杠杆驱动的晶圆定位及托起机构
1.本发明属于晶圆制造技术领域,具体涉及一种杠杆驱动的晶圆定位及托起机构。
背景技术:
2.晶圆的制造过程一般包括脱氧提纯、制造晶棒、晶片分片、wafer抛光、wafer镀膜、上光刻胶、光刻、离子注射、抛光、晶圆切片和测试等工艺流程,在晶圆抛光的过程中,需要将晶圆从预备工位移动至磨削台工位进行打磨,晶圆需要位置精准的固定在磨削台上,以利于进行后续的磨削工作进行,在晶圆移动工位的过程中,需利用夹取工具,为了使晶圆精确的位于夹取工具的中心位置,首先需要对晶圆进行定心,由于晶圆本身的尺寸存在误差,且放置在预备工位上时还存在放置误差,导致晶圆不能高精度的与夹取工具的中心重合,另外,有晶圆原料的物料特性,晶圆本身较脆易碎,夹取工具作用在晶圆上的力不易控制,会导致晶圆转移过程中发生损伤,成品率降低。
技术实现要素:
3.发明目的:针对现有技术存在的不足,本发明的目的是提供一种高精度定心,可缓冲夹紧力的杠杆驱动的晶圆定位及托起机构。
4.技术方案:为了解决上述技术问题,本发明采用的技术方案如下:
5.一种杠杆驱动的晶圆定位及托起机构,包括设置在底板上的定位装置和托起装置,所述定位装置实现晶圆定心,包括驱动装置、中心板、缓冲装置、以及沿中心板周向均匀设置的至少三组撬杆和浮动定位指,所述驱动装置与中心板单侧浮动连接,所述缓冲装置为设置在底板与中心板之间的弹簧;所述撬杆内端与中心板连接,外端铰接在底板上并连接有浮动定位指;
6.所述驱动装置下压中心板并使弹簧压缩,自由状态时,所述弹簧释放蓄能推动中心板上移,三个撬杆被同时抬起,三个浮动定位指同时向中心靠拢作定心夹紧,实现晶圆同步向心,然后通过气缸带动托举爪,托举爪收紧后对晶圆进行托举。
7.进一步地,所述撬杆外端和浮动定位指固定在旋转轴组件上,旋转轴组件固定设置在底板上。
8.进一步地,所述旋转轴组件包括滚珠衬套组件、滚珠衬套支架、轴承座和轴承座压板;所述滚珠衬套组件的芯轴两端通过轴承座固定在底板上,轴承座压板设置在轴承座上,滚珠衬套组件的滚珠衬套外环固定有滚珠衬套支架;所述滚珠衬套支架至少设置两个平面,撬杆的外端和浮动定位指分别固定在滚珠衬套支架的平面结构上。
9.进一步地,所述滚珠衬套支架与一侧轴承座压板之间连接有蝶形弹簧。
10.进一步地,所述撬杆与中心板之间设有微调结构,微调结构包括精密微调螺钉和位置调整顶板;精密微调螺钉与撬杆螺纹连接,位置调整顶板固定在中心板上;精密微调螺钉的底部与位置调整顶板接触,调整位置调整顶板的位置。
11.进一步地,所述驱动装置为滚珠丝杆推拉电机,滚珠丝杆推拉电机包括步进电机、
滚珠丝杆和螺母;滚珠丝杆与螺母配合,滚珠丝杆与中心板单侧浮动连接。
12.进一步地,在所述底板的中心位置通过导轨架固定有上层中心板,驱动装置设置在上层中心板上;中心板和导轨架之间通过直线导轨连接,实现上下滑动。
13.进一步地,所述浮动定位指包括定位指座、芯轴和定位柱;在定位指座的两端内对向设置有两个滚珠衬套,芯轴活动设置在定位指座内的滚珠衬套内,可进行轴向滑动,在定位指座中部空缺部分设置有复位弹簧,复位弹簧套接在芯轴外周,定位柱设置在芯轴底端,在定位柱上设置有凸台。
14.进一步地,所述托起装置包括气缸和托举爪,托举爪通过滑台滑动设置在气缸上,托起装置数量为3个,分别设置浮动定位指一侧的底板上。
15.进一步地,在每个气缸后侧设置有第一接近开关,三个第一接近开关串联,确保三个气缸各自运动到位。
16.有益效果:与现有技术相比,本发明具有以下优点:
17.(1)本发明的定位装置由滚珠丝杆推拉电机、中心板和撬杆形成一个杠杆组合,通过弹簧回弹推动中心板的上移,使得三个撬杆和浮动定位指向同时被抬起向中心靠拢作径向定心夹紧;实现晶圆同步定心,本发明利用设置在底板与中心板之间的多个弹簧构成缓冲装置,实现电机与撬杆之间传动时的缓冲,避免浮动定位指向内收紧时因传动刚度过大而导致晶圆破裂。
18.(2)本发明撬杆和浮动定位指固定在旋转轴组件上,旋转轴组件固定在底板上,采用旋转轴组件的位置稳定、精度高,保证撬杆和浮动定位指运动精度。
19.(3)驱动装置为滚珠丝杆推拉电机,采用滚珠丝杆推拉电机,其结构简单、精度易于保证。
20.(4)本发明采用微调结构调节位撬杆的高度和位置,弥补部件加工中产生的误差,微调结构只需在出厂前进行使用,或者在更换零件时使用,进行撬杆的校准,在使用过程中无需进行校准,使用方便,且保证使用过程中精度恒定不变。精密微调螺钉与铜制螺母配合,耐磨性好,并且还具有锁紧功能,防松动。
21.(5)本发明采用浮动定位指,导柱可滑动,且利用复位弹簧进行复位,通过浮动定位指的伸缩,可以使晶圆下降时尽可能的接近放置平台,防止晶圆放置产生偏差或损伤。
附图说明
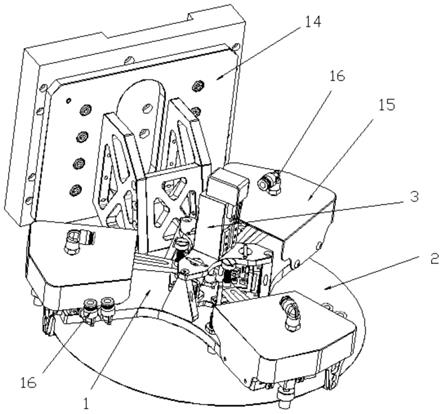
22.图1是杠杆驱动的晶圆定位及托起机构整体结构示意图;
23.图2是杠杆驱动的晶圆定位及托起机构部分结构示意图;
24.图3是杠杆驱动的晶圆定位及托起机构部分结构示意图
25.图4是旋转轴组件的结构示意图;
26.图5是浮动定位指的结构示意图;
27.图6是浮动定位指的剖面图。
具体实施方式
28.下面结合具体实施例,进一步阐明本发明,实施例在以本发明技术方案为前提下进行实施,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围。
29.如图1-6所示,一种杠杆驱动的晶圆定位及托起机构,包括定位装置和托起装置,定位装置和托起装置均安装在底板1上,定位装置实现晶圆2的精准定位,托起装置实现晶圆2夹起和放下。
30.定位装置包括驱动装置3、中心板4、缓冲装置,以及至少三组撬杆5和浮动定位指6,缓冲装置为设置在底板1与中心板4之间的多个弹簧17;驱动装置3与中心板4单侧浮动连接,驱动装置3用于推动中心板4下降;中心板4周向均匀设置至少三个撬杆5;撬杆5内端与中心板4连接,撬杆5外端通过旋转轴组件7铰接在底板1上,同时浮动定位指6与旋转轴组件7连接。定位装置的动作原理:驱动装置3向下推动中心板4时,此时弹簧17被压缩,当驱动装置3回旋时,被压缩的弹簧17回弹产生向上的推力,推动中心板4上移,三个撬杆5的内端被同时抬起,设置在撬杆5外端的三个浮动定位指6同时向中心靠拢作定心夹紧;实现晶圆2同步向心定位。夹紧力矩由中心板4下部的弹簧17提供。
31.如图2和4所示,撬杆5末端通过一个旋转轴组件与底板和浮动定位指6连接,撬杆5和浮动定位指6固定在旋转轴组件7上,旋转轴组件7固定在底板1上。具体的,旋转轴组件7包括滚珠衬套组件71、滚珠衬套支架72、轴承座73、轴承座压板74。滚珠衬套组件71的芯轴两端通过轴承座73固定在底板1上,轴承座压板74设置在轴承座73上,滚珠衬套组件71的外周固定有滚珠衬套支架72,滚珠衬套支架72与一侧轴承座压板74之间连接有蝶形弹簧75,滚珠衬套支架72至少设置两个平面,撬杆5的外端和浮动定位指6分别固定在滚珠衬套支架72的平面结构上。
32.因为滚珠衬套支架72和轴承座73之间是间隙配合,为了保证工作时滚珠衬套支架72的位置稳定,滚珠衬套支架72与一侧轴承座压板74之间连接有蝶形弹簧75,通过蝶形弹簧75将滚珠衬套支架72压紧在轴承座73的一面上可以提供单侧压紧,从而保证其位置稳定。
33.滚珠衬套组件71为现有的标准零部件。其包括芯轴、滚珠衬套和滚珠衬套外环。滚珠衬套套装在芯轴上,滚珠衬套外环套装在滚珠衬套上。
34.如图5所示是浮动定位指的结构示意图,浮动定位指6对晶圆2进行夹紧定位,包括定位指座61、芯轴62和定位柱63,在定位指座61的两端内部对向设置有两个滚珠衬套组件64,滚珠衬套组件64包括滚珠衬套和滚珠衬套外圈,两个滚珠衬套组件64共用一根芯轴62,芯轴62活动设置在定位指座61内的滚珠衬套组件64内,可进行轴向滑动,在定位指座61中部空缺部分设置有复位弹簧65,复位弹簧65套接在芯轴62外周,定位柱63设置在芯轴62底端,在定位柱63上设置有凸台66,通过凸台66与磨削台接触。定位柱63由塑料制成,在进行定位时,直接与晶圆2接触。
35.驱动装置3为滚珠丝杆推拉电机,滚珠丝杆推拉电机包括步进电机31、滚珠丝杆32和螺母33;滚珠丝杆32与螺母33配合,滚珠丝杆32与中心板4单侧浮动连接(即滚珠丝杠32下端与中心板4之间不固定,滚珠丝杠32可在步进电机32驱动下,将中心板4下压,而不能将其抬起)。采用滚珠丝杆推拉电机,结构简单、精度易于保证。滚珠丝杆推拉电机中,由电机带动其内部的螺母旋转,螺母不能沿轴向移动,故丝杆会沿轴向移动,最终滚珠丝杆推动中心板4向下运动,中心板4的上移由弹簧17复位释放的弹力完成。
36.如图3所示,本实施例中驱动装置3的安装方式为:在底板1的中心位置通过导轨架9固定有上层中心板8,驱动装置3设置在上层中心板8上。中心板4和导轨架9之间通过直线
导轨连接,实现上下滑动。
37.撬杆5与中心板4之间设有微调结构,微调结构包括精密微调螺钉10和位置调整顶板11;精密微调螺钉10与撬杆5螺纹连接,位置调整顶板11固定在中心板4上;精密微调螺钉10的底部与位置调整顶板11单侧浮动连接,拧动精密微调螺钉10,可调节撬杆5相对于位置调整顶板11的位置,从而调整撬杆5的高度。精密微调螺钉10采用hgms系列细牙螺纹副,用不锈钢材料精研制成,选用m6x0.25超细螺纹(螺杆旋转一周,轴向位移仅0.25mm),灵敏度达0.001mm,在不需要定量调整时,相比普通千分头,成本低,重量轻,调整更灵活。在撬杆5的上部的精密微调螺钉10上配合有黄铜或青铜制螺母12,耐磨性好,并且还具有锁紧功能,防松动。
38.定位后,可启动托起装置,托起装置设置有3个,本实施例中,托起装置设置在旋转轴组件7一侧的底板1上。托起装置包括气缸21和托举爪20,托举爪20通过滑台滑动设置在气缸21上,托起装置数量为3个,分别设置浮动定位指6一侧的底板1上,形成三点托起晶圆。在气缸21的后端设有顶丝座22和微调螺丝二23,微调螺丝二23与顶丝座22螺纹连接,顶端与气缸21接触,用于调整气缸21的位置。在每个气缸21后侧设置有接近开关24,三个接近开关24串联,保证三个气缸21运动到位,防止气缸21出现运动异常。在底板1上还设置有检测晶圆是否到位的第二接近开关13。
39.如图1所示,其中底板1通过连接架14与外部机构连接。所有运动部件均处于由pc聚碳酸酯或不锈钢材料制成的防护罩15内,运动部件包括托起装置和定位装置的可运动部件,防护罩15上方安装有真空吸尘管路16,将由运动部件磨损或脱落的粉尘颗粒吸走,防止污染晶圆。
40.夹起晶圆的流程:整个装置在机械臂的带动下下移,驱动装置将中心板4下压,此时弹簧17被压缩,三个浮动定位指6在撬杆5重力作用下打开,晶圆进入内部后,驱动装置3回旋,弹簧17释放蓄能复位,推动中心板4上移,三个撬杆5内端同时抬起,使末端的三个浮动定位指6被向中心靠拢实现晶圆2同步向心定位。气缸21驱动托举爪20收紧,拿起晶圆2。
41.放下晶圆2流程:气缸21驱动托举爪20下移,浮动定位指6的凸台66端面接触磨削台,继续下移一定距离,晶圆2接近磨削台,气缸21断气,托举爪20松开,晶圆2沿浮动定位指6的定位柱63下滑至磨削台,磨削台真空开启,滚珠丝杆推拉电机3旋转,滚珠丝杠32推动中心板4下移,浮动定位指6松开。
42.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1