实现要素:
8.发明要解决的问题
9.在光学和半导体领域所使用的成膜装置中,通常会在基板上均匀地形成薄膜。如果可以在较大的基板上形成膜厚均匀的薄膜,就可以降低成膜的成本并且可以提高产品的生产率。
10.然而,作为飞散颗粒从蒸镀源等膜材料源散发的膜材料相对于基板的空间分布并非均匀。基板中试图形成薄膜的面积越大,不均匀性将越恶化。
11.因此,以往利用膜厚修正板将形成在基板上的厚度不均匀的薄膜整平,从而使膜厚均匀化。然而,在利用膜厚修正板使膜厚均匀化的方法中,必须将膜厚修正板以高精度安装在基板上,此外,还需要根据飞散颗粒的空间分布来重新制作膜厚修正板。
12.如专利文献1所述,通过在成膜时使透镜等成膜对象的基板进行公转以及自转的技术,也能够抑制飞散颗粒的不均匀的空间分布的影响,并且能够在基板上形成大致均匀的薄膜。但是,即使采用该技术,在薄膜的均匀性上尚存在改善的空间。
13.因此,本公开通过若干实施方式而优选提供一种与以往相比更适当地在基板上形成厚度均匀的膜的技术。
14.解决问题的技术方案
15.根据若干实施方式,提供了一种用于成膜的基板旋转装置。基板旋转装置具备主旋转机构、副旋转机构以及导引结构。主旋转机构以第一旋转轴为中心进行旋转。
16.主旋转机构包括副旋转机构。副旋转机构随着主旋转机构的旋转而绕第一旋转轴进行公转,并且副旋转机构以第二旋转轴为中心进行自转。副旋转机构具有支承作为成膜
对象的基板的支承结构。支承结构以第二旋转轴为中心进行旋转。第二旋转轴在对应于第一旋转轴的径向上位移。
17.导引结构设置在第一旋转轴的周围,并且控制副旋转机构的公转运动。导引结构具有在对应于第一旋转轴的周向上延伸的接触面。导引结构控制第二旋转轴在径向上的位移,并且当接触面与副旋转机构接触时,导引结构使副旋转机构在沿着接触面的轨道上进行公转运动。
18.如以往的在使用行星齿轮机构使作为成膜对象的基板的支承结构进行公转以及自转的方法中,公转轨道为正圆的轨道。本公开的发明人发现了该圆形轨道阻碍了在基板上以高精度形成均匀的膜厚。
19.根据上述若干实施方式的基板旋转装置,由于能够通过导引结构来控制支承结构的公转轨道,因此,支承结构的公转轨道不限于如行星齿轮机构那样的与齿轮形状相对应的正圆。即,根据若干实施方式的基板旋转装置,通过使导引结构形成为除正圆以外的形状,而能够实现除正圆以外的公转轨道。
20.因此,根据若干实施方式,可以提升支承结构和基板的旋转运动的设计自由度。该设计自由度能够使成作为成膜对象的基板内的每个点的位置相对于膜材料的空间分布产生位移,以消除膜材料的空间分布的不均匀性。因此,根据若干实施方式,能够提供可在基板上以高精度形成均匀的薄膜的成膜用基板旋转装置。
21.根据若干实施方式,接触面可以是导引结构所具有的面向第一旋转轴的内周面。内周面可以限制副旋转机构朝径向的外侧位移。
22.在主旋转机构的旋转系统中朝径向外侧对副旋转机构作用离心力。即,副旋转机构欲朝径向外侧位移。如果通过导引结构的内周面与副旋转机构接触来限制因离心力引起的位移,则能够使副旋转机构在沿着导引结构的内周面的轨道上稳定地进行公转,并且能够以高精度控制支承结构的公转运动。该高精度的控制有助于形成均匀的膜厚。
23.根据若干实施方式,主旋转机构可以具有以第一旋转轴为中心进行旋转的旋转板。旋转板可以具有沿着径向的缝隙。副旋转机构可以具有贯穿缝隙的第二旋转轴。
24.副旋转机构可以在第二旋转轴的第一端部具有旋转台,旋转台具有支承结构。副旋转机构可以在第二旋转轴的位于第一端部的相反侧的第二端部具有在导引结构的接触面上行驶的轮子。在轮子随着公转运动而在接触面上行驶期间,轮子和通过第二旋转轴与轮子连结的旋转台可以进行自转。
25.根据该基板旋转装置,能够通过比较简单的机械结构来实现副旋转机构沿着导引结构进行公转以及自转。
26.根据若干实施方式,副旋转机构可经由弹簧与主旋转机构连结,弹簧朝使得副旋转机构压靠接触面的方向对副旋转机构施力。该施力能够使副旋转机构沿着导引结构的接触面稳定且准确地进行公转,从而提高膜厚的均匀性。
27.根据若干实施方式,基板旋转装置可以构成为,副旋转机构在椭圆轨道上绕第一旋转轴进行公转运动。根据若干实施方式,导引结构的接触面可以在周向上呈椭圆形而配置。
28.根据若干实施方式,导引结构的接触面可以在周向上呈非点对称的环形而配置。副旋转机构可以在非点对称的轨道上绕第一旋转轴进行公转运动。该公转轨道有利于形成
均匀的膜厚。这是由于膜材料的空间分布大多显示出呈点对称分布的缘故。
29.根据若干实施方式,导引结构可以具备滑动机构,滑动机构用于使接触面的至少一部分在径向上移动。根据具备滑动机构的基板旋转装置,使用者能够通过滑动机构来调整公转轨道,从而能够以更高的精度在基板上形成均匀的膜厚。
附图说明
30.图1是具备若干实施方式的基板旋转装置的介电质膜蒸镀设备的示意图。
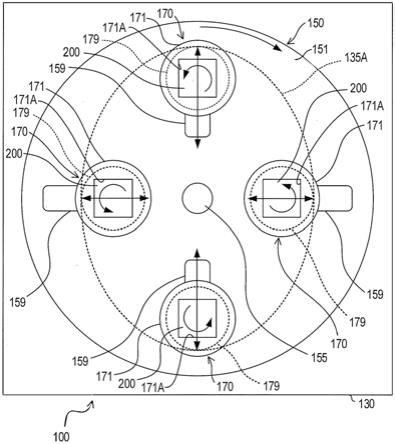
31.图2是若干实施方式的基板旋转装置的概略俯视图。
32.图3是若干实施方式的导引装置的概略俯视图。
33.图4是若干实施方式的基板旋转装置的沿着旋转轴方向的概略剖视图。
34.图5是若干实施方式的安装有副旋转装置的主旋转装置的概略后视图。
35.图6是若干实施方式的副旋转装置在与缝隙的纵长方向正交的剖面处的概略剖视图。
36.图7a是说明若干实施方式的公转运动和自转运动的图。
37.图7b是说明若干实施方式的公转运动和自转运动的图。
38.图8是示出有关膜厚的实验结果的图。
39.图9是示出若干实施方式的导轨在周向上的外形的图。
40.图10是示出若干实施方式的具备滑动机构的导轨的结构的图。
41.附图标记的说明
[0042]1…
介电质膜蒸镀设备;10
…
蒸镀源;15
…
容器;100
…
基板旋转装置;
[0043]
110
…
马达;130
…
导引装置;131
…
基底板;133
…
滚珠轴承;
[0044]
135
…
轴;137
…
导引构件;137a
…
导轨;137b
…
内周面;137c
…
底板;
[0045]
137d
…
孔;139a
…
导轨;141
…
第一滑动机构;142
…
第二滑动机构;
[0046]
150
…
主旋转装置;151
…
主旋转板;155
…
轴;159
…
缝隙;
[0047]
170
…
副旋转装置;171
…
旋转台;171a
…
凹部;171b
…
空洞部;
[0048]
175
…
轴;179
…
轮子;179a
…
轮子主体;179b
…
0形环;
[0049]
180
…
单轴滑动载台;181
…
载台主体;181a
…
滚珠轴承;
[0050]
185
…
弹簧结构;185a
…
弹簧;185b
…
弹簧固定部;
[0051]
190
…
基板旋转装置;200
…
基板;rs
…
光接收传感器。
具体实施方式
[0052]
以下参照附图说明本公开的若干实施方式。
[0053]
若干实施方式的基板旋转装置100是用于介电质膜蒸镀或晶体生长的成膜用基板旋转装置100。基板旋转装置100从马达110接收动力并使作为成膜对象的基板200进行公转以及自转,以协助在基板200上形成均匀的薄膜。
[0054]
基板200的示例除了光学基板之外,还包括用于制造半导体装置的基板。例如,为了对光学基板赋予预定的光学特性,而对光学基板实施薄膜形成。光学基板的示例除了平面基板之外,还包括具有凸面或凹面的基板。
[0055]
如图1所示,基板旋转装置100例如配置在具有多个蒸镀源10的介电质膜蒸镀设备
1的容器15内。在基板旋转装置100中,基板200的成膜对象面与蒸镀源10相对。
[0056]
基板旋转装置100从马达110接收动力以使基板200在容器15内进行公转以及自转。容器15保持真空状态。在该状态下,膜材料从蒸镀源10汽化,并且汽化的膜材料作为飞散颗粒在容器15内飞散。图1中的虚线示意性地示出飞散颗粒的扩散,并且箭头示意性地示出飞散方向。
[0057]
通过使飞散颗粒附着在基板200上,而在基板200上形成薄膜。当在基板200上层叠种类不同的薄膜时,多个蒸镀源10将依顺序工作。每个蒸镀源10在工作期间使对应的膜材料汽化并使其飞散,以便在基板200上形成对应种类的薄膜。
[0058]
从每个蒸镀源10飞散到基板200上的膜材料的空间分布显示为大致呈点对称的几何形状。越靠近中心,膜材料的飞散量越多,越远离中心,膜材料的飞散量越少。
[0059]
因此,在基板200上所形成的薄膜的膜厚λ通常显示出依据函数λ=t(r)=to+k1
·
r+k2
·
r2+k3
·
r3+
…
的分布,也就是说,显示出依据具有以距中心的距离r作为变量的单变量多项式的分布。在基板200不进行旋转运动而静止的状态下形成薄膜时,系数k1,k2,k3,
…
将依循膜材料的飞散分布。
[0060]
在若干实施方式的基板旋转装置100中,通过使基板200进行公转以及自转,而使基板200上的每个点相对于膜材料的飞散分布产生位移。由此,使系数k1,k2,k3,
…
趋近于零,并且膜厚λ的分布t(r)仅表示为常数项to,从而显示出与距离r无关的均匀的膜厚λ。并且相对于基板200的较大面积而形成显示出该分布t(r)的均匀的薄膜。
[0061]
基板旋转装置100通过形成椭圆等非正圆的非点对称的公转轨道来实现形成比以往更均匀的薄膜。由于该公转轨道,基板旋转装置100被构造为如图2所示。
[0062]
图2所示的基板旋转装置100具备导引装置130、安装在导引装置130上的主旋转装置150、以及安装在主旋转装置150上的多个副旋转装置170。
[0063]
图2中的虚线透示出位于比基板旋转装置100的表面靠近背侧处的部位的一部分。图2中的箭头表示当主旋转装置150进行旋转运动时副旋转装置170局部性进行旋转运动以及线性运动的情况。
[0064]
如图3和图4所示,导引装置130具备基底板131、经由滚珠轴承133以可旋转的方式保持在基底板131上的轴135以及导引构件137。
[0065]
导引构件137具有导轨137a和底板137c,其中,底板137c具有形状与导轨137a的轮廓相同的周缘。如图4所示,导轨137a以从底板137c的周缘突出的方式而设置。
[0066]
底板137c具有供轴135穿过的孔137d。在轴135贯穿孔137d的状态下,例如通过螺纹固定将导引构件137固定到基底板131上。
[0067]
在导引构件137固定在基底板131的状态下,导轨137a在轴135的周围呈非点对称的环形而配置。根据图3的示例,导轨137a在周向上具有椭圆形的轮廓。
[0068]
主旋转装置150被保持为能够相对于导引装置130进行旋转。如图2和图4所示,主旋转装置150具有主旋转板151和轴155。轴155沿着主旋转板151的法线方向从主旋转板151的中心朝导引装置130延伸。轴155与主旋转板151连结,并且还与导引装置130的轴135的第一端连结。
[0069]
轴135的第二端突出到导引装置130的背面。轴135的第二端与马达110连结。由此,主旋转装置150以主旋转板151接收来自马达110的动力并以轴155为中心进行旋转的方式
配置在导引装置130上。
[0070]
如图2所示,主旋转板151以90度的间隔而具有沿着径向延伸的呈长条形的缝隙159。副旋转装置170的数量与缝隙159的数量相同。副旋转装置170各自贯穿相对应的缝隙159。
[0071]
如图2、图4、图5和图6所示,副旋转装置170各自具有旋转台171、轴175、轮子179、单轴滑动载台180和弹簧结构185。单轴滑动载台180配置在与图4的虚线相对应的位置。在图4中省略了单轴滑动载台180的细节。
[0072]
轴175贯穿缝隙159和单轴滑动载台180。单轴滑动载台180沿着缝隙159而设置,并固定在主旋转板151的背面。
[0073]
单轴滑动载台180将轴175保持为能够沿着缝隙159在主旋转板151的径向上移动。单轴滑动载台180具备载台主体181,载台主体181包含用以将轴175保持为能够旋转的滚珠轴承181a。载台主体181沿着缝隙159在主旋转板151的径向上滑动。
[0074]
轴175的第一端从主旋转板151的表面突出。轴175的第一端在旋转台171的背侧与旋转台171的中心连结。由此,旋转台171以能够以轴175为中心进行旋转的状态且以能够随着轴175的移动而沿主旋转板151的径向进行线性运动的状态配置在主旋转板151的表侧。
[0075]
旋转台171具有圆形的轮廓,并且旋转台171的表侧具有支承矩形的基板200的支承结构。具体而言,旋转台171在表侧具有与基板200的形状相对应的矩形的凹部171a,以支承嵌入在凹部171a中的基板200。
[0076]
如图4和图6所示,旋转台171具有中空的内部结构,并且从基板200的背侧支承基板200的边缘。与旋转台171连结的轴175为中空的筒状构件。旋转台171的空洞部171b连通到轴175的与第一端相反的第二端。
[0077]
轴175的第二端位于主旋转板151的背侧。在轴175的第二端,以覆盖轴175的开口部的方式而设置有光接收传感器rs。光接收传感器rs接收从基板200上照射并经过基板200和上述空洞部171b而传播来的测量光,并输出与该接收到的测量光的受光强度相对应的信号。由光接收传感器rs输出的信号用于测量在基板200形成的薄膜的厚度。
[0078]
轴175的第二端与轮子179的中心连结。这样,轴175的第一端连结旋转台171,并且轴175的第二端连结轮子179,由此,使得旋转台171配合着轮子179的旋转而以轴175为中心进行旋转(即自转)。
[0079]
在轮子179的结构中,在具有圆形轮廓的轮子主体179a的侧壁安装有o形环179b。将轮子179配置在使得o形环179b与导轨137a的内周面137b接触的高度处,以便轮子179在导轨137a的内周面137b上行驶。
[0080]
即,当主旋转板151旋转时,轮子179配合着旋转台171因主旋转板151的旋转而产生的公转运动而在导轨137a的内周面137b上行驶。
[0081]
为了实现轮子179稳定地在导轨137a的内周面137b上行驶而不会从导轨137a的内周面137b脱离并且不会出现打滑的状态,而设置弹簧结构185。
[0082]
弹簧结构185具备隔着缝隙159且沿着缝隙159的纵长方向而配置的两个弹簧185a。两个弹簧185a的第一端在比缝隙159靠近主旋转板151的径向外侧处与弹簧固定部185b连结。弹簧固定部185b固定在主旋转板151的背面。
[0083]
两个弹簧185a的位于第一端的相反侧的第二端与单轴滑动载台180的载台主体
181连结。在未作用拉力的状态下,弹簧185a的长度充分小于缝隙159的长度。
[0084]
通过该弹簧结构185,使得轮子179经由载台主体181和轴175而承受来自弹簧185a的朝向主旋转板151的径向外侧的拉力,并压靠导轨137a的内周面137b。
[0085]
即,轮子179受到来自弹簧185a的朝向径向外侧的作用力,而压靠导轨137a的内周面137b。由此,轮子179以基本不会在导轨137a的内周面137b打滑或基本不会脱离导轨137a的状态,一边进行自转一边在沿导轨137a的轨道上进行公转。
[0086]
当导轨137a呈图3所示的椭圆形时,副旋转装置170的轮子179以及连动于轮子179的旋转台171在图7a和图7b所示的椭圆轨道进行公转,并同时进行自转。若主旋转板151从图7a所示的配置有轮子179的状态起沿箭头方向旋转了角度α,则轮子179一边描绘椭圆轨道,一边朝图7b所示的位置移动。在图7a和图7b中,用虚线示出主旋转板151。
[0087]
当主旋转板151旋转时,通过伴随着离心力、由弹簧结构185施加的作用力以及从导轨137a施加给轮子179的阻力而产生的力学作用,而使旋转台171和轮子179在主旋转板151的径向上的位置被控制在沿循着导轨137a的位置。也就是说,导轨137a通过与副旋转装置170的轮子179接触来控制轮子179和轴175在上述径向上的位置,从而控制旋转台171的公转运动。
[0088]
若干实施方式的基板旋转装置100使用导轨137a来控制公转轨道,由此,使支承基板200的旋转台171沿着非点对称的椭圆轨道进行公转,并且使旋转台171进行自转。通过该公转以及自转,使基板200上的每个点以横穿来自蒸镀源10的膜材料的不均匀的空间分布的方式而进行复杂的位移,从而在基板200的表面形成厚度均匀的薄膜。
[0089]
为了进行比较实验,在主旋转板151上相邻的两个副旋转装置170之间设置了相对于主旋转板151固定不动的基板保持台,在该状态下,分别对保持在旋转台171上的基板200和保持在基板保持台上的基板200在基板旋转装置100进行旋转的同时形成薄膜时的膜厚λ进行了测量,并将测量的结果显示在图8所示的图中。
[0090]
图中的横轴表示基板200的表面的位置。图中的纵轴表示在基板200的表面上所形成的薄膜的膜厚λ。实线所示的图表示载置在基板保持台上的基板200上的膜厚λ的空间分布,虚线所示的图表示载置在若干实施方式的旋转台171上的基板200上的膜厚λ的空间分布。由此可以获知:若干实施方式的基板旋转装置100能够以极高的精度在基板200上形成厚度(λ)均匀的薄膜。
[0091]
如上所述,在若干实施方式的基板旋转装置100中,与主旋转机构相对应的主旋转装置150以第一旋转轴(轴135、155)为中心进行旋转。
[0092]
与副旋转机构相对应的副旋转装置170的旋转台171、轴175和轮子179随着主旋转板151的旋转而绕第一旋转轴(轴135、155)进行公转,并且以第二旋转轴(轴175)为中心进行自转。旋转台171、轴175以及轮子179设置在主旋转板151上。
[0093]
在副旋转装置170中,具有基板200的支承结构(凹部171a)的旋转台171以第二旋转轴(轴175)为中心进行旋转,并且第二旋转轴(轴175)在主旋转板151的径向上进行位移。
[0094]
构成导引结构的导轨137a具有用于控制副旋转装置170的公转运动的内周面137b。内周面137b在对应于第一旋转轴(轴135、155)的周向上延伸,并具有非点对称的环形轮廓,且面向第一旋转轴。
[0095]
导轨137a使内周面137b与副旋转装置170的轮子179接触,从而限制轮子179朝主
旋转板151的径向外侧位移。通过该限制,导轨137a以使得副旋转装置170在与内周面137b相对应的轨道(沿着内周面137b的轨道)进行公转的方式,来控制第二旋转轴(轴175)以及旋转台171在沿着缝隙159的径向上的位移。
[0096]
如上所述,若干实施方式的基板旋转装置100不使用膜厚修正板或行星齿轮机构而实现伴随旋转台171的自转而进行非点对称的公转运动,从而使基板200的每个点相对于从蒸镀源10飞散的膜材料的空间分布进行位移。因此,从实验结果也可以获知:能够以高精度在基板200的表面形成均匀的薄膜。
[0097]
在使用行星齿轮机构的成膜中,由于公转轨道为正圆,因此,难以将函数t(r)的偶数函数项的影响,即,次数n为偶数的rn项的影响以使得其系数接近零的方式而消除。相对于此,在若干实施方式中,由于能够使旋转台171在非点对称的椭圆形的公转轨道进行公转,因此可以消除偶数函数项的影响,从而能够实现均匀的膜厚λ。
[0098]
此外,在使用行星齿轮机构的成膜中,由于公转轨道为正圆,因此,当使用飞散颗粒的空间分布不同的多个蒸镀源10时,难以使通过每个蒸镀源10形成的薄膜全部形成为均匀的薄膜。根据若干实施方式的基板旋转装置100,还可以抑制这种不均匀性。即,根据基板旋转装置100,与以往相比能够使利用多个蒸镀源10的每一个所形成的薄膜形成得更加均匀。
[0099]
进一步而言,行星齿轮机构容易在旋转时产生振动,但是,根据若干实施方式的基板旋转装置100,还能够抑制旋转时的振动。此种对振动的抑制有助于形成高精度的膜厚。
[0100]
在若干实施方式中,使用导轨137a代替齿轮来控制公转轨道,从而能够构建易于制造规模较大的基板旋转装置100、且可以在较大的基板200形成均匀的膜厚的系统。因此,根据若干实施方式,能够降低成膜的成本,并且能够提高产品的生产率。
[0101]
在若干实施方式中,利用通过弹簧结构185施加的作用力以及离心力使副旋转装置170的轮子179以不脱离且不打滑的方式压靠于导轨137a的内周面137b。并且,利用轮子179的旋转使旋转台171以第二旋转轴(轴175)为中心进行旋转。由此能够以高精度控制基板200的旋转运动,并且能够形成高精度的薄膜。
[0102]
根据若干实施方式,通过改变导轨137a的周向形状,还能够容易地形成除图3所示的椭圆轨道以外的各种公转轨道。椭圆率不限于图3的示例。例如,公转轨道可以是椭圆率a/b为0.99以下的任意的椭圆。在此所述的a为椭圆的最短距离,b为椭圆的最长距离。
[0103]
如图9所示,导轨137a可以改为具有除椭圆形以外的非点对称的环形轮廓的导轨139a。导轨139a可以在基底板131上以沿着周向弯曲的方式而配置。
[0104]
准备导轨形状不同的多个导引构件137,并相对于基底板131更换这些导引构件137,由此,基板旋转装置100能够实现种类非常多的公转运动。
[0105]
可以在基板旋转装置100设置用于使导轨137a、139a能够移动的机构。如图10所示,基板旋转装置190具有第一滑动机构141和第二滑动机构142。第一滑动机构141使导轨139a的第一部分1391在对应于第一旋转轴的径向上滑动。第二滑动机构142使导轨139a的第二部分1392在对应于第一旋转轴的径向上滑动。第一滑动机构141和第二滑动机构142配置在导引装置130的基底板131上。导轨139a的第一部分1391和第二部分1392与底板以及导轨139a的其他部分分离。
[0106]
基板旋转装置190构成为导轨139a的一部分能够移动,并且基板旋转装置190具有
第一滑动机构141和第二滑动机构142,除此之外,能够以与上述实施方式的基板旋转装置100同样的方式构成基板旋转装置190。根据基板旋转装置190,能够为了实现膜厚的均匀化而调整旋转台171的公转轨道,因此能够实现形成更高精度的薄膜。
[0107]
上文对举例说明了若干实施方式中的基板旋转装置,不过,基板旋转装置不限于上述实施方式,能够采用各种方式。
[0108]
例如,可以在基板旋转装置中不设置弹簧结构185。也可以存在即使没有弹簧结构185,也能够利用离心力使轮子179充分压靠在导轨137a上的情况。另外,附图所示的基板旋转装置100为示意性的基板旋转装置,基板旋转装置100的各部分的尺寸或形状并不限于图示的情况。
[0109]
可以将上述实施方式中的一个构成元素所具有的功能分布到多个构成元素中。也可以将多个构成元素所具有的功能整合到一个构成元素中。可以省略上述实施方式的构成的一部分。由权利要求所记载的语句确定的技术思想中包含的所有方式皆为本公开的实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1