一种激光熔覆机器人系统的制作方法
1.本实用新型属于激光熔覆技术领域,特别涉及一种激光熔覆机器人系统。
背景技术:
2.激光熔覆是通过在工件的表面添加熔覆材料,并利用高能密度的激光束使之与工件表面的薄层一起进行熔凝的方法。现有的激光熔覆设备主要是利用激光器对工件的表面进行熔覆加工,传统的熔覆设备的激光器和需要熔覆的工件无法实现自动化的加工移动,需要人工操作激光器逐一对准工件进行激光熔覆修复操作,工作效率低,劳动强度大,也容易造成工件表面熔覆修复不均匀,且很难实现加长型工件的加工,不能满足正常生产工艺的需求,对熔覆设备自身的加工精度的要求难度也很大。
技术实现要素:
3.本实用新型的目的是提供一种激光熔覆机器人系统,该系统能够自动化移动激光器和工件,从而实现对工件进行不同距离的熔覆,自动化程度高,降低了劳动强度和后期维修成本,提高了工作效率,解决了自动化对加长型工件表面进行激光熔覆增材修复的问题。
4.本实用新型的上述目的是通过以下技术方案得以实现的:
5.一种激光熔覆机器人系统,包括轨道a、轨道b、机械臂、立式旋转机构、移动式尾座和控制器;
6.所述轨道a和所述轨道b平行间隔设置,所述机械臂的底部与所述轨道a的顶部滑动连接,所述机械臂的机械手设置有熔覆头,所述熔覆头用于对工件进行激光熔覆,所述立式旋转机构和所述移动式尾座分别位于所述轨道b的左右两端,所述立式旋转机构和所述移动式尾座间隔相向设置,所述立式旋转机构的底部与所述轨道b的顶部固定连接,所述移动式尾座的底部与所述轨道b的顶部滑动连接,所述立式旋转机构用于驱动工件旋转并将工件需要激光熔覆部位对准所述机械臂的熔覆头,所述移动式尾座对工件进行定位和固定;
7.所述机械臂、所述立式旋转机构分别与所述控制器电连接。
8.其中优选方案如下:
9.优选的:所述立式旋转机构靠近所述移动式尾座的一侧设置有卡盘a,所述立式旋转机构的内部设置有电机a,所述电机a与所述控制器电连接,所述电机a的输出轴与所述卡盘a传动连接,所述电机a驱动所述卡盘a转动,所述卡盘a靠近所述移动式尾座的一侧与工件的端部可拆卸连接。
10.优选的:所述轨道b的顶部设置有若干个升降托举机构,若干个所述升降托举机构平行间隔设置,所述升降托举机构位于所述立式旋转机构与所述移动式尾座之间,所述升降托举机构的底部与所述轨道b的顶部滑动连接,所述升降托举机构的顶部与工件接触,所述升降托举机构用于支撑和托举工件。
11.优选的:所述升降托举机构包括托举座、丝杆a、丝杆b、托辊a、托辊b、托举块a和托
举块b,所述托举座的底部与所述轨道b的顶部滑动连接,所述丝杆a、所述丝杆b相对穿过所述托举座,所述丝杆a和所述丝杆b位于同一水平线上,所述丝杆a套设有螺母a,所述丝杆b套设有螺母b,所述托举块a的底部与所述螺母a的顶部固定连接,所述托举块b的底部所述螺母b的顶部固定连接,所述托辊a和所述托辊b平行间隔设置,所述托辊a与所述托举块a转动连接,所述托辊b与所述托举块b转动连接,所述托辊a、所述托辊b的外表面与工件接触,所述丝杆a和所述丝杆b通过转动分别带动托举块a、所述托举块b移动,从而调节所述托辊a和所述托辊b之间的中心距。
12.优选的:所述移动式尾座包括定位座、定位轴和手轮a,所述定位座的底部与所述轨道b滑动连接,所述定位轴的一端穿过所述定位座的上端并指向所述立式旋转机构,所述定位轴与所述定位座螺纹连接,所述定位轴靠近所述立式旋转机构的一端与工件接触,所述定位轴远离所述立式旋转机构的一端固定连接有手轮a,所述手轮a带动所述定位轴旋转对工件进行固定。
13.优选的:所述移动式尾座与所述轨道b的连接处、所述升降托举机构与所述轨道b的连接处分别设置有锁紧装置,所述锁紧装置竖直放置,所述锁紧装置包括锁紧座、锁紧轴和手轮b,所述锁紧轴的上端与所述手轮b固定连接,所述锁紧轴的下端自上而下穿过所述锁紧座,所述锁紧轴与所述锁紧座螺纹连接,所述移动式尾座处的锁紧轴下端自上而下穿过所述定位座与所述轨道b的顶部接触,所述移动式尾座处的锁紧座底部与所述定位座固定连接,所述升降托举机构处的锁紧轴下端自上而下穿过所述托举座与所述轨道b的顶部接触,所述升降托举机构处的锁紧座底部与所述托举座固定连接。
14.优选的:所述轨道a的左右两端分别设置有限位块a,所述限位块a靠近所述机械臂的一侧设置有位置传感器,所述位置传感器与所述控制器电连接,所述轨道b的顶部设置有限位块b,所述限位块b位于所述移动式尾座远离所述立式旋转机构的一侧。
15.优选的:所述轨道a的顶部设置有两个导轨a,两个所述导轨a平行间隔设置,所述导轨a的内侧设置有导向条,所述导向条的一侧沿长度方向与距离其最近的所述导轨a之间设置有滑槽,所述导向条的另一侧沿长度方向设置有花键。
16.优选的:所述机械臂的侧面设置有动力装置,所述动力装置包括电机c、移动块a和移动块b,所述电机c与所述控制器电连接,所述电机c竖直放置,所述电机c的侧面与所述机械臂的侧面固定连接,所述电机c的输出轴传动连接有主动齿轮,所述主动齿轮与所述导向条的花键传动连接,所述移动块a的侧面、所述移动块b的侧面分别与所述电机c远离所述机械臂的一侧固定连接,所述移动块a的底部转动连接有滚轮,所述移动块b的底部转动连接有被动齿轮,所述滚轮位于所述滑槽中,所述被动齿轮与所述主动齿轮、所述导向条的花键传动连接。
17.综上所述,本实用新型具有以下有益效果:
18.1、控制器控制机械臂沿着轨道a进行移动,方便对工件的不同位置和角度进行激光熔覆,控制器控制立式旋转机构工作,立式旋转机构驱动工件旋转,使得机械臂对工件的一处位置激光熔覆修复后,工件能够自动调整下一处位置对准机械臂,实现机械臂能够连续高效地对工件进行激光熔覆修复,且控制器控制机械臂的熔覆头来回移动对工件进行激光熔覆修复,也能够提高工件表面激光熔覆修复的平整度和均匀性,自动化程度高,降低了劳动强度,提高了工作效率,节约了成本。
19.2、立式旋转机构可以对加长型的工件进行固定旋转,立式旋转机构与移动式尾座配合使用,既能够实现对加长型工件的旋转,同时可以对加长型工件进行固定夹紧,防止机械臂在对工件进行激光熔覆的过程中工件发生偏转,提高激光熔覆的效率和质量。
20.3、升降托举机构与立式旋转机构配合使用,当立式旋转机构对大型加长型的工件进行驱动旋转时,升降托举机构能够在工件的下方对工件进行固定支撑,提高工件支撑的牢固性、稳定性和安全性,升降托举机构中通过调节托辊a和托辊b的中心距实现对工件的支撑托举,托辊a和托辊b与工件的外表面直接接触,既能够对工件进行高度可调的固定支撑,又不会影响立式旋转机构驱动工件旋转,同时能够避免对工件的外表面造成划伤和损坏。
21.4、移动式尾座和升降托举机构设置有锁紧装置,锁紧装置能够在移动式尾座和升降托举机构与轨道b的位置确定固定后,将移动式尾座、升降托举机构分别与轨道b进行固定,防止移动式尾座、升降托举机构与轨道b的位置发生偏移,从而影响对工件的定位固定和支撑托举,提高移动式尾座和升降托举机构工作时的稳定性,提高机械臂对工件激光熔覆修复操作的稳定性和精确度。
附图说明
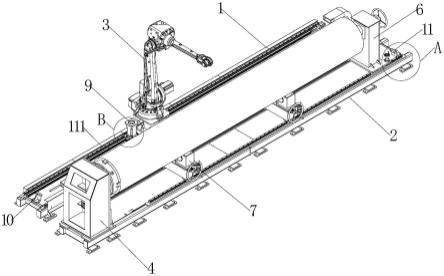
22.图1是实施例中的结构示意图ⅰ;
23.图2是实施例中的结构示意图ⅱ;
24.图3是图1中a处的放大图;
25.图4是图1中b处的放大图;
26.图5是实施例中立式旋转机构的结构示意图;
27.图6是实施例中立式旋转机构的剖面结构示意图;
28.图7是实施例中升降托举机构的结构示意图;
29.图8是实施例中升降托举机构的剖面结构示意图;
30.图9是实施例中移动式尾座的结构示意图。
31.图中,1、轨道a;2、轨道b;3、机械臂;4、立式旋转机构;6、移动式尾座;7、升降托举机构;8、锁紧装置;9、动力装置;10、限位块a;11、限位块b;111导轨a;112、导向条;113、滑槽;114、花键;411、卡盘a;412、电机a;611、定位座;612、定位轴;613、手轮a;711、托举座;712、丝杆a;713、丝杆b;714、托辊a;715、托辊b;716、托举块a;717、托举块b;718、螺母a;719、螺母b;811、锁紧座;812、锁紧轴;813、手轮b;911、电机c;912、移动块a;913、移动块b;914、主动齿轮;915、被动齿轮;916、滚轮。
具体实施方式
32.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅为本实用新型一部分实施例,而不是全部的实施例。
33.其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“上”、“下”、“左”、“右”、“顶部”、“底部”、“内”和“外”均指附图中的方向,但是并不加以限定。
34.如图1-图9所示,一种激光熔覆机器人系统,包括轨道a1、轨道b2、机械臂3、立式旋转机构4、移动式尾座6和控制器;轨道a1和轨道b2平行间隔设置,机械臂3的底部与轨道a1的顶部滑动连接,机械臂3的机械手设置有熔覆头,熔覆头用于对工件进行激光熔覆,立式旋转机构4和移动式尾座6分别位于轨道b2的左右两端,立式旋转机构4和移动式尾座6间隔相向设置,立式旋转机构4的底部与轨道b2的顶部固定连接,移动式尾座6的底部与轨道b2的顶部滑动连接,立式旋转机构4用于驱动工件旋转并将工件需要激光熔覆部位对准机械臂3的熔覆头,移动式尾座6对工件进行定位和固定;机械臂3、立式旋转机构4分别与控制器电连接。
35.立式旋转机构4靠近移动式尾座6的一侧设置有卡盘a411,立式旋转机构4的内部设置有电机a412,电机a412与控制器电连接,电机a412的输出轴与卡盘a411传动连接,电机a412驱动卡盘a411转动,卡盘a411靠近移动式尾座6的一侧与工件的端部可拆卸连接。
36.轨道b2的顶部设置有若干个升降托举机构7,若干个升降托举机构7平行间隔设置,升降托举机构7位于立式旋转机构4与移动式尾座6之间,升降托举机构7的底部与轨道b2的顶部滑动连接,升降托举机构7的顶部与工件接触,升降托举机构7用于支撑和托举工件。
37.升降托举机构7包括托举座711、丝杆a712、丝杆b713、托辊a714、托辊b715、托举块a716和托举块b717,托举座711的底部与轨道b2的顶部滑动连接,丝杆a712、丝杆b713相对穿过托举座711,丝杆a712和丝杆b713位于同一水平线上,丝杆a712套设有螺母a718,丝杆b713套设有螺母b719,托举块a716的底部与螺母a718的顶部固定连接,托举块b717的底部螺母b719的顶部固定连接,托辊a714和托辊b715平行间隔设置,托辊a714与托举块a716转动连接,托辊b715与托举块b717转动连接,托辊a714、托辊b715的外表面与工件接触,丝杆a712和丝杆b713通过转动分别带动托举块a716、托举块b717移动,从而调节托辊a714和托辊b715之间的中心距。
38.移动式尾座6包括定位座611、定位轴612和手轮a613,定位座611的底部与轨道b2滑动连接,定位轴612的一端穿过定位座611的上端并指向立式旋转机构4,定位轴612与定位座611螺纹连接,定位轴612靠近立式旋转机构4的一端与工件接触,定位轴612远离立式旋转机构4的一端固定连接有手轮a613,手轮a613带动定位轴612旋转对工件进行固定。
39.移动式尾座6与轨道b2的连接处、升降托举机构7与轨道b2的连接处分别设置有锁紧装置8,锁紧装置8竖直放置,锁紧装置8包括锁紧座811、锁紧轴812和手轮b813,锁紧轴812的上端与手轮b813固定连接,锁紧轴812的下端自上而下穿过锁紧座811,锁紧轴812与锁紧座811螺纹连接,移动式尾座6处的锁紧轴812下端自上而下穿过定位座611与轨道b2的顶部接触,移动式尾座6处的锁紧座811底部与定位座611固定连接,升降托举机构7处的锁紧轴812下端自上而下穿过托举座711与轨道b2的顶部接触,升降托举机构7处的锁紧座811底部与托举座711固定连接。
40.轨道a1的左右两端分别设置有限位块a10,限位块a10靠近机械臂3的一侧设置有位置传感器,位置传感器与控制器电连接,轨道b2的顶部设置有限位块b11,限位块b11位于移动式尾座6远离立式旋转机构4的一侧。
41.轨道a1的顶部设置有两个导轨a111,两个导轨a111平行间隔设置,导轨a111的内侧设置有导向条112,导向条112的一侧沿长度方向与距离其最近的导轨a111之间设置有滑
槽113,导向条112的另一侧沿长度方向设置有花键114。
42.机械臂3的侧面设置有动力装置9,动力装置9包括电机c911、移动块a912和移动块b913,电机c911与控制器电连接,电机c911竖直放置,电机c911的侧面与机械臂3的侧面固定连接,电机c911的输出轴传动连接有主动齿轮914,主动齿轮914与导向条112的花键114传动连接,移动块a912的侧面、移动块b913的侧面分别与电机c911远离机械臂3的一侧固定连接,移动块a912的底部转动连接有滚轮916,移动块b913的底部转动连接有被动齿轮915,滚轮916位于滑槽113中,被动齿轮915与主动齿轮914、导向条112的花键114传动连接。
43.控制器控制机械臂3沿着轨道a1进行移动,方便对工件的不同位置和角度进行激光熔覆,控制器控制立式旋转机构4工作,立式旋转机构4驱动工件旋转,使得机械臂3对工件的一处位置激光熔覆修复后,工件能够自动调整下一处位置对准机械臂3,实现机械臂3能够连续高效地对工件进行激光熔覆修复,且控制器控制机械臂3的熔覆头来回移动对工件进行激光熔覆修复,也能够提高工件表面激光熔覆修复的平整度和均匀性,自动化程度高,降低了劳动强度,提高了工作效率,节约了成本。
44.立式旋转机构4与移动式尾座6配合使用,既能够实现对加长型工件的旋转,同时可以对工件旋转后进行固定夹紧和定位,防止机械臂3在对工件进行激光熔覆的过程中工件发生偏转,提高了激光熔覆的效率和质量。
45.升降托举机构7与立式旋转机构4配合使用,当立式旋转机构4对大型加长型的工件进行驱动旋转时,升降托举机构7能够在工件的下方对工件进行固定支撑,提高工件支撑的牢固性、稳定性和安全性,升降托举机构7中通过调节托辊a714和托辊b715的中心距实现对工件的支撑托举,托辊a714和托辊b715与工件的外表面直接接触,既能够对工件进行高度可调的固定支撑,又不会影响立式旋转机构4驱动工件旋转,同时能够避免对工件的外表面造成划伤和损坏。
46.移动式尾座6和升降托举机构7设置有锁紧装置8,锁紧装置8能够在移动式尾座6和升降托举机构7与轨道b2的位置确定固定后,将移动式尾座6、升降托举机构7分别与轨道b2进行固定,防止移动式尾座6、升降托举机构7与轨道b2的位置发生偏移,从而影响对工件的定位固定和支撑托举,提高移动式尾座6和升降托举机构7工作时的稳定性,提高机械臂3对工件激光熔覆修复操作的稳定性和精确度。
47.具体实施过程:
48.对于大型加长型工件的激光熔覆修复操作,采用立式旋转机构4、移动式尾座6和升降托举机构7共同协调配合,实现对大型加长型工件进行固定旋转固定。将工件的一端安装在立式旋转机构4的卡盘a411中,使得卡盘a411的卡爪将工件进行夹紧固定,工件的另一端对准移动式尾座6,移动式尾座6沿着轨道b2滑动至定位轴612的端部与工件的端部接触,旋转手轮a613,手轮a613带动定位轴612向着工件方向转动,直至定位轴612的端部顶紧工件的端部,实现对工件的定位固定,若干个升降托举机构7沿着轨道b2滑动至均匀分散在工件的下方,旋转丝杆a712和丝杆b713,丝杆a712和丝杆b713通过反向旋转,分别带动托举块a716和托举块b717相向或者相背离移动,从而调节托辊a714和托辊b715之间的中心距,使得托辊a714和托辊b715的外表面与工件的外侧接触,实现对工件的支撑托举。移动式尾座6与升降托举机构7的位置确定后,旋转手轮b813,手轮b813带动锁紧轴812向下移动,直至锁紧轴812的下端与轨道b2的顶部顶紧,从而实现移动式尾座6与升降托举机构7的位置固定。
49.控制器控制立式旋转机构4中的电机a412工作,电机a412驱动卡盘a411转动,卡盘a411带动工件转动至需要激光熔覆的位置对准机械臂3,控制器控制动力装置9中的电机c911工作,电机c911驱动主动齿轮914转动,主动齿轮914与被动齿轮915、导向条112的花键114发生转动,主动齿轮914带动被动齿轮915转动与导向条112的花键114发生转动,主动齿轮914和被动齿轮915沿着导向条112的长度方向移动,从而带动机械臂3沿着轨道a1移动,待机械臂3移动至工件需要激光熔覆的位置,控制器控制电机c911停止运行,控制器控制机械臂3的熔覆头对准工件需要激光熔覆的位置进行激光熔覆修复操作。
50.滚轮916能够在主动齿轮914和被动齿轮915沿着导向条112的长度方向移动时起导向作用,避免主动齿轮914、被动齿轮915与导向条112发生偏移,从而提高机械臂3相对于轨道a1移动的准确性和稳定性,轨道a1设置的限位块a10能够在机械臂3沿着轨道a1移动的过程中对机械臂3起到止挡作用,避免机械臂3移动至轨道a1的端部时与轨道a1发生脱离,轨道b2设置的限位块b11能够在移动式尾座6沿着轨道b2移动过程中对移动式尾座6起到止挡作用,避免移动式尾座6移动至轨道b2的端部时与轨道b2发生脱离。
51.本具体实施例是对本实用新型的说明,但其并不是对本实用新型的限制,在本实用新型的实质范围内做出的变化、改型、添加或替换,都应属于本实用新型的保护范围,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1