一种机器人熔覆焊接装置的制作方法
1.本发明涉及激光熔覆装置,尤其涉及一种机器人熔覆焊接装置。
背景技术:
2.激光熔覆是一种新的表面改性技术。它通常在基材表面添加熔覆材料,并利用高能密度的激光束使之与基材表面薄层一起熔凝,在基层表面形成冶金结合的材料熔覆层。
3.激光熔覆的工艺过程是送粉器在一定压力下把粉末送到焦点位置,对粉材料熔化,将粉材料熔于所需的板材上面。但是,目前的激光熔覆焊接仅用于二维建模,进行平面方向的运动,运动方式单一,操作不灵活,熔覆焊接效率不高。
技术实现要素:
4.本发明所要解决的技术问题是,提供一种运动方式灵活的机器人熔覆焊接装置。
5.为了解决上述技术问题,本发明是通过以下技术方案实现的:一种机器人熔覆焊接装置,具有abb机器人和固定安装在abb机器人上的熔覆头,所述abb机器人一侧设置有用于向熔覆头送料的送粉器,正面设置有旋转工作台,旋转工作台与所述abb机器人之间具有间距;所述旋转工作台包括底座,底座顶部设置有两个左右对称的支撑座,左右两个支撑座的对称面上分别设置有主动旋转卡盘和从动旋转卡盘,主动旋转卡盘和从动旋转卡盘左右对称且均通过轴承活动连接在对应的支撑座上,底座顶部位于左侧的支撑座上固定设置有旋转电机,所述旋转电机与所述主动旋转卡盘传动连接。
6.进一步地,所述主动旋转卡盘和从动旋转卡盘之间卡接有翻转工作台,所述翻转工作台包括柱状结构的轴杆,所述轴杆的左右两端分别卡接在主动旋转卡盘和从动旋转卡盘上,所述轴杆正面中心固定设置有翻转电机,背面中心设置有与所述翻转电机传动连接的翻转卡盘,所述翻转卡盘与所述abb机器人前后对应。
7.进一步地,所述轴杆正面中心设置有上下齐平的电机安装部,电机安装部的中心设置有开口向外的电机安装腔,电机安装腔底部中心设置有前后连通的轴接孔,所述翻转电机通过螺栓固定安装在电机安装腔内,翻转电机的传动轴穿过轴接孔与所述翻转卡盘固定连接在一起;所述轴杆的背面中心设置有上下齐平的卡盘安装部,所述卡盘安装部内通过螺栓固定连接有固定座,所述翻转卡盘设置在固定座的端面外侧,固定座的端面中心设置有方便传动轴与翻转卡盘连接的衔接孔。
8.进一步地,所述传动轴与轴接孔和衔接孔之间通过轴承活动连接。
9.进一步地,所述abb机器人与旋转工作台之间的间距内设置有车床尾座。
10.进一步地,所述底座顶面设置有横向设置且左右连通的倒“t”型滑槽,所述滑槽具有多条,前后等间距并列设置,所述支撑座底部设置有与所述滑槽滑动配合的滑块。
11.进一步地,所述支撑座外周靠近底部的位置设置有向外凸出的限位翻边,限位翻边上设置有上下连通的螺纹孔,螺纹孔内设置有与其螺纹配合的紧固螺栓,所述支撑座通
过紧固螺栓顶紧固定在底座上。
12.进一步地,所述送粉器为双桶送粉器。
13.进一步地,所述主动旋转卡盘、从动旋转卡盘以及翻转卡盘均为手动卡盘。
14.与现有技术相比,本发明的有益之处是:这种机器人熔覆焊接装置可以使机器人与外部工作台之间联动运行,实现复杂轨迹的运动方式,可以进行高速激光熔覆焊接以及实现特殊空间形状的成型,使材料可以完美过渡转换,操作灵活,加工效率高。
附图说明
15.下面结合附图对本发明进一步说明。
16.图1和图2是本发明一种机器人熔覆焊接装置立体结构示意图;图3是本发明一种机器人熔覆焊接装置中翻转工作台结构示意图;图4是本发明一种机器人熔覆焊接装置中轴杆结构示意图;图5是本发明一种机器人熔覆焊接装置中车床尾座结构示意图。
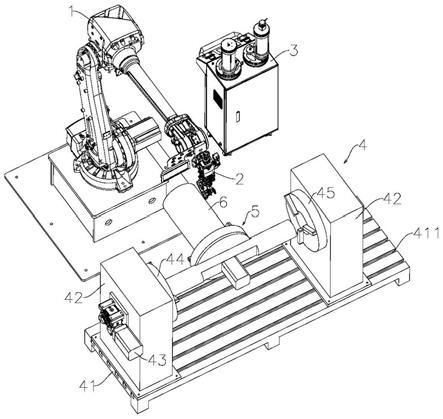
17.图中:1、abb机器人;2、熔覆头;3、送粉器;4、旋转工作台;41、底座;411、滑槽;42、支撑座;43、旋转电机;44、主动旋转卡盘;45、从动旋转卡盘;5、翻转工作台;51、轴杆;511、电机安装部;5111、电机安装腔;512、卡盘安装部;52、翻转电机;53、固定座;54、翻转卡盘;6、工件;7、车床尾座。
具体实施方式
18.下面结合附图及具体实施方式对本发明进行详细描述:图1和图2所示一种机器人熔覆焊接装置,具有abb机器人1和固定安装在abb机器人1上的熔覆头2,所述abb机器人1一侧设置有用于向熔覆头2送料的送粉器3,送粉器3与熔覆头2之间通过气管连接,实现送料;所述abb机器人1正面设置有旋转工作台4,旋转工作台4与所述abb机器人1之间具有间距;所述旋转工作台4包括底座41,底座41顶部设置有两个左右对称的支撑座42,左右两个支撑座42的对称面上分别设置有主动旋转卡盘44和从动旋转卡盘45,主动旋转卡盘44和从动旋转卡盘45左右对称且均通过轴承活动连接在对应的支撑座42上,底座41顶部位于左侧的支撑座42上固定设置有旋转电机43,所述旋转电机43与所述主动旋转卡盘44传动连接。
19.如图3所示,为了实现多轨迹联动运动,所述主动旋转卡盘44和从动旋转卡盘45之间卡接有翻转工作台5,所述翻转工作台5包括柱状结构的轴杆51,所述轴杆51的左右两端分别卡接在主动旋转卡盘44和从动旋转卡盘45上,所述轴杆51正面中心固定设置有翻转电机52,背面中心设置有与所述翻转电机52传动连接的翻转卡盘54,所述翻转卡盘54与所述abb机器人1前后对应。
20.为了方便翻转电机52和翻转卡盘54的安装及连接,如图4所示,所述轴杆51正面中心设置有上下齐平的电机安装部511,电机安装部511的中心设置有开口向外的电机安装腔5111,电机安装腔5111底部中心设置有前后连通的轴接孔,所述翻转电机52通过螺栓固定安装在电机安装腔5111内,翻转电机52的传动轴穿过轴接孔与所述翻转卡盘54固定连接在一起;所述轴杆51的背面中心设置有上下齐平的卡盘安装部512,所述卡盘安装部512内通过螺栓固定连接有固定座53,所述翻转卡盘54设置在固定座53的端面外侧,固定座53的端
面中心设置有方便传动轴与翻转卡盘54连接的衔接孔。
21.为了便于翻转电机52与翻转卡盘54传动,所述传动轴与轴接孔和衔接孔之间通过轴承活动连接。
22.为了方便将安装在翻转卡盘54上的工件在高速旋转时保证轴心的稳定性,如图5所示,所述abb机器人1与旋转工作台4之间的间距内设置有车床尾座7。
23.为了方便调节两个支撑座42之间的间距,所述底座41顶面设置有横向设置且左右连通的倒“t”型滑槽411,所述滑槽411具有多条,前后等间距并列设置,所述支撑座42底部设置有与所述滑槽411滑动配合的滑块。
24.为了方便支撑座42固定在底座41上,所述支撑座42外周靠近底部的位置设置有向外凸出的限位翻边,限位翻边上设置有上下连通的螺纹孔,螺纹孔内设置有与其螺纹配合的紧固螺栓,所述支撑座42通过紧固螺栓顶紧固定在底座41上。
25.为了保证送粉的稳定性,保证熔覆效果,所述送粉器3为双桶送粉器。
26.为了方便拆装,所述主动旋转卡盘44、从动旋转卡盘45以及翻转卡盘54均为手动卡盘。
27.使用时,调节左右两个支撑座42之间的间距,将工件6装夹在左右对称的主动旋转卡盘44和从动旋转卡盘45上,通过旋转电机43驱动主动旋转卡盘44转动并带动工件6和从动旋转卡盘45同步转动,配合abb机器人1通过熔覆头2根据设定的轨迹对工件6进行激光熔覆焊接;对于特殊轨迹熔覆焊接时,将翻转工作台5卡接固定在左右对称的主动旋转卡盘44和从动旋转卡盘45之间,将工件6装夹在翻转卡盘54上,通过翻转电机52驱动翻转卡盘54转动,翻转卡盘54带动工件6同步转动,配合abb机器人1通过熔覆头2根据设定的轨迹对工件6进行激光熔覆焊接;所述熔覆头2可以配置10000w的光纤激光器,可实现高速熔覆焊接,高速熔覆焊接时,翻转卡盘54上的工件6需要通过车床尾座7对其后端进行轴向定位,防止工件6转动时偏心跳动,保证稳定性。
28.这种机器人熔覆焊接装置可以使机器人与外部工作台之间联动运行,实现复杂轨迹的运动方式,可以进行高速激光熔覆焊接以及实现特殊空间形状的成型,使材料可以完美过渡转换,操作灵活,加工效率高。
29.需要强调的是:以上仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1