自动抛光机的制作方法
1.本技术涉及抛光设备技术领域,特别涉及一种自动抛光机。
背景技术:
2.工业生产中经常需要采用抛光机对工件进行抛光。传统的抛光机在生产应用中依靠人工打磨,不仅存在安全隐患,还存在效率低及工件良率低等问题。
技术实现要素:
3.鉴于上述状况,有必要提供一种自动抛光机,以提高工作效率及工件良率。
4.本技术的实施例提供一种自动抛光机,包括机架、定位组件、机械手组件、供纸组件、第一砂纸和第二砂纸。定位组件设于所述机架,所述定位组件可用于定位工件。机械手组件设于所述机架,所述机械手组件的端部具有移动部,所述移动部可相对所述机架移动,以靠近或远离所述定位组件。所述移动部设有第一加工部和第二加工部,所述第一加工部可用于粗加工所述工件,所述第二加工部可用于精加工所述工件。供纸组件设于所述机架,所述移动部可移动靠近或远离所述供纸组件。第一砂纸设于所述供纸组件,所述第一加工部可吸取所述第一砂纸,并使用所述第一砂纸粗加工所述工件。第二砂纸设于所述供纸组件,所述第二加工部可吸取所述第二砂纸,并使用所述第二砂纸精加工所述工件。上述自动抛光机通过机械手组件上的第一加工部可移动至供纸组件处获取第一砂纸、第二加工部可移动至供纸组件处获取第二砂纸,使用第一砂纸和第二砂纸加工工件,自动实现不同精细程度的加工,提高工作效率及工件的良率。
5.在本技术的一些实施例中,所述供纸组件包括基体、第一机构和第二机构。基体设于所述机架。第一机构连接于所述基体,包括可用于承载所述第一砂纸的第一托盘,所述第一托盘可相对所述基体移动。第二机构连接于所述基体,包括可用于承载所述第二砂纸的第二托盘,所述第二托盘可相对所述基体移动。第一托盘可承载第一砂纸移动以供第一加工部精准的获取第一砂纸,第二托盘可承载第二砂纸移动以供第二加工部精准的获取第二砂纸,提高自动化程度及工作效率。
6.在本技术的一些实施例中,所述第一机构还包括第一驱动件,所述第一驱动件连接所述基体和所述第一托盘,所述第一驱动件可驱动所述第一托盘移动。所述第二机构还包括第二驱动件,所述第二驱动件连接所述基体和所述第二托盘,所述第二驱动件可驱动所述第二托盘移动。
7.在本技术的一些实施例中,所述机械手组件包括机械臂、第一传感器和第二传感器。机械臂的一端连接所述机架、另一端连接所述移动部,所述机械臂动作可使所述移动部相对所述机架移动。第一传感器设于所述移动部,所述第一传感器连接所述第一加工部和所述机械臂,所述第一传感器可感知并控制所述第一加工部作用于所述工件的压力。第二传感器设于所述移动部,所述第二传感器连接所述第二加工部和所述机械臂,所述第二传感器可感知并控制所述第二加工部作用于所述工件的压力。通过第一传感器和第二传感
器,可精准的控制第一加工部和第二加工部对工件的加工压力,提高加工精度及加工质量。
8.在本技术的一些实施例中,自动抛光机还包括喷水组件,所述喷水组件设于所述机架,所述喷水组件包括喷头,所述喷头可喷水以吸附所述第一加工部和/或所述第二加工部加工所述工件时的粉尘,减少粉尘对人体的危害,及减少粉尘燃爆的风险。
9.在本技术的一些实施例中,自动抛光机还包括吹风组件,所述吹风组件设于所述机架,所述吹风组件包括吹风头,所述吹风头可吹出风以将所述工件上的水珠吹离,将工件清洁,减少水珠对工件的影响。
10.在本技术的一些实施例中,自动抛光机还包括第一控制器,所述第一控制器设于所述机架,所述第一控制器连接所述机械手组件,并能够精准控制所述机械手组件动作以加工所述工件,可提高工件的加工质量及良率。
11.在本技术的一些实施例中,自动抛光机还包括第二控制器,所述第二控制器设于所述机架,所述第二控制器连接所述喷水组件,并能够控制所述喷头喷水。
12.在本技术的一些实施例中,所述机械手组件还包括第三加工部,所述第三加工部设于所述移动部。
13.在本技术的一些实施例中,自动抛光机还包括第一区域和第二区域。第一区域设于所述机架,所述第一区域可用于放置未加工的所述工件。第二区域设于所述机架,所述第二区域可用于放置加工完毕的所述工件。所述移动部可移动靠近或远离所述第一区域和/或所述第二区域。所述机械手组件还包括抓取部,所述抓取部设于所述移动部,所述移动部可带动所述抓取部移动,以使得所述抓取部抓取所述工件在所述第一区域、所述定位组件和所述第二区域间转移。
附图说明
14.图1是本技术的一个实施例中自动抛光机的第一视图。
15.图2是本技术的一个实施例中自动抛光机的第二视图。
16.图3是本技术的一个实施例中机械手组件的第一视图。
17.图4是本技术的一个实施例中机械手组件的第二视图。
18.图5是本技术的一个实施例中供纸组件的立体结构示意图。
19.图6是本技术的一个实施例中自动抛光机的局部视图。
20.主要元件符号说明
21.自动抛光机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
22.机架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ123.定位组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ224.定位平台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21
25.机械手组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ326.机械臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31
27.第一部分
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
311
28.第二部分
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
312
29.第三部分
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
313
30.移动部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
32
31.抓取部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33
32.第一加工部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
34
33.第二加工部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
35
34.第三加工部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
36
35.供纸组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ436.基体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
41
37.第一机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42
38.第一驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
421
39.第一伸缩杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4211
40.第一托盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
422
41.第二机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
43
42.第二驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
431
43.第二伸缩杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4311
44.第二托盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
432
45.第一导向柱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
44
46.第二导向柱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
45
47.喷水组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ548.喷头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
51
49.吹风组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ650.吹风头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
61
51.第一控制器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
71
52.第二控制器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
72
53.第一区域
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
81
54.第二区域
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
82
55.防护罩
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ956.敞开口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
91
57.容腔空间
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
92
58.工件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200
59.如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
60.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。
61.需要说明的是,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中设置的元件。当一个元件被认为是“设置在”另一个元件,它可以是直接设置在另一个元件上或者可能同时存在居中设置的元件。
62.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。本文所使用的术语“和/或”包括一个或多个相
关的所列项目的任意的和所有的组合。
63.本技术的实施例提供一种自动抛光机,包括机架,定位组件和机械手组件。定位组件设于所述机架,所述定位组件可用于定位工件。机械手组件设于所述机架,所述机械手组件的端部具有移动部,所述移动部可相对所述机架移动,以靠近或远离所述定位组件。所述机械手组件包括设于所述移动部的第一加工部和第二加工部,所述第一加工部可用于粗加工所述工件,所述第二加工部可用于精加工所述工件。上述自动抛光机通过机械手组件上的第一加工部和第二加工部,可实现对工件的自动粗加工及自动精加工,提高工作效率及工件的良率。
64.下面结合附图,对本技术的实施例作进一步的说明。
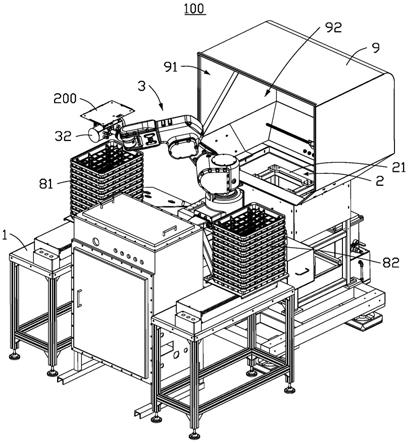
65.如图1和图2所示,本技术的实施方式提供一种自动抛光机100,自动抛光机100可用于加工工件200,对工件200表面进行抛光。自动抛光机100包括机架1、定位组件2、机械手组件3、供纸组件4、第一区域81和第二区域82。
66.定位组件2设于机架1,包括定位平台21,定位平台21可用于承载固定工件200。
67.第一区域81设于机架1,第一区域81可用于放置未加工的工件200。第二区域82设于机架1,第二区域82可用于放置加工完毕的工件200。
68.请结合图2、图3和图4,机械手组件3设于机架1,机械手组件3包括机械臂31、移动部32、抓取部33、第一加工部34和第二加工部35。
69.移动部32设于机械臂31的端部,机械臂31动作可使移动部32相对机架1移动,以靠近或远离所述第一区域81、靠近或远离所述第二区域82及靠近或远离所述定位平台21。
70.抓取部33设于移动部32,移动部32可带动抓取部33移动。抓取部33可连接并吸附工件200,使移动部32带动工件200移动,以将工件200在第一区域81、第二区域82和定位平台21之间转移。
71.在一实施例中,抓取部33包括吸盘,抓取部33通过吸盘吸附连接工件200。吸盘的数量可以为一个,也可以为两个、三个或更多个。
72.第一加工部34和第二加工部35设于移动部32,移动部32可带动第一加工部34和第二加工部35移动。第一加工部34可用于粗加工工件200,第二加工部35可用于精加工工件200。通过第一加工部34和第二加工部35协同作业,可提高工件200的加工精度及良率。
73.为了便于理解及描述,下面以该自动抛光机100放置于水平面,机械手组件3设于机架1上方为例作进一步的说明。
74.机械臂31包括第一部分311、第二部分312和第三部分313。第一部分311连接于机架1,可相对机架1转动。第二部分312连接于第一部分311远离机架1的端部,第二部分312可相对机架1、以与第一部分311的连接处为中心在竖直方向上转动。第三部分313的一端连接第二部分312远离第一部分311的端部、另一端连接移动部32,第三部分可相对机架1、以与第二部分312的连接处为中心在竖直方向上转动。移动部32可相对机架1、以与第三部分313的连接处为中心翻转。通过第一部分311、第二部分312、第三部分313和移动部32的协同动作,可使移动部32灵活的相对机架1移动、翻转,以使得第一加工部34和第二加工部35精准的加工工件200。
75.在一实施例中,第一加工部34设于移动部32的一端,第二加工部35设于移动部32的另一端。
76.供纸组件4设于机架1,机械臂31动作可使移动部32相对机架1移动靠近或远离供纸组件4。供纸组件4包括第一砂纸和第二砂纸(图未示),第一砂纸可用于粗加工工件200,第二砂纸可用于精加工工件200。
77.当移动部32带动第一加工部34和/或第二加工部35移动至供纸组件4处时,第一加工部34可获取并吸附第一砂纸,第二加工部35可获取并吸附第二砂纸,使用第一砂纸粗加工工件200和/或使用第二砂纸精加工工件200,以提高工件200的加工质量及良率。
78.在一实施例中,第一加工部34上设有吸盘,第一加工部34通过吸盘吸附连接第一砂纸。
79.在一实施例中,第二加工部35上设有吸盘,第二加工部35通过吸盘吸附连接第二砂纸。
80.在一实施例中,机械手组件3还包括第三加工部36,第三加工部36设于移动部32。第三加工部36可直接作用于工件200,以加工工件200。第一加工部34、第二加工部35和第三加工部36协同作业,可提高工件200的加工精度及良率。
81.在一实施例中,机械手组件3还包括第一传感器和第二传感器(图未示),第一传感器设于移动部32,第一传感器连接第一加工部34和机械臂31,第一传感器可感知并控制第一加工部34作用于工件200的压力,使第一加工部34对工件200持续输出恒定的加工压力,以保证加工质量,提高加工精度。
82.第二传感器设于移动部32,第二传感器连接第二加工部35和机械臂31,第二传感器可感知并控制第二加工部35作用于工件200的压力,使第二加工部35对工件200持续输出恒定的加工压力,以保证加工质量,提高加工精度。
83.请结合图2和图5,供纸组件4还包括基体41、第一机构42和第二机构43。基体41设于机架1,第一机构42和第二机构43连接于基体41。第一机构42可用于承载放置第一砂纸,第二机构43可用于承载放置第二砂纸。
84.第一机构42包括第一驱动件421和第一托盘422,第一托盘422可用于承载放置第一砂纸。第一驱动件421连接基体41和第一托盘422,第一驱动件421可驱动第一托盘422相对基体41移动。
85.第二机构43包括第二驱动件431和第二托盘432,第二托盘432可用于承载放置第二砂纸。第二驱动件431连接基体41和第二托盘432,第二驱动件431可驱动第二托盘432相对基体41移动。
86.为了便于理解及描述,下面以第一托盘422和第二托盘432设于基体41上方为例作进一步的说明。第一砂纸设于第一托盘422远离基体41的一侧,第二砂纸设于第二托盘432远离基体41的一侧。
87.在一实施例中,第一驱动件421包括第一伸缩杆4211,第一驱动件421可驱动第一伸缩杆4211做伸缩运动。第一伸缩杆4211连接第一托盘422,第一伸缩杆4211可带动第一托盘422移动。
88.在一实施例中,第二驱动件431包括第二伸缩杆4311,第二驱动件431可驱动第二伸缩杆4311做伸缩运动。第二伸缩杆4311连接第二托盘432,第二伸缩杆4311可带动第二托盘432移动。
89.在一实施例中,供纸组件4还包括第一导向柱44,第一导向柱44连接基体41,第一
导向柱44的中心轴线与第一伸缩杆4211的中心轴线平行。第一托盘422套接于第一导向柱44,第一导向柱44可导引第一托盘422移动,提高第一托盘422的移动稳定性。
90.在一实施例中,供纸组件4还包括第二导向柱45,第二导向柱45连接基体41,第二导向柱45的中心轴线与第二伸缩杆4311的中心轴线平行。第二托盘432套接于第二导向柱45,第二导向柱45可导引第二托盘432移动,提高第二托盘432的移动稳定性。
91.当第一砂纸消耗一部分后,第一砂纸的高度降低,第一驱动件421驱动第一托盘422移动远离基体41,使第一托盘422上第一砂纸上升至预设位置,以供第一加工部34精准的获取第一砂纸。
92.在一实施例中,第一驱动件421包括但不限于气动推杆、液压推杆或电动推杆中的任一种。
93.在一实施例中,第二驱动件431包括但不限于气动推杆、液压推杆或电动推杆中的任一种。
94.在一实施例中,自动抛光机100还包括第一控制器71,第一控制器71设于机架1,第一控制器71连接机械手组件3,可控制机械手组件3动作,使机械手组件3自动作业加工工件200,提高自动抛光机100的自动化程度,提高工作效率。
95.可选的,第一控制器71连接机械臂31、移动部32、第一传感器和第二传感器,第一控制器71可根据第一传感器和第二传感器感知到的压力信息控制机械臂31,以控制移动部32作用于工件的压力。
96.请结合图1、图2和图6,在一实施例中,自动抛光机100还包括喷水组件5,喷水组件5设于机架1。喷水组件5包括喷头51,喷头51朝向定位平台21区域。当第一加工部34、第二加工部35和第三加工部36中的至少之一加工工件200时,喷头51可喷水,以将加工产生的粉尘吸附,减少空气中粉尘的含量,减少粉尘对人体的危害,及减少粉尘燃爆的风险。
97.在一实施例中,自动抛光机100还包括吹风组件6,吹风组件6设于机架1。吹风组件6包括吹风头61,吹风头61朝向定位平台21区域。吹风头61可朝定位平台21上的工件200吹风,使工件200上的水珠脱离工件200,清洁工件200表面,减少水珠及水珠上附着的粉尘对工件200的影响。
98.在一实施例中,自动抛光机100还包括第二控制器72,第二控制器72设于机架1,第二控制器72连接喷水组件5和/或吹风组件6,可控制喷头51喷水和/或控制吹风头61吹风,自动除尘及清洁工件200表面,可提高自动抛光机100的自动化程度,节约人工成本及提高工作效率。
99.在一实施例中,自动抛光机100还包括防护罩9,防护罩9设于机架1,防护罩9具有敞开口91并形成一容腔空间92。定位平台21、喷头51和吹风头61设于容腔空间92内,在自动抛光机100进行加工作业时,防护罩9可以起到遮蔽防护的作用,减少加工产生的粉尘飞扬及减少喷头51喷出的水珠飞溅,减少对环境的影响。敞开口91朝向机械手组件3的一侧,使得移动部32可以进入容腔空间92,以加工工件200。
100.另外,本领域技术人员还可在本技术精神内做其它变化,当然,这些依据本技术精神所做的变化,都应包含在本技术所公开的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1