一种光纤预制棒外包层有效沉积控制系统的制作方法
1.本实用新型属于光纤预制棒制备技术领域,具体涉及一种光纤预制棒外包层有效沉积控制系统。
背景技术:
2.光纤预制棒是光纤拉丝工序中最主要、最关键的原材料,其由芯棒和外包层组成。目前,光纤预制棒制造可以通过全合成工艺方法实现,即vad+ovd联合生产工艺,其中,vad工艺主要生产芯棒,通过ovd工艺在芯棒表面沉积外包层而高效率地生产光纤预制棒。
3.如图1所示,ovd设备结构包括设备本体2,其内设置喷灯平台2、喷灯平台上下、左右驱动机构、芯棒旋转、补风、冷却及称重等机构。喷灯平台2上设置喷灯和各种原材料管路。ovd工艺沉积过程是甲烷、氧气和四氯化硅等原料气体燃烧后从喷灯喷出发生氧化水解反应生成二氧化硅颗粒产物的过程,通过抽风(设备本体2上设置抽风接口1,连接外部的抽风设备)和补风等外界环境作用下吸附到不断旋转的芯棒上的一种光纤预制棒生产工艺。如图2所示,在外界条件不变的条件下,喷灯到预制棒外包层收集二氧化硅颗粒效率最高的距离我们称为最佳收集距离d。现有ovd工艺设备是根据沉积前导入的一个配方进行机械的控制喷灯平台上下运行,理论上使预制棒外包层处于喷灯的最佳沉积距离进行沉积,但实际并未考虑沉积过程中腔体温度、抽风压力、补风量、甲烷、氧气、四氯化硅反应生成二氧化硅量等参数变化而导致的预制棒外包层收集能力波动,这样导致沉积出来的外包层不在最佳沉积距离上,导致整个工艺过程中sio2的实际收集效率降低、浪费原材料,进而导致实际沉积生产时间加长,增加了光纤预制棒soot(半成品)报废的概率,同时也增加了外围废气处理设备和沉积生产设备的负荷,也增加了设备的维保保养成本,不利于成本的降低。在实际生产过程中,为了避免这些问题,采取的措施是根据前面几个批次生产的工艺数据不断优化配方提高收集效率,这种方法有一定可行性但对工艺人员要求较高,不仅要求有较高的专业水平同时要求有大量数据处理能力,且生产设备较多时、工作量很大容易出错。
技术实现要素:
4.本实用新型要解决的技术问题是针对光纤预制棒外包层不在喷灯最佳收集距离而导致的 sio2收集效率低、工艺时间长的问题。本实用新型一种光纤预制棒外包层有效沉积控制系统及控制方法,保证预制棒外包层沉积表面始终在喷灯最佳收集位置上,从而让sio2收集效率最大化,减少工艺时间。
5.本实用新型所采用的技术方案为:
6.一种光纤预制棒外包层有效沉积控制系统,包括用于产生激光光幕并检测光纤预制棒 soot外包层位置的对射式激光传感器,喷灯平台两侧设置激光器安装支架,对射式激光传感器固定在激光器安装支架上;对射式激光传感器与喷灯平台的上下驱动机构伺服电机连锁,通过pid控制保持喷灯与光纤预制棒soot外包层距离维持在最佳收集距离。
7.一种光纤预制棒外包层有效沉积控制方法,包括:
8.理论上,最佳收集距离d=对射式激光传感器光幕未被遮挡住距离d1+喷灯到对射式激光传感器光幕最下端距离d2;
9.生产时,芯棒旋转,在抽风作用下,由喷灯产生的二氧化硅颗粒不断吸附在芯棒表面使其直径不断变大;激光光幕实际测量的未被遮挡住距离d3不断变化,此时激光光幕实际测量的未被遮挡住距离d3+喷灯到对射式激光传感器光幕最下端距离d2为实际收集距离d4,将激光光幕实际测量的未被遮挡住距离d3反馈至pid控制系统,控制喷灯平台移动,使实际测量的未被遮挡住距离d3尽可能等于对射式激光传感器光幕未被遮挡住距离d1,实际收集距离d4尽可能的等于最佳收集距离d,维持最佳收集状态。
10.进一步地,对射式激光传感器光幕未被遮挡住距离d1和激光光幕实际测量的未被遮挡住距离d3根据对射式激光传感器反馈的百分比位置,结合激光光幕宽度计算得到。
11.本实用新型的有益效果在于:
12.本实用新型利用安装在喷灯平台两侧的对射式激光传感器确定初始芯棒表面相对于喷灯平台的位置,生产过程中,光纤预制棒soot半成品(初始为芯棒)一直旋转,在抽风和喷灯火焰作用下,其直径不断沉积变大,在直径变大的同时,pid控制系统利用激光传感器反馈的位置信号,控制喷灯平台不断调整其上下运动的速度(主要是向下),使预制棒soot 半成品的边缘到喷灯处于最佳收集位置,从而提高sio2的收集效率、缩短工艺时间,减少设备负载,降低生产成本。
附图说明
13.图1为ovd设备的结构示意图;
14.图2为最佳收集距离示意图;
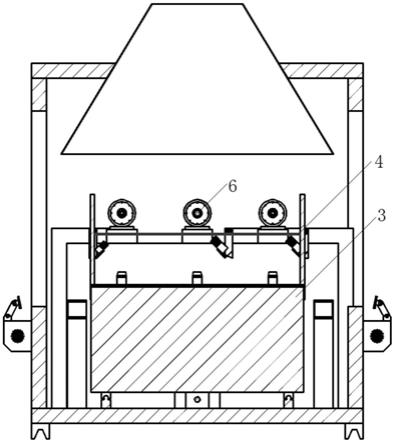
15.图3为ovd设备剖视图;
16.图4为ovd设备生产过程示意图;
17.图5为理论生产过程中,d、d1、d2示意图;
18.图6为实际生产过程中,d2、d3、d4示意图;
19.附图标记:1
‑
抽风接口,2
‑
设备本体,3
‑
喷灯平台,4
‑
对射式激光传感器,5
‑
光纤预制棒 soot,6
‑
芯棒。
具体实施方式
20.下面结合附图和具体的实施例对本实用新型的光纤预制棒外包层有效沉积控制系统及控制方法作进一步地详细说明。
21.如图1至4所示,一种光纤预制棒外包层有效沉积控制系统,包括用于产生激光光幕并检测光纤预制棒soot5外包层位置的对射式激光传感器4,喷灯平台3两侧设置激光器安装支架,对射式激光传感器4固定在激光器安装支架上。对射式激光传感器4与喷灯平台3的上下驱动机构伺服电机连锁,通过pid控制保持喷灯与光纤预制棒soot5外包层距离维持在最佳收集距离。
22.如图5和图6所示,一种光纤预制棒外包层有效沉积控制方法,包括:
23.考虑到散热、安装等情况,理论上设计为:最佳收集距离d=对射式激光传感器4光幕未被遮挡住距离d1+喷灯到对射式激光传感器4光幕最下端距离d2。以下简称为d、d1、d2。
24.在实际生产刚开始初始阶段,根据设备设计不同芯棒6(未开始沉积)位置可能有五种情况:1、完全挡住光幕;2、在光幕下端边缘遮住一点激光;3、光幕下端;4、光幕上端边缘遮住一点激光;5、光幕上端,这不影响实际沉积仅影响准备生产时芯棒的安装和最后结束后取出soot成品步骤,在此不做深入讨论。
25.在初始生产阶段,对芯棒6预热时无论芯棒6在哪个位置,在预热阶段即进入最佳收集距离位置,根据光幕被遮挡反馈的信号,可以计算出芯棒位置,其中1、2、4三种情况直接运动到最佳位置即d1处,3和5需要上下运动一定距离到光幕确定运动方向再运动到d1处。
26.生产阶段:生产时,芯棒6旋转,在抽风作用下,由喷灯火焰燃烧产生的二氧化硅颗粒不断吸附在芯棒6表面使其直径不断变大。激光光幕实际测量的未被遮挡住距离不断变化,定义为d3,此时d3+d2为实际收集距离,定义为d4。当d4等于d时收集效率最高。随着沉积工艺的进行,预制棒外包层直径逐渐增大,如果喷灯平台不向下运动,此时d3距离减小,从而导致d4小于最佳收集距离d,此时实际收集效率降低。为了避免此情况产生,将激光光幕实际测量的未被遮挡住距离d3反馈至pid控制系统进行数据处理,控制喷灯平台3 向下运动(主要是向下运动,向上运动仅在少数情况,喷灯平台3运动过多导致d3>d1进行补偿),使d3尽可能的等于d1,让d4尽可能的等于d,从而维持设备一直处最佳收集状态。
27.对射式激光传感器4光幕未被遮挡住距离d1和激光光幕实际测量的未被遮挡住距离d3 根据对射式激光传感器4反馈的百分比位置,结合激光光幕宽度计算得到。
28.本实用新型通过pid系统计算出激光光幕实际被遮挡位置,并将其和理论设定位置进行 pid运算得出喷灯平台3上下运动机构伺服电机速度,从而精确控制平台喷灯3上下运动,使喷灯对应于光纤预制棒soot5外包层距离处于最佳状态。
29.需要指出,本实用新型的光纤预制棒外包层有效沉积控制系统适用于多根光纤预制棒外包层的同时沉积,如图本实施例中,光纤预制棒数量为三根。
30.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1