一种全自动液压自定心中心架的制作方法
1.本实用新型涉及液压自定心技术领域,具体为一种全自动液压自定心中心架。
背景技术:
2.在车床上加工长的工件一般需要用中心架支撑工件的前端,现有的中心架需要人工调整夹头以保证工件外圆的中心线与车床切削轴线重合,称为定中心。传统中心架一般是两点或者三点支撑,通过手动人工调节各个支撑杆,从而达到和主轴同心的目的,调节的精度往往取决于技术工人的手感。这种定心调节方式并不可靠,并且精度和效率较低,不能满足数控机床加工对高精度和高效率的要求,自动化程度低,影响生产工作的进度。
技术实现要素:
3.本实用新型的目的在于提供一种全自动液压自定心中心架,以解决上述背景技术中提出的问题。
4.为实现上述目的,一种全自动液压自定心中心架,包括框架组件、驱动机构和夹臂机构,所述夹臂机构通过所述驱动机构活动安装在所述框架组件上;
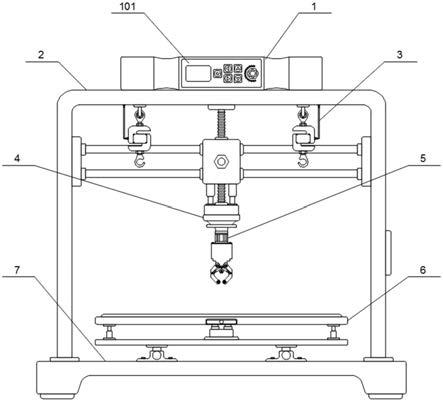
5.所述框架组件包括龙门架,所述龙门架的顶部和一侧面分别安装有中心控制箱和控制器,且所述龙门架的内部上端通过固定底座固定安装有滑杆,所述驱动机构贯穿所述滑杆活动安装在所述龙门架上,所述驱动机构包括螺纹伸缩杆、滑动块和液压杆,所述螺纹伸缩杆的顶端贯穿所述龙门架连接至所述中心控制箱,且所述螺纹伸缩杆通过固定盘活动安装在所述龙门架顶部内侧面,所述螺纹伸缩杆的底端穿过所述滑动块连接有固定轴,且所述液压杆活动连接在所述滑动块和固定轴之间,所述夹臂机构通过所述固定轴固定在所述驱动机构的底端,所述夹臂机构包括液压缸和壳体,所述液压缸固定在所述壳体的顶端,且所述液压缸底部通过活塞杆穿过所述壳体内部设有的活动腔连接有中臂,且所述中臂的顶端延伸出所述壳体的底端外部,并活动连接有摆臂,所述摆臂具有两幅,对称安装在所述壳体的底端。
6.优选的,两幅所述摆臂的一端分别通过转轴转动安装在所述壳体的底端,且两幅所述摆臂的另一端均通过轴承销转动安装有滚动轴承,所述轴承销和所述滚动轴承分别具有多组,所述中臂的一端通过连接轴固定连接至所述活塞杆,且所述中臂的另一端通过所述轴承销转动安装有所述滚动轴承。
7.优选的,两幅所述摆臂的上端和中端分别设有第一限位凸起和第二限位凸起,所述中臂的下端设有中心转轴,两幅所述摆臂分别通过所述第一限位凸起、第二限位凸起与所述中臂的中心转轴活动卡接有第一联动板、第二联动板,且所述第一联动板和第二联动板上分别开设有第一限位滑槽和第二限位滑槽,所述第一限位滑槽、第二限位滑槽分别与所述第一限位凸起、第二限位凸起滑动卡接。
8.优选的,所述液压杆具有多副,均匀分布在所述滑动块和固定轴之间,所述滑动块的两侧分别对称设置有防护垫圈,且所述滑动块通过所述防护垫圈贯穿所述滑杆,所述固
定轴的底部与所述液压缸固定连接。
9.优选的,所述框架组件的上端位于所述驱动机构的两侧对称设置有调节机构,且所述调节机构具有两幅,所述调节机构包括安装扣环、钢丝绳和调节块,所述安装扣环固定安装在所述龙门架的上端内侧面,且所述安装扣环通过吊环与所述调节块固定连接,所述钢丝绳的一端贯穿所述龙门架连接至所述中心控制箱,所述钢丝绳的另一端连接至所述调节块,且所述钢丝绳的两端均固定有调节固定件,且所述调节块的底端固定连接有吊钩。
10.优选的,所述中心控制箱和控制器上分别安装有第一控制面板和第二控制面板,且所述中心控制箱与所述控制器电性相连接。
11.优选的,所述龙门架的底部通过安装座固定连接有底座组件,所述底座组件包括承重底座,所述承重底座上端面安装有气动机构,所述承重底座的底端四角分别固定有稳固支脚,且各所述稳固支脚的底端均贴附有缓冲垫。
12.优选的,所述气动机构包括操作平台和连接板,所述操作平台和连接板之间固定有承重柱和减震柱,且所述减震柱具有多个,对称分布在所述承重柱的两侧,且所述操作平台的顶面贴附有防滑垫,所述连接板的底面通过气动滑块滑动安装有气动滑杆,且所述气动滑杆的两端均通过加固连接座固定在所述承重底座上,且所述气动滑杆的一端连接有气动缸。
13.与现有技术相比,本实用新型的有益效果是:
14.1、本实用新型一种全自动液压自定心中心架,
15.2、本实用新型一种全自动液压自定心中心架,
16.3、本实用新型一种全自动液压自定心中心架,
附图说明
17.图1为本实用新型一种全自动液压自定心中心架正视图;
18.图2为本实用新型一种全自动液压自定心中心架侧视图;
19.图3为本实用新型一种全自动液压自定心中心架框架组件、气动机构和底座组件正视图;
20.图4为本实用新型一种全自动液压自定心中心架调节机构正视图;
21.图5为本实用新型一种全自动液压自定心中心架连接机构正视图;
22.图6为本实用新型一种全自动液压自定心中心架夹臂机构正视图;
23.图7为本实用新型一种全自动液压自定心中心架夹臂机构透视图。
24.图中:
25.1、中心控制箱;101、第一控制面板;2、框架组件;201、龙门架;202、控制器;203、第二控制面板;204、固定底座;205、安装座;206、滑杆;3、调节机构;301、安装扣环;302、吊环;303、钢丝绳;304、调节固定件;305、调节块;306、吊钩;4、驱动机构;401、固定盘;402、螺纹伸缩杆;403、防护垫圈;404、滑动块;405、液压杆;406、固定轴;5、夹臂机构;501、液压缸;502、壳体;503、摆臂;504、第一限位凸起;505、第二限位滑槽;506、第一联动板;507、第二限位凸起;508、转轴;509、第二联动板;5010、中心转轴;5011、第一限位滑槽;5012、轴承销;5013、滚动轴承;5014、活塞杆;5015、连接轴;5016、活动腔;5017、中臂;6、气动机构;601、防滑垫;602、操作平台;603、承重柱;604、减震柱;605、连接板;606、气动滑块;607、气动滑杆;
608、加固连接座;609、气动缸;7、底座组件;701、稳固支脚;702、承重底座;703、缓冲垫。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.请参阅图1
‑
7,图为本实用新型中一优选实施方式,一种全自动液压自定心中心架,包括框架组件2、驱动机构4和夹臂机构5,夹臂机构5通过驱动机构4活动安装在框架组件2上;
28.框架组件2包括龙门架201,龙门架201的顶部和一侧面分别安装有中心控制箱1和控制器202,且龙门架201的内部上端通过固定底座204固定安装有滑杆206,驱动机构4贯穿滑杆206活动安装在龙门架201上,驱动机构4包括螺纹伸缩杆402、滑动块404和液压杆405,螺纹伸缩杆402的顶端贯穿龙门架201连接至中心控制箱1,且螺纹伸缩杆402通过固定盘401活动安装在龙门架201顶部内侧面,螺纹伸缩杆402的底端穿过滑动块404连接有固定轴406,且液压杆405活动连接在滑动块404和固定轴406之间,夹臂机构5通过固定轴406固定在驱动机构4的底端,夹臂机构5包括液压缸501和壳体502,液压缸501固定在壳体502的顶端,且液压缸501底部通过活塞杆5014穿过壳体502内部设有的活动腔5016连接有中臂5017,且中臂5017的顶端延伸出壳体502的底端外部,并活动连接有摆臂503,摆臂503具有两幅,对称安装在壳体502的底端。
29.两幅摆臂503的一端分别通过转轴508转动安装在壳体502的底端,且两幅摆臂503的另一端均通过轴承销5012转动安装有滚动轴承5013,轴承销5012和滚动轴承5013分别具有多组,中臂5017的一端通过连接轴5015固定连接至活塞杆5014,且中臂5017的另一端通过轴承销5012转动安装有滚动轴承5013,通过两幅对称夹设的摆臂503和中部设有的中臂5017形成三角稳定结构,并在各端部转动安装有滚动轴承5013,转动不同角度夹取工件,避免划伤磨损;两幅摆臂503的上端和中端分别设有第一限位凸起504和第二限位凸起507,中臂5017的下端设有中心转轴5010,两幅摆臂503分别通过第一限位凸起504、第二限位凸起507与中臂5017的中心转轴5010活动卡接有第一联动板506、第二联动板509,且第一联动板506和第二联动板509上分别开设有第一限位滑槽5011和第二限位滑槽505,第一限位滑槽5011、第二限位滑槽505分别与第一限位凸起504、第二限位凸起507滑动卡接,进一步加固两幅摆臂503与中臂5017之间的结构稳定性和相对移动灵活性,防止意外脱落发生事故;液压杆405具有多副,均匀分布在滑动块404和固定轴406之间,滑动块404的两侧分别对称设置有防护垫圈403,且滑动块404通过防护垫圈403贯穿滑杆206,固定轴406的底部与液压缸501固定连接,一方面,滑杆206为上下移动的驱动机构4提供平稳保障,使得螺纹伸缩杆402上下移动时,滑动块404产生相对摩擦力沿着左右贯穿设置的滑杆206抵消掉,螺纹伸缩杆402和液压杆405上下伸缩,驱动固定轴406,从而带动液压缸501上下移动;框架组件2的上端位于驱动机构4的两侧对称设置有调节机构3,且调节机构3具有两幅,调节机构3包括安装扣环301、钢丝绳303和调节块305,安装扣环301固定安装在龙门架201的上端内侧面,且安装扣环301通过吊环302与调节块305固定连接,钢丝绳303的一端贯穿龙门架201连接至
中心控制箱1,钢丝绳303的另一端连接至调节块305,且钢丝绳303的两端均固定有调节固定件304,且调节块305的底端固定连接有吊钩306,工作人员通过中心控制箱1上的第一控制面板101输出指令,控制钢丝绳303的张力,使得调节块305带动底部吊钩306上下移动,对待加工的工件进一步限位固定,便于生产的进行;中心控制箱1和控制器202上分别安装有第一控制面板101和第二控制面板203,且中心控制箱1与控制器202电性相连接,中心控制箱1和控制器202相互之间可以通过电信号而互相控制指令,为工作人员提供多个智能操作界面,控制设备的加工工序,大大提高自动化程度和加工效率;龙门架201的底部通过安装座205固定连接有底座组件7,底座组件7包括承重底座702,承重底座702上端面安装有气动机构6,承重底座702的底端四角分别固定有稳固支脚701,且各稳固支脚701的底端均贴附有缓冲垫703,有助于提高该设备的稳定性;气动机构6包括操作平台602和连接板605,操作平台602和连接板605之间固定有承重柱603和减震柱604,且减震柱604具有多个,对称分布在承重柱603的两侧,且操作平台602的顶面贴附有防滑垫601,连接板605的底面通过气动滑块606滑动安装有气动滑杆607,且气动滑杆607的两端均通过加固连接座608固定在承重底座702上,且气动滑杆607的一端连接有气动缸609,通过气动缸609驱动气动滑块606沿着气动滑杆607带动连接板605前后移动,使得放置在操作平台602上的待加工工件无需工人操作,即可实现自动化程度较高的自主移动和重复夹持操作。
30.本实用新型的工作流程及其原理,通过中心控制箱1和控制器202多个智能操作平台实现对该装置的自动化智能操作,螺纹伸缩杆402和液压杆405在滑动块404的限位下,通过中心控制箱1的指令控制而上下伸缩移动,驱动夹臂机构5相对于龙门架的高度调节,液压缸501驱动活塞杆5014,并在连接轴5015的作用下带动中臂5017沿着活动腔5016而上下移动,摆臂503具有两幅,对称安装在壳体502的底端,在第一联动板506和第二联动板509的作用下,中臂5017的伸缩分别带动摆臂503的开合,对待加工工件进行夹持移动,同时通过气动缸609驱动气动滑块606,气动滑块606沿着气动滑杆607带动连接板605前后移动,使得放置在操作平台602上的待加工工件无需工人操作,即可实现自主移动和位置调节,便于定位操作,相互配合使用,大大提高自动化程度和生产效率。
31.以上内容是结合具体实施方式对本实用新型作进一步详细说明,不能认定本实用新型具体实施只局限于这些说明,对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型的构思的前提下,还可以做出若干简单的推演或替换,都应当视为属于本实用新型所提交的权利要求书确定的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1