用于辊运输系统的载体、辊运输系统和具有辊运输系统的真空处理设备的制作方法
1.本公开内容的实施方式涉及一种用于在辊运输轨道上运输的载体,尤其是用于在真空处理设备中支撑基板或掩模的载体。本公开内容的进一步实施方式涉及一种真空处理设备,所述真空处理设备具有辊运输轨道,用于运输载体进出真空处理腔室。更特别地,本公开内容的实施方式涉及可用于垂直基板处理(诸如用于显示器生产的大面积基板上的材料沉积)的处理系统的用于运输载体的多种设备和方法。
背景技术:
2.用于在基板上进行层沉积的技术包括例如溅射沉积、物理气相沉积(pvd)、化学气相沉积(cvd)和热蒸发。已涂覆基板可用于若干应用和若干技术领域中。例如,已涂覆基板可用于显示装置的领域中。显示装置可用于制造电视机屏幕、计算机显示器、移动电话、其他手持装置等来显示信息。典型地,显示器是通过用不同材料的层堆叠涂覆基板来生产。
3.为了沉积层堆叠,可使用直列(in-line)处理模块布置。直列处理系统包括多个后续处理模块(诸如沉积模块)以及可选地进一步的处理模块(诸如清洁模块和/或蚀刻模块),其中处理方面随后地在处理模块中进行,使得多个基板可在直列处理系统中连续地或准连续地进行处理。
4.基板或掩模可由载体(即,用于承载基板的承载设备)承载。通常使用运输系统运输载体通过真空系统。运输系统可用于沿一个或多个运输路径运输其上设置有基板的载体。例如,至少两个运输路径可彼此靠近地设置在真空系统中,例如,用于在前进方向上运输载体的第一运输路径和用于在与前进方向相反的返回方向上运输载体的第二运输路径。替代地,可提供单一运输路径,用于在前进方向和返回方向中的任一个方向上运输载体。
5.获得通过真空系统的基板载体和/或掩模载体的准确且平稳的运输是有挑战性的。例如,在基于辊的运输系统中,即使是稍微错位的辊也可能导致被运输的载体冲击错位的辊,并导致辊的不均匀载荷。特定辊上的增加的载荷可能会导致颗粒产生的增加,从而使制造工艺劣化。因此,需要的是在减少或最小化颗粒产生的情况下在处理系统中运输载体。另外,挑战例如是以低成本提供用于高温真空环境的稳健载体运输系统。
6.因此,存在用于运输载体的改善的设备和方法以及提供克服现有技术的至少一些问题的改善的真空处理系统的持续需求。
技术实现要素:
7.鉴于上文,提供了用于在辊运输轨道上运输的载体,以及具有用于将所述载体运输进出真空处理腔室的辊运输轨道的真空处理设备。根据独立权利要求、说明书和附图,其他的方面、优点和特征变得显而易见。
8.根据本公开内容的一个方面,提供了一种用于在辊运输轨道上沿运输方向运输的载体,所述载体包括:第一辊接触表面,所述第一辊接触表面被配置为在所述辊运输轨道上
的至少一个第一辊上支撑所述载体,以及第二辊接触表面,所述第二辊接触表面被配置为在所述辊运输轨道上的至少一个第二辊上支撑所述载体;其中所述第一辊接触表面和所述第二辊接触表面在运输方向上分开,其中在所述第一辊接触表面和所述第二辊接触表面之间存在空间。
9.根据本公开内容的另一方面,提供了一种辊运输系统。所述辊运输系统包括辊运输轨道和根据本公开内容多个方面的载体,所述辊运输轨道包括多个辊。
10.根据本公开内容的又一方面,提供了一种用于将材料沉积在基板上的真空处理设备。所述真空处理设备包括至少一个真空处理腔室和根据本公开内容的多个方面的辊运输系统,所述辊运输系统用于运输根据本公开内容的多个方面的载体进出所述至少一个真空处理腔室。
11.本公开内容的多个方面提供了一种用于在辊运输轨道上运输的载体,当载体在辊运输轨道上运输时,所述载体降低了对错位的辊的冲击和载荷。此外,辊上的载荷更均匀地分布在辊运输轨道的辊上。辊上所减少的冲击和载荷减少了辊的磨损量和载体的辊接触面积,这导致减少了颗粒的产生。此外,根据本公开内容的多个方面的载体可以通过减小由于错位的辊所引起的载体俯仰角,而在辊运输轨道上更平稳和更有效地运输。
附图说明
12.为了可以详细地理解本公开内容的上述特征,可参照实施方式来得出以上简要地概述的本公开内容的更具体的描述。附图涉及本公开内容的实施方式并且描述如下:
13.图1示出了不具有错位辊的辊运输系统的示意性侧视图;
14.图2a至图2b示出了根据现有技术的具有错位辊的辊运输系统的示意性侧视图;
15.图3a至图3b示出了根据本文所描述的实施方式的辊运输系统的示意性侧视图;
16.图4a至图4b示出了根据本文所描述的实施方式的具有顺应性辊接触表面的辊运输系统的详细侧视图;以及
17.图5示出了根据本文所描述的实施方式的辊运输系统的示意性横截面端视图。
具体实施方式
18.现将详细地参照各个实施方式,这些实施方式的一个或多个示例示出于各图中。每个示例是作为解释提供的,并不意味着作为限制。例如,作为一个实施方式的一部分示出或描述的特征可以在任何其他实施方式上使用或与任何其他实施方式结合使用,以产生又一实施方式。本公开内容旨在包括此类修改和变化。
19.在以下对附图的描述中,相同的附图标记指代相同或相似的元件。通常情况下,仅仅对相对于各个实施方式的差异进行描述。除非另有说明,一个实施方式中的部分或方面的描述同样可以适用于另一实施方式中对应的部分或方面。
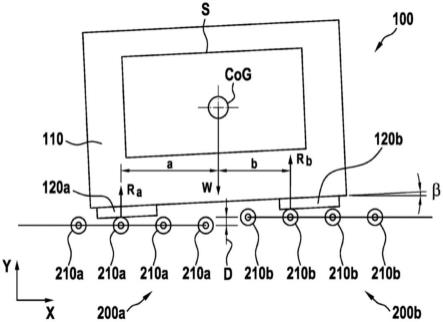
20.首先将参照图1,图1示出了现有技术中典型的用于运输载体100的辊运输系统的示意性侧视图。辊运输系统包括至少一个辊运输轨道200a、200b,其中,辊运输轨道200a、200b包括多个辊210a、210b。
21.在本公开内容中,提供了载体100,该载体用于支撑平面物体,一般是平面基板或平面掩模。然而,本公开内容并不限于此,载体100可被配置成用于支撑一般在真空处理设
备中使用的其他产品或工具。载体100包括载体主体110,该载体主体构成载体100的结构。载体主体110可以包括基板表面,基板s可以支撑在所述基板表面上。基板表面可以包括静电卡盘,所述静电卡盘被配置用于通过静电将基板s保持在基板表面上。
22.辊运输轨道200a、200b主要用于支撑载体100的支撑重量w,同时还提供用于沿辊运输轨道200a、200b的长度移动载体100的有效装置。辊210a、210b可以包括至少一个轴承,例如滚动轴承、流体轴承或磁轴承,使得辊210a、210b可以低摩擦地旋转。
23.在一般的现有技术中,载体100包括单个辊接触表面120。辊接触表面120沿载体主体110的下表面延伸并且接触辊运输轨道200a、200b的辊210a、210b。辊接触表面120通常沿载体主体110的整个长度或基本上整个长度延伸,并且接触辊运输轨道200a、200b的至少两个辊210a、210b,从而支撑载体100的支撑重量w。载体100具有重心cog。
24.在本公开内容的上下文中,将参照载体100的“支撑重量w”。支撑重量w是指由辊210a、210b支撑的载体100的重量部分,特别是由辊运输轨道200a、200b支撑的重量部分。所支撑的重量w可以对应于载体100的全部重量,即载体100的全部重量由辊运输轨道200a、200b支撑,或者支撑重量w可以对应于载体100的部分重量,即,仅有载体100的全部重量的一部分由辊运输轨道200a、200b支撑。后一种情况可以对应于辊运输系统的其他部件被配置成用于支撑载体100的一部分重量的情况。在本公开内容的实施方式中,可以提供一个或多个磁性引导元件用于沿横向方向z无接触地引导载体100,并且由一个或多个磁性引导元件施加的磁吸引力可以作用在垂直方向y上,以补偿和支撑载体100的至少一部分重量。
25.如图1示例性地所示,第一辊运输轨道200a设置在阀300的一侧,第二辊运输轨道200b设置在阀300的另一侧。阀300可以设置在两个相邻的真空处理腔室之间,例如,用于将载体100从第一真空处理腔室运输到第二真空处理腔室。第一真空处理腔室和第一辊运输轨道200a可以设置在第一处理模块中,而第二真空处理腔室和第二辊运输轨道200b可以设置在第二处理模块中。根据所执行的处理,相应的第一模块和第二模块可以布置在真空处理设备中,使得载体100可以运输通过真空处理设备。
26.在本公开内容的上下文中,多个方向的定义如下。对应于运输方向x的第一方向布置在基本水平的方向上。运输方向x在图1中被示出为在途中水平对准。对应于垂直方向y的第二方向布置在与运输方向x基本垂直的方向上,并且与重力方向基本对准。垂直方向y在图1中被示出为在图中垂直对准。对应于横向方向z的第三方向布置在与运输方向x基本垂直并且与垂直方向y基本垂直的方向上。横向方向z将在图3中被示出为垂直于图面。此外,在本公开内容中,对运输轴、垂直轴或横向方向轴的任何描述应当理解为分别在运输方向x、垂直方向y或横向方向z上延伸的轴。
27.辊运输轨道200a、200b被配置成用于在运输方向x上引导或运输载体100。在本公开内容的上下文中,运输方向x被定义为运输载体100的方向。在附图中,运输方向x被示为从左指向右,换言之,载体100被从左向右地引导或运输。该运输方向x可以被认为是前向运输方向,即,载体100的单向运输。通常情况下,可以提供一对辊运输轨道200a、200b,其中每个辊运输轨道200a、200b被配置成用于载体100在相反方向的单向运输。然而,本公开内容不限于此,载体100可以在前向运输方向或反向运输方向上被引导或运输,即,载体100的双向运输。在这种情况下,可以提供单个辊运输轨道200a、200b,其中单个辊运输轨道200a、200b被配置成用于载体100的双向运输。
28.载体100可以具有前端和后端。在本公开内容的上下文中,载体100的前端是载体100的面向运输方向x的端部,即,载体100的前端在沿前向运输方向移动时位于载体100的前面。相反地,载体100的后端为载体100的与运输方向x相反的一端,即,载体100的后端在沿前向运输方向移动时位于载体100的后部。然而,如上所述,载体100可以沿前向运输方向或反向运输方向运输。在载体100沿反向运输方向运输的情况下,载体100的前端在沿反向运输方向移动时位于载体100的后端,即,载体100的面向与运输方向x相反的端部,并且后端在沿反向运输方向移动时位于载体100的前端,即,载体100面向运输方向x的端部。
29.承载在载体100的基板s可以是用于制造显示器的大面积基板,具有诸如几平方米的尺寸。替代地,基板s可以是半导体晶片,也可以包括多个晶片。
30.特别地,基板s可以是具有至少1m2尺寸的大面积基板。尺寸可以是从大约1.375m2(1.1m*1.25m-gen 5)到大约15m2,更具体地从大约5m2到大约9m2或者甚至高达15m2。例如,基板可以是gen 7.5,对应于约4.39m2(1.95m*2.25m)的面积;可以是gen 8.5,对应于约5.7m2(2.2m*2.5m)的面积;或为gen 10,对应约9m2(2.88m*3.13m)的面积。甚至可以实现更大的世代,诸如gen 11和gen 12。
31.载体100在垂直方向y上的尺寸可以为1m或更大,特别是2m或更大,或者甚至3m或更大。载体100在对应于运输方向x的纵向方向上的尺寸可以为1m或更大,特别是2m或更大,或者甚至3m或更大。载体100可以具有5m2或更大,特别是9m2或更大,或者甚至15m2或更大的尺寸。
32.本文描述的一些实施方式涉及以“垂直或接近垂直的取向”运输载体100的概念。在本公开内容的上下文中,载体100的垂直取向是指载体100对准为在与重力方向基本平行的方向上延伸,即,基本平行于垂直方向y。接近垂直的取向可以为定义为偏离精确垂直度(后者由重力定义)最多15度的角度的取向。在垂直或接近垂直的取向中,载体100可以以垂直站立取向或接近垂直站立的取向支撑基板。
33.然而,本公开内容不仅限于载体100被取向为垂直或接近垂直的取向。替代地,载体100可以被取向为水平或接近水平取向,即,其中载体100被对准为在与横向方向z基本平行的方向上延伸。在水平或接近水平方向上,载体100可以以水平放置或接近水平放置的取向支撑基板。
34.在本公开内容的上下文中,载体100用于支撑基板,但是本公开内容不限于此。替代地,载体100可以用于支撑掩模。根据可以与本文描述的其他实施方式组合的一些实施方式,载体100可以用于在真空处理设备中支撑基板或掩模。
35.载体100在图1中示出为在运输方向x上跨过阀300的过渡运动,从第一辊运输轨道200a运输至第二辊运输轨道200b。图1所示的情况被认为是所有辊210a、210b沿运输方向x完全对准的最佳情况。所有辊210a、210b的相应上表面被对准以处于相同的垂直高度。最佳情况进一步包括辊接触表面120沿运输方向x完全平坦。载体100示出为被示例性地由第一辊运输轨道200a的五个辊210a支撑,并且由于支撑载体100的五个辊210a中的每一个的最佳对准以及辊接触表面120的最佳平坦度,因此允许辊接触表面120接触五个辊210a的每一个。此外,由于第一辊运输轨道200a和第二辊运输轨道200b的最佳对准以及辊接触表面120的最佳平坦度,将要接触第二辊运输轨道200b的辊210b的载体100将被有效地运输,穿过阀300并且到达第二辊轨道200b上。
36.作为这种最佳情况的结果,反作用载荷r分布在与辊接触表面120接触的各个辊210a、210b上。通常情况下,在阀300内可以不放置任何运输部件,并且载体100可以是悬臂式地越过阀300。由此,随着载体100被运输穿过阀300,在第一辊轨道200a的最终辊210a上提供了更高的反作用载荷r。然而,没有单个辊承受过大的载荷,因为载体100的支撑重量w被充分分布在各个辊210a中的每一个上。
37.然而,由于各种因素,在实践中难以实现如图1中示例性所示的最佳情况。例如,辊210a、210b或辊接触表面120的磨损、辊210a、210b或辊接触表面120的制造差异、一个或多个辊210a、210b的非圆形度(non-circularity),或在安装或维护期间的辊210a、210b的不合适的对准可能导致至少一个辊210a、210b错位。
38.此外,保持真空处理设备的模块之间的最佳对准也可能是具有挑战性的,这可能导致第一辊运输轨道200a和第二辊运输轨道200b相对于彼此错位。当由于真空处理腔室的温度或真空压力的变化而发生相邻模块的膨胀和收缩时,会出现进一步的挑战,这潜在地导致第一辊运输轨道200a相对于第二辊运输轨道200b的可变错位。
39.即使可以克服与保持辊210a、210b的最佳对准相关的挑战,也可能出现与载体100有关的热问题。在辊接触表面120的平坦度方面面临额外的挑战,当载体100经受可变的热条件时,在载体100的整个长度上保持平坦度是具有挑战性的。载体110或辊接触表面120的热膨胀或收缩可能导致辊接触表面120翘曲,损害允许辊接触表面120与辊210a、210b之间的最佳接触的辊接触表面120的最佳平坦度。
40.现在将参照图2a,图2a示出了由具有错位模块的辊运输系统运输的载体100。特别地,辊运输系统包括在第一模块中的第一辊运输轨道200a和在第二模块中的第二辊运输轨道200b,其中第一模块和第二模块错位使得第一辊运输轨道200a和第二辊运输轨道200b偏移垂直距离d。
41.应当注意,出于说明目的,附图中示例性示出的错位量可能被夸大了。错位量可以使得垂直距离d显著小于图中所示的量。例如,错位量可以高达0.5mm的垂直距离d,特别是高达1.0mm的垂直距离,更特别地高达2.0mm的垂直距离。
42.当载体100从第一辊运输轨道200a穿过阀300运输到第二辊运输轨道200b时,相应的第一和第二辊运输轨道200a、200b之间的错位导致辊接触表面120现在仅接触两个辊210a、210b。
43.在这种情况下会产生诸多不利影响。首先,载体100的支撑重量w不再分布在大量的辊上,而是仅分布在两个辊上。辊210a、210b上的这种增加的载荷可能导致磨损增加,这可能进一步加剧继续操作的问题,并且可能在真空处理设备内部产生颗粒。其次,载体100会经受围绕横向轴的俯仰运动,其中整个载体100相对于运输方向x以俯仰角α俯仰。这种俯仰运动降低了运输载体100的效率和稳定性。第三,辊接触表面120可能会冲击第一错位的辊210b,从而进一步增加辊210b的磨损,潜在地导致对辊210b或载体100的损坏,并且潜在地导致基板s在载体100上移动或脱落。
44.此外,随着载体100的重心cog的位置在运输方向x上接近第一错位辊210b,即,随着距离a的增加而距离b的减小,由接触辊接触表面120的辊210a提供的反作用载荷ra减小并且由接触辊接触表面120的第一错位的辊210b提供的反应载荷rb增加。特别地,反作用载荷rb增加并且反作用载荷ra减小到当载体100的重心cog在第一错位辊210b上方时(即,距
离b为零时),载体100的支撑重量w为由单个辊支撑。当载体100的重心cog移动经过第一错位辊210b时,载体100则将经受围绕横向轴的另一俯仰运动,直至辊接触表面120接触第二辊运输轨道200b的另一个辊210b。
45.类似的情况在图2b中示出,图2b示出单个辊210a相对于辊运输轨道200a的辊210a错位。单个辊210a与多个辊210a偏移垂直距离d。这种错位导致与上文针对图2a所讨论的模块之间的错位所描述的相同的不利影响。随着载体100沿辊运输轨道200a在运输方向x上运输,由于距离a增加而距离b减小,由错位辊210a提供的反作用载荷rb增加并且由另一辊210a提供的反作用载荷ra减少。当载体100的重心cog在错位辊210a上方时(即,当距离b等于0时),载体100的支撑重量w由错位辊210a承担。此外,载体100以相对于运输方向x的俯仰角α经受围绕横向轴的俯仰运动。当载体100的重心cog移动经过错位辊210a时,载体100则将经受围绕横向轴的另一俯仰运动,直至辊接触表面120接触辊运输轨道200a的另一个辊210a。
46.本公开内容中描述的实施方式提供了对上述问题的解决方案。特别地,本公开内容的实施方式降低了辊运输轨道200a、200b的辊210a、210b承受高载荷的敏感性,减少了辊210a、210b的磨损,并减少了真空处理设备中的颗粒产生。此外,由于对俯仰运动的敏感性降低,本公开内容的实施方式提供了载体100的更稳定和更有效的运输。
47.现在将参照图3a和图3b,图3a和图3b示出了根据本公开内容的实施方式的载体100和辊运输系统。载体100被提供为用于在辊运输轨道上沿运输方向x运输,所述载体包括:第一辊接触表面120a,所述第一辊接触表面用于在辊运输轨道200a、200b上的至少一个第一辊210a、210b上支撑所述载体100,以及第二辊接触表面120b,所述第二辊接触表面用于在辊运输轨道200a、200b的至少一个第二辊210a、210b上支撑所述载体100,其中所述第一辊接触表面120a和所述第二辊接触表面120b在运输方向x上分开,其中两者之间存在空间。
48.图3a和3b示出的两种情况分别与图2a和图2b中示例性示出的情况相同。即,图3a示例性地示出了两个相邻模块错位的情况,使得第一辊运输轨道200a与第二辊运输轨道200b偏移垂直距离d。此外,图3b示例性地示出了辊运输轨道200a的一个辊210a错位的情况,使得错位辊210a与辊运输轨道200a的多个辊210a偏移垂直距离d。
49.根据本公开内容的实施方式,现有技术中的辊接触表面120已经被第一辊接触表面120a和第二辊接触表面120b取代,使得第一辊接触表面120a和第二辊接触表面120b在运输方向x上彼此分隔开。在附图中,第一辊接触表面120a和第二辊接触表面120b被示出为两个单独的部件,但是本公开内容不限于此。例如,第一辊接触表面120a和第二辊接触表面120b可以是同一部件的两个表面,其中该部件在第一辊接触表面120a和第二辊接触表面120b之间形成有凹槽。
50.通过在第一辊接触表面120a和第二辊接触表面120b之间提供空间,载体100始终由辊运输轨道200a、200b的至少两个辊210a、210b支撑。提供在辊接触表面120a、120b之间的空间具有限制载体100的支撑重量w的部分的效果,支撑重量w的该部分由与第一辊接触表面120a和第二辊接触表面120b中的每一个接触的相应的辊210a、210b的每一个所承担。换言之,通过在第一辊接触表面120a和第二辊接触表面120b之间提供空间,距离b不会达到零。
51.此外,通过提供第一辊接触表面120a和第二辊接触表面120b,相应的辊接触表面120a、120b更短并且更不易由于可变的热条件而翘曲。
52.距离a被定义为载体100的重心cog与辊接触表面120a接触辊210a的点之间的距离。类似地,距离b被定义为载体100的重心cog与辊接触表面120b接触辊210b的点之间的距离。由辊210a、210b提供的反作用载荷ra、rb分别与距离a和距离b成比。距离a和b旨在被最大化,使得由与辊接触表面120a、120b接触的辊210a、210b所承担的支撑重量w尽可能接近均匀分布。
53.此外,通过使距离a和b最大化,并且对于给定的垂直距离d,载体100俯仰的俯仰角β被最小化。通过最小化俯仰角β,并通过保持与至少两个辊210a、210b的接触,由第一和第二辊运输轨道200a、200b之间的错位引起的俯仰运动被最小化,从而提高运输载体100的稳定性和效率。
54.通过比较图2a和3a,可以清楚地认识到本公开内容的实施方式所提供的优点。特别地,通过在第一和第二辊接触表面120a,120b之间提供空间,第二辊运输轨道200b的、与第二辊接触表面120b接触的辊210b是不同的。在图2a中,第二辊运输轨道200b的第一个辊210b与辊接触表面120接触,而在图3a中,第一个辊210b位于第一辊接触表面120a和第二辊接触表面120b之间的空间中。相反地,第二辊运输轨道200b的第二个辊210b与第二辊接触表面120b接触。如此一来,载体100的支撑重量w更均匀地分布在与第一及第二辊接触表面120a、120b接触的两个辊210a、210b之间,并且载体100的俯仰角β减小。特别有利地是,当载体100穿过阀300运输并且经过第一和第二辊运输轨道200a、200b之间的错位时,在任何时候都不会由单个辊承受载体100的所有支撑重量w。
55.在单个辊错位的情况下也可以获得类似的优点。图3b参照上面所讨论的图2a中相同的情况,其中单个辊210a错位,使得错位辊210a与多个辊210a偏移垂直距离d。通过在第一辊接触表面120a和第二辊接触表面120b之间提供空间,距离b不会减小到零,并且由错位辊210a承担的载体100的支撑重量w减小。此外,载体100俯仰的俯仰角p也减小。上述针对图3a中两个模块可能错位的情况所讨论的有利效果,在图3b的情况下也能实现。
56.根据可以与本文描述的其他实施方式组合的一些实施方式,第一辊接触表面120a在运输方向x上具有第一长度,并且第二辊接触表面120b在运输方向x上具有第二长度,其中空间的长度等于或大于第一长度的一半或第二长度的一半。
57.所述空间的长度可以等于或大于第一长度的一半和第二长度的一半。具体地,所述空间的长度可以等于或大于载体100的长度的五分之一。更具体地,所述空间的长度、第一长度和第二长度被选择以确保距离a总是大于第一长度的一半,并且距离b总是大于第二长度的一半。
58.如上所述,载体100在运输方向x上的长度可以为1m或更长,特别是2m或更长,更特别是3m或更长,这取决于被处理的基板的尺寸。第一长度和/或第二长度可以长达载体100长度的2/5,特别是长达载体100长度的1/4。第一和/或第二辊接触表面120a、120b在运输方向x上所具有的长度可长达1200mm,特别是可长达600mm,更特别地可长达250mm。
59.根据可以与本文所述的其他实施方式组合的一些实施方式,第一长度和第二长度大于辊运输轨道200a、200b的相邻辊210a、210b之间的长度。术语“相邻辊之间的距离”是指第一辊的中心轴与相邻于第一辊的第二辊的中心轴之间的距离。换言之,第一辊接触表面
120a和第二辊接触表面120b足够长以跨越至少两个相邻辊之间的距离。随着载体100被运输,相应的第一辊接触表面120a和第二辊接触表面120b在与第一个辊210a、210b断开接触之前接触相邻的第二个辊210a、210b。这确保了载体100可以在辊之间运输而不会卡在相邻辊之间。
60.可选地,第一长度和第二长度至少是辊运输轨道200a、200b的相邻辊210a、210b之间的长度的两倍。换言之,第一辊接触表面120a和第二辊接触表面120b足够长以跨越至少三个相邻辊之间的距离。随着载体100被运输,第一辊接触表面120a和第二辊接触表面120b分别被配置为始终接触至少两个相邻辊,从而允许载体100的支撑重量w分布在更多个辊210a、210b之间,减少每个单一辊210a、210b上的载荷。
61.根据可以与本文所述的其他实施方式组合的一些实施方式,第一辊接触表面120a布置在载体100的前端,第二辊接触表面120b布置在载体100的后端,并且空间被布置在载体100的中间。特别地,所述空间被布置在载体100沿运输方向x上的中间。
62.可选地,第一辊接触表面120a可以布置成使得第一辊接触表面120a的第一端部与载体100的前端相距等于或小于100mm,特别地等于或小于50mm,更特别地等于或小于20mm。第一辊接触表面120a的与第一端部相对的第二端部是提供在所述空间处的端部。类似地,第二辊接触表面120b可以布置成使得第二辊接触表面120a第二端部与载体100的后端相距等于或小于100mm,特别是等于或小于50mm,更特别是等于或小于20mm。第二辊接触表面120b的与第二端部相对的第一端部是提供在所述空间处的端部。对于第一辊接触表面120a和第二辊接触表面120b两者而言,当载体100在运输方向x上运输时,相应的第一端部可以称为前端,而相应的第二端部可以被称为后端。
63.根据可以与本文所述的其他实施方式组合的一些实施方式,第一辊接触表面120a和第二辊接触表面120b包括在相应的第一辊接触表面120a和第二辊接触表面120b的前端上的倾斜表面和/或在相应的第一辊接触表面120a和第二辊接触表面120b的后端上的倾斜表面。换言之,第一辊接触表面120a和第二辊接触表面120b可以在各自的前端、各自的后端、或各自的前端和后端都设有倒角。倾斜表面在垂直方向y上的尺寸可以为至少0.5mm,特别是至少1mm,更特别是至少2mm。倾斜表面在运输方向x上的尺寸可以为至少20mm,更特别地至少为50mm。通过在第一辊接触表面120a和第二辊接触表面120b的相应前端和/或后端提供倾斜表面,在进入时与辊210a、210b建立的接触可以变得平滑,而在退出时接触的断开可以变得平滑。这样的倾斜表面允许载体100更平滑地在错位辊210a、210b上运输,减少了对错位辊210a、210b的冲击载荷,并且减少了对载体100或基板s的冲击损伤的变化。
64.根据本公开内容的实施方式,通过增加第一辊接触表面120a和第二辊接触表面120b的顺应性(compliance),载体100的支撑重量w可以被更均匀地分布,使得当遇到错位辊时,更多辊210a、210b与第一辊接触表面120a和第二辊接触表面120b接触。
65.根据可以与本文所述的其他实施方式组合的一些实施方式,第一和第二辊表面可以利用柔性装置124附接至载体100,如图4a示例性所示。应注意,图4a仅示出了第一辊接触表面120a的详细视图,然而相同的布置可以同样适用于第二辊接触表面120b。
66.可以提供柔性装置124,使得第一辊接触表面120a和第二辊接触表面120b可以在垂直方向y上偏转,从而为每个接触表面提供足够的顺应性以接触多于一个的辊210a、210b。例如,第一辊接触表面120a和第二辊接触表面120b可以利用弹簧、橡胶衬套或柔性构
件附接至载体100,使得当遇到错位的辊时,至少两个辊210a、210b与第一辊接触表面120a和第二辊接触表面120b接触。通过允许至少两个辊210a、210b接触,载体100的支撑重量w分布在多个辊上,甚至进一步降低了辊载荷。
67.柔性装置124具有为载体100的运输提供悬挂效果的额外的有利效果。柔性装置124可以通过吸收冲击和振动来提供载体100的更平稳、更有效的运输。柔性装置124可以通过进一步增加一个阻尼设备来强化,以更好地控制冲击和振动。
68.根据可以与本文描述的其他实施方式组合的一些实施方式,第一辊接触表面120a和第二辊接触表面120b可以通过枢轴125附接至载体100,使得第一辊接触表面120a和第二辊接触表面120b能够围绕横向方向z的轴旋转,如图4b中示例性所示。应当注意,图4b仅示出了第一辊接触表面120a的详细视图,然而相同的布置可以同样适用于第二辊接触表面120b。
69.枢轴125允许第一辊接触表面120a和第二辊接触表面120b旋转,使得多于一个的辊210a、210b可以接触第一和/或第二辊接触表面120a、120b。枢轴125示例性地示出为分别大致位于沿第一辊接触表面120a和第二辊接触表面120b的长度的中点处,然而本公开内容不限于此,并且枢轴125可以位于第一辊接触表面120a和第二辊接触表面120b的前端或后端。通过每个相应的第一辊接触表面120a和第二辊接触表面120b接触至少两个辊210a、210b,每个相应的第一和第二辊接触表面可以在多个辊210a、210b之间分配载体100的支撑重量w,甚至进一步降低辊载荷。
70.枢轴125可以用于提供第一辊接触表面120a和第二辊接触表面120b的有限旋转角度。例如,可以提供缓冲块(bump stop)以限制第一辊接触表面120a和第二辊接触表面120b的旋转,使得即使在仅接触一个辊的情况下,第一辊接触表面120a和第二辊接触表面120b仍然能够支撑载体100的支撑重量w。由于与错位辊210a、210b的垂直距离d相比而言载体100的尺寸较大,因此旋转角度可以很小。枢轴125可以用于将第一辊接触表面120a和第二辊接触表面120b的旋转角度限制为至多3度,特别是至多1度,更特别地至多0.5度。
71.此外,图4a和4b中所示的两个实施方式可以组合,其中第一辊接触表面120a和第二辊接触表面120b利用枢轴125附接至载体100,并且进一步设置有柔性装置124。例如,第一辊接触表面120a和第二辊接触表面120b可以在每个相应的第一辊接触表面120a和第二辊接触表面120b的后端处利用枢轴125附接至载体100,而柔性装置124可以设置在每个相应的第一辊接触表面120a和第二辊接触表面120b的前端处。
72.现在参见图5,图5示出了根据本文所描述的实施方式的用于真空处理设备的辊运输系统和载体100的横截面前视图。辊运输系统设置有根据本文所描述的实施方式的辊运输轨道200,以及用于由辊运输系统沿运输方向x运输的载体100。根据可以与本文所描述的其他实施方式组合的一些实施方式,辊运输轨道200可以设置在载体100的底部,并且载体100可以被取向在垂直或接近垂直的取向。
73.如上述实施方式中所述,载体100设置有第一辊接触表面120a和第二辊接触表面120b,所述第一辊接触表面120a和第二辊接触表面120b用于连接辊运输轨道200的多个辊210。根据可与本文所描述的其他实施方式组合的一些实施方式,第一辊接触表面120a和第二辊接触表面120b可以是用于接触圆柱形辊的平坦接触表面。圆柱形辊具有低摩擦度、低磨损和低成本的特性。然而,可以实施用于在横向方向z上引导载体100的额外装置。
74.替代地,第一辊接触表面120a和第二辊接触表面120b可以是用于接触凹面辊的凸接触表面。例如,第一辊接触表面120a和第二辊接触表面120b可以是具有圆形横截面的杆,其中弧形接触表面用于接触形状相似的凹面辊。这种辊的布置除了在垂直方向y上支撑载体100之外,还允许在横向方向z上引导载体100,然而,与圆柱形辊的平坦接触表面相比,这种辊可能具有更高的摩擦度和更高的磨损的特性。替代地,第一辊接触表面120a和第二辊接触表面120b可以是用于接触v形槽辊的v形接触表面。
75.根据可以与本文所描述的其他实施方式组合的一些实施方式,辊运输系统还可以包括设置在载体100的顶部的上导轨400,所述上导轨400用于将载体100保持在垂直或接近垂直的取向。根据进一步的实施方式,图5中示例性地示出的上导轨400包括至少一个磁性引导元件410,载体100可以进一步包括至少一个磁性引导元件130。磁性引导元件410的极性与磁性导引元件130的极性相反设置,使得磁吸力在横向方向z上非接触地引导载体100。载体100的非接触磁性引导在真空处理设备中是有利的,因为避免了颗粒的产生。
76.替代地,上导轨400可以包括多个辊,所述多个辊被配置为在横向方向z上引导载体100。多个辊可以被布置成围绕平行于垂直方向y的轴旋转并且与至少一个载体100的侧面接触。多个辊可以布置在载体100的一侧或载体100的两侧。
77.辊运输系统可以进一步包括布置在载体100底部的下导轨600。类似于上导轨400,下导轨600可以被配置为在横向方向z上引导载体100,尤其是在多个辊210是圆柱形辊的情况下。下导轨600可以包括至少一个磁性引导元件610,并且载体100可以进一步包括至少一个磁性导引元件140。磁性引导元件610的极性与磁性导引元件140的极性相反设置,使得磁吸力在横向方向z上非接触地引导载体100。
78.由于施加到载体100的磁吸力,上导轨400和/或下导轨600可以进一步被配置为支撑载体100的至少一部分重量。虽然上导轨400和下导轨600的主要功能是在横向方向z上提供引导,但磁力可以用来抵消载体100的部分重量,使得由辊运输轨道200承担的载体100的支撑重量w可以进一步减少,使得进一步降低辊的载荷和辊的磨损。
79.辊运输系统可以进一步包括驱动装置500。如图5示例性所示,驱动装置500可以包括具有至少一个电线圈510的线性马达,并且载体100可以包括至少一个磁驱动元件150。至少一个电线圈510用于在磁驱动元件150中感生出磁力,使得载体100在运输方向x上沿辊运输系统被驱动。图5示例性示出的实施方式具有驱动装置500,所述驱动装置500布置在载体100的底部。然而,驱动装置500可以替代地布置在载体100的顶部。与上导轨400和下导轨600的磁性非接触式引导设备类似,非接触式磁性驱动设备500在真空处理设备中是有利的,因为避免了颗粒的产生。
80.替代地,辊运输系统可以包括多个从动辊,所述从动辊被配置为通过接触载体100的表面来沿着辊运输系统旋转并驱动载体100。例如,多个辊210中的一些可以是从动辊。
81.根据一些实施方式,提供了一种用于在真空处理腔室内运输载体100的载体运输系统。载体运输系统包括在运输方向x上延伸的轨道组件和辊运输轨道200。所述轨道组件包括设置在第一纵坐标处并沿运输方向x延伸的第一被动磁性单元、设置在第二纵坐标处并沿运输方向x延伸的第二被动磁性单元,其中第一被动磁性单元和第二被动磁性单元用于抵消载体的重量。所述辊运输轨道200设置在第三纵坐标处并且包括多个辊210,所述多个辊210被配置为支撑载体100的部分重量,其中第一纵坐标与第二纵坐标之间的第一垂直
距离大于第二纵坐标与第三纵坐标之间的第二距离。根据一些实施方式,本公开内容的其他特征、细节、实施方式和实现方式可以与辊运输系统的上述实施方式结合。
82.另外地或替代地,根据一些实施方式,提供了一种用于基板s的载体100,基板s将在用于对基板s进行真空处理的设备中处理。载体100包括设置在第一载体纵坐标处的第一被动磁性单元、设置在第二载体纵坐标处的第二被动磁性单元、以及设置在第三载体纵坐标的第三被动磁性单元,其中第一载体纵坐标与第二载体纵坐标之间的第一垂直载体距离大于第二载体纵坐标与第三载体纵坐标之间的第二载体距离。根据一些实施方式,本公开内容的其他特征、细节、实施方式和实现方式可以与载体100的上述实施方式结合。
83.在处理基板s期间,可以对载体100进行加热。因此,载体经历热膨胀。特别是对于被垂直取向或接近垂直取向的基板,其中基板可具有1m或以上或甚至多达数米的垂直延伸,即,大面积基板,因此热膨胀可能是显著的。因此,若第二被动磁性单元(即在载体100顶部的第一被动磁性单元下方的被动磁性单元)抵消载体100的大部分重量,则是有益的。第二被动磁性单元位置处的热膨胀量小于第一被动磁性单元附近的热膨胀量。因此,第二被动磁性单元位置处,被动磁性单元的支撑力受热膨胀影响较小。
84.根据本公开内容的一个方面,提供了一种用于将材料沉积到基板上的真空处理设备。真空处理设备包括至少一个真空处理腔室和如本文所述实施方式的辊运输系统,所述辊运输系统用于运输如本文实施方式所述的载体。辊运输系统被配置为运输载体进出至少一个真空处理腔室。
85.真空处理设备可以进一步包括处理装置。特别地,处理装置通常布置在至少一个真空处理腔室中,并且处理装置可以从由沉积源、蒸发源和溅射源组成的群组中选择。
86.术语“真空”可被理解为具有小于例如10毫巴的真空压力的技术真空。一般地,如本文所描述的至少一个真空处理腔室中的压力可在10-5
毫巴与约10-8
毫巴之间,更一般地在10-5
毫巴与10-7
毫巴之间,并且甚至更一般地在约10-6
毫巴与约10-7
毫巴之间。至少一个真空处理腔室中的压力可认为是至少一个真空处理腔室内的蒸发材料的分压或总压(当仅存在蒸发材料作为要在至少一个真空处理腔室中被沉积的组分时,两者可近似相同)。至少一个真空处理腔室中的总压可在约10-4
毫巴至约10-7
毫巴的范围内,尤其是在至少一个真空处理腔室中存在除蒸发材料之外的第二组分(诸如处理气体等)的情况。因此,至少一个真空处理腔室可以是“真空沉积腔室”,即,用于真空沉积的真空处理腔室。
87.为了将载体100运输进出至少一个真空处理腔室,真空处理设备可以进一步包括至少一个阀300。阀300可以包括诸如可密封的滑动门,被配置为将一个真空处理腔室内部的环境与相邻的真空处理腔室的环境隔离。阀300可以包括在装载锁定腔室中,该装载锁定腔室被配置成将载体100和/或基板s从与至少一个真空处理腔室中的环境不同的大气环境装载至真空处理设备中。
88.真空处理腔室可以包括至少一个根据本文所描述的实施方式的辊运输系统。至少一个辊运输系统可以用于在两个方向上操作,即,在前进运输方向和后退运输方向两者上的载体100的双向运输。替代地,可以提供第二辊运输系统,其中第一辊运输系统用于在一个方向上操作,另一个辊运输系统用于在另一方向上操作。
89.虽然前述内容针对的是本公开内容的实施方式,但是在不脱离本公开内容的基本范围的情况下,可设想本公开内容的其他和进一步实施方式,并且本公开内容的范围由所
附权利要求书的范围确定。
90.特别地,本书面说明书使用示例来公开本公开内容,包括最佳模式,并且还使本领域技术人员能够实践所描述的主题,包括制造和使用任何装置或系统以及执行任何并入的方法。尽管上文已经公开了各种具体实施方式,但上述实施方式的相互非排他性的特征可以相互组合。可专利的范围由权利要求限定,若其他示例中的结构要素与权利要求书的字面语言没有差别,或者若其他示例中包括与权利要求书的字面语言没有实质性差别的等效结构要素,那么这些其他示例也在权利要求书的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1