一种铝合金铸件的连续自动压铸设备及其工作方法与流程
1.本发明属于铝、铜、镁、钛合金清洁生产与深加工技术领域,特别涉及一种铝合金铸件的连续自动压铸设备。本发明还涉及一种铝合金铸件的连续自动压铸设备的工作方法。
背景技术:
2.铝合金是工业中应用最广泛的一类有色金属结构材料,在航空、航天、汽车、机械制造、船舶及化学工业中已大量应用,工业经济的飞速发展,对铝合金焊接结构件的需求日益增多,使铝合金的焊接性研究也随之深入。
3.铝合金零件的压铸成型是将熔融的液态铝合金浇入压铸机的压室中,通过压射冲头的运动,在高压作用下,以较高的速度填充入压铸模型腔内,并使铝合金在压力下凝固成型为铝合金压铸件的方法。制得的压铸件尺寸精度高、表面光洁、轮廓清晰。
4.随着科技的不断发展,铝合金的压铸设备也在不断改进,传统的压铸机尚有缺陷,有待改进。现有技术中至少存在如下问题没有得到解决: (1)传统的铝合金压铸件设备,整体重量较大,在生产区域一旦落地就很难调整位置,不具备灵活调整位置的功能;(5)传统的铝合金压铸件设备,自动化程度低,很多操作依靠人工进行,在压铸过程中容易因为高温滋生各类刺鼻有毒气体,影响工人健康,并且人工操作工作效率低下。
技术实现要素:
5.发明目的:为了克服以上不足,本发明的目的是提供一种铝合金铸件的连续自动压铸设备,解决了现有技术中的压铸设备占地面积较大,位置调整困难;在进行压铸产品生产时,部分工序通过人工操作实现的,不仅工作效率慢,而且压铸过程中产生的有害气体,会造成人体损伤的问题。
6.技术方案:一种铝合金铸件的连续自动压铸设备,包括嵌件上料单元、铝合金液上料单元、压铸单元、铝合金铸件收料单元和旋转模单元,所述嵌件上料单元、铝合金液上料单元、压铸单元和铝合金铸件收料单元设置在以旋转模单元为圆心的同一圆周上,所述旋转模单元可在360
°
范围内间歇45
°
旋转,所述旋转模单元划分为四个工位,分别为嵌件上料工位、等待工位、压铸工位和铝铸件下料工位,所述嵌件上料单元可夹持嵌件,并且嵌件上料单元可将嵌件置于旋转模单元内,所述铝合金液上料单元可向旋转模单元内倾倒铝合金液体,所述压铸单元可进行旋转模单元内嵌件和铝合金液的压铸,所述铝合金铸件收料单元可将旋转模单元内的铝合金铸件夹持取出。本发明的铝合金铸件的连续自动压铸设备,能够自动化的进行原料的上料,压铸的自动成型以及下料的自动进行,嵌件上料单元、铝合金液上料单元、压铸单元、铝合金铸件收料单元和旋转模单元根据生产节拍,自动化的进行生产,满足大批量铝合金铸件生产的需要。
7.进一步的,上述的铝合金铸件的连续自动压铸设备,所述嵌件上料单元和铝合金
铸件收料单元的结构相同,所述嵌件上料单元和铝合金铸件收料单元均包括支撑架体一、水平驱动电机一、水平驱动丝杆、水平直线导轨一、竖直支撑板一和夹持组件,所述水平驱动电机一、水平驱动丝杆和水平直线导轨一均设置在支撑架体一上,所述水平驱动电机一和水平驱动丝杆连接,所述水平驱动丝杆和水平直线导轨一平行设置,所述竖直支撑板一和水平驱动丝杆的丝杆螺母固定连接,并且竖直支撑板一和水平直线导轨一滑动连接,所述夹持组件设置在竖直支撑板一上。
8.进一步的,上述的铝合金铸件的连续自动压铸设备,所述夹持组件包括水平支撑板一、升降驱动气缸一、夹爪一、夹爪一连接板和一组导向柱一,所述水平支撑板一的一端和竖直支撑板一的竖直面固定连接,并且水平支撑板一和竖直支撑板一垂直设置,所述升降驱动气缸一设置在水平支撑板一上,并且升降驱动气缸一的活塞杆和夹爪一连接板连接,所述夹爪一设置在夹爪一连接板上,所述一组导向柱一的下端部和夹爪一连接板固定连接,并且一组导向柱一和水平支撑板一滑动连接,所述嵌件上料单元的夹爪一可夹持嵌件,所述铝合金铸件收料单元的夹爪一可夹持铝合金铸件。
9.进一步的,上述的铝合金铸件的连续自动压铸设备,所述铝合金液上料单元包括支撑架体二、水平驱动装置和铝合金液倾倒装置,所述水平驱动装置设置在支撑架体二上,所述铝合金液倾倒装置和水平驱动装置连接,所述铝合金液倾倒装置内存储有铝合金液。
10.进一步的,上述的铝合金铸件的连续自动压铸设备,所述水平驱动装置包括水平驱动电机二、水平驱动丝杆二、丝杆支撑座、导向柱二、一组丝杆螺母、导向滑板、水平支撑板二和竖直支撑板二,所述水平驱动电机二、丝杆支撑座和导向柱二均设置在支撑架体二上,所述水平驱动电机二和水平驱动丝杆二连接,所述水平驱动丝杆二设置在丝杆支撑座上,所述导向柱二和水平驱动丝杆二平行设置,所述一组丝杆螺母和水平驱动丝杆二螺纹连接,所述导向滑板和一组丝杆螺母其中之一连接,并且导向滑板和导向柱二滑动连接,所述水平支撑板二与一组丝杆螺母和导向滑板固定连接,所述竖直支撑板二的上端部和水平支撑板二的下端面固定连接,并且竖直支撑板二和水平支撑板二垂直设置,所述铝合金液倾倒装置和竖直支撑板二的竖直面连接。
11.进一步的,上述的铝合金铸件的连续自动压铸设备,所述铝合金液倾倒装置包括支撑座、倾倒翻转气缸和铝合金液料斗,所述支撑座和竖直支撑板二的竖直面固定连接,所述倾倒翻转气缸的一端和支撑座铰接,并且倾倒翻转气缸的活塞杆和铝合金液料斗铰接,所述铝合金液料斗的一端和支撑座铰接。
12.进一步的,上述的铝合金铸件的连续自动压铸设备,所述压铸单元包括支撑架体三、水平支撑板三、压铸头、压铸头连接板、一组导向柱三和压铸驱动油缸,所述水平支撑板三和支撑架体三固定连接,所述压铸驱动油缸设置在水平支撑板三上,并且压铸驱动油缸的活塞杆和压铸头连接板连接,所述压铸头和压铸头连接板连接,所述一组导向柱三的下端部和压铸头连接板固定连接,并且一组导向柱三和水平支撑板三滑动连接。
13.进一步的,上述的铝合金铸件的连续自动压铸设备,所述旋转模单元包括机台、压铸模具、旋转装置和四个机械手,所述压铸模具和旋转装置均设置在机台上,并且压铸模具位于压铸头的正下方,所述四个机械手设置在旋转装置上,并且四个机械手以旋转装置的中心为圆心按照环形阵列的方式设置,所述旋转装置可驱动四个机械手在360
°
范围内间歇45
°
旋转。
14.进一步的,上述的铝合金铸件的连续自动压铸设备,所述旋转装置包括支撑架体四、旋转滑台、推力球轴承和转盘,所述支撑架体四固定设置在机台上,所述旋转滑台和推力球轴承设置在支撑架体四上,并且旋转滑台通过推力球轴承和转盘连接,所述旋转滑台可驱动转盘在360
°
范围内间歇45
°
旋转,所述四个机械手的一端和转盘连接,并且四个机械手以转盘的中心为圆心按照环形阵列的方式设置;所述机械手包括支撑臂、存储筒和夹爪二,所述支撑臂的一端和转盘固定连接,所述存储筒设置在支撑臂远离转盘的端部上,所述压铸头位于存储筒的正上方,并且压铸头和存储筒同轴设置,所述存储筒沿竖直方向设有贯穿的通孔,所述夹爪二设置在通孔的内壁上,所述夹爪二可夹持嵌件和铝合金铸件。
15.本发明还提供一种铝合金铸件的连续自动压铸设备的工作方法,包括以下步骤:s1、嵌件上料:初始时,四个机械手其中之一和压铸模具正对设置,嵌件上料单元工作,水平驱动电机一启动,水平驱动电机一带动水平驱动丝杆旋转,驱动夹持组件沿着水平直线导轨一移动到嵌件上料仓的一侧,夹爪一位于嵌件的正上方;s2、升降驱动气缸一启动,升降驱动气缸一的活塞杆伸出,推动夹爪一位于嵌件的上方,使得夹爪一夹持住嵌件;s3、升降驱动气缸一的活塞杆收回,使得夹爪一返回初始高度,水平驱动电机一启动,水平驱动电机一带动水平驱动丝杆旋转,驱动夹持组件沿着水平直线导轨一移动到旋转模单元的一侧,此时夹爪一位于存储筒的正上方;s4、升降驱动气缸一启动,升降驱动气缸一的活塞杆伸出,推动夹爪一位于存储筒的正上方,夹爪二打开,夹爪一将嵌件释放在存储筒内,夹爪二夹持住嵌件;s5、旋转滑台驱动转盘旋转45
°
,此时压铸模具位于两个机械手之间的间隙内,压铸模具处于露出的状态;s6、铝合金液料斗内存入铝合金液,水平驱动电机二启动,带动水平驱动丝杆二旋转,使得铝合金液倾倒装置移动到压铸模具的正上方;s7、倾倒翻转气缸的活塞杆收回,使得铝合金液料斗翻转,铝合金液料斗内的铝合金液倾倒进入压铸模具的型腔内,水平驱动电机二启动,带动铝合金液倾倒装置移动至远离压铸模具的一端,向铝合金液料斗冲入铝合金液,以备下一次压铸使用;s8、旋转滑台驱动转盘旋转45
°
,夹持有嵌件的机械手从嵌件上料工位旋转至等待工位,等待压铸的时长,旋转滑台再次驱动转盘旋转45
°
,停留指定时长,旋转滑台再次驱动转盘旋转45
°
,夹持有嵌件的机械手从等待工位旋转至压铸工位,此时夹爪二与压铸模具的型腔针对设置;s9、夹爪二打开,夹爪二夹持的嵌件落入充有铝合金液的压铸模具的型腔内;s10、压铸驱动油缸的活塞杆伸出,压铸驱动油缸推动压铸头穿过存储筒,并且压铸头压入压铸模具的型腔内将嵌件和铝合金液压铸为铝合金铸件;s11、压铸完成,压铸驱动油缸的活塞杆收回,带动压铸头从压铸模具抽离,并且压铸头返回初始位置,以便进行下一次压铸;s12、压铸模具的顶起部分启动,将铝合金铸件从压铸模具的型腔内顶起,夹爪二夹持住铝合金铸件;s13、旋转滑台驱动转盘旋转45
°
,停留等待,旋转滑台再次驱动转盘旋转45
°
,使得夹持有铝合金铸件的夹爪二的机械手从压铸工位旋转至铝铸件下料工位;
s14、铝合金铸件收料单元启动,驱动夹持组件移动至夹持有铝合金铸件的夹爪二的机械手的正上方;s15、升降驱动气缸一的活塞杆伸出,推动夹爪一下降至铝合金铸件的上方,并且铝合金铸件收料单元的夹爪一夹持住铝合金铸件,夹爪二释放铝合金铸件;s16、升降驱动气缸一的活塞杆收回,带动铝合金铸件上升大一定返回初始位置;s17、铝合金铸件收料单元启动,启动夹持住铝合金铸件的夹持组件移动至收料工位处,铝合金铸件收料单元的夹爪一将铝合金铸件释放在收料工位处;s18、不断重复上述步骤s1~ s17,进行铝合金铸件的连续压铸。
16.上述技术方案可以看出,本发明具有如下有益效果:本发明所述的铝合金铸件的连续自动压铸设备,将圆周面划分为嵌件上料工位、等待工位、压铸工位和铝铸件下料工位四个工位,嵌件上料单元和铝合金液上料单元能够将原料通过两个工序分别上料至旋转模单元上,再通压铸单元进行铝合金铸件的压铸,最后通过铝合金铸件收料单元将铝合金铸件收料,实现压铸件的上料、压铸、收料的连续有序的进行,各工序自动化、以及各位置上的协同配合,能够实现低成本化和高效率化的铝合金铸件的加工生产。本发明的生产方法通过对铝合金压铸设备的结构进行优化,改善压铸工艺,能够在连续生产的同时,达到产品外观质量要求,尺寸精度也很高,完全符合零件的使用要求。
附图说明
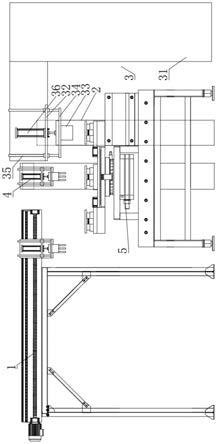
17.图1为本发明所述的铝合金铸件的连续自动压铸设备的结构示意图;图2为本发明所述的嵌件上料单元的结构示意图;图3为本发明所述的铝合金液上料单元的结构示意图;图4为本发明所述的旋转模单元的主视图;图5为本发明所述的旋转模单元的俯视图。
18.图中:嵌件上料单元1、支撑架体一11、水平驱动电机一12、水平驱动丝杆13、水平直线导轨一14、竖直支撑板一15、夹持组件16、水平支撑板一161、升降驱动气缸一162、夹爪一163、夹爪一连接板164、导向柱一165、铝合金液上料单元2、支撑架体二21、水平驱动装置22、水平驱动电机二221、水平驱动丝杆二222、丝杆支撑座223、导向柱二224、丝杆螺母225、导向滑板226、水平支撑板二227、竖直支撑板二228、铝合金液倾倒装置23、支撑座231、倾倒翻转气缸232、铝合金液料斗233、压铸单元3、支撑架体三31、水平支撑板三32、压铸头33、压铸头连接板34、导向柱三35、压铸驱动油缸36、铝合金铸件收料单元4、旋转模单元5、机台51、压铸模具52、旋转装置53、支撑架体四531、旋转滑台532、推力球轴承533、转盘534、机械手54、支撑臂541、存储筒542、夹爪二543、通孔544。
具体实施方式
19.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
20.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“顺时针”、“逆
时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
21.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上,除非另有明确的限定。
22.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
23.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
实施例
24.如图1所示的铝合金铸件的连续自动压铸设备,包括嵌件上料单元1、铝合金液上料单元2、压铸单元3、铝合金铸件收料单元4和旋转模单元5,所述嵌件上料单元1、铝合金液上料单元2、压铸单元3和铝合金铸件收料单元4设置在以旋转模单元5为圆心的同一圆周上,所述旋转模单元5可在360
°
范围内间歇45
°
旋转,所述旋转模单元5划分为四个工位,分别为嵌件上料工位、等待工位、压铸工位和铝铸件下料工位,所述嵌件上料单元1可夹持嵌件,并且嵌件上料单元1可将嵌件置于旋转模单元5内,所述铝合金液上料单元2可向旋转模单元5内倾倒铝合金液体,所述压铸单元3可进行旋转模单元5内嵌件和铝合金液的压铸,所述铝合金铸件收料单元4可将旋转模单元5内的铝合金铸件夹持取出。
25.如图2所示的嵌件上料单元1和铝合金铸件收料单元4的结构相同,所述嵌件上料单元1和铝合金铸件收料单元4均包括支撑架体一11、水平驱动电机一12、水平驱动丝杆13、水平直线导轨一14、竖直支撑板一15和夹持组件16,所述水平驱动电机一12、水平驱动丝杆13和水平直线导轨一14均设置在支撑架体一11上,所述水平驱动电机一12和水平驱动丝杆13连接,所述水平驱动丝杆13和水平直线导轨一14平行设置,所述竖直支撑板一15和水平驱动丝杆13的丝杆螺母固定连接,并且竖直支撑板一15和水平直线导轨一14滑动连接,所述夹持组件16设置在竖直支撑板一15上。
26.上述结构中,夹持组件16包括水平支撑板一161、升降驱动气缸一162、夹爪一163、夹爪一连接板164和一组导向柱一165,所述水平支撑板一161的一端和竖直支撑板一15的竖直面固定连接,并且水平支撑板一161和竖直支撑板一15垂直设置,所述升降驱动气缸一162设置在水平支撑板一161上,并且升降驱动气缸一162的活塞杆和夹爪一连接板164连
接,所述夹爪一163设置在夹爪一连接板164上,所述一组导向柱一165的下端部和夹爪一连接板164固定连接,并且一组导向柱一165和水平支撑板一161滑动连接,所述嵌件上料单元1的夹爪一163可夹持嵌件,所述铝合金铸件收料单元4的夹爪一163可夹持铝合金铸件。
27.如图3所示的铝合金液上料单元2包括支撑架体二21、水平驱动装置22和铝合金液倾倒装置23,所述水平驱动装置22设置在支撑架体二21上,所述铝合金液倾倒装置23和水平驱动装置22连接,所述铝合金液倾倒装置23内存储有铝合金液。
28.上述结构中,水平驱动装置22包括水平驱动电机二221、水平驱动丝杆二222、丝杆支撑座223、导向柱二224、一组丝杆螺母225、导向滑板226、水平支撑板二227和竖直支撑板二228,所述水平驱动电机二221、丝杆支撑座223和导向柱二224均设置在支撑架体二21上,所述水平驱动电机二221和水平驱动丝杆二222连接,所述水平驱动丝杆二222设置在丝杆支撑座223上,所述导向柱二224和水平驱动丝杆二222平行设置,所述一组丝杆螺母225和水平驱动丝杆二222螺纹连接,所述导向滑板226和一组丝杆螺母225其中之一连接,并且导向滑板226和导向柱二224滑动连接,所述水平支撑板二227与一组丝杆螺母225和导向滑板226固定连接,所述竖直支撑板二228的上端部和水平支撑板二227的下端面固定连接,并且竖直支撑板二228和水平支撑板二227垂直设置,所述铝合金液倾倒装置23和竖直支撑板二228的竖直面连接。
29.此外,铝合金液倾倒装置23包括支撑座231、倾倒翻转气缸232和铝合金液料斗233,所述支撑座231和竖直支撑板二228的竖直面固定连接,所述倾倒翻转气缸232的一端和支撑座231铰接,并且倾倒翻转气缸232的活塞杆和铝合金液料斗233铰接,所述铝合金液料斗233的一端和支撑座231铰接。
30.上述结构中,压铸单元3包括支撑架体三31、水平支撑板三32、压铸头33、压铸头连接板34、一组导向柱三35和压铸驱动油缸36,所述水平支撑板三32和支撑架体三31固定连接,所述压铸驱动油缸36设置在水平支撑板三32上,并且压铸驱动油缸36的活塞杆和压铸头连接板34连接,所述压铸头33和压铸头连接板34连接,所述一组导向柱三35的下端部和压铸头连接板34固定连接,并且一组导向柱三35和水平支撑板三32滑动连接。
31.如图4、5所示的旋转模单元5包括机台51、压铸模具52、旋转装置53和四个机械手54,所述压铸模具52和旋转装置53均设置在机台51上,并且压铸模具52位于压铸头33的正下方,所述四个机械手54设置在旋转装置53上,并且四个机械手54以旋转装置53的中心为圆心按照环形阵列的方式设置,所述旋转装置53可驱动四个机械手54在360
°
范围内间歇45
°
旋转。
32.其中,旋转装置53包括支撑架体四531、旋转滑台532、推力球轴承533和转盘534,所述支撑架体四531固定设置在机台51上,所述旋转滑台532和推力球轴承533设置在支撑架体四531上,并且旋转滑台532通过推力球轴承533和转盘534连接,所述旋转滑台532可驱动转盘534在360
°
范围内间歇45
°
旋转,所述四个机械手54的一端和转盘534连接,并且四个机械手54以转盘534的中心为圆心按照环形阵列的方式设置;所述机械手54包括支撑臂541、存储筒542和夹爪二543,所述支撑臂541的一端和转盘534固定连接,所述存储筒542设置在支撑臂541远离转盘534的端部上,所述压铸头33位于存储筒542的正上方,并且压铸头33和存储筒542同轴设置,所述存储筒542沿竖直方向设有贯穿的通孔544,所述夹爪二543设置在通孔544的内壁上,所述夹爪二543可夹持嵌件和铝合金铸件。
33.基于上述结构的基础上,一种铝合金铸件的连续自动压铸设备的工作方法,包括以下步骤:s1、嵌件上料:初始时,四个机械手54其中之一和压铸模具52正对设置,嵌件上料单元1工作,水平驱动电机一12启动,水平驱动电机一12带动水平驱动丝杆13旋转,驱动夹持组件16沿着水平直线导轨一14移动到嵌件上料仓的一侧,夹爪一163位于嵌件的正上方;s2、升降驱动气缸一162启动,升降驱动气缸一162的活塞杆伸出,推动夹爪一163位于嵌件的上方,使得夹爪一163夹持住嵌件;s3、升降驱动气缸一162的活塞杆收回,使得夹爪一163返回初始高度,水平驱动电机一12启动,水平驱动电机一12带动水平驱动丝杆13旋转,驱动夹持组件16沿着水平直线导轨一14移动到旋转模单元5的一侧,此时夹爪一163位于存储筒542的正上方;s4、升降驱动气缸一162启动,升降驱动气缸一162的活塞杆伸出,推动夹爪一163位于存储筒542的正上方,夹爪二543打开,夹爪一163将嵌件释放在存储筒542内,夹爪二543夹持住嵌件;s5、旋转滑台532驱动转盘534旋转45
°
,此时压铸模具52位于两个机械手54之间的间隙内,压铸模具52处于露出的状态;s6、铝合金液料斗233内存入铝合金液,水平驱动电机二221启动,带动水平驱动丝杆二222旋转,使得铝合金液倾倒装置23移动到压铸模具52的正上方;s7、倾倒翻转气缸232的活塞杆收回,使得铝合金液料斗233翻转,铝合金液料斗233内的铝合金液倾倒进入压铸模具52的型腔内,水平驱动电机二221启动,带动铝合金液倾倒装置23移动至远离压铸模具52的一端,向铝合金液料斗233冲入铝合金液,以备下一次压铸使用;s8、旋转滑台532驱动转盘534旋转45
°
,夹持有嵌件的机械手54从嵌件上料工位旋转至等待工位,等待压铸的时长,旋转滑台532再次驱动转盘534旋转45
°
,停留指定时长,旋转滑台532再次驱动转盘534旋转45
°
,夹持有嵌件的机械手54从等待工位旋转至压铸工位,此时夹爪二543与压铸模具52的型腔针对设置;s9、夹爪二543打开,夹爪二543夹持的嵌件落入充有铝合金液的压铸模具52的型腔内;s10、压铸驱动油缸36的活塞杆伸出,压铸驱动油缸36推动压铸头33穿过存储筒542,并且压铸头33压入压铸模具52的型腔内将嵌件和铝合金液压铸为铝合金铸件;s11、压铸完成,压铸驱动油缸36的活塞杆收回,带动压铸头33从压铸模具52抽离,并且压铸头33返回初始位置,以便进行下一次压铸;s12、压铸模具52的顶起部分启动,将铝合金铸件从压铸模具52的型腔内顶起,夹爪二543夹持住铝合金铸件;s13、旋转滑台532驱动转盘534旋转45
°
,停留等待,旋转滑台532再次驱动转盘534旋转45
°
,使得夹持有铝合金铸件的夹爪二543的机械手54从压铸工位旋转至铝铸件下料工位;s14、铝合金铸件收料单元4启动,驱动夹持组件16移动至夹持有铝合金铸件的夹爪二543的机械手54的正上方;s15、升降驱动气缸一162的活塞杆伸出,推动夹爪一163下降至铝合金铸件的上
方,并且铝合金铸件收料单元4的夹爪一163夹持住铝合金铸件,夹爪二543释放铝合金铸件;s16、升降驱动气缸一162的活塞杆收回,带动铝合金铸件上升大一定返回初始位置;s17、铝合金铸件收料单元4启动,启动夹持住铝合金铸件的夹持组件16移动至收料工位处,铝合金铸件收料单元4的夹爪一163将铝合金铸件释放在收料工位处;s18、不断重复上述步骤s1~ s17,进行铝合金铸件的连续压铸。
34.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进,这些改进也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1