双面研磨装置和双面研磨方法与流程
1.本公开涉及研磨技术领域,具体地,涉及双面研磨装置和利用该双面研磨装置进行的双面研磨方法。
背景技术:
2.随着半导体技术的发展,硅片的直径越来越大,而集成电路的特征尺寸越来越小。由此,对晶圆表面的平坦度及去除速率提出了更高的要求。双面研磨加工是加快厚度去除速率、提升晶圆表面平坦度最有效的技术手段之一。
3.对于双面研磨过程,在晶圆经研磨后的下料过程中,磨轮退出,晶圆被一侧静压板缓慢地真空吸附于其表面上,之后,容纳双面研磨装置的研磨室的门打开,机械臂进入研磨室,到达晶圆所在位置并吸取晶圆,随后,将晶圆从研磨室缓慢移出送入下一工序。
4.然而,在研磨过程中,不断产生的硅渣/磨粒碎屑及其他杂质会附着于两侧静压板,导致当晶圆被真空吸附于静压板时,晶圆的表面会产生大量深度印记甚至划痕,且后道工序无法去除,造成晶圆报废和成本增加。而且,为了解决上述问题而对静压板进行的频繁清洁及保养会造成大量时间浪费,且人工清洁对操作员的技术水准有较高要求,导致清洁效果无法保证,对后续产能提升造成严重制约。
技术实现要素:
5.本部分提供了本公开的总体概要,而不是对本公开的全部范围或所有特征的全面公开。
6.本公开的一个目的在于提供一种能够实现晶圆的直接向外移出以避免晶圆在移出过程中受到污染的双面研磨装置。
7.本公开的另一目的在于提供一种能够省去对静压板的频繁清洁及养护时间、避免人工清洁的不稳定性从而有效缩短晶圆移出时间的双面研磨装置。
8.为了实现上述目的中的一个或多个,根据本公开的一方面,提供了一种双面研磨装置,其可以包括:
9.承载结构,其用于承载要研磨的晶圆;
10.一对静压板,所述一对静压板分别设置在承载结构的两侧,以用于在研磨时通过流体静压以非接触的方式支撑晶圆;以及
11.一对磨轮,所述一对磨轮分别设置在承载结构的两侧,以用于对晶圆的相反两面进行研磨,
12.该双面研磨装置还可以包括:
13.驱动单元,其构造成用于在研磨完成后使晶圆向所述两侧中的一侧移动以从承载结构脱离;以及
14.传送单元,其构造成是可移动的以用于在研磨完成时移动至所述一侧以接纳从承载结构脱离的晶圆。
15.在上述双面研磨装置中,驱动单元可以为对应地设置在所述一对静压板的表面上的用于排出流体以提供流体静压的通孔,驱动单元构造成在研磨完成后位于所述两侧中的另一侧的静压板上的通孔进行喷气并且/或者位于所述一侧的静压板上的通孔进行吸真空,以使晶圆向所述一侧移动以从承载结构脱离。
16.在上述双面研磨装置中,传送单元可以包括:
17.主体支架;
18.接纳部分,其设置在主体支架的下部部分处以用于接纳晶圆的底部;以及
19.靠置部分,其设置在主体支架的上部部分处以用于供晶圆的上部靠置。
20.在上述双面研磨装置中,主体支架可以由高强度合金制成。
21.在上述双面研磨装置中,主体支架的高度可以大于晶圆的半径。
22.在上述双面研磨装置中,接纳部分可以为弧形斜凹槽,并且弧形斜凹槽的深度和倾斜度分别构造成使得晶圆的底部能够被稳定的接纳在弧形斜凹槽中以及使得晶圆能够倾斜成使其上部靠置在靠置部分上。
23.在上述双面研磨装置中,传送单元可以构造成能够移动至容纳双面研磨装置的研磨室外,以将接纳在传送单元中的晶圆传送到研磨室外。
24.在上述双面研磨装置中,通孔在每个静压板上均为多个通孔,其中,所述多个通孔中的一部分通孔布置在相应的静压板的靠近相应的磨轮的区域处,并且所述多个通孔中的其余通孔布置在相应的静压板的与承载在承载结构中的晶圆的上部对应的区域处,其中,通过由其余通孔产生的气流施加至晶圆的力大于通过由一部分通孔产生的气流施加至晶圆的力。
25.在上述双面研磨装置中,所述多个通孔为4个通孔,其中,所述一部分通孔为3个通孔并关于相应的静压板的竖向中心轴线对称地布置,并且所述其余通孔为1个通孔并布置在所述竖向中心轴线上。
26.根据本公开的另一方面,提供了一种双面研磨方法,其利用根据前述段落中的任一段落所述的双面研磨装置来进行。
27.根据本公开,通过提供传送单元代替静压板来接收研磨后的晶圆,可以避免晶圆在移出过程中受到研磨中产生的杂质的污染和损伤,从而提高了生产效率并节约了成本;而且,可以避免对静压板进行频繁清洁及保养,从而避免了人工清洁的不确定性、有效缩短了晶圆移出的时间,对产能提升产生积极作用。
28.通过以下结合附图对本公开的示例性实施方式的详细说明,本公开的上述特征和优点以及其他特征和优点将更加清楚。
附图说明
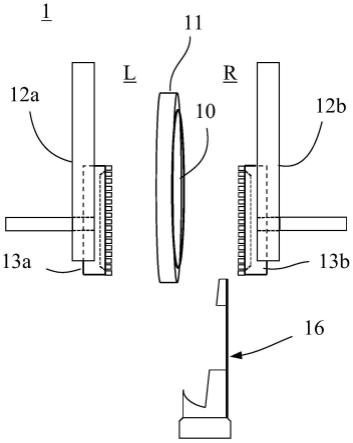
29.图1示意性地示出了根据本公开的实施方式的双面研磨装置;
30.图2至图4示意性地示出了根据本公开的实施方式的双面研磨装置的传送研磨后的晶圆的工作过程;
31.图5以正视图示出了根据本公开的实施方式的传送单元;
32.图6以侧视图示出了图5中的根据本公开的实施方式的传送单元;
33.图7示意性地示出了支架高度与晶圆半径的关系;以及
34.图8以正视图分立地示出了根据本公开的实施方式的一对静压板。
具体实施方式
35.下面参照附图、借助于示例性实施方式对本公开进行详细描述。要注意的是,对本公开的以下详细描述仅仅是出于说明目的,而绝不是对本公开的限制。此外,在各个附图中采用相同的附图标记来表示相同的部件。
36.在现有的双面研磨装置中,在研磨结束之后,装载在研磨载具上的晶圆会被一侧的静压板真空吸附,并随后由机械臂从该静压板处将晶圆移送入下一工序。然而,如前所述,在研磨过程中产生的硅渣/磨粒碎屑及其他杂质会附着于两侧静压板,因此,当晶圆被真空吸附于静压板时,晶圆表面就会产生大量印记甚至划痕,且后道工序无法去除,造成晶圆报废和成本增加。
37.在本公开中,通过提供额外的用于接收研磨后的晶圆的装置来代替附着有杂质的静压板,可以避免晶圆在移出过程中受到研磨中产生的杂质的污染和损伤,从而提高了生产效率并节约了成本;而且,可以避免对静压板进行频繁清洁及保养,从而避免了人工清洁的不确定性、有效缩短了晶圆移出的时间,对产能提升产生积极作用。
38.接下来,参照图1至图4,对根据本公开的实施方式的双面研磨装置进行详细说明。
39.根据本公开的实施方式,提出了一种双面研磨装置1,其包括:
40.承载结构11,其用于承载要研磨的晶圆10;
41.一对静压板12a、12b,所述一对静压板分别设置在承载结构11的两侧,以用于在研磨时通过流体静压以非接触的方式支撑晶圆10;以及
42.一对磨轮13a、13b,所述一对磨轮分别设置在承载结构11的两侧,以用于对晶圆10的相反两面进行研磨。
43.如图1中所示,承载结构11通常呈环形并且构造成沿径向方向从外周对晶圆10进行支撑。当进行研磨时,承载结构11会带动装载在其上的晶圆一起转动,以转动方式进给的一对磨轮会与转动的晶圆接触以对其相反两面进行研磨。
44.静压板12a、12b的表面上可以对应地设置有多个通孔,这些通孔构造成用于在晶圆被移入承载结构11中时向晶圆喷射流速相等的流体,例如气体,以通过流体静压以非接触的方式协同稳定晶圆的位置,而且在研磨过程中,始终保持该喷射以始终保持晶圆位置的稳定。
45.静压板12a、12b可以具有大致圆形的轮廓并在下部部分处具有呈大致圆形的贯通孔,例如呈大致圆形的磨轮13a、13b在要进行研磨时穿过贯通孔以转动方式向晶圆进给,以对晶圆进行研磨。
46.在本公开中,双面研磨装置1还包括驱动单元14(在图8中可以更清楚地观察到),其构造成用于在研磨完成后使晶圆10向其两侧中的一侧移动以从承载结构11脱离。
47.需要说明的是,所提到的晶圆10的两侧指的是装载在承载结构11上的晶圆10的靠近静压板12a的一侧或者说图1中的左侧l以及靠近静压板12b的一侧或者说图1中的右侧r。
48.可以理解的是,驱动单元14可以使晶圆10向左侧l移动,也可以使晶圆10向右侧r移动,只要能够满足晶圆10由此从承载结构11脱离即可。在本实施方式中,机械臂15可以从承载结构11的左侧l将晶圆10移入承载结构11中,并且驱动单元14使晶圆10向右侧r移动以
从承载结构11脱离。
49.根据本公开的实施方式,驱动单元14可以为对应地设置在一对静压板12a、12b的表面上的用于排出流体例如气体以提供上述流体静压的通孔,该驱动单元14构造成在研磨完成后位于左侧l的静压板12a上的通孔进行喷气并且/或者位于右侧r的静压板12b上的通孔进行吸真空,以使晶圆10向右侧r移动以从承载结构11脱离。
50.可以理解的是,通孔14即为上述在研磨过程中用于向晶圆10喷射流体以通过流体静压以非接触的方式支撑晶圆10的通孔,其在研磨完成后用作驱动单元来使晶圆10从承载结构11脱离。
51.需要注意的是,可以仅通过位于左侧l的静压板12a上的通孔进行喷气来使晶圆10向右侧r移动以从承载结构11脱离,也可以仅通过位于右侧r的静压板12b上的通孔进行吸真空来使晶圆10向右侧r移动以从承载结构11脱离,只要这种喷气或吸真空可以在晶圆表面产生足够的推力或吸力来使晶圆10能够从承载结构11脱离即可。优选地,可以通过上述这两者来使晶圆10向右侧r移动以从承载结构11脱离,通过这种方式,晶圆10可以在分别施加于相反两面的推力和吸力的共同作用下移动,由此可以增强对晶圆10移动的控制,使其可以更顺利地从承载结构11脱离。
52.同样可以理解的是,当晶圆10是通过向左侧l移动而从承载结构11脱离时,位于右侧r的静压板12b上的通孔进行喷气,而位于左侧l的静压板12a上的通孔进行吸真空。
53.可以设想的是,驱动单元14还可以以其他形式实现。例如,可以在晶圆的一侧表面例如左侧表面施加一定非接触式推力的其他类型的装置,或者是施加一定接触式推力的装置,而且可选地,这些装置对晶圆的表面基本不会造成污染或损伤。
54.根据本公开的实施方式,双面研磨装置1还包括传送单元16,其构造成是可移动的以用于在研磨完成时移动至晶圆10的一侧例如右侧r以接纳从承载结构11脱离的晶圆10。
55.具体而言,传送单元16在研磨加工完成后可以从例如位于承载结构11下方的待机位置升起,如图2中所示,并靠近晶圆10到达设定位置,如图3中所示。当研磨完成时,晶圆10通过驱动单元14向右侧移动以从承载结构11脱离,传送单元16的设定位置使得从承载结构11脱离的晶圆10可以可靠地直接倒在传送单元16上以被其接纳。
56.传送单元16可以在研磨加工完成后直接移动至设定位置。但是,也可以设想,在研磨加工完成后,右侧静压板12b首先向后移动,即向右侧移动,以使晶圆10与右侧静压板12b之间的距离增大,从而留出更大空间;之后传送单元16再移动至设定位置。以此方式,为传送单元16的移动提供了更充足的空间,避免了因空间不足导致的例如传送单元16无法移动至设定位置、晶圆10不易或无法被接纳在传送单元16中以及传送单元16与晶圆10或右侧静压板12b发生碰撞的风险。
57.接纳在传送单元16上的晶圆10可以通过例如机械臂15被送入下一工序。
58.可以设想的是,机械臂15可以直接移动到容纳双面研磨装置1的研磨室内,以例如通过其吸盘151从传送单元16吸取晶圆10并将晶圆10移出研磨室以送入下一工序。
59.参照图4,另外可以设想的是,传送单元16可以构造成能够移动至容纳双面研磨装置1的研磨室外,以将接纳在传送单元16中的晶圆10传送到研磨室外。在研磨室外,机械臂15可以通过吸盘151从传送单元16吸取晶圆10并将晶圆10送入下一工序。通过这种方式,可以使机械臂15对晶圆10的吸取在研磨室外进行,避免了因研磨室内空间不足导致机械臂15
可能无法顺利移动以吸取晶圆10的风险,并且避免了机械臂15因需移动到发生研磨加工的研磨室内而可能受到污染的风险。
60.在晶圆10传送结束之后,传送单元16向下移动以重新返回到待机位置以待下一次晶圆传送。
61.通过上述静压板和传送单元的协同作业,可以实现晶圆的直接向外移出,相比于晶圆被真空吸附于不洁净的静压板后才移出的情况,保证了晶圆的表面的清洁、降低了晶圆的报废几率并因此节约了生产成本。此外,由于不再依靠静压板真空吸附晶圆而是由传送单元16接收晶圆10,可以直接省去对静压板进行频繁清洁与养护的时间,避免了人工清洁的不确定性,有效缩短了总的晶圆加工时间,并由此对产能提升产生积极作用。
62.可以理解的是,传送单元16是清洁的,并且可以是易于清洁的,以确保在与晶圆10的接触中不对其产生污染。
63.参照图5和图6,根据本公开的实施方式,传送单元16包括:
64.主体支架16a;
65.接纳部分16b,其设置在主体支架16a的下部部分处以用于接纳晶圆10的底部;以及
66.靠置部分16c,其设置在主体支架16a的上部部分处以用于供晶圆10的上部靠置。
67.当研磨后的晶圆10从承载结构11脱离时,晶圆10向右侧移动而倒在位于设定位置的传送单元16上。这里,设定位置可设想为在其处传送单元16的接纳部分16b靠近且略低于装载在承载结构11中的晶圆10的底部的位置。此时,晶圆10的底部被接纳在接纳部分16b中,并且晶圆10整体顺势右倾,斜靠在传送单元16的靠置部分16c上。
68.需要注意的是,相比于静压板进行真空吸附而接触晶圆的整个表面的情况,传送单元16所接触的晶圆部位例如仅为晶圆的底部和上部,接触部位非常有限,因此对传送单元16进行清洁更加方便、快捷且易操作。
69.此外,传送单元16的靠置部分16c可构造成可直接擦拭干净的或可更换的,由此,可以有效地节约处理时间。
70.在本实施方式中,主体支架16a呈上部部分比下部部分宽的大致u形形状,并且接纳部分16b和靠置部分16c在主体支架16a的一侧分别对称地布置在u形的两个竖向延伸部上。通过这种方式,可以使晶圆10更稳定地放置在传送单元16上,并进一步减少传送单元16与晶圆10的接触面积。可以设想的是,主体支架16a还可以具有其他形状。
71.根据本公开的实施方式,主体支架16a可以由高强度合金例如铝合金制成。采用这种材质的材料制成的主体支架具有耐腐蚀、重量轻、易拆装、保养简单、平衡电压、强度大、环保易回收等特性。
72.参照图7,可以设想的是,主体支架16a的高度大于晶圆10的半径。可以在图7中清楚地观察到,当主体支架16a的高度h大于晶圆10的半径时,晶圆10的重心g可稳定地处于由晶圆10与传送单元16构成的三角区域内,由此可以确保晶圆10的稳定放置。
73.在本实施方式中,接纳部分16b可以为弧形斜凹槽,如图5和图6所示。弧形斜凹槽的深度和倾斜度可以分别构造成使得晶圆10的底部能够被稳定的接纳在弧形斜凹槽中以及使得晶圆10能够倾斜成使其上部靠置在靠置部分16c上。由此,可以确保晶圆10在传送单元16上的稳定放置。可以设想的是,接纳部分16b也可以采用其他形式。
74.在本实施方式中,靠置部分16c可以由聚四氟乙烯制成。由于聚四氟乙烯具有优异的化学稳定性、耐腐蚀性、密封性、电绝缘性和良好的抗老化耐性等特点,因此所制成的靠置部分16c具备耐高温、耐腐蚀、电绝缘性优良、耐磨耐老化等优势。
75.可选地,传送单元16还可以包括底座16d。底座16d设置在主体支架16a的底部处,以用于使传送单元16在处于待机状态时可以更稳固地放置在待机位置处。
76.下面,参照图8,对根据本公开的实施方式的为静压板上的通孔的驱动单元14的布局进行说明。
77.在本实施方式中,通孔14在每个静压板12a或12b上均为多个通孔。由于通孔在两侧静压板12a、12b上采用对称布置的方式,为方便描述,现仅针对左侧静压板12a来对通孔14的布局进行说明。
78.对于这些通孔14而言,其中的一部分通孔可以布置在静压板12a的靠近磨轮13a的区域处,并且其余通孔可以布置在静压板12a的与承载在承载结构11中的晶圆10的上部对应的区域处,其中,通过由这些其余通孔产生的气流施加至晶圆10的力大于通过由所述一部分通孔产生的气流施加至晶圆10的力。
79.具体而言,在本实施方式中,对于左侧静压板12a,在研磨完成时,布置成与晶圆10的上部对应的通孔14向晶圆10的上部进行喷气,并且布置在静压板12a的靠近磨轮13a的区域处的通孔14向晶圆10的中部和/或下部进行喷气。当由对晶圆10的上部喷射的气流施加至晶圆10的推力大于由对晶圆10的中部和/或下部喷射的气流施加至晶圆10的推力时,晶圆10的上部会首先向右侧移动,并使晶圆10整个向右侧倾倒,从而使晶圆10倾斜地倒在传送单元16上,以实现晶圆10的顺利传送。
80.类似地,对于右侧静压板12b,布置成与晶圆10的上部对应的通孔14对晶圆10的上部进行吸真空,并且布置在静压板12b的靠近磨轮13b的区域处的通孔14对晶圆10的中部和/或下部进行吸真空,当由对晶圆10的上部吸真空而产生的气流施加至晶圆10的吸力大于由对晶圆10的中部和/或下部吸真空而产生的气流施加至晶圆10的吸力时,晶圆10的上部会首先向右侧移动,并使晶圆10整个向右侧倾倒,从而使晶圆10倾斜地倒在传送单元16上,以实现晶圆10的顺利传送。
81.同样可以理解的是,上述两个过程可以同时进行。
82.可以设想的是,上述推力和/或吸力的大小可以通过调节由通孔产生的气流的流速来实现。具体而言,例如,对于推力,可以使布置在静压板12a的与承载在承载结构11中的晶圆10的上部对应的区域处的通孔整体所产生的气流的流速大于布置在静压板12a的靠近磨轮13a的区域处的通孔整体所产生的气流的流速,以使得由对晶圆10的上部喷射的气流施加至晶圆10的推力大于由对晶圆10的中部和/或下部喷射的气流施加至晶圆10的推力。对于吸力,可以进行类似设定,在此不再赘述。
83.关于气流的流速,可以设想通过将通孔构造为更大的例如对于圆孔而言直径更大来提供上述更大的气流流速。可以理解的是,还可以设想其他调节气流流速的方式。
84.此外,可以设想的是,与晶圆10的上部对应的通孔14可以优选地布置在静压板12a或12b的中间位置,由此可以使晶圆10顺利地倒在传送单元16上而不发生偏斜。
85.还可以设想的是,布置在静压板12a或12b的靠近磨轮13a或13b的区域处的通孔14可以在该区域处均匀地布置,例如绕磨轮所穿过的贯通孔的周向均匀地布置,而且,这些通
孔可以提供速度相等的气流,由此可以使晶圆10顺利地倒在传送单元16上而不发生偏斜。
86.图8提供了一种示例性实现方式。在图8中,所述多个通孔为4个通孔,其中,所述一部分通孔为3个通孔,对于静压板12a,为b1、b2和b3,而对于静压板12b,为b1*、b2*和b3*,并且这3个通孔关于相应的静压板12a或12b的竖向中心轴线对称地布置;并且所述其余通孔为1个通孔,对于静压板12a,为a,而对于静压板12b,为a*,并且这1个通孔布置在竖向中心轴线上。
87.对于静压板12a,由通孔a喷射的气流施加至晶圆10的推力优选地大于由其他3个通孔b1、b2和b3喷射的气流施加至晶圆10的推力;而对于静压板12b,由通孔a*吸真空而产生的气流施加至晶圆10的吸力优选地大于由其他3个通孔b1*、b2*和b3*吸真空而产生气流施加至晶圆10的吸力。此外,通孔b1、b2和b3各自产生的气流的流速优选是相等的,并且通孔b1*、b2*和b3*各自产生的气流的流速优选是相等的。由此,可以使晶圆10顺利地倒在传送单元16上而不发生偏斜,从而实现晶圆10的顺利传送。
88.下面,从总体上对利用根据本公开的实施方式的双面研磨装置1进行的双面研磨过程或说双面研磨方法进行描述。需要注意的是,该描述中涉及的双面研磨装置仅是示例性的,并且因此该双面研磨方法也是示例性的。
89.在研磨过程中,首先,研磨室门打开,机械臂吸取待加工的晶圆靠近左侧静压板进入研磨室内,并将晶圆移入承载结构中,与此同时,位于承载结构两侧的静压板上的通孔启动喷气模式,以通过流体静压以非接触的方式支撑晶圆,此时,机械臂从研磨室移出,两侧磨轮靠近晶圆以对晶圆同时开始加工。在研磨加工完成后,两侧磨轮停止并退出,右侧静压板向后移动,之后,传送单元从底部升起并靠近晶圆到达设定位置。然后,左侧静压板上的通孔向晶圆进行喷气,并且右侧静压板上的通孔对晶圆进行吸真空,使得晶圆向右倾斜而从承载结构脱离并倒在传送单元上以由其接纳。之后,传送单元向上移动到研磨室外,机械臂在研磨室外从传送单元吸取研磨后的晶圆并送入下一工序。吸取完成后,传送单元向下移动至待机位置,并且机械臂吸取新的待加工的晶圆进行新一轮研磨周期。
90.以上所述,仅为本公开的具体实施方式,但本公开的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本公开揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本公开的保护范围之内。因此,本公开的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1