一种全流程无人化智能扒渣系统的制作方法
1.本技术涉及炼钢领域,具体而言,涉及一种全流程无人化智能扒渣系统。
背景技术:
2.在炼钢生产过程中,由高炉来的铁水往往带有1%以上的高炉渣,高炉渣的扒除能够降低转炉石灰消耗等从而改善了转炉炼钢生产,对于脱硫的铁水中高硫渣的扒除也是炼钢工艺的必要工序。当前,铁水扒渣工艺已经从最初为满足冶炼低硫或极低硫钢种的需求,发展成为炼铁-炼钢-连铸过程中不可分割的重要环节,也是建立起高效低成本的洁净生产工艺平台、增强产品竞争力、加快大型转炉节奏和提高生产效率的必备手段之一。
3.最初的铁水扒渣均是采用人力扒渣,后逐渐发展成采用人力通过辅助机械进行扒渣。随着冶炼设备能力逐渐增大和铁水罐容积增大,渣量也越来越大,需要扒渣的工艺要求日渐增多,人们设计了专用扒渣设备-扒渣机。一般扒渣机的动作由三组主要动作配合完成扒渣,前后行走完成扒渣功能,打下抬起与行走配合完成带渣功能,左右摆动与行走配合完成容器周边渣的扒除功能。但目前现有的扒渣作业还存在如下问题:一是扒渣效果无法有效评估,导致扒渣铁损过大;二是扒渣全过程涉及铁水罐车行走、倾翻、吹气赶渣枪伸缩、扒渣等多个复杂工序,目前主要依靠人工进行操作,人工劳动强度大。
技术实现要素:
4.本技术的目的在于提供一种全流程无人化智能扒渣系统,其能够识别铁水罐内的铁渣高度和情况并进行无人化扒渣作业。
5.本技术的实施例是这样实现的:
6.本技术实施例提供一种全流程无人化智能扒渣系统,其包括可沿第一直线方向在初始工位和扒渣工位移动的铁水罐车、可沿第二直线方向朝靠近或远离铁水罐车移动的渣车及可伸缩的扒渣杆,铁水罐车上设有可沿竖直平面转动的铁水罐及用于驱动铁水罐沿竖直平面转动的转动机构,渣车上设有渣罐,扒渣杆伸缩时将沿竖直平面转动的扒渣位置的铁水罐内炉渣扒出至渣罐内,铁水罐车位于扒渣工位时的上方设有用于向铁水罐内吹气聚渣的吹气赶渣枪、用于驱动吹气赶渣枪伸缩的伸缩油缸、用于驱动伸缩油缸旋转的驱动电机、用于监控铁水罐内炉渣情况的摄像头及用于检测铁水罐内炉渣高度的第一距离传感器。
7.在一些可选的实施方案中,铁水罐车包括两个车体、车体可移动地设于沿第一直线方向延伸的第一轨道上,转动机构包括中部与铁水罐连接的鞍座、两个分别支撑并卡接鞍座两端的l形的旋转架及两个转动油缸,两个转动油缸的一端分别与两个车体铰接,另一端分别与两个旋转架铰接,旋转架分别与对应的车体通过齿圈和齿条啮合。
8.在一些可选的实施方案中,旋转架上设有对铁水罐的旋转倾角进行测量的角度仪。
9.在一些可选的实施方案中,第一轨道的至少一端设有用于检测铁水罐车距离的第
二距离传感器。
10.在一些可选的实施方案中,第一轨道的两侧还分别设有用于检测铁水罐车位置的光电开关。
11.在一些可选的实施方案中,渣车可移动地设于沿第二直线方向延伸的第二轨道上,第二轨道上方还设有用于检测渣罐内炉渣高度的第三距离传感器。
12.在一些可选的实施方案中,渣车上还设有用于称量渣罐重量的称重仪。
13.本技术的有益效果是:本技术提供的全流程无人化智能扒渣系统包括可沿第一直线方向在初始工位和扒渣工位移动的铁水罐车、可沿第二直线方向朝靠近或远离铁水罐车移动的渣车及可伸缩的扒渣杆,铁水罐车上设有可沿竖直平面转动的铁水罐及用于驱动铁水罐沿竖直平面转动的转动机构,渣车上设有渣罐,扒渣杆伸缩时将沿竖直平面转动的扒渣位置的铁水罐内炉渣扒出至渣罐内,铁水罐车位于扒渣工位时的上方设有用于向铁水罐内吹气聚渣的吹气赶渣枪、用于驱动吹气赶渣枪伸缩的伸缩油缸、用于驱动伸缩油缸旋转的驱动电机、用于监控铁水罐内炉渣情况的摄像头及用于检测铁水罐内炉渣高度的第一距离传感器。本技术提供的全流程无人化智能扒渣系统能够识别铁水罐内的铁渣高度和情况,并自动控制进行扒渣过程的无人化作业。
附图说明
14.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
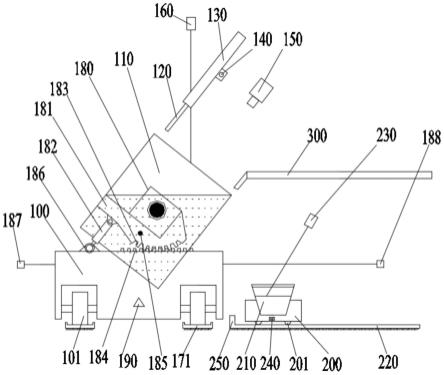
15.图1为本技术实施例提供的全流程无人化智能扒渣系统的第一视角的结构示意图;
16.图2为本技术实施例提供的全流程无人化智能扒渣系统的第二视角的结构示意图;
17.图3为本技术实施例提供的全流程无人化智能扒渣系统中使用第一距离传感器检测并计算铁渣液面距离铁水罐顶面的距离的结构示意图;
18.图4为本技术实施例提供的全流程无人化智能扒渣系统中采用摄像头对铁水罐的铁渣液面与铁水罐顶沿的距离进行测量的示意图。
19.图中:100、铁水罐车;101、车轮;110、铁水罐;120、吹气赶渣枪;130、伸缩油缸;140、驱动电机;150、摄像头;160、第一距离传感器;170、车体;171、第一轨道;180、鞍座;181、旋转架;182、转动油缸;183、齿圈;184、齿条;185、角度仪;186、固定座;187、红外线发射器;188、红外线接收器;190、第二距离传感器;200、渣车;201、渣车车轮;210、渣罐;220、第二轨道;230、第三距离传感器;240、称重仪;250、阻挡块;300、扒渣杆。
具体实施方式
20.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本技术实施
例的组件可以以各种不同的配置来布置和设计。
21.因此,以下对在附图中提供的本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
22.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
23.在本技术的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该申请产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
24.此外,术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
25.在本技术的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
26.在本技术中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
27.以下结合实施例对本技术的全流程无人化智能扒渣系统的特征和性能作进一步的详细描述。
28.如图1和图2所示,本技术实施例提供一种全流程无人化智能扒渣系统,其包括可沿第一轨道171在初始工位和扒渣工位移动的铁水罐车100、可沿第二轨道220移动的渣车200及可伸缩的扒渣杆300,第二轨道220垂直于第一轨道171,且第二轨道220一端位于第一轨道171的扒渣工位一侧,铁水罐车100包括两个可沿第一轨道171移动的车体170,每个车体170的底部均通过四个可旋转的车轮101与第一轨道171滚动配合,铁水罐车100连接有可沿竖直平面转动的铁水罐110及用于驱动铁水罐110沿竖直平面转动的转动机构,转动机构包括中部与铁水罐110连接的鞍座180、两个分别用于支撑并卡接鞍座180两端的l形的旋转架181及两个转动油缸182,两个转动油缸182的一端分别与两个车体170上的固定座186铰接,另一端分别与两个旋转架181铰接,旋转架181底部分别设有弧形的齿圈183,每个车体170的顶部均还有与对应旋转架181的齿圈183啮合的齿条184,旋转架181上设有对铁水罐
110的旋转倾角进行测量的角度仪185,扒渣工位的上方设有用于向铁水罐110内吹气聚渣的吹气赶渣枪120、用于驱动吹气赶渣枪120伸缩的伸缩油缸130、用于驱动伸缩油缸130旋转的驱动电机140、用于监控铁水罐110内炉渣情况的摄像头150及用于检测铁水罐110内炉渣高度的第一距离传感器160,第一轨道171的一端设有用于检测铁水罐车100距离的第二距离传感器190。
29.渣车200上设有渣罐210,渣车200的底部通过四个渣车车轮201滚动设于第二轨道220上,第二轨道220上方还设有用于检测渣罐210内炉渣高度的第三距离传感器230,扒渣杆300伸缩时将位于扒渣工位的沿竖直平面转动的铁水罐110内炉渣扒出至渣罐210内,渣车200上还设有用于称量渣罐210重量的称重仪240,第一轨道171和第二轨道220的两端分别设有阻挡块250。第一轨道171的两侧还分别设有用于检测铁水罐车100位置的红外线发射器187和红外线接收器188,当铁水罐车100沿第一轨道171移动至使铁水罐110位于第二轨道220一端时,红外线发射器187和红外线接收器188的连接位于铁水罐110的一侧边缘。
30.本技术实施例提供的全流程无人化智能扒渣系统的工作原理是:
31.铁水罐车100停止在初始工位,使用第二距离传感器190检测铁水罐车100在第一轨道171上的初始工位的距离,并记录为a0;
32.使用吊车将铁水罐110吊设至铁水罐车100上,并使铁水罐110连接的鞍座180两端分别落在铁水罐车100的l形旋转架181上,控制铁水罐车100沿第一轨道171移动至扒渣工位,并通过第二距离传感器190实时记录铁水罐车100的实时距离值a,当a=a1(a1为铁水罐车达到扒渣工位的实测值,也是系统设定值)或者红外线发射器187和红外线接收器188之间的信号发送被遮挡时,表明铁水罐车100已经移动至预设的扒渣工位;
33.如图3所示,当铁水罐车100在初始工位时,采用第一距离传感器160对地面距离进行测量,记为b1;当铁水罐车100移动至扒渣工位后,采用第一距离传感器160对铁水罐110内铁渣液面的距离进行测量,记为b0,铁水罐车100顶面距离地面的距离为恒定值b2,所以铁渣液面距离铁水罐顶面的距离b=b0-(b1-b2),此时根据得到的b的值自动计算铁水罐110的旋转倾角
ɑ
1;
34.控制两个车体170顶部铰接的转动油缸182启动,推动两个旋转架181旋转带动铁水罐110旋转,并由角度仪185实时测量铁水罐110的旋转角度
ɑ
,在铁水罐110旋转过程中通过l形的旋转架181的一端凸起对铁水罐110进行卡接和位置限定,如图4所示,同时在旋转的过程中,采用摄像头150实时对铁水罐110的铁渣液面与铁水罐110顶沿的距离进行测量,其值为c,当
ɑ
=
ɑ
1时或者c≤20mm时,转动油缸182停止伸缩,并记录下铁水罐110的角度
ɑ
2;
35.沿第二轨道220移动渣车200,将渣车200上渣罐210移动至铁水罐110的正下方,通过称重仪240记录下渣罐210的初始重量w1,并对渣罐210重量实时进行记录,记为w,并通过第三距离传感器230测量渣罐210中渣面高度l,初始值记为l1;
36.使用吹气赶渣枪120保持通气吹扫状态对铁水罐110内炉渣进行吹气聚集;利用驱动电机140将吹气赶渣枪120的角度调整到与罐沿内部平行,即角度也为
ɑ
2;然后利用伸缩油缸130驱动吹气赶渣枪120下降,当摄像头150检测到吹气赶渣枪120与铁水液面接触时,开始计时t,当t=t1时间后,吹气赶渣枪120停止插入,其中h为吹气赶渣枪120插入铁渣液面深度,取值为800mm-1500mm;v为吹气赶渣枪120的下降速度,
ɑ
2为铁水罐
110扒渣位的旋转倾角。
37.通过摄像头150对铁渣液面中渣面的分布情况进行分析,然后规划扒渣路径,控制扒渣杆300进行扒渣;
38.当判定渣面达到目标要求或者w≥w1+w2或者l≥l1+l2时,停止扒渣。式中w2为单罐铁水扒渣后理论渣重量,l2为单罐铁水扒渣后渣罐210内渣面理论上涨高度;当l≤l3+10mm或者w≥w3-1吨时,提示渣罐210已满,式中l3为渣罐210堆满时第三距离传感器230实测距离,w3为渣罐210装满时渣罐重量;
39.控制扒渣杆300和吹气赶渣枪120回到原位,然后在转动油缸182的作用下驱动铁水罐110恢复水平状态即初始角度,然后利用铁水罐车100将铁水罐110运送到铁水罐车100的初始位置,完成整个扒渣过程。
40.本技术实施例中,铁水罐车100沿第一轨道171移动、渣车200沿第二轨道220移动,既可以分别在第一轨道171和第二轨道220上设置牵引车辆牵引,也可以分别使用轮毂电机作为车轮101和渣车车轮201为铁水罐车100和渣车200提供动力。
41.本技术实施例提供的全流程无人化智能扒渣系统能够实现扒渣作业的自动化、无人化操作,且整体系统结构简单可靠。其中通过设置第二距离传感器190、红外线发射器187和红外线接收器188能够实时监控铁水罐车100的位置和精准定位,利用转动油缸182、旋转架181和车体170上对应啮合的齿圈183和齿条184配合,能够实现铁水罐110的支撑和自动稳定倾翻,并通过角度仪185实现了倾翻角度的精准测量;通过第一距离传感器160实现铁水罐110内铁渣液面的非接触精准测量,并计算实现铁水罐110倾动角度的自动设定;通过摄像头150实现铁渣界面的自动识别,并对扒渣杆300的路径实现了自动规划;通过摄像头150实时探测铁水罐110倾翻过程中铁渣液面与罐沿的距离,避免了铁水罐110倾翻过渡导致的铁水倾泻的事情发生,提高了系统安全性;通过第三距离传感器230实现了渣罐210渣面的实时监测,并通过单罐铁水扒渣前后渣面高度差避免了过渡扒渣的可能性,降低了扒渣铁损,同时通过渣面监测,实现了渣罐210满罐提醒,避免了铁渣溢出的情况发生。采用称重仪240对渣罐210重量进行测量并通过单罐铁水扒渣前后渣罐重量避免了过渡扒渣的可能性,降低了扒渣铁损。
42.在其他可选的实施例中,还可以设置竖直布置且油缸杆与扒渣杆300连接的竖向油缸及水平布置且油缸杆与竖向油缸连接的水平油缸,从而利用竖向油缸和水平油缸驱动可伸缩的扒渣杆300沿竖直方向和水平方向移动,从而扩大扒渣范围。
43.以上所描述的实施例是本技术一部分实施例,而不是全部的实施例。本技术的实施例的详细描述并非旨在限制要求保护的本技术的范围,而是仅仅表示本技术的选定实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1