真空门结构及真空设备的制作方法
1.本技术涉及真空设备技术领域,特别是一种真空门结构及真空设备。
背景技术:
2.真空腔室是镀膜机、刻蚀机等真空设备必须的主体结构,真空腔室由多个壁面的真空腔体和门结构构成一个密封体,门结构与真空腔体通过密封圈进行密封。
3.传统的真空腔室的门结构是采用合页连接翻转的方式,在使用时,通常是操作者先将门解锁,然后由手动打开;关闭时,先关闭门体,然后用气缸拉紧或推动卡扣卡紧,或人工操作卡扣卡紧。
4.由于真空腔室的门板通常都非常重,一般都有几十公斤以上,而真空腔室也经常需要进行上下料或者清洁作业,在此过程中,操作者需要对门结构打开和关闭的操作变得非常复杂,而且也不利于自动上下料和设备使用自动化。
技术实现要素:
5.基于此,有必要针对上述门结构打开和关闭的操作复杂的技术问题,提供一种真空门结构及真空设备。
6.一种真空门结构,包括:直线运动机构、门板以及连接板;其中,所述直线运动机构安装在真空腔体前板的两侧,所述连接板安装在所述直线运动机构之间;
7.所述门板上安装有支撑结构,门板通过支撑结构与连接板联动,由所述直线运动机构带动上下运动;所述门板两侧安装有导向轴承,所述导向轴承在所述真空腔体前板进行上下滑行;
8.所述真空腔体前板在关闭位置设有轴承避位槽,连接板上安装有推进机构;所述导向轴承滑行至在所述轴承避位槽时,由所述推进机构将门板向真空腔体前板的密封圈压紧。
9.在一个实施例中,所述支撑结构包括安装在门板上的支撑轴承,门板通过支撑轴承与连接板联动,由所述直线运动机构带动上下运动。
10.在一个实施例中,在关门动作中,所述门板向上运动到关闭位置时,所述导向轴承运动到真空腔体前板的轴承避位槽位置,所述推进机构输出作用力给门板将导向轴承压入轴承避位槽内悬空,并将门板压在真空腔体前板上。
11.在一个实施例中,在开门动作中,门板向下运动,连接板带动所述导向轴承脱离所述轴承避位槽,门板与所述真空腔体前板的密封圈脱离;所述导向轴承在真空腔体前板向下运动,门板通过支撑轴承与连接板联动运动到底部设定位置。
12.在一个实施例中,所述推进机构包括预压弹簧;其中,所述导向轴承在真空腔体前板上滑动时,预压弹簧处于深度压缩状态,将所述门板向真空腔体前板压紧,使得导向轴承与真空腔体前板保持接触;所述导向轴承运动到轴承避位槽位置,所述预压弹簧处于预压状态,导向轴承压入轴承避位槽内悬空,预压弹簧将门板压在真空腔体前板上。
13.在一个实施例中,所述推进机构包括气缸推进机构或电机推进机构。
14.在一个实施例中,所述直线运动机构包括双滑台模组;
15.所述双滑台模组包括分别安装在真空腔体前板两侧的滑台模组;所述连接板的两端分别安装在两个滑台模组的滑块上;每个滑台模组对应一个驱动电机,驱动滑块上下运动。
16.在一个实施例中,所述直线运动机构包括双直线导轨,一个驱动电机及丝杆结构;
17.所述双直线导轨包括分别安装在真空腔体前板两侧的直线导轨,所述连接板的两端分别安装在两个直线导轨的滑块上;
18.所述驱动电机安装在门板中部位置,通过所述丝杆结构驱动所述连接板上下运动。
19.在一个实施例中,所述直线运动机构包括一个滑台模组和一个直线导轨;
20.所述滑台模组和直线导轨分别安装在真空腔体前板两侧,所述连接板分别安装在所述滑台模组的滑块和直线导轨的滑块上;所述滑台模组对应一个驱动电机,驱动滑台模组的滑块上下运动。
21.一种真空设备,包括:真空腔室以及上述的真空门结构。
22.本技术的技术方案具有如下有益效果:
23.利用直线运动机构、门板以及连接板结合的结构,在门板上安装支撑结构,门板通过支撑结构与连接板联动,并由直线运动机构带动上下运动,门板两侧安装导向轴承,导向轴承在真空腔体前板进行上下滑行,在真空腔体前板在关闭位置设置轴承避位槽,并连接板上安装推进机构,导向轴承滑行至在轴承避位槽时,由推进机构将门板向真空腔体前板的密封圈压紧,实现门板的打开和关闭;该技术方案,实现了自动化打开和关闭真空腔室的门板,降低了操作者手工开启或关闭真空门的复杂性,同时为实现自动化上下料提供有效通道,并且结合上下游工艺,可以实现物料的自动周转,提高制造过程的自动化程度。
附图说明
24.图1是真空门结构安装示意图;
25.图2是一个实施例的真空门结构示意图;
26.图3是真空门结构关闭状态下的俯视图;
27.图4和5是真空门结构关闭状态下的剖面视图;
28.图6是一个实施例的直线运动机构结构示意图;
29.图7是另一个实施例的直线运动机构结构示意图;
30.图8是又一个实施例的直线运动机构结构示意图。
具体实施方式
31.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
32.本技术实施例的术语“包括”以及其他任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤的过程、方法、系统、产品或设备没有限定于已列出的步骤或模块,而
是可选地还包括没有列出的步骤或模块,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或模块。
33.参考图1,图1是真空门结构安装示意图,如图中所示,在真空腔体的真空腔体前板40上,通过自动化运行的真空门结构,真空腔室的门板20可以上下滑动来完成打开或关闭。
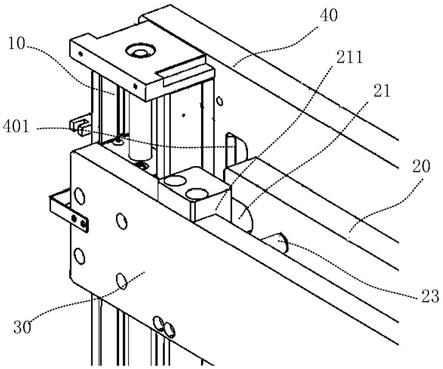
34.参考图2,图2是一个实施例的真空门结构示意图,图2为图1的虚线圈部分处于关闭状态下的放大图,该真空门结构包括:直线运动机构10、门板20以及连接板30;其中,直线运动机构10安装真空腔体前板40的两侧,连接板30安装在直线运动机构10之间。
35.门板20上安装有支撑结构21,门板20通过支撑结构21与连接板30联动,由直线运动机构10带动上下运动;门板20两侧安装有导向轴承22,导向轴承22在所述真空腔体前板40进行上下滑行。真空腔体前板40在关闭位置设有轴承避位槽401,连接板30上安装有推进机构23;导向轴承22滑行至在轴承避位槽401时,由推进机构23将门板20向真空腔体前板40的密封圈402压紧。
36.在一个实施例中,对于本技术的支撑结构21,可以包括安装在门板20上的支撑轴承211,门板20通过支撑轴承211与连接板30联动,由直线运动机构10带动上下运动。
37.基于上述实施例的真空门结构,其在关门和开门中操作可以如下:
38.在关门动作中:门板20向上运动到关闭位置时,导向轴承22运动到真空腔体前板40的轴承避位槽401位置,推进机构23输出作用力给门板20将导向轴承22压入轴承避位槽401内悬空,并将门板20压在真空腔体前板40上。
39.在开门动作中:门板20向下运动,连接板30带动导向轴承22脱离轴承避位槽401,门板20与真空腔体前板40的密封圈402脱离;导向轴承22在真空腔体前板40向下运动,门板20通过支撑轴承211与连接板30联动运动到底部设定位置。
40.具体的,本技术的真空门结构工作中主要包括以下几种状态:在关闭位置处,利用轴承避位槽401(u型设计)使得导向轴承22悬空,支撑轴承211使得门板20可以向真空腔体前板40方向运动的能力,推进机构23可以将门板20压紧在密封圈402上,使得门板20与密封圈402紧密接触,达到密封状态;参考图3
‑
5,图3是真空门结构关闭状态下的俯视图;图4和5是真空门结构关闭状态下的剖面视图。
41.滑行状态下,导向轴承22在真空腔体前板40上滑行,可以从关闭位置滑行至打开位置;在滑行过程中,导向轴承22脱离轴承避位槽401,门板20与真空腔体前板40的密封圈402分离,并且在整个滑行过程中,由于导向轴承22与真空腔室的作用,始终保持分离状态,从而可以避免门板20与密封圈402之间摩擦。
42.在一个实施例中,对于推进机构23,可以包括预压弹簧231,导向轴承22在真空腔体前板40上滑动时,预压弹簧231处于深度压缩状态,将门板20向真空腔体前板40压紧,使得导向轴承22与真空腔体前板40保持接触;导向轴承22运动到轴承避位槽401位置时,预压弹簧231处于预压状态,导向轴承22压入轴承避位槽401内悬空,预压弹簧231将门板20压在真空腔体前板40上。
43.上述实施例,通过预压弹簧可以以更低成本实现推进结构功能。
44.另外,推进机构23也可以采用气缸推进机构23或电机推进机构23等;在实际使用中,本专利使用者可以根据需求进行选择,在此不做限定。
45.本实施例的技术方案,实现了自动化打开和关闭真空腔室的门板,降低了操作者
手工开启或关闭真空门的复杂性,同时为实现自动化上下料提供有效通道,并且结合上下游工艺,可以实现物料的自动周转,提高制造过程的自动化程度。
46.在一个实施例中,参考图6,图6是一个实施例的直线运动机构结构示意图,上图是打开状态下的示意图,下图是关闭状态下的示意图。直线运动机构10包括双滑台模组;其中,双滑台模组包括分别安装在真空腔体前板40左侧的滑台模组110a和右侧的滑台模组110b;连接板30的两端分别安装在滑台模组110a和滑台模组110b的滑块上;滑台模组110a和滑台模组110b分别对应左侧的驱动电机111a和右侧的驱动电机111b,驱动滑块上下运动。
47.上述实施例的方案,一般是针对于门板重量较大时的设计方案,通过双滑台模组和双电机驱动。
48.在一个实施例中,参考图7,图7是另一个实施例的直线运动机构结构示意图,上图是打开状态下的示意图,下图是关闭状态下的示意图。直线运动机构10也可以包括双直线导轨,一个驱动电机121及丝杆结构122;其中,双直线导轨包括分别安装在真空腔体前板40左侧的直线导轨120a和右侧的直线导轨120b,连接板30的两端分别安装在两个直线导轨120a和120b的滑块上;驱动电机121安装在门板20中部位置,通过丝杆结构122驱动连接板30上下运动。
49.在一个实施例中,参考图8,图8是又一个实施例的直线运动机构10结构示意图,上图是打开状态下的示意图,下图是关闭状态下的示意图。直线运动机构10还可以包括一个滑台模组110和一个直线导轨120;其中,滑台模组110和直线导轨120分别安装在真空腔体前板40两侧,连接板30分别安装在滑台模组110的滑块和直线导轨120的滑块上;滑台模组110对应一个驱动电机111,驱动滑台模组110的滑块上下运动。
50.以上是本技术提供的直线运动机构10几种实现形式,实际使用中可以根据本专利使用者进行选择,在此不做限定。
51.下面阐述真空设备的实施例。
52.本技术的真空设备,可以包括:真空腔室以及上述实施例的真空门结构。本技术的真空设备,实现了自动化打开和关闭真空腔室的门结构,避免操作者人为开启或关闭真空门,同时为实现自动上下料提供有效通道,并且结合上下游工艺,可以实现物料的自动周转,提高制造过程的自动化程度。
53.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1