隧道牵引机ABS制动系统的制作方法
隧道牵引机abs制动系统
技术领域
1.本实用新型属于隧道掘进设备技术领域,具体涉及一种隧道牵引机abs制动系统。
背景技术:
2.近年来随着隧道掘进设备技术的日益成熟,有轨运输在隧道及地下工程施工中得以广泛使用。地铁过站避让、综合管道障碍避让、水底隧道覆土深度控制等因素增加了隧道管线的复杂程度。编组的安全运行成为新的课题。
3.机车作为盾构/tbm后配套牵引的动力源,其运行安全问题至关重要。机车编组驻车制动、行车减速、急停、坡道停车等都有制动系统参与来实现的。所以机车制动系统的安全可靠直接关系到整个编组的运行。
4.目前常见的机车制动方式如图1所示,制动系统主要有脚刹、手刹、制动气缸、主管路、拉力传感器、调节螺杆、闸瓦托、闸瓦等组成。刹车的控制方式由手刹和脚刹控制气路来实现。手刹制动方式为“断气刹”,即排气制动。当气路电磁阀断电或者拉上手刹,控制气路断气,继动阀停止给气缸供气,气缸里的空气有继动阀排出,气缸活塞杆在弹簧作用下完成复位,此时闸瓦将车轮抱死。操作脚刹行车制动作用,脚刹控制气路通气,压缩空气通过继动阀进入气缸完成活塞杆收缩抱轮动作。
5.这种刹车方式往往对司机的操作要求较高,行车刹车过猛会导致电机过载,甚至变频器报故障,导致整个编组停止运行。
6.现有技术中存在的问题是:1、铸铁闸瓦抱轮刹车将动能转化为热能,闸瓦摩擦面积小,大部分热负荷由车轮来承担。车轮踏面温度增高到一定程度时,就会使踏面磨耗、裂纹或剥离,既影响使用寿命也影响行车安全;2、隧道内运输轨道轨面经常存有油水泥沙等影响闸瓦与车轮之间的摩擦;3、刹车靠气缸弹簧制推力难以控制,存在车轮抱死现象,产生刹车失控;4、在油水较多等较差工况条件下车轮抱死时刹车距离会大幅增加;5、气路制动与电制动没有有效关联,无法避免误操作可能。
技术实现要素:
7.本实用新型目的是针对上述存在的问题和不足,提供一种隧道牵引机abs制动系统,其结构设计合理,行车制动组件和驻车制动组件分开布置,分别安装在车轮输出轴和电机输出轴端,两者相对独立,提高车辆制动稳定性,减小制动过程中车辆蛇形轨迹运行对轮缘的冲击。
8.为实现上述目的,所采取的技术方案是:
9.一种隧道牵引机abs制动系统,包括行车制动组件、驻车制动组件、气路控制系统和abs控制系统,所述行车制动组件与车轮输出轴对应装配,所述驻车制动组件与电机输出轴对应装配;
10.所述行车制动组件包括:
11.第一制动盘,其固定设置在所述车轮输出轴上;
12.第一夹紧单元,所述第一夹紧单元的夹持部与所述第一制动盘对应设置;以及
13.第一制动器,其用于驱动所述第一夹紧单元动作;
14.所述驻车制动组件包括:
15.第二制动盘,其固定设置在电机输出轴上;
16.第二夹紧单元,所述第二夹紧单元的夹持部与所述第二制动盘对应设置;以及
17.第二制动器,其用于驱动所述第二夹紧单元动作。
18.根据本实用新型隧道牵引机abs制动系统,优选地,所述第一夹紧单元和所述第二夹紧单元均包括:
19.支撑座;
20.第一制动臂;
21.第二制动臂,所述第一制动臂和所述第二制动臂的中部均铰接设置在所述支撑座上;以及
22.制动片,其设置在所述第一制动臂和所述第二制动臂的第一端部;
23.第一制动器和第二制动器均设置在对应的第一制动臂的第二端部和第二制动臂的第二端部之间。
24.根据本实用新型隧道牵引机abs制动系统,优选地,所述气路控制系统包括空压机、气源三联件、并联设置的第一储气罐和第二储气罐、以及与第一储气罐连接的主气路,所述主气路与所述第一制动器之间设置有ebs制动总阀、脚刹气路、第一差动式继动阀和气压调节器;
25.所述主气路通过第二差动式继动阀连接手刹气路,所述手刹气路分别与第一制动器和第二制动器连接,所述第二储气罐通过手刹、第一差动式制动阀与第二差动式继动阀连接,所述第一差动式继动阀与气压调节器之间的连接管路上设置有与所述第二差动式继动阀连接的第一分支气路。
26.根据本实用新型隧道牵引机abs制动系统,优选地,所述abs控制系统包括:
27.abs控制器;以及
28.轮速传感器,其用于检测和采集轮速信号,并传递至abs控制器中;所述abs控制器通过轮速信号,控制所述气压调节器实现系统压力适配。
29.根据本实用新型隧道牵引机abs制动系统,优选地,还包括紧急制动阀,所述紧急制动阀的第一端口与所述第二储气罐连接;所述第一分支气路与所述脚刹气路之间设置有第二分支气路,所述紧急制动阀的第二端口与所述第二分支气路通过梭阀连接;所述第一差动式继动阀与主气路之间并联设置有第三分支气路和第四分支气路,在所述第四分支气路上设置有第二差动式制动阀。
30.根据本实用新型隧道牵引机abs制动系统,优选地,所述第一制动盘通过固定套管安装在所述车轮输出轴上,所述第二制动盘固定在所述电机输出轴的联轴器上。
31.采用上述技术方案,所取得的有益效果是:
32.1、本申请整体结构设计合理,其通过将行车制动组件和驻车制动组件分开布置,分别安装在车轮输出轴和电机输出轴端,使得两者相对独立,更便于进行控制。
33.2、本申请采用盘式制动结构,消除制动对轮毂磨损,延长车轮的使用寿命,提高了制动效果;
34.3、本申请防止制动过程中直接控制车轮的抱死,车轮沿轨道滑移失控,实现柔性刹车,减轻制动过程中的冲击和振动,降低不适感;
35.4、本申请采用模块化设计,制动结构紧凑,有效释放机车内部空间,方便拆装维修更换,大大降低了维护成本,提高维护效率;
36.5、本申请通过控制调节阀对趋于抱死的车轮制动力进行调整,使车轮的滑移率控制在纵向附着系数最大值附近,制动力和横向附着力较大,制动距离短,横向稳定性好;提高车辆制动稳定性,减小制动过程中车辆蛇形轨迹运行对轮缘的冲击;
37.6、本申请还能够实现紧急制动,在紧急制动工况下,减少脚制动的操作,防止驾驶员手忙脚乱。
附图说明
38.为了更清楚地说明本实用新型实施例的技术方案,下文中将对本实用新型实施例的附图进行简单介绍。其中,附图仅仅用于展示本实用新型的一些实施例,而非将本实用新型的全部实施例限制于此。
39.图1为现有技术中的机车制动结构示意图。
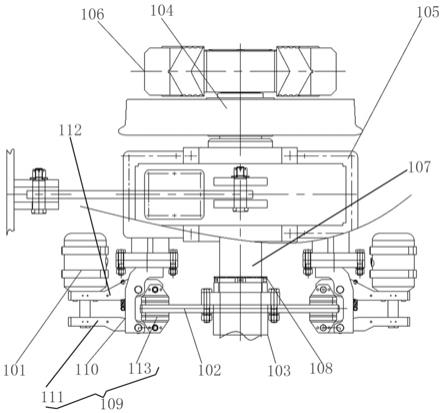
40.图2为根据本实用新型实施例的行车制动组件的结构示意图。
41.图3为根据本实用新型实施例的驻车制动组件的结构示意图。
42.图4为根据本实用新型实施例的气路控制系统图。
43.图中序号:
44.101为第一制动器、102为第一制动盘、103为固定套筒、104为车轮、105为减速机、106为轮对支撑、107为车轮输出轴、108为感应齿圈、109为第一夹紧单元、110为支撑座、111为第一制动臂、112为第二制动臂、113为制动片;
45.201为第二制动器、202为第二制动盘、203为电机输出轴、204为联轴器、205为第二夹紧单元;
46.301为手刹、302为压力表、303为第一制动器、304为第一储气罐、305为第二储气罐、306为气源三联件、307为空压机、309为紧急继动阀、309为第二制动器、310为梭阀、311为气压调节器、312为脚刹、313为主气路、314为脚刹气路、315为手刹气路、316为第一差动式继动阀、317为第二差动式继动阀、318为第一式差动式制动阀、319为第二式差动式制动阀、320为第一分支气路、321为第二分支气路、322为第三分支气路、323为第四分支气路、324为ebs制动总阀。
具体实施方式
47.下文中将结合本实用新型具体实施例的附图,对本实用新型实施例的示例方案进行清楚、完整地描述。除非另作定义,本实用新型使用的技术术语或者科学术语应当为所属领域内具有一般技能的人士所理解的通常意义。
48.在本实用新型的描述中,需要理解的是,“第一”、“第二”的表述用来描述本实用新型的各个元件,并不表示任何顺序、数量或者重要性的限制,而只是用来将一个部件和另一个部件区分开。
49.应注意到,当一个元件与另一元件存在“连接”、“耦合”或者“相连”的表述时,可以
意味着其直接连接、耦合或相连,但应当理解的是,二者之间可能存在中间元件;即涵盖了直接连接和间接连接的位置关系。
50.应当注意到,使用“一个”或者“一”等类似词语也不必然表示数量限制。“包括”或者“包含”等类似的词语意指出现该词前面的元件或物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
51.应注意到,“上”、“下”、“左”、“右”等指示方位或位置关系的术语,仅用于表示相对位置关系,其是为了便于描述本实用新型,而不是所指装置或元件必须具有特定的方位、以特定的方位构造和操作;当被描述对象的绝对位置改变后,则该相对位置关系也可能相应的改变。
52.参见图2
‑
图4,本申请公开了一种隧道牵引机abs制动系统,包括行车制动组件、驻车制动组件、气路控制系统和abs控制系统,行车制动组件与车轮输出轴对应装配,驻车制动组件与电机输出轴对应装配,二者相对独立。
53.本申请的方案设计中改变了原有的制动方式,引入气压盘式制动和abs控制系统,有效改善了车辆制动问题,实现牵引机车编组稳定可靠运行和驻车。在设计制动机构上采用模块化,结构更加紧凑,并尽可能释放机车内部空间,方便安装拆卸。
54.本实施例中,行车制动组件包括第一制动盘102、第一夹紧单元109和第一制动器101,第一制动盘102固定设置在车轮输出轴107上;第一夹紧单元109的夹持部与第一制动盘102对应设置;第一制动器101用于驱动第一夹紧单元动作;驻车制动组件包括第二制动盘202、第二夹紧单元205和第二制动器201,第二制动盘202固定设置在电机输出轴203上;第二夹紧单元205的夹持部与第二制动盘对应设置;第二制动器201用于驱动第二夹紧单元动作。
55.本申请中的第一夹紧单元109和第二夹紧单元205均包括支撑座110、第一制动臂111、第二制动臂112和制动片113,支撑座固定在减速器上,第一制动臂111和第二制动臂112的中部均铰接设置在支撑座110上;制动片113设置在第一制动臂111和第二制动臂112的第一端部;第一制动器111和第二制动器112均设置在对应的第一制动臂111的第二端部和第二制动臂112的第二端部之间。同时第一夹紧单元和第二夹紧单元内还设置有补偿螺钉、复位弹簧等部件,在车轮输出轴上还设置有感应齿盘,在感应齿盘侧边设置有感应器,用于检测轮轴的即刻角速度并传输到控制器。
56.当机车编组在运行过程中需要刹车时,通过脚刹控制压缩空气进入行车制动组件的第一制动器内,使得第一夹紧单元动作,第一制动盘被抱住刹车。
57.驻车制动时,当机车驻车以后司机通过手刹操作杆完成断气操作,第二制动器内气体通过差动继动阀排出,第二制动器内弹簧复位,第二夹紧单元动作,制动盘被抱住刹车完成电机轴抱死。
58.进一步地,本申请中气路控制系统包括空压机307、气源三联件306、并联设置的第一储气罐304和第二储气罐305、以及与第一储气罐304连接的主气路313,主气路与第一制动器之间设置有ebs制动总阀324、脚刹气路314、第一差动式继动阀316和气压调节器311;主气路313通过第二差动式继动阀317连接手刹气路315,手刹气路315分别与第一制动器101和第二制动器201连接,第二储气罐305通过手刹301、第一差动式制动阀318与第二差动式继动阀317连接,第一差动式继动阀316与气压调节器311之间的连接管路上设置有与第
二差动式继动阀317连接的第一分支气路320。
59.进一步地,本申请abs控制系统包括abs控制器和轮速传感器,轮速传感器用于检测和采集轮速信号,并传递至abs控制器中;abs控制器通过轮速信号,控制气压调节器实现系统压力适配。
60.还包括紧急制动阀,紧急制动阀的第一端口与第二储气罐连接;第一分支气路与脚刹气路之间设置有第二分支气路321,紧急制动阀的第二端口与第二分支气路通过梭阀310连接;第一差动式继动阀316与主气路313之间并联设置有第三分支气路322和第四分支气路323,在第四分支气路323上设置有第二差动式制动阀319。
61.本申请全列车气路采用双回路设计,通过不同的储气罐分别对机车驻车及拖挂车制动和机车行车制动管路分别供气,可实现在其中一个回路出现漏气时,另一回仍能够制动。详见气路布置图4。
62.①
机车行车制动:
63.由踏板制动采用ebs制动总阀,采集驾驶者的制动需求,发送给主控plc。为保证前后车轴制动的同步性,ebs制动总阀21和22口并联输出气压控制信号,气压控制信号经由脚刹气路分别进入前后车轴附近的第一差动式继动阀的41口,由第一差动式继动阀2口比例输出制动压力至气压调节器,气压调节器根据abs ecu的控制指令对制动压力进行调节,并分别输出至第一制动器的行车制动腔,实现车轮的制动力大小的控制。
64.②
机车驻车制动:
65.通过手制动阀21口输出的气压控制信号(增压和泄压),进入第二差动式继动阀的41口,控制第二差动式继动阀2口增压或减压,并通过手刹气路控制4个车轮的第一制动器和电机的第二制动器的驻车制动腔的增压和泄压。采用差动式继动阀可避免手制动阀在拉起状态时,驾驶者同时施加脚制动,导致制动气室推杆受力过大变形或寿命减少。其原理是:在进行行车制动时,控制行车制动的第一差动式继动阀2口压力,通过三通分至第二差动式继动阀42口,控制其2口输出压力至制动气室驻车制动腔解除弹簧制动。
66.③
紧急制动分两种工况:行车紧急制动和断电紧急制动。行车紧急制动由驾驶者主观判断紧急事件的发生,决定是否需要触发操作台面的急停开关。急停开关触发后第二差动制动阀通电,接通主气路与第一差动式继动阀42口的通道,机车和拖挂车行车制动将以前文所述的控制方式,施加最大的制动力来进行制动;断电制动是指机车在全车断电时,通过第一差动制动阀控制各继动阀释放制动气室驻车制动腔的压力,来实现弹簧制动。
67.abs控制系统主要由abs控制器、气压调节器和轮速传感器等,附件有信号灯、诊断开关、保险、压力表等。轮速传感器主要由齿圈、传感器、弹性衬套、传感器支架等构成,可检测和采集系统的轮速信号,并以线束的形式传递到abs控制器中,通过分析、处理,气压调节器收到相关信号,调节系统压力,实现压力适配调节。其中整机控制系统电压为24v,保证整个工作过程的操作安全。
68.abs系统原理:当驾驶员踩制动踏板时,气压通过制动总阀流入前、后车轮的第一制动器的制动气室,随着压力的增加,制动器制动力矩增加,车轮减速,在这一过程中,车轮上abs传感器测量每个车轮的角速度,它以脉冲的形式输出,脉冲频率与车轮角速度成正比。车轮角速度信号被采集传递到控制器中。控制器根据四个车轮的角速度计算出角加/减速度,测算车辆参考速度,计算出参考滑移率,并由此计算出所需的制动气室气压力,通过
控制器i/o端口,将它变为控制电磁阀的控制命令。这样制动气室的压力则能根据路面情况而控制,这种压力恰使车轮能工作在最佳的附着系数区域,即峰值附着系数附近。
69.由此可见,一但车轮有抱死趋势时,制动压力将由电磁阀(即气压调节器)进行控制,但这时电磁阀入口的气压是由双腔制动阀来控制的,如果驾驶员不踩踏板或踏板力不够,电磁阀入口就会没有气压或比较小的气压,这样电磁阀就没有充足的气压进行abs控制。所以要使abs能正常工作,必须要求驾驶员全力踩踏板。而这种情况只能在紧急制动的情况下才能出现。
70.因此,当遇到紧急情况时,驾驶员必须将制动踏板踩到底即车辆全力制动,才能充分发挥abs的作用。
71.本申请优化设计一种隧道牵引机车abs系统装置,改变传统的制动方式,优化引进气压盘式制动器加装abs防抱死系统装置,有效解决了在制动过程中,机车出现制动抱死、失控及车轮闸瓦磨损严重等不良现象,实现牵引机车编组安全稳定、可靠运行和驻车。
72.上文已详细描述了用于实现本实用新型的较佳实施例,但应理解,这些实施例的作用仅在于举例,而不在于以任何方式限制本实用新型的范围、适用或构造。本实用新型的保护范围由所附权利要求及其等同方式限定。所属领域的普通技术人员可以在本实用新型的教导下对前述各实施例作出诸多改变,这些改变均落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1