一种洗车机停车辅助系统的制作方法
1.本实用新型涉及洗车机技术领域,具体涉及一种洗车机停车辅助系统。
背景技术:
2.洗车机主要是利用电脑控制高压水自动来清洗汽车的一种机器,主要由控制系统、电路、气路、水路和机械结构构成,近年来为汽车服务行业广泛应用。
3.汽车在洗车机内的停放状态对洗车效果影响较大,如车辆倾斜停放,则不仅车辆两侧的清洗力度不同,清洗不彻底,还有可能对车漆造成损伤,因此引导车辆在洗车机内准确停车可以极大的提高洗车机的使用效果,但是目前市面的洗车机大部分是采用机械拖拽或车主自行停车为主,急需一种可以引导车辆准确停放的辅助系统。
技术实现要素:
4.为解决现有洗车机没有停车辅助系统的问题,本实用新型提供一种洗车机停车辅助系统,目的是辅助车主准确停车,使车辆准确停放于洗车机中央,保证洗车效果。
5.为了实现上述目的,本实用新型的技术方案是:
6.一种洗车机停车辅助系统,包括设置于洗车机外部的框架,还包括激光水平仪、传感器、电子屏和控制器,所述激光水平仪安装于框架上,激光水平仪的投射光线将框架内部隔成结构相同的左右两部分,传感器由第一传感器、第二传感器、第三传感器和第四传感器构成,所述第一传感器安装于框架进口的侧壁上或框架进口外侧,所述第三传感器安装于框架侧壁后端内侧或框架后壁内侧上,所述第三传感器的前方间隔状安装有位于框架侧壁内侧上的第二传感器,第二传感器和第一传感器之间的框架侧壁内侧安装有第四传感器,所述框架后壁内侧上设置有电子屏。
7.进一步地,所述激光水平仪、第一传感器、第二传感器、第三传感器、第四传感器和电子屏分别经数据线连接控制器。
8.进一步地,激光水平仪的投射光线为竖直的激光幕墙,激光幕墙的边分别与框架后壁内侧的竖直中心线、框架前侧的竖直中心线和后壁内侧的竖直中心线的下端之间的连线、框架前侧的竖直中心线和后壁内侧的竖直中心线的上端之间的连线重合。
9.进一步地,所述第一传感器、第二传感器或第三传感器均为1个或2个,第四传感器的数量为偶数。
10.进一步地,所述第一传感器、第二传感器和第三传感器均为2个且第三传感器安装于框架侧壁后端内侧时,2个第一传感器、第二传感器和第三传感器分别左右对称安装在框架左侧内壁和右侧内壁上,当第四传感器为偶数时,第四传感器分别左右对称安装在框架左侧内壁和右侧内壁上。
11.进一步地,所述电子屏带有扬声器。
12.进一步地,所述第一传感器、第二传感器、第三传感器、第四传感器均与框架底面之间有间距,当第三传感器安装于框架后壁内侧上时,第三传感器位于电子屏的下方。
13.进一步地,所述激光水平仪固定连接于框架进口的内顶面中心线前端,所述内顶面中心线为框架前侧的竖直中心线和后壁内侧的竖直中心线的上端之间的连线。
14.进一步地,所述框架为前端开口的中空长方体。
15.进一步地,第一传感器、第二传感器、第三传感器和第四传感器均为超声波传感器或距离传感器。
16.通过上述技术方案,本实用新型的有益效果为:
17.本实用新型可利用视频、语音提示和激光引导辅助车主将车辆快速准确的停到洗车机的中心,省时省力,不仅仅提升了车主停车的效率,也可提升洗车机的运营效率,无需多次修正,减少了车主长时间修正带来的燃料消耗,利于对环境的保护。
附图说明
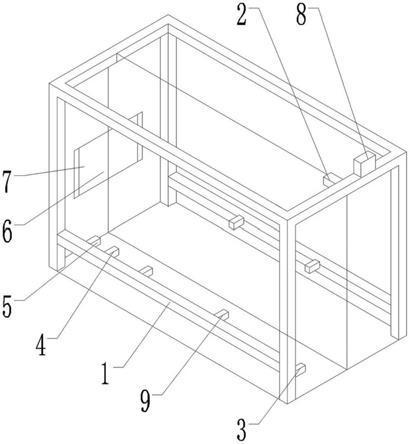
18.图1是本实用新型结构示意图。
19.附图中标号为:1为框架,2为激光水平仪,3为第一传感器,4为第二传感器,5为第三传感器,6为电子屏,7为扬声器,8为控制器,9为第四传感器。
具体实施方式
20.下面结合附图和具体实施方式对本实用新型作进一步说明:
21.如图1所示,一种洗车机停车辅助系统,包括设置于洗车机外部的框架1,还包括激光水平仪2、传感器、电子屏和控制器8,所述激光水平仪2安装于框架1上,激光水平仪2的投射光线将框架1内部隔成结构相同的左右两部分,传感器由第一传感器3、第二传感器4、第三传感器5和第四传感器9构成,所述第一传感器3安装于框架1进口的侧壁上或框架1进口外侧,所述第三传感器5安装于框架1侧壁后端内侧或框架1后壁内侧上,所述第三传感器5的前方间隔状安装有位于框架1侧壁内侧上的第二传感器4,第二传感器4和第一传感器3之间的框架1侧壁内侧安装有第四传感器9,所述框架1后壁内侧上设置有电子屏6。
22.所述激光水平仪2、第一传感器3、第二传感器4、第三传感器5、第四传感器9和电子屏分别经数据线连接控制器8。
23.激光水平仪2的投射光线为竖直的激光幕墙,激光幕墙的边分别与框架1后壁内侧的竖直中心线、框架1前侧的竖直中心线和后壁内侧的竖直中心线的下端之间的连线、框架1前侧的竖直中心线和后壁内侧的竖直中心线的上端之间的连线重合。
24.所述第一传感器3、第二传感器4或第三传感器5均为1个或2个,第四传感器9的数量为偶数。
25.所述第一传感器3、第二传感器4和第三传感器5均为2个且第三传感器5安装于框架1侧壁后端内侧时,2个第一传感器3、第二传感器4和第三传感器5分别左右对称安装在框架1左侧内壁和右侧内壁上,当第四传感器9为偶数时,第四传感器9分别左右对称安装在框架1左侧内壁和右侧内壁上。
26.所述电子屏带有扬声器7。
27.所述第一传感器3、第二传感器4、第三传感器5、第四传感器9均与框架1底面之间有间距,当第三传感器5安装于框架1后壁内侧上时,第三传感器5位于电子屏6的下方。
28.所述激光水平仪2固定连接于框架1进口的内顶面中心线前端,所述内顶面中心线
为框架1前侧的竖直中心线和后壁内侧的竖直中心线的上端之间的连线。
29.所述框架1为前端开口的中空长方体,所述框架1除前端开口外,其它面均封闭,但是为了更清晰的表现本实施例的结构,本实施例的附图1将框架1的左侧壁、右侧壁和顶面侧壁均作透明表示。
30.第一传感器3、第二传感器4、第三传感器5和第四传感器9均为超声波传感器或距离传感器。
31.本实施例中所述控制器8采用tm100c24rn施耐德plc可编程控制器,所述激光水平仪2采用sw
‑
311g型镭射自动投线激光水平仪,所述电子屏6采用55寸壁挂广告显示器或led电子屏。
32.在使用时,车主将车辆开由框架1前端驶入,当车辆驶入框架1前端时,第一传感器3感应到车辆,信号传输到控制器8,控制器8打开激光水平仪2和电子屏6,激光水平仪2投射光线到框架1内部,车辆驶入洗车机内部时光线投射在车辆引擎盖或经挡风玻璃投射到车辆内部,由于光线位于洗车机的正中心,车主可以根据投射在车身上的光线来确定车辆是否处于洗车机中心线上,可通过激光水平仪2投射在车辆引擎盖上的光线确定自己驾驶车辆所在的位置,以便用时调整车辆位置,同时第四传感器9检测车辆两侧与框架的距离,并将信号传递给控制器8,控制器8控制电子屏6在屏幕是显示车辆行驶建议或提示如:“目前车辆偏左,请向右调整”、“目前车辆正中,请缓慢进线行进”、“目前车辆偏右,请向左调整”等,到达定点停车位置后第二传感器4感应到车辆,并将信号传递给控制器8,控制器8控制电子屏6在屏幕是显示车辆行驶建议或提示如“车辆位置合适,请停车”,同时电子屏6的扬声器7也开始工作,朗读出电子屏6的屏幕显示的字,当在车辆行进过程中过于靠近洗车机的后侧内壁时,第三传感器5感应到车辆,并将信息传递到控制器8,控制器8控制电子屏6屏幕显示“车辆过于靠近,请立即停车并倒退”,同时电子屏6的扬声器7也开始工作,朗读出电子屏6的屏幕显示的字,全程无需人工辅助,并且车主可以直观的由电子屏6的屏幕中看到调整信息,听到调整建议,自动调整车辆位置,方便快捷,从而可较快速交准确的停到洗车机中心线上。
33.本实用新型可利用视频、语音提示和激光引导辅助车主将车辆快速准确的停到洗车机的中心,省时省力,不仅仅提升了车主停车的效率,也可提升洗车机的运营效率,无需多次修正,减少了车主长时间修正带来的燃料消耗,利于对环境的保护。
34.以上结合附图详细描述了本实用新型的优选实施方式,但是,本实用新型并不限于上述实施例,在不违背本实用新型的精神即公开范围内,可以对本实用新型的技术方案进行多种变形。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1