动态交通场景显示系统及显示方法与流程
1.本发明涉及车辆技术领域,尤其是涉及一种动态交通场景显示系统及显示方法。
背景技术:
2.目前的车辆还存在一些问题,驾驶员行车时不能直观方便地观察自车前方交通状况,驾驶便利还有待提高,对自车前方可能出现的一些危险情况不能提前报警,行车的安全性也有待提高。
技术实现要素:
3.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明的一个目的在于提出一种动态交通场景显示系统,一方面可以将自车前方交通信息实时显示在显示模块上,驾驶员可以直观方便地通过显示模块观察自车前方交通信息,驾驶便利,另一方面可以及时对自车前方可能出现的危险情况进行提前报警,保证行车的安全性。
4.根据本发明第一方面实施例的动态交通场景显示系统,包括:
5.车载感知传感器,所述车载感知传感器模块用于实时探测自车前方交通信息;
6.感知信号处理模块,所述感知信号处理模块根据所述自车前方交通信息识别出目标并提取目标属性;
7.决策和控制模块,所述决策和控制模块根据所述感知信号处理模块输出的目标及目标属性进行目标选择并对选择的目标进行目标分析,根据目标分析结果及显示策略输出目标显示信息,及根据目标分析结果判断是否需要输出报警指令;
8.显示模块,所述显示模块根据所述目标显示信息对目标进行显示;
9.报警模块,所述报警模块根据所述决策和控制模块输出的所述报警指令进行报警。
10.根据本发明实施例的动态交通场景显示系统,基于车辆感知传感器对自车前方交通信息进行探测,在亮度不足或能见度较低时可以准确探测自车前方交通信息,自车前方交通信息经由感知信号处理模块进行目标识别和目标属性提取,决策和控制模块对感知信号处理模块输出的目标及目标属性进行目标选择并对选择的目标进行目标分析,决策和控制模块根据目标分析结果及显示策略输出目标显示信息,显示模块根据目标显示信息对目标进行显示,决策和控制模块根据目标分析结果判断是否需要输出报警指令,报警模块根据决策和控制模块输出的报警指令进行报警。综上,本发明实施例的动态交通场景显示系统一方面可以将自车前方交通信息实时显示在显示模块上,驾驶员可以直观方便地通过显示模块观察自车前方交通信息,驾驶便利,另一方面可以及时对自车前方可能出现的危险情况进行提前报警,保证行车的安全性。
11.根据本发明第一方面的一个实施例,所述自车前方交通信息包括前方道路信息、交通参与者信息和前方环境信息;所述感知信号处理模块识别出的目标包括道路元素目标、交通参与者目标和车外环境目标;所述感知信号处理模块提取的目标属性包括道路元
素目标属性和交通参与者目标属性。
12.根据本发明第一方面进一步的实施例,所述感知信号处理模块识别出目标并提取目标属性,包括:
13.接收所述车载感知传感器探测到的所述自车前方交通信息;
14.对所述自车前方交通信息进行噪声滤波处理;
15.对目标进行识别和分类,融合所述车载感知传感器的数据;
16.根据所述车载感知传感器获取目标参数,提取目标属性。
17.根据本发明第一方面再进一步的实施例,所述决策和控制模块进行目标选择时,遵循如下策略:
18.所述目标在以自车车头中心点为起点,前方l1米、左边l2米、右边l3米的区域内选择;所述交通参与者目标优先选择车辆和行人,所述道路元素目标优先选择交通灯和限速信息。
19.根据本发明第一方面再进一步的实施例,所述决策和控制模块进行所述目标分析时,遵循如下两个维度:
20.目标是否对自车有危险;当目标无危险时,则判断目标为安全目标,当目标有危险时;则判断目标为危险目标,且所述显示模块上区别显示所述危险目标,同时所述报警模块对所述危险目标发出报警;
21.若所述道路元素目标状态发生变化,则语音播报给驾驶员。
22.根据本发明第一方面再进一步的实施例,所述目标是否对自车有危险采用目标与自车相对距离l与相对速度v的比值ttc进行判断;当ttc》=门限值1,目标为所述安全目标;当ttc《门限值1,目标为所述危险目标。
23.根据本发明第一方面再进一步的实施例,所述显示策略包括:
24.只显示目标选择区域内的目标;
25.区别显示危险目标与安全目标;
26.若所述道路元素目标状态发生变化,显示状态相应地变化;
27.根据平滑处理策略对目标属性进行平滑处理:若当前目标属性参数值与前一时刻变化值小于阈值1时,目标属性不发生变化;若当前目标属性参数与前一时刻属性值变化超过阈值1时,目标属性值更新;
28.弱势的道路参与者优先显示;
29.接收用户输入设备对目标选择需求。
30.根据本发明第一方面再进一步的实施例,所述决策和控制模块对危险目标和驾驶员不遵守交通规则时发出报警指令给报警模块。
31.根据本发明第一方面再进一步的实施例,所述决策和控制模块在危险目标出现、驾驶员没有按交通规则驾驶或弱势的道路参与者出现在当前车辆行驶路径中时发出报警指令,其中,所述决策和控制模块发出报警指令的优先级是:所述危险目标出现优先于所述驾驶员没有按交通规则驾驶,所述驾驶员没有按交通规则驾驶优先于所述弱势的道路参与者出现在当前车辆行驶路径中。
32.根据本发明第一方面的一些实施例,还包括:
33.用户个性化设置模块,所述用于个性化设置模块支持用户对显示目标的选择、报
警类型及亮度的设置。
34.本发明第二方面还提出了一种动态交通场景显示方法。
35.根据本发明第二方面实施例的动态交通场景显示方法,包括:
36.实时探测自车前方交通信息;
37.根据所述自车前方交通信息识别出目标并提取目标属性;
38.根据识别出的目标及目标属性进行目标选择并对选择的目标进行目标分析,根据目标分析结果及显示策略输出目标显示信息,及根据目标分析结果判断是否需要输出报警指令;
39.根据所述目标显示信息对目标进行显示;
40.根据所述报警指令进行报警。
41.根据本发明实施例的动态交通场景显示方法,对自车前方交通信息进行探测,在亮度不足或能见度较低时可以准确探测自车前方交通信息,对自车前方交通信息进行识别,识别出目标并提取目标属性,根据识别出的目标及目标属性进行目标选择并对选择的目标进行目标分析,一方面根据目标分析结果及显示策略输出目标显示信息并根据目标显示信息进行显示,这样,驾驶员可以直观方便地观察自车前方交通信息,驾驶便利,另一方面根据目标分析结果判断是否需要输出报警指令并在判断需要报警的时候根据报警指令进行报警,这样,可以及时对自车前方可能出现的危险情况进行提前报警,保证行车的安全性。
42.根据本发明第二方面的一个实施例,所述自车前方交通信息包括前方道路信息、交通参与者信息和前方环境信息;所述识别出目标包括识别出道路元素目标、交通参与者目标和车外环境目标;所述提取目标属性包括提取道路元素目标属性和交通参与者目标属性。
43.根据本发明第二方面进一步的实施例,所述进行目标选择遵循如下策略:
44.所述目标在以自车车头中心点为起点,前方l1米、左边l2米、右边l3米的区域内选择;所述交通参与者目标优先选择车辆和行人,所述道路元素目标优先选择交通灯和限速信息。
45.根据本发明第二方面再进一步的实施例,所述进行目标分析遵循如下两个维度:
46.目标是否对自车有危险;当目标无危险时,则判断目标为安全目标;当目标有危险时,则判断目标为危险目标,且所述显示模块上区别显示所述危险目标,同时所述报警模块对所述危险目标发出报警;
47.若所述道路元素目标状态发生变化,则语音播报给驾驶员。
48.根据本发明第二方面再进一步的实施例,所述目标是否对自车有危险采用目标与自车相对距离l与相对速度v的比值ttc进行判断;当ttc》=门限值1,目标为所述安全目标;当ttc《门限值1,目标为所述危险目标。
49.根据本发明第二方面再进一步的实施例,所述显示策略包括:
50.只显示目标选择区域内的目标;
51.区别显示危险目标与安全目标;
52.若所述道路元素目标状态发生变化,显示状态相应地变化;
53.根据平滑处理策略对目标属性进行平滑处理:若当前目标属性参数值与前一时刻
变化值小于阈值1时,目标属性不发生变化;若当前目标属性参数与前一时刻属性值变化超过阈值1时,目标属性值更新;
54.弱势的道路参与者优先显示;
55.接收用户输入设备对目标选择需求。
56.根据本发明第二方面再进一步的实施例,在所述危险目标和驾驶员不遵守交通规则情况下发出报警。
57.根据本发明第二方面再进一步的实施例,在当所述危险目标出现、驾驶员没有按交通规则驾驶或弱势的道路参与者出现在当前车辆行驶路径中时发出报警指令,其中,发出报警指令的优先级为:所述危险目标出现优先于所述驾驶员没有按交通规则驾驶,所述驾驶员没有按交通规则驾驶优先于所述弱势的道路参与者出现在当前车辆行驶路径。
58.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
59.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
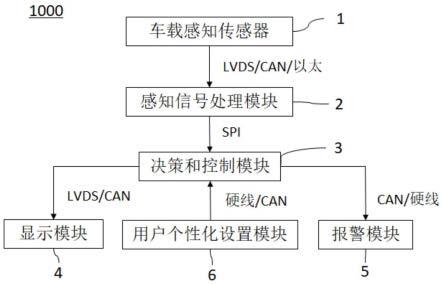
60.图1为本发明第一方面实施例的动态交通场景显示系统的结构示意图。
61.图2为本发明第一方面实施例的动态交通场景显示系统的工作流程图。
62.图3为本发明第二方面实施例的动态交通场景显示方法的流程图。
63.附图标记:
64.动态交通场景显示系统1000
65.车载感知传感器1
66.感知信号处理模块2
67.决策和控制模块3
68.显示模块4
69.报警模块5
70.用户个性化设置模块6
71.动态交通场景显示方法2000
具体实施方式
72.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
73.下面结合图1至图2来描述本发明实施例的动态交通场景显示系统1000。
74.如图1和图2所示,根据本发明第一方面实施例的动态交通场景显示系统1000,包括车载感知传感器1、感知信号处理模块2、决策和控制模块3、显示模块4和报警模块5,车载感知传感器1模块用于实时探测自车前方交通信息;感知信号处理模块2根据自车前方交通信息识别出目标并提取目标属性;决策和控制模块3根据感知信号处理模块2输出的目标及目标属性进行目标选择并对选择的目标进行目标分析,根据目标分析结果及显示策略输出
目标显示信息,及根据目标分析结果判断是否需要输出报警指令;显示模块4根据目标显示信息对目标进行显示;报警模块5根据决策和控制模块3输出的报警指令进行报警。
75.具体地,车载感知传感器1模块用于实时探测自车前方交通信息。可以理解的是,车辆感知传感器可以安装在车辆前方,车载感知传感器1模块为车外环境感知模块,包括多种传感器,例如摄像头模块、声音传感器、雷达和红外检测模块等,通过视频、图片、声音和红外探测结果等对自车前方的交通信息进行实时获取。
76.感知信号处理模块2根据自车前方交通信息识别出目标并提取目标属性。可以理解的是,感知信号处理模块2与车载感知传感器1之间可以通过lvds、can或以太网进行信号传输,根据实际情况选择通道类型,感知信号处理模块2接收多种传感器获取到的自车前方交通信息,利用多种传感器的优势,融合多种传感器的数据,对不同的目标进行识别并提取目标的属性,例如,感知信号处理模块2根据视觉传感器获取的目标形状信息和目标类型信息进行目标识别,判断目标的种类并提取目标的颜色等信息。
77.决策和控制模块3根据感知信号处理模块2输出的目标及目标属性进行目标选择并对选择的目标进行目标分析,根据目标分析结果及显示策略输出目标显示信息,及根据目标分析结果判断是否需要输出报警指令。可以理解的是,决策和控制模块3与感知信号处理模块2之间可以通过spi进行信号传输,可以实现板级内部通讯,传输速度快,决策和控制模块3基于感知信号处理模块2识别的目标及目标属性进行目标选择,目标选择的范围和参数根据车载传感器的能力而定,预先制定目标分析方法和显示策略,对选择出的目标进行分析,并根据目标分析结果及显示策略输出目标显示信息。
78.显示模块4根据目标显示信息对目标进行显示。具体地,显示模块4与决策和控制模块3可以通过lvds或can进行信号传输,根据实际情况选择通道类型,显示模块4接收到决策和控制模块3发出的目标显示信息并对目标进行显示,这样,驾驶员可以直观地从显示模块4上观察自车前方交通情况。
79.报警模块5根据决策和控制模块3输出的报警指令进行报警。具体地,报警模块5与决策和控制模块3可以通过can或硬线进行信号传输,根据实际情况选择通道类型,报警模块5接收到决策和控制模块3输出的报警指令并进行报警,这样,报警模块5及时报警,驾驶员可以及时发现自车前方的危险并做出对应的措施。
80.根据本发明实施例的动态交通场景显示系统1000,基于车辆感知传感器对自车前方交通信息进行探测,在亮度不足或能见度较低时可以准确探测自车前方交通信息,自车前方交通信息经由感知信号处理模块2进行目标识别和目标属性提取,决策和控制模块3对感知信号处理模块2输出的目标及目标属性进行目标选择并对选择的目标进行目标分析,决策和控制模块3根据目标分析结果及显示策略输出目标显示信息,显示模块4根据目标显示信息对目标进行显示,决策和控制模块3根据目标分析结果判断是否需要输出报警指令,报警模块5根据决策和控制模块3输出的报警指令进行报警。综上,本发明实施例的动态交通场景显示系统1000一方面可以将自车前方交通信息实时显示在显示模块4上,驾驶员可以直观方便地通过显示模块4观察自车前方交通信息,驾驶便利,另一方面可以及时对自车前方可能出现的危险情况进行提前报警,保证行车的安全性。
81.根据本发明第一方面的一个实施例,自车前方交通信息包括前方道路信息、交通参与者信息和前方环境信息;感知信号处理模块2识别出的目标包括道路元素目标、交通参
与者目标和车外环境目标;感知信号处理模块2提取的目标属性包括道路元素目标属性和交通参与者目标属性。具体地,自车前方交通信息中的前方道路信息包括自车前方的车道线、交通灯和限速信息等,交通参与者信息包括自车前方的车辆、行人和动物信息等,前方环境信息包括自车前方的自然环境信息,感知信号处理模块2对道路元素目标进行识别和分类并获取道路元素的属性,属性包括道路元素的颜色、内容和是否有危险等,感知信号处理模块2对交通参与者目标进行识别和分类并获取交通参与者的属性,属性包括交通参与者的位置、速度和危险性等,感知信号处理模块2对车外环境目标进行识别。
82.根据本发明第一方面进一步的实施例,感知信号处理模块2识别出目标并提取目标属性,包括:
83.接收车载感知传感器1探测到的自车前方交通信息;
84.对自车前方交通信息进行噪声滤波处理;
85.对目标进行识别和分类,融合车载感知传感器1的数据;
86.根据车载感知传感器1获取目标参数,提取目标属性。
87.可以理解的是,车载感知传感器1探测到的自车前方交通信息中包括很多干扰信息,干扰信息会影响感知信号处理模块2对自车前方交通信息的目标识别和目标属性提取效果,大大影响系统的准确性,通过感知信号处理模块2对车前方交通信息进行噪声滤波处理,大大地提高了车前方交通信息的质量,感知信号处理模块2对噪声处理后的自车前方交通信息进行目标识别和分类,在目标识别和分类过程中,感知信号处理模块2融合车载感知传感器1中多种传感器的优势,识别效果好,分类更加准确;感知信号处理模块2根据车载感知传感器1中多种传感器获取的目标参数,对目标的属性进行提取,例如目标的位置、颜色、内容和是否有危险等。
88.根据本发明第一方面再进一步的实施例,决策和控制模块3进行目标选择时,遵循如下策略:
89.目标在以自车车头中心点为起点,前方l1米、左边l2米、右边l3米的区域内选择,其中,区域参数l1、l2和l3根据车载传感器的能力而定;交通参与者目标优先选择车辆和行人,道路元素目标优先选择交通灯和限速信息。可以理解的是,根据车载传感器中多种传感器的探测范围确定区域参数l1、l2和l3,保证车前方交通信息的质量;交通参与者目标优先选择车辆和行人,可以减少碰撞事故的发生,提高车辆行驶安全性;道路元素目标优先选择交通灯和限速信息,可以提醒车辆遵守交通规则,提高车辆行驶安全性。
90.根据本发明第一方面再进一步的实施例,决策和控制模块3进行目标分析时,遵循如下两个维度:
91.目标是否对自车有危险;当目标无危险时,则判断目标为安全目标,当目标有危险时;则判断目标为危险目标,且显示模块4上区别显示危险目标,同时报警模块5对危险目标发出报警;
92.若道路元素目标状态发生变化,则语音播报给驾驶员。
93.具体地,决策和控制模块3进行目标分析时判断目标对自车是否有危险,当判定目标无危险时,则判断目标为安全目标,车辆继续行驶,当判定目标有危险时,决策和控制模块3根据预先设置的处理方法进行处理,例如车辆报警;决策和控制模块3在道路元素目标状态发生变化时,例如红绿灯颜色变化或出现车辆限速标识时,将目标状态变化通过语音
播报告知驾驶员,由此,可以提高车辆行驶安全性。
94.根据本发明第一方面再进一步的实施例,目标是否对自车有危险采用目标与自车相对距离l与相对速度v的比值ttc进行判断;当ttc》=门限值1,目标为安全目标;当ttc《门限值1,目标为危险目标。具体地,计算目标与自车相对距离l与相对速度v的比值ttc,根据ttc值,划分为安全目标和危险目标,当ttc》=门限值1,目标为安全目标,当ttc《门限值1,目标为危险目标,当目标判断为危险目标,在显示模块4上区别显示危险目标,同时报警模块5对危险目标发出报警,这样,可以在危险目标出现时及时进行报警,驾驶员可以及时做出应急措施,例如刹车,保证车辆行驶的安全性,有效地避免碰撞事故的发生。
95.需要说明的是,门限值1默认设置为2.5s,门限值1的参数可以根据实际情况进行调整。
96.根据本发明第一方面再进一步的实施例,显示策略包括:
97.只显示目标选择区域内的目标;
98.区别显示危险目标与安全目标;
99.若道路元素目标状态发生变化,显示状态相应地变化;
100.根据平滑处理策略对目标属性进行平滑处理:若当前目标属性参数值与前一时刻变化值小于阈值1时,目标属性不发生变化;若当前目标属性参数与前一时刻属性值变化超过阈值1时,目标属性值更新;
101.弱势的道路参与者优先显示;
102.接收用户输入设备对目标选择需求。
103.可以理解的是,为了保证显示模块4的显示内容准确,显示模块4只显示目标选择区域内的目标,并将危险目标和安全目标进行区分,可以在颜色、亮度等方面进行区分,当道路元素目标状态发生变化,显示模块4上相应地变化,这样,驾驶员可以从显示模块4上直观快速地观察到目标选择区域内的危险情况和道路元素变化;弱势的道路参与者包括行人、骑行车和动物等,弱势的道路参与者优先显示可以保证目标选择区域内的行人、骑行车和动物等弱势的道路参与者的安全,同时减少自车碰撞事故的发生;用户可以通过用户输入设备根据自身需求对目标选择进行设置。
104.根据本发明第一方面再进一步的实施例,决策和控制模块3对危险目标和驾驶员不遵守交通规则时发出报警指令给报警模块5。这样,可以及时提醒驾驶员,保证行车的安全性,维护交通规则。
105.根据本发明第一方面再进一步的实施例,决策和控制模块3在危险目标出现、驾驶员没有按交通规则驾驶或弱势的道路参与者出现在当前车辆行驶路径中时发出报警指令,其中,决策和控制模块3发出报警指令的优先级是:危险目标出现优先于驾驶员没有按交通规则驾驶,驾驶员没有按交通规则驾驶优先于弱势的道路参与者出现在当前车辆行驶路径中。这样,在危险目标出现、驾驶员没有按交通规则驾驶、弱势的道路参与者出现在当前车辆行驶路径中这三种情况中任意一种情况出现、任意两种情况出现或三种情况全部出现时,可以及时提醒驾驶员,驾驶员可以及时采取应对措施,保证行车的安全性,决策和控制模块3根据危险程度确定报警指令的优先级。
106.需要说明的是,报警方式可以为视觉报警、触觉报警或语音报警。
107.根据本发明第一方面的一些实施例,还包括:
108.用户个性化设置模块6,用于个性化设置模块支持用户对显示目标的选择、报警类型及亮度的设置。具体地,用户个性化设置模块6和决策和控制模块3可以通过can或硬线进行信号传输,根据实际情况选择通道类型,减少了网络数据发送负载,用户通过用户个性化设置模块6根据自身习惯和需求对显示目标的选择、报警类型及亮度进行设置,操作方便快捷。
109.本发明第二方面还提出了一种动态交通场景显示方法2000。
110.如图3所示,根据本发明第二方面实施例的动态交通场景显示方法2000,包括:
111.实时探测自车前方交通信息;
112.根据自车前方交通信息识别出目标并提取目标属性;
113.根据识别出的目标及目标属性进行目标选择并对选择的目标进行目标分析,根据目标分析结果及显示策略输出目标显示信息,及根据目标分析结果判断是否需要输出报警指令;
114.根据目标显示信息对目标进行显示;
115.根据报警指令进行报警。
116.根据本发明实施例的动态交通场景显示方法2000,对自车前方交通信息进行探测,在亮度不足或能见度较低时可以准确探测自车前方交通信息,对自车前方交通信息进行识别,识别出目标并提取目标属性,根据识别出的目标及目标属性进行目标选择并对选择的目标进行目标分析,一方面根据目标分析结果及显示策略输出目标显示信息并根据目标显示信息进行显示,这样,驾驶员可以直观方便地观察自车前方交通信息,驾驶便利,另一方面根据目标分析结果判断是否需要输出报警指令并在判断需要报警的时候根据报警指令进行报警,这样,可以及时对自车前方可能出现的危险情况进行提前报警,保证行车的安全性。
117.根据本发明第二方面的一个实施例,自车前方交通信息包括前方道路信息、交通参与者信息和前方环境信息;识别出目标包括识别出道路元素目标、交通参与者目标和车外环境目标;提取目标属性包括提取道路元素目标属性和交通参与者目标属性。具体地,自车前方交通信息中的前方道路信息包括自车前方的车道线、交通灯和限速信息等,交通参与者信息包括自车前方的车辆、行人和动物信息等,前方环境信息包括自车前方的自然环境信息,感知信号道路元素的属性包括道路元素的颜色、内容和是否有危险等,交通参与者的属性包括交通参与者的位置、速度和危险性等。
118.根据本发明第二方面进一步的实施例,所述识别出目标并提取目标属性包括如下步骤:
119.接收探测到的所述自车前方交通信息;
120.对所述自车前方交通信息进行噪声滤波处理;
121.对目标进行识别和分类;
122.提取目标属性。
123.可以理解的是,探测到的自车前方交通信息中包括很多干扰信息,干扰信息会影响对自车前方交通信息的目标识别和目标属性提取效果,大大影响准确性,通过对车前方交通信息进行噪声滤波处理,大大地提高了车前方交通信息的质量,对噪声处理后的自车前方交通信息进行目标识别和分类,并对目标的属性进行提取,例如目标的位置、颜色、内
容和是否有危险等。
124.根据本发明第二方面进一步的实施例,进行目标选择时,遵循如下策略:
125.目标在以自车车头中心点为起点,前方l1米、左边l2米、右边l3米的区域内选择;交通参与者目标优先选择车辆和行人,道路元素目标优先选择交通灯和限速信息。可以理解的是,根据实际情况确定区域参数l1、l2和l3,保证探测到的车前方交通信息的质量;交通参与者目标优先选择车辆和行人,可以减少碰撞事故的发生,提高车辆行驶安全性;道路元素目标优先选择交通灯和限速信息,可以提醒车辆遵守交通规则,提高车辆行驶安全性。
126.根据本发明第二方面再进一步的实施例,进行目标分析时,遵循如下两个维度:
127.目标是否对自车有危险;当目标无危险时,则判断目标为安全目标;当目标有危险时,则判断目标为危险目标,且显示模块4上区别显示危险目标,同时报警模块5对危险目标发出报警;
128.若所述道路元素目标状态发生变化,则语音播报给驾驶员。
129.具体地,在进行目标分析时判断目标对自车是否有危险,当判定目标无危险时,则判断目标为安全目标,车辆正常行驶,当判定有危险时,则判断目标为危险目标,显示模块4上区别显示危险目标,同时报警模块5对危险目标发出报警,及时对驾驶员进行提醒提醒,保证行车安全性;在道路元素目标状态发生变化时,例如红绿灯颜色变化或出现车辆限速标识时,将目标状态变化通过语音播报告知驾驶员,由此,可以提高车辆行驶安全性。
130.根据本发明第二方面再进一步的实施例,目标是否对自车有危险采用目标与自车相对距离l与相对速度v的比值ttc进行判断;当ttc》=门限值1,目标为安全目标;当ttc《门限值1,目标为危险目标。这样,可以在危险目标出现时及时进行报警,驾驶员可以及时做出应急措施,例如刹车,保证车辆行驶的安全性,有效地避免碰撞事故的发生。
131.根据本发明第二方面再进一步的实施例,显示策略包括:
132.只显示目标选择区域内的目标;
133.区别显示危险目标与安全目标;
134.若道路元素目标状态发生变化,显示状态相应地变化;
135.根据平滑处理策略对目标属性进行平滑处理:若当前目标属性参数值与前一时刻变化值小于阈值1时,目标属性不发生变化;若当前目标属性参数与前一时刻属性值变化超过阈值1时,目标属性值更新;
136.弱势的道路参与者优先显示;
137.接收用户输入设备对目标选择需求。
138.可以理解的是,为了保证显示内容准确,只显示目标选择区域内的目标,并将危险目标和安全目标进行区分,可以在颜色、亮度等方面进行区分,当道路元素目标状态发生变化,显示状态相应地变化,这样,驾驶员可以直观快速地观察到目标选择区域内的危险情况和道路元素变化;弱势的道路参与者包括行人、骑行车和动物等,弱势的道路参与者优先显示可以保证目标选择区域内的行人、骑行车和动物等弱势的道路参与者的安全,同时减少自车碰撞事故的发生;用户可以通过用户输入设备根据自身需求对目标选择进行设置。
139.根据本发明第二方面再进一步的实施例,在危险目标和驾驶员不遵守交通规则情况下发出报警。这样,可以及时提醒驾驶员,保证行车的安全性,维护交通规则。
140.根据本发明第二方面再进一步的实施例,在当危险目标出现、驾驶员没有按交通
规则驾驶或弱势的道路参与者出现在当前车辆行驶路径中时发出报警指令,其中,发出报警指令的优先级为:危险目标出现优先于驾驶员没有按交通规则驾驶,驾驶员没有按交通规则驾驶优先于弱势的道路参与者出现在当前车辆行驶路径。
141.这样,在危险目标出现、驾驶员没有按交通规则驾驶、弱势的道路参与者出现在当前车辆行驶路径中这三种情况中任意一种情况出现、任意两种情况出现或三种情况全部出现时,可以及时提醒驾驶员,驾驶员可以及时采取应对措施,保证行车的安全性,根据危险程度确定报警指令的优先级。
142.需要说明的是,报警方式可以为视觉报警、触觉报警或语音报警。
143.根据本发明第二方面的一些实施例,还包括:支持用户对显示目标的选择、报警类型及亮度的设置。可以理解的是,用户可以根据自身习惯和需求对显示目标的选择、报警类型及亮度进行个性化设置。
144.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1