方向盘控制半自动浇注机的制作方法
1.本实用新型涉及浇注机装置,具体涉及方向盘控制半自动浇注机。
背景技术:
2.浇注机是用来完成车间铸造浇注的设备,可以提高铸件成品率,减少铁液浪费和安全事故的发生,目前,国内铸造行业的浇注过程大多采用人工浇注和简易式浇注机,为了应对铸造生产中浇注熟练工人短缺、人工成本大幅上涨的局面,越来越多的企业采用自动浇注机进行浇注作业,以最大限度地发挥全自动造型生产线的生产效率,同时获得高质量的铸件产品,避免铁液的浪费,保证浇注过程的安全性,并节省人力和物力。
技术实现要素:
3.鉴于现有技术中的上述缺陷或不足,期望提供方向盘控制半自动浇注机。
4.根据本技术实施例提供的技术方案,
5.方向盘控制半自动浇注机,包括横向移动机构、进退移动机构、倾转机构、升降机构、孕育机构、和方向盘控制机构,
6.横向移动机构设置在进退移动机构的下端,横向移动机构包括第一伺服电机、第一行星减速机、链轮、链条、滚轮轴、滚轮、第一护罩、机架和安全开关,横向移动机构安装在机架上,第一伺服电机与第二行星减速机连接,第二行星减速机的前端安装有链轮,链轮上安装有相匹配的链条,通过链条驱动安装于滚轮轴上端链轮,从而带动安装于滚轮轴上的滚轮滚动,护罩安装于机架上,机架上安装有安全开关,所述机架配置有导向滚轮轴承,夹持在轨道两侧以防止滚轮在轨道上滚动时跑偏,横向移动机构负责浇注机的横向移动。
7.进退移动机构包括第二伺服电机、第二行星减速机、第二连接板、齿轮、齿条、第一滚珠滑块和第一直线导轨,进退移动机构通过第二连接板安装在升降机构的下端,第二伺服电机与第二行星减速机连接,第二行星减速机的输出端与齿轮连接,机架上安装有相啮合的齿条,齿轮带动齿条做前后移动,齿条及第一滚珠滑块安装在第二连接板下部,第一直线导轨安装在机架上,进退移动机构实现浇包的前后移动。
8.倾转机构包括第三伺服电机、第三行星减速机、支承座、浇包托架和视觉传感器,倾转机构通过支承座安装在升降机构上的滑块连接座上,第三伺服电机与第三行星减速机连接,第三行星减速机的输出端通过传动轴与浇包托架连接,浇包托架上安装有视觉传感器,浇包托架上还固定安装有相匹配的浇包,倾转机构实现浇包的倾转运动。
9.升降机构包括第四伺服电机、第四行星减速机、滚珠丝杠、滑块连接座、第二滚珠滑块、丝杠螺母、第二直线导轨、立柱护罩和升降立柱,升降机构上的第四伺服电机与第四行星减速机连接,第四行星减速机输出端与滚珠丝杠通过联轴器连接,滚珠丝杠上安装有丝杠螺母,丝杠螺母及第二滚珠滑块安装在滑块连接座上,第二滚珠滑块与第二直线导轨配合,立柱护罩与升降立柱连接,升降机构负责浇包的升降动作。
10.孕育机构包括第五伺服电机、第五行星减速机、送料管、料斗、导向管、第三连接
板、第三滚珠滑块和第三直线导轨,第五伺服电机的与第五行星减速机连接,第五行星减速机的输出端与送料管内的螺旋轴连接,送料管上端安装有料斗,送料管远离五行星减速机的一端下部设有导向管,送料管与第五行星减速机连接的部位安装有第三连接板,第三连接板上设有第三滚珠滑块,第三连接板通过第三滚珠滑块与第三直线导轨配合连接,孕育机构负责浇注时孕育剂的投料。
11.方向盘控制机构包括第六伺服电机、第六行星减速机、小带轮、同步带、大带轮、连接轴、方向盘和支架,方向盘控制机构通过支架安装在驾驶室内,第六伺服电机输出端与第六行星减速机连接,第六伺服电机可以反馈方向盘的转动角度,可以使方向盘在不操作时自动回原位,第六行星减速机的输出端与小带轮连接,小带轮上安装有同步带,同步带远离小带轮的一端与大带轮连接,大带轮与连接轴以键连接,连接轴不与大带轮连接的一端安装有方向盘,方向盘控制机构负责控制浇包的旋转角度及速度。
12.综上所述,本技术的有益效果:能够实现水平脱箱造型线的自动浇注,各个执行机构之间使用伺服电机驱动,具有响应速度快、运行平稳可靠等特点,提高了浇注过程的安全性,并节省人力和物力。
附图说明
13.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
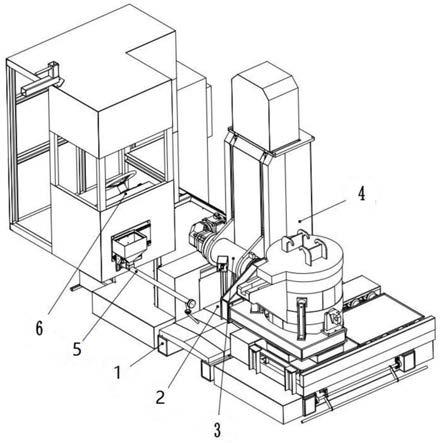
14.图1为本实用新型总体结构示意图;
15.图2为本实用新型中横向移动机构示意图;
16.图3为本实用新型中进退移动机构示意图;
17.图4为本实用新型中倾转机构示意图;
18.图5为本实用新型中升降机构示意图;
19.图6为本实用新型中孕育机构示意图;
20.图7为本实用新型中方向盘控制机构示意图。
21.图中标号:横向移动机构-1、第一伺服电机-1.1、第一行星减速机
ꢀ‑
1.2、链轮-1.3、链条-1.4、滚轮轴-1.5、滚轮-1.6、第一护罩-1.7、机架-1.8、安全开关-1.9、进退移动机构-2、第二伺服电机-2.1、第二行星减速机-2.2、第二连接板-2.3、齿轮-2.4、齿条-2.5、第一滚珠滑块-2.6、第一直线导轨-2.7、倾转机构-3、第三伺服电机-3.1、第三行星减速机-3.2、支承座-3.3、浇包托架-3.4、视觉传感器-3.5、升降机构-4、第四伺服电机-4.1、第四行星减速机-4.2、滚珠丝杠-4.3、滑块连接座-4.4、第二滚珠滑块-4.5、丝杠螺母-4.6、第二直线导轨-4.7、第二护罩-4.8、第二机架-4.9、孕育机构-5、第五伺服电机-5.1、第五行星减速机-5.2、送料管-5.3、料斗-5.4、导向管-5.5、第三连接板-5.6、第三滚珠滑块-5.7、第三直线导轨5.8、方向盘控制机构-6、第六伺服电机-6.1、第六行星减速机-6.2、小带轮-6.3、同步带-6.4、大带轮-6.5、连接轴-6.6、方向盘-6.7、支架-6.8。
具体实施方式
22.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了
便于描述,附图中仅示出了与发明相关的部分。
23.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
24.如图1所示,在造型机给出待浇注砂型的型板信息、铸型高度信息后浇注机收到信息后确定浇口位置、浇注高度、浇注重量并按顺序依次浇注,浇包托架3.4上的浇包的驱动点靠近浇包重心位置,浇注过程中倾转机构4上的浇包的浇嘴与砂型浇口的相对位置不变,浇注机上的升降机构4和进退移动机构2根据浇包倾转角度自动调整位置,浇注机正在浇注的过程中,砂型发生了移动,浇注机上横向移动机构1的可根据生产线反馈的位移量跟随砂型同步移动浇注,同时根据生产浇注工艺的不同,倾转机构4上的浇包托架3.4可实时更换4种不同规格的浇包,各机构间根据实际情况配置互锁信号以确保安全运行。
25.如图2所示,横向移动机构1安装于机架1.8上,负责浇注机的横向移动,横向移动机构1上的驱动电机为第一伺服电机1.1,第一伺服电机1.1驱动第一行星减速机1.2后,第一行星减速机1.2带动链轮1.3 转动,再通过链条1.4将动力传递给滚动轴1.5,滚动轴1.5带动两侧滚轮在轨道上做直线运动,机架上配置导向滚轮轴承,夹持在轨道两侧以方式滚轮在轨道上滚动时跑偏。
26.如图3所示,进退移动机构2通过第二连接板2.3固定于升降机构 4的下端,第二连接板2.3的导向采取第一滚珠滑块2.6+第一直线导轨 2.7的方式,进退移动机构2上的第二伺服电机2.1安装于第二连接板 2.3上的第二行星减速机2.2后端,第二行星减速机2.2带动齿轮2.4 转动,并与齿条2.5啮合做前后移动,齿条2.5固定安装于机架上。
27.如图4所示,倾转机构3通过支承座3.3安装于升降机构4上的滑块连接座4.4上,倾转机构3用于实现浇包的倾转运动,倾转机构3的驱动电机为第三伺服电机3.1,第三伺服电机3.1通过第三行星减速机3.2带动传动轴转动,浇包托架固3.4接于传动轴上,浇包安装于浇包托架3.4上。
28.如图5所示,升降机构4负责浇包的升降动作,升降机构的驱动电机为第四伺服电机4.1,第四伺服电机4.1通过第四行星减速机4.2带动滚珠丝杠4.3旋转,滚珠丝杠4.3带动滑块连接座4.4上下运动,滑块连接座4.4上装有第二滚珠滑块4.5以及丝杠螺母4.6。
29.如图6所示,孕育机构5安装于驾驶室前部下方,孕育机构5负责浇注时孕育剂的投料,孕育机构5可以手动调节左右移动,由第三滚珠滑块5.7和第三直线导轨5.8支承导向,孕育机构5的驱动电机为第五伺服电机5.1,第五伺服电机5.1通过第五行星减速机5.2减速后带动螺旋叶片轴转动,螺旋叶片轴把料斗内的孕育剂通过送料管5.3输送至铸型浇口附近。
30.如图7所示,方向盘控制机构6安装于驾驶室内,方向盘控制机构 6负责驱动控制浇包的浇注动作,并且通过人工操作方向盘控制机构6 用以控制浇包的倾转角度,方向盘控制机构6下方装有第六伺服电机6.1 及第六行星减速机6.2,第六伺服电机6.1可以反馈方向盘的转动角度,并且可以使方向盘在不操作时自动回原位。
31.以上描述仅为本技术的较佳实施例以及对所运用技术原理等方案的说明。同时,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征
进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1