一种基于磁场耦合的双向协同振动抛光装置及方法
1.本发明涉及复杂曲面抛光技术,特别提供了一种基于磁场耦合的双向协同振动抛光装置及方法。
背景技术:
2.随着航空航天、轨道交通、精密机械、生物医疗等高新技术产业的飞速发展,对诸多具有复杂结构的零部件/构件的超精密加工技术提出了更严格的要求。抛光作为零部件/构件加工的最终程序,是获得高精度与高质量表面的关键手段。目前,磁场辅助抛光技术作为一种应用最为广泛的超精密技术,具有游离磨料的适应性强、可控制等优势,广泛应用于复杂结构的零部件/构件的超精密抛光。其技术主要有磁力研磨、磁流变抛光、磁流体抛光以及磁射流抛光等等,但是磁场辅助抛光依赖于磁场发生装置与抛光介质,且自度化程度偏低。磁场发生装置多采用永磁材料,由于其具有较高的宽磁滞回线、高矫顽力、高剩磁、制造成本低、使用方便等优势,但是永磁材料磁感应强度难以调节,在一定程度上限制了磁场辅助抛光区域内磁场强度的调整。然而对于介质来说,磁力研磨抛光介质流动性差;磁流变液在在高剪切的加工条件下性能稳定性差,难以保证内表面抛光的质量。因此,开发面向零部件/构件高效高质的磁场辅助抛光装置,存在重要的理论意义和实际应用价值。本发明提出一种基于磁场耦合的双向协同振动抛光装置及方法,通过电磁与永磁结合的磁场发生装置,利用高性能磁性剪切增稠介质,结合工业机器人的6自由度柔性调整,引入超声轴向高频振动与电磁横向低频振动,实现耦合磁场中对复杂结构的零部件/构件的轴向高频与横向低频的协同振动抛光。
技术实现要素:
3.本发明提供了一种基于磁场耦合的双向协同振动抛光装置及方法。通过电磁与永磁结合的磁场发生装置,利用高性能磁性剪切增稠介质,结合工业机器人的6自由度柔性调整,引入超声轴向高频振动与电磁横向低频振动,实现耦合磁场中对复杂结构的零部件/构件的轴向高频与横向低频的协同振动抛光。
4.本发明提供的一种基于磁场耦合的双向协同振动抛光装置及方法:所述装置包括工业机器人、电主轴、超声振动装置、磁场发生装置、夹具、低频振动装置,精密位移平台,所述超声振动装置与电主轴进行连接并固定于工业机器人的末端执行器上,所述磁场发生装置固定于超声振动装置的下端,所述夹具安装在低频振动装置上,所述低频振动装置安装在精密位移平台上,所述磁场发生装置包括螺母1、端盖、弹簧1、电磁线圈1、散热器、密封圈、螺栓1、永磁装置,所述永磁装置包括磁芯、螺栓2、固定件、螺母2、球形磁极和磁极套,所述电磁线圈1放置于散热器内部,并通入2/3的冷却液体,所述密封圈安装在散热器下部,所述散热器通过螺母1和螺栓1与端盖连接,所述以圆周均布排列的4个球形磁极安装在磁芯上,并通过固定件、螺栓2和螺母2的配合将4个球形磁极紧固在磁芯上,所述磁极套以间隙配合的方式固定于球形磁极上,所述缠绕有电磁线圈1的磁芯通过弹簧1连接在端盖下端,
所述磁性剪切增稠介质吸附在磁极套外部,所述低频振动装置包括弹簧座、弹簧2、振动平台、振动基座、铁芯、电磁线圈2、电磁座和永磁铁,所述振动平台通过弹簧2与弹簧座相连,并安装在振动基座上,所述永磁铁安装在振动平台左侧,所述电磁线圈2缠绕在铁芯外部并安装在电磁座上,所述电磁线圈2通入周期性交流电。
5.本发明的有益效果是:1、本发明所述的一种基于磁场耦合的双向协同振动抛光装置及方法,磁场发生装置安装在工业机器人末端执行器上,可实现磁场发生装置的6自由度移动,能够完成针对不同形状、不同尺寸的复杂结构的零部件/构件的抛光,具有操作柔性。2、本发明所述的一种基于磁场耦合的双向协同振动抛光装置及方法,以磁性剪切增稠介质作为抛光介质,在剪切力和磁场力的作用下磁性剪切增稠介质形成具有剪切增稠效应的柔性增强复合粒子簇。3、本发明所述的一种基于磁场耦合的双向协同振动抛光装置及方法,永磁装置由4个可拆卸的球形磁极构成,若球形磁极失效,可方便对球形磁极进行拆卸与再次充磁,从而降低永磁装置的更换成本。4、本发明所述的一种基于磁场耦合的双向协同振动抛光装置及方法,4个球形磁极可根据不同的极性具有16种圆周均布排列方式,电磁线圈的极性可通过调整通入电流的方向进行2种改变;可在抛光区域内产生32种类型的耦合磁场,从而根据不同的待加工工件的材料特性,进行针对性的耦合磁场。5、本发明所述的一种基于磁场耦合的双向协同振动抛光装置及方法,电磁线圈产生的磁场强度可通过改变通入的电流信号进行调整,改变了抛光区域内磁力线的分布,加剧了抛光区域内磁场梯度的变化,增大了抛光作用力。6、本发明所述的一种基于磁场耦合的双向协同振动抛光装置及方法,超声振动装置对磁场发生装置提供轴向高频振动,低频振动装置实现待加工工件的横向低频振动,从而实现耦合磁场中的轴向高频与横向低频的协同振动抛光,提高抛光效率与质量。
附图说明
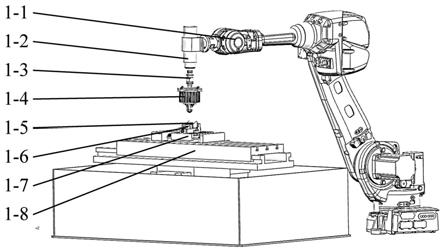
6.图1是本发明的一种基于磁场耦合的双向协同振动抛光装置及方法的整体结构示意图。
7.图2是本发明的一种基于磁场耦合的双向协同振动抛光装置及方法的磁场发生装置结构示意图。
8.图3是本发明的一种基于磁场耦合的双向协同振动抛光装置及方法的永磁装置结构示意图。
9.图4是本发明的一种基于磁场耦合的双向协同振动抛光装置及方法的低频振动装置结构示意图。
10.图5是本发明的一种基于磁场耦合的双向协同振动抛光装置及方法的磁性剪切增稠原理示意图。
11.图6是本发明的一种基于磁场耦合的双向协同振动抛光装置及方法的不同耦合磁场磁力线分布示意图。
具体实施方式
12.具体实施方式一:结合图1、图2、图3和图4本实施方式所述装置包括工业机器人(1
‑
1)、电主轴(1
‑
2)、超声振动装置(1
‑
3)、磁场发生装置(1
‑
4)、夹具(1
‑
6)、低频振动装置
(1
‑
7),精密位移平台(1
‑
8),所述磁场发生装置(1
‑
4)包括螺母1(2
‑
1)、端盖(2
‑
2)、弹簧1(2
‑
3)、电磁线圈1(2
‑
4)、散热器(2
‑
5)、密封圈(2
‑
6)、螺栓1(2
‑
7)、永磁装置(2
‑
8),所述永磁装置(2
‑
8)包括磁芯(3
‑
1)、螺栓2(3
‑
2)、固定件(3
‑
3)、螺母2(3
‑
4)、球形磁极(3
‑
5)和磁极套(3
‑
6),所述低频振动装置(1
‑
7)包括弹簧座(4
‑
1)、弹簧2(4
‑
2)、振动平台(4
‑
3)、振动基座(4
‑
4)、铁芯(4
‑
5)、电磁线圈2(4
‑
6)、电磁座(4
‑
7)和永磁铁(4
‑
8),所述电磁线圈1(2
‑
4)放置于散热器(2
‑
5)内部,并通入2/3的冷却液体,所述密封圈(2
‑
6)安装在散热器(2
‑
5)下部,所述散热器(2
‑
5)通过螺母1(2
‑
1)和螺栓1(2
‑
7)与端盖(2
‑
2)连接,所述以圆周均布排列的4个球形磁极(3
‑
5)安装在磁芯(3
‑
1)上,通过固定件(3
‑
3)、螺栓2(3
‑
2)和螺母2(3
‑
4)的配合将4个球形磁极(3
‑
5)紧固在磁芯(3
‑
1)上,所述磁极套(3
‑
6)安放于球形磁极(3
‑
5)上,并以间隙配合的方式进行固定,所述缠绕有电磁线圈1(2
‑
4)的磁芯(3
‑
2)通过弹簧1(2
‑
3)连接在端盖(2
‑
2)下端,所述磁性剪切增稠介质(2
‑
9)吸附在磁极套(3
‑
6)外部,所述磁场发生装置(1
‑
4)固定于超声振动装置(1
‑
3)的下端,所述超声振动装置(1
‑
3)与电主轴(1
‑
2)进行连接并固定于工业机器人(1
‑
1)的末端执行器上,所述振动平台(4
‑
3)安装在振动基座(4
‑
4)上,并通过弹簧2(4
‑
2)与弹簧座(4
‑
1)相连,所述永磁铁(4
‑
8)安装在振动平台(4
‑
3)左侧,所述电磁线圈2(4
‑
6)缠绕在铁芯(4
‑
5)外部并安装在电磁座(4
‑
7)上,所述低频振动装置(1
‑
7)安装在精密位移平台(1
‑
8)上,所述夹具(1
‑
6)安装在低频振动装置(1
‑
7)上。
13.具体实施方式二:结合图1说明本实施方式所述的一种基于磁场耦合的双向协同振动抛光装置及方法,其特征在于:所述工业机器人(1
‑
1)具有6个自由度,可实现磁场发生装置(1
‑
4)的6自由度控制,工业机器人(1
‑
1)可选用abb irb4600机器人,其他与具体实施方式一相同。
14.具体实施方式三:结合图1、图2和图3说明本实施方式所述的一种基于磁场耦合的双向协同振动抛光装置及方法,其特征在于:球形磁极(3
‑
5)集成于磁芯(3
‑
1)上构成永磁装置(2
‑
8),通过固定件(3
‑
3)与螺栓2(3
‑
2)、螺母2(3
‑
4)组成的可拆卸结构,可方便对球形磁极(3
‑
5)的拆卸与再次充磁,从而降低永磁装置(2
‑
8)的更换成本,其他与具体实施方式一或二相同。
15.具体实施方式四:结合图1、图2和图3说明本实施方式所述的一种基于磁场耦合的双向协同振动抛光装置及方法,其特征在于:4个球形磁极(3
‑
5)可根据不同的极性具有16种圆周均布排列方式,改变通入电流的方向可以使电磁线圈1(2
‑
4)具有2种不同的极性,通过永磁装置(2
‑
8)与电磁线圈1(2
‑
4)生成磁场的耦合,可在抛光区域内产生32种类型的耦合磁场,从而根据不同的待加工工件(1
‑
5)的材料特性,选择针对性的耦合磁场,其他与具体实施方式一、二或三相同。
16.具体实施方式五:结合图1和图2说明本实施方式所述的一种基于磁场耦合的双向协同振动抛光装置及方法,其特征在于:所述磁场发生装置(1
‑
4)的电磁线圈1(2
‑
4)产生的磁场强度可通过改变通入的电流信号进行调控,改变了抛光区域内磁力线的分布,加剧了抛光区域内磁场梯度的变化,增大了抛光作用力,其他与具体实施方式一、二、三或四相同。
17.具体实施方式六:结合图1和图4说明本实施方式所述的一种基于磁场耦合的双向协同振动抛光装置及方法,超声振动装置(1
‑
3)接受信号后可使磁场发生装置(1
‑
4)产生轴向高频振动,电磁线圈2(4
‑
6)通入交流电可使铁芯(4
‑
5)磁极极性产生周期性变化,进而与
永磁铁(4
‑
8)发生周期性的排斥与吸引,带动待加工工件(1
‑
5)实现横向低频振动,从而实现轴向高频与横向低频的协同振动,提高抛光效率与质量,其他与具体实施方式一、二、三、四或五相同。
18.具体实施方式七:结合图1、图2、图3、图5和图6说明本实施方式所述的一种基于磁场耦合的双向协同振动抛光装置及方法,其特征在于:磁性剪切增稠介质(2
‑
9)与待加工工件(1
‑
5)发生相对运动时,磁性颗粒(5
‑
1)、磨粒(5
‑
2)、和分散相(5
‑
3)在分散介质(5
‑
4)中受到剪切力和磁场力的作用而形成具有剪切增稠效应的柔性增强复合粒子簇(5
‑
5),在磁场作用下沿磁力线(5
‑
6)分布;当磁芯(3
‑
1)下端为n极、球形磁极(3
‑
5)成n
‑
s
‑
n
‑
s和n
‑
n
‑
s
‑
s排布时,可分别产生沿六路磁力线(6
‑
1)和四路磁力线(6
‑
2),在对应的磁场形成具有剪切增稠效应的柔性增强复合粒子簇(5
‑
5),其他与具体实施方式一、二、三、四、五或六相同。
19.具体实施方式八:结合图1、图2和图3说明,本实施方式利用具体实施方式一、二、三、四、五、六或七中任意一个具体实施方式所述装置进行抛光步骤如下:(1)将待加工工件(1
‑
5)通过夹具(1
‑
6)固定在低频振动装置(1
‑
7)上,完成定位与装夹;(2)待加工工件(1
‑
5)通过精密位移平台(1
‑
8)移动至抛光区域;(3)开启磁场发生装置(1
‑
4)的电磁线圈1(2
‑
4)的控制开关,再将磁性剪切增稠介质(2
‑
9)放置于磁场发生装置(1
‑
4)的永磁装置(2
‑
8)的磁极套(3
‑
6)外部,在磁力线的作用下磁性剪切增稠介质(2
‑
9)形成柔性增强复合粒子簇(5
‑
5);(4)调节工业机器人(1
‑
1)、精密位移平台(1
‑
8)的相对位置,使磁性剪切增稠介质(2
‑
9)与待加工工件(1
‑
5)表面接触,并调整磁场发生装置(1
‑
4)与待加工工件(1
‑
5)表面之间的间隙;(5)输入电主轴(1
‑
2)与精密位移平台(1
‑
8)的控制信号,电主轴(1
‑
2)带动磁场发生装置(1
‑
4)旋转,精密位移平台(1
‑
8)进行快速进给,实现磁性剪切增稠介质(2
‑
9)与待加工工件(1
‑
5)表面相对移动;(6)超声振动装置(1
‑
3)接受信号后产生轴向高频振动,从而带动磁场发生装置进行轴向高频振动;(7)低频振动装置(1
‑
7)通入周期性交流电,可产生与交流电同频率的横向低频振动;(8)通过工业机器人(1
‑
1)的位姿调整、电主轴(1
‑
2)的高速旋转、精密位移平台(1
‑
8)的移动、磁场发生装置(1
‑
4)的耦合磁场、超声振动装置(1
‑
3)的轴向高频振动、低频振动装置(1
‑
7)的横向低频振动,耦合磁场中的轴向高频与横向低频的协同振动,提高抛光效率与质量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1