无焊缝车辆悬架控制臂的制作方法
无焊缝车辆悬架控制臂
1.相关申请的交叉引用
2.本技术要求2019年9月5日提交的美国临时申请第62/896,303号和2020年2月21日提交的美国临时申请第62/979,532号的优先权,这些申请以引用的方式并入到本文中。
技术领域
3.本发明涉及汽车部件领域,特别涉及汽车悬架控制臂。
背景技术:
4.大多数现代道路车辆使用某种形式的悬架系统来隔离乘客舱免受路面崎岖不平引起的车轮扰动。这些悬架系统通常包括某种形式的能量存储介质如弹簧、控制弹簧运动的设备如阻尼器以及控制车轮移动的运动学状态的联动布置。这种部件组合被配置为允许车辆的车轮以受控的方式向前移动并经过道路的崎岖不平处。最常见的联动布置形式是四杆联动配置,由主轴组件、车体和两个通常称为控制臂的枢转结构元件构成。
5.图1说明了一种常见的现有技术四杆联动配置。“a”形控制臂1、2定位并引导主轴组件3相对于车体4的移动。主轴组件承载着车轮、轮胎、轴承组件和制动组件,统称为车辆的簧下质量5。簧下质量还包括控制臂重量的一部分。由于在路面扰动中移动簧下质量所涉及的能量很大,因此优选尽可能多地减少该子组件的组合重量。此外,由于车辆的操纵特性直接依赖于簧下部件的受控移动,因此控制臂必须具有足够的刚度和强度以抵抗施加在它们上的大量载荷。
6.因此,重要的是悬架控制臂要坚固和刚硬,以便在加载时发挥良好的功能,以及重量轻,以减轻簧下质量。减轻重量通常会导致强度和刚度的降低。设计重量减轻但性能特性相当的零件需要很有创造性。施加在悬架控制臂上的操作载荷是离散的,并且可以很好地理解,因此可以开发非均匀结构,以在应用所需的方向和位置上提供选择性的刚度和强度。车辆悬架控制臂在平面图中通常配置为“a”形或“l”形,这取决于车身安装架与主轴的关系的配置。在任何一种情况下,主要的诱导载荷都在“a”或“l”构型的平面上,因此需要在“a”或“l”构型的边缘周围有高度集中的材料,以最大限度地提高平面内断面二次矩值。
7.对优化控制臂结构为非均匀形状的要求推动了许多复杂制造过程的使用。与车辆控制臂构造相关联的最常见的制造方法是将压制成型的金属冲压件铸造、锻造和焊接成子组件。由于所涉及的复杂形状,很难用简单的压制成型的金属冲压件制造出优化的车辆控制臂。
8.图2示出了常见现有技术铸造或锻造的“l”形控制臂6。
9.铸造需要高热来形成熔融金属。虽然可以形成精确的形状,但控制臂往往是实心的,伴随着显著的重量。铸造的控制臂虽然坚固,但往往有点脆。铸造过程比其他制造过程更昂贵。虽然铝比钢轻,耐腐蚀,但它要贵得多。
10.锻造涉及将金属加热到具有延展性的程度,然后施加很大的压力迫使软金属成期望的形状。与铸造一样,锻造件是实心的。虽然锻造件往往比铸造件具有更大的抗拉强度,
但由于需要大量的热量,而且往往会有大量的废料,因此该过程也是昂贵的。铝有适合于锻造,但大量的废料增加了成本,尽管废料很容易被回收利用。
11.大多数悬架控制臂在其构造上采用压制成型的金属冲压件,被配置为闭合的箱形截面。图3示出了由两个u形压制成型的金属冲压件501、502构成的典型现有技术悬架控制臂的截面。这种类型的结构截面通常需要大量的材料重叠,以便于所需的填角焊缝接头。这种材料重叠最终在结构上是冗余的,可能会导致比替代铸造或锻造配置更重的解决方案。如果使用对接构造,没有材料重叠,用于形成接头的焊接的强度和完整性就更加关键,零件也更难制造。
12.虽然单件控制臂可以由基本上u形结构的金属钢板制成,但需要相对较重型钢来处理控制臂所承受的大量载荷。较重的零件通常是不期望的,额外的材料成本可能高得令人望而却步。此外,u形结构使得很难在“a”或“l”构型边缘周围定位高度集中的材料,以最大限度地提高平面内断面二次矩值。
13.图4示出了一个典型的现有技术控制臂,其中两个压制成型的金属冲压件焊接在控制臂的大部分周边周围。第一冲压件7和第二冲压件8如图3所示焊接。
14.悬架控制臂承受两个主要方向的载荷,即前后(fore-aft)和车横向(cross car)。为了抵抗诸如加速和制动等前后载荷,控制臂通常需要一套衬套和球形接头。在现代车辆悬架系统中,通常希望在前后方向上具有相对柔软的悬架,以允许车轮在例如撞击路边时提供凹进运动。这缓冲了撞击。这是通过有相对刚硬的前橡胶衬套和柔软的后衬套来实现的。相比之下,通常希望在车辆横向方向上具有相对刚硬的悬架,以便于在绕弯道行驶时正确地跟踪车辆。这是通过有相对刚硬的前衬套且后衬套不影响这种行为来实现的。刚硬的前衬套与球形接头对齐,球形接头从车轮传递牵引载荷。刚硬的前衬套一般称为操纵衬套,柔软的后衬套一般称为骑行衬套。
15.上述控制臂通常使用安装在球形接头支架9中的球形接头和一对衬套10、11连接到簧下质量和车辆。使用上述技术生产的大多数现有技术控制臂的缺点是,如图4所示,在转向节端用于球形接头的孔必须焊接到控制臂上,或者该孔必须冲压到压制成型件中,从而产生额外的步骤,破坏金属板和产生额外的废料。衬套的座必须与控制臂连接,通常通过焊接连接。这就产生了额外的焊接步骤,有可能导致衬套座不对准或焊接缺陷。
16.焊接过程往往会破坏金属板上的防腐涂层,从而使零件在焊缝处暴露于腐蚀。虽然有些零件可以在焊接后电镀一层保护涂层,但对于较大的、形状不规则的零件来说,这通常是困难的。一个零件的焊后电镀是昂贵的,需要额外的加工时间和占地面积。此外,焊接可能会导致在沿焊缝的各个点上强度不均匀的接头。由于控制臂通常在车辆运动时承受持续的应力,焊接不规则可能导致焊缝处的应力失效。焊接接头的疲劳性能通常比无接头的金属零件更差。此外,焊接过程沿焊缝两侧产生热影响区,该热影响区通常表现出比金属板的其余部分更低的强度,从而降低了零件的整体强度。现代焊接技术涉及机器人、焊接单元、焊丝和伴随的基础设施,包括焊后检查,所有这些都增加了制造成本。焊接还对焊接区域的空气品质产生不利影响,并消耗大量电力。
技术实现要素:
17.因此,有利的是使用诸如金属板压制成型的低成本制造技术来形成悬架控制臂,
悬架控制臂能够提供高固有刚度和强度同时保持相对低质量。已经证明,对于大体积的应用,如汽车工业所限定的应用,金属板压制成型是制造结构部件最经济有效的方法。目前生产的大多数车辆采用的车身结构和选定的副车架几乎完全由使用压制成型技术制造的铝或钢冲压件构成。因此,本发明的目的是在车辆悬架控制臂的制造中利用金属压制成型。
18.使用相对轻的、预涂的金属钢板而不使用焊接来生产控制臂也是有利的。此外,减少器械和占地面积的资本成本、减少材料和能量成本、减少检查费用、减少零件疲劳以及由于零件重量较轻而提高车辆性能和燃料效率,都将是有益的。
19.在本发明的一个实施例中,包括车辆悬架控制臂的结构元件由一对复杂的单件金属板冲压部件构成,这对金属板冲压部件由均匀厚度的材料形成。部件无需焊接就联结形成正确的平面图形状,即“a”、“l”或其他适合具体应用的形状。
20.在本发明的一个主要方面,一种车辆悬架控制臂,包括:由金属板形成的第一臂部件和第二臂部件,每个臂部件包括外壁和两个侧壁、邻近第一端的衬套连接装置,邻近第二端的至少一个支架接纳铆钉孔、位于第一端与第二端之间的至少一个部件连接铆钉孔;骑行衬套和操纵衬套;球形接头支架,球形接头支架包括支架铆钉孔,支架铆钉孔对应于邻近第一臂部件和第二臂部件中的每一个的第二端的至少一个支架接纳铆钉孔;以及多个铆钉,使得当构造时,球形接头支架经由至少一个支架接纳铆钉孔和相对应的支架铆钉孔在邻近第一臂部件的第二端和第二臂部件的第二端处铆接到第一臂部件和第二臂部件,骑行衬套连接在第一臂部件的第一端,操纵衬套连接在第二臂部件的第一端。
21.在本发明的另一个方面,一种车辆悬架控制臂还包括由:金属板形成的第三臂部件,该第三臂部件包括外壁和两个侧壁、两个端部,每个端部包括至少一个第三臂部件铆钉孔;骑行衬套座部件和操纵套筒座部件,其中第三臂部件适于在邻近第一臂部件和第二臂部件的第一端处铆接到第一臂部件和第二臂部件中每一个,并且在邻近第三臂部件的相应端部处铆接到骑行衬套座部件和操纵衬套座部件。
22.在本发明的另一个方面,一种车辆悬架控制臂,包括:由金属板形成的第一臂部件和第二臂部件,每个臂部件包括外壁和两个侧壁、邻近第一端的一体式衬套座接纳孔、邻近第二端的至少一个支架接纳铆钉孔、位于第一端与第二端之间的至少一个部件连接铆钉孔;杆,杆包括在第一端处的骑行衬套座、在第二端处的操纵衬套座以及第一接触表面和第二接触表面,该第一接触表面和第二接触表面位于座的内部并沿着杆邻近座,当相应的座延伸穿过座接纳孔时,第一接触表面和第二接触表面适于接触第一臂部件和第二臂部件;球形接头支架,包括支架铆钉孔,支架铆钉孔对应于邻近第一臂部件的第二端和第二臂部件的第二端处的支架接纳铆钉孔;以及多个铆钉,使得当构造时,骑行衬套座延伸穿过第一部件的座接纳孔,操纵衬套座延伸穿过第二部件的座接纳孔,第一臂部件和第二臂部件接触杆的第一接触表面和第二接触表面,球形接头支架经由支架接纳铆钉孔和相对应的支架铆钉孔在邻近第一臂部件的第二端和第二臂部件的第二端处铆接到第一臂部件和第二臂部件,第一臂部件在相对应的至少一个臂部件连接铆钉孔处铆接到第二臂部件。
23.在本发明的另一个方面,第一臂部件的侧壁和第二臂部件的侧壁部分重叠并在其第一端处保持间隔开。
24.在本发明的另一个方面,至少一个间隔件在至少一个臂部件铆钉孔处保持第一臂部件的侧壁和第二臂部件的侧壁之间的间距。
25.在本发明的另一方面,第一臂部件和第二臂部件在三个臂部件铆钉孔处铆接。
26.在本发明的另一个方面,三个臂部件铆钉孔中的一个位于邻近臂部件的第二端处,球形接头支架在所述铆钉孔处铆接到第一臂部件和第二臂部件中的每一个。
27.在本发明的另一个方面,衬套连接装置包括邻近第一臂部件和第二臂部件中的每一个的第一端的一体式衬套螺柱接纳孔,并且其中控制臂还包括杆,杆包括在第一杆端处的骑行衬套螺柱、在第二杆端处的操纵衬套螺柱以及邻近螺柱沿着杆位于内部的第一支座表面和第二支座表面,当相应的螺柱延伸穿过衬套螺柱接纳孔时,第一支座表面和第二支座表面适于接触第一臂部件和第二臂部件,使得当构造时,骑行衬套螺柱延伸穿过第一臂部件的衬套螺柱接纳孔,操纵衬套螺柱延伸穿过第二臂部件的衬套螺柱接纳孔,并且第一臂部件和第二臂部件分别接触杆的第一支座表面和第二支座表面。
28.在本发明的另一个方面,杆是管状的。
29.在本发明的另一个方面,骑行衬套包括铆接到第一臂部件的第一端的支架。
30.在本发明的另一个方面,操纵衬套通过与加强板冲压件接触而稳定,加强板冲压件邻近第二臂部件的第一端铆接到第一臂部件和第二臂部件中的至少一个。
31.在本发明的另一个方面,第二衬套螺柱具有内螺纹以接受相对应的外螺纹紧固件,并包括外部操纵衬套座、在第二衬套螺柱上形成为肩部的外部第二接触表面和锥形部分,并且控制臂还包括成形环,该成形环装配在第二衬套螺柱上并安放在锥形部分上,以在操纵衬套紧固到第二衬套螺柱时将第二臂部件保持在第二接触表面上。
附图说明
32.图1是现有技术四杆联动车辆悬架系统的透视图。
33.图2是现有技术铸造或锻造悬架控制臂的透视图。
34.图3是由两个u形压制成型金属冲压件构成的典型现有技术焊接悬架控制臂的横截面立面图。
35.图4是由两个u形压制成型金属冲压件构成的典型现有技术焊接悬架控制臂的透视图。
36.图5是本发明的非焊接悬架控制臂的主要实施例的部件的透视分解图。
37.图6是本发明的非焊接悬架控制臂的部分分解和部分组装的透视图。
38.图7是图5的部分组装的非焊接悬架控制臂的透视图。
39.图8是图7的非焊接悬架控制臂的透视图,其中衬套示出为预先组装到控制臂上。
40.图9是图8的非焊接悬架控制臂的透视图,其中衬套和球形接头已组装。
41.图10是本发明的非焊接悬架控制臂的替代主要实施例的平面图。
42.图10a是沿图10的线10a-10a截取的截面图。
43.图10b是沿图10的线10b-10b截取的截面图。
44.图11a是本发明的非焊接悬架控制臂的另一替代实施例的透视图。
45.图11b是图11a的非焊接悬架控制臂的一部分的透视图。
46.图11c是图11a的控制臂的特定部件的透视分解图;
47.图12a是图11a的替代实施例的透视图,其中第三臂部件的取向颠倒。
48.图12b是图12a的非焊接悬架控制臂的一部分的透视图。
49.图13是图11a的控制臂的透视图,该控制臂具有组装的衬套和球形接头。
50.图14是图5至图9的第一实施例的杆的立面剖视图。
51.图15是图5至图9的铆接非焊接悬架控制臂的透视图,示出了成形环的组装。
52.图16a是图15的控制臂的透视图,准备组装衬套。
53.图16b是图15和图16的控制臂的一部分的立面剖面图,其中操纵衬套组装到控制臂上。
具体实施方式
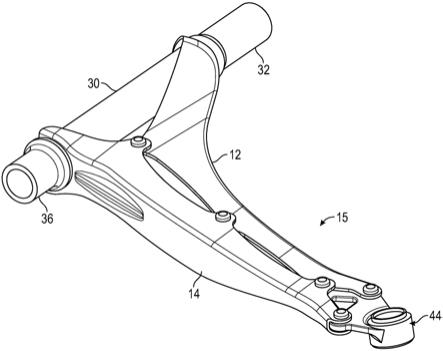
54.图5至图9示出了本发明的无焊缝车辆悬架控制臂15的优选实施例。第一臂部件12和第二臂部件14由金属板冲压而成。优选材料是为了防腐预先涂覆的钢板。给定这种构造的性质,通常可以使用与如图3和图4所示的相对应的现有技术焊接构造相比更轻型的金属板。
55.第一臂部件12和第二臂部件14具有某些共同特征。每一个臂部件包括外壁16和两个侧壁18。每个臂部件具有邻近臂部件的第一端22的一体式衬套座接纳孔20。通过适当的冲压,孔20由构成臂部件其余部分的相同材料形成,而不需要像现有技术制造中典型的那样焊接或以其他方式将带有衬套座的单独部件附连到控制臂上。此外,每个臂部件12、14包括邻近臂部件的第二端26的至少一个支架接纳铆钉孔24。在图5的优选实施例中,在冲压过程中在每个臂部件中形成两个对准的支架接纳孔24。此外,每个臂部件包括位于第一端22与第二端26之间的至少一个部件连接铆钉孔28。在图5的优选实施例中,每个臂部件12、14包括三对对准的部件连接铆钉孔28。
56.杆30用于在臂部件12、14之间提供非铆接连接。它还替换了如衬套座的分立部件,原本这些部件必须焊接或以类似方式附连到控制臂上,如下文进一步讨论。杆30优选地是管状的,以减轻控制臂的重量,尽管它可以是实心的。杆30包括在第一端34处的第一螺柱31和在第二端38处的第二螺柱33,第一螺柱31具有骑行衬套座32,第二螺柱33具有操纵衬套座36。这些衬套座32、36用于接受衬套,如下文进一步讨论。杆30还包括相对于杆的第一端34和第二端38位于内部的第一接触表面40和第二接触表面42。这些接触表面40、42设计成在组装控制臂时在衬套座接纳孔20处接触第一臂部件12和第二臂部件14。
57.球形接头支架44适于接纳球形接头,如下文进一步讨论。球形接头支架44包括支架铆钉孔46,支架铆钉孔46对应于邻近第一臂部件12的第二端26和第二臂部件14的第二端26的支架接纳孔24。在图5所示的优选实施例中,两个外部支架铆钉孔46分别与第一臂部件12和第二臂部件14中的每一个上的一对支架接纳铆钉孔24对准。内部支架铆钉孔46与邻近臂部件12、14的第二端26的成对部件连接孔28对准。因此,邻近臂部件12、14的第二端26的成对部件连接孔28既用于两个臂部件彼此连接,又用于球形接头支架44与两个臂部件连接。
58.如图6所示,多个铆钉48用于在各个支架接纳铆钉孔24、部件连接铆钉孔28和支架铆钉孔46处联结各个部件。
59.间隔件50可用于在组装之前和组装期间保持臂部件12、14的稳定性。如图5所示,间隔件50在组装之前位于第一臂部件12中的部件连接铆钉孔28处,尽管任一臂部件都可以接纳它们。当组装控制臂时,间隔件50保持臂部件中每一个臂部件的侧壁18之间的间距。
60.在优选的组装顺序中,在冲压第一臂部件12和第二臂部件14之后,间隔件50与第一臂部件12中的位于中央的部件连接铆钉孔28对准地安装,部件连接铆钉孔28相对于车辆通常朝向后。下面的顺序可能同时发生,也可能以紧密的顺序发生。杆30的螺柱31的骑行衬套座32穿过第一部件12的衬套座接纳孔20插入,并且杆30的第一接触表面40接触第一臂部件12。螺柱33的操纵衬套座36穿过第二部件14的衬套座孔20插入,并且第二接触表面42接触第二臂部件14。第一臂部件12和第二臂部件14在部件连接铆钉孔28处重叠对准。球形接头支架44在邻近臂部件的第二端26处在支架接纳铆钉孔24、支架铆钉孔46和部件连接铆钉孔28处与第一臂部件12和第二臂部件14对准。图6示出了在此时部分组装的控制臂。然后安装铆钉48以完成基本控制臂15,如图7所示。所示的优选实施例的结构的优点是铆钉48可以安装在单个平面中,从而显著地简化了组装。另外的一个或多个配件(未示出)可用于将杆30固定到组装的控制臂15上。
61.在基本控制臂15的构造之后,骑行衬套52可以安装在骑行衬套座32上,而操纵套筒54可以安装在操纵衬套座36上。安装可以通过将衬套52、54压配到衬套座32、36上来进行。这是在图8中示出的衬套的预先组装。球形接头56也可以使用标准方法在球形接头支架44处连接到控制臂15。图9中示出了包括衬套52、54和球形接头56的完全组装的控制臂。显然,可以适当地采用其他已知的方法来组装控制臂、衬套和球形接头。
62.图10中示出了控制臂结构的第二主要实施例。在这种情况下,消除杆30。同样,多个铆钉被用于联结各种部件。该实施例在特定应用中可能是有益的,例如在悬架系统内的控制臂的“包装”要求决定控制臂的不同周长轮廓的情况下。消除杆30还可导致零件的质量和成本降低,只要保持足够的零件耐久性和功能性,这通常是合乎需要的。
63.参照图10-图10b,控制臂115由第一臂部件112和第二臂部件114构成。这些部件还以截面图示意性地图示以示出具有外壁和两个侧壁的臂部件的典型u形形状。第二臂部件114的侧壁比第一壁部件112的侧壁彼此更靠近地间隔开,以允许第二臂部件114部分地嵌套在第一臂部件112内。球形接头支架144适于接纳球形接头。
64.球形接头支架144包括支架铆钉孔146,该支架铆钉孔146对应于邻近第一臂部件112的第二端126和第二臂部件114的第二端126的支架接纳孔124。两个外部支架铆钉孔146分别与第一臂部件112和第二臂部件114的每一端上的一对支架接纳孔124对准,尽管可以做出其他连接选择。因此,邻近臂部件的第二端126的成对部件连接孔128既用于将两个臂部件彼此连接,又用于将球形接头支架144连接到两个臂部件。
65.包括骑行衬套支架158的骑行衬套152在一个或多个衬套支架孔160和一个或多个第一臂部件衬套支架接纳孔162处铆接到第一部件112的第一端122。操纵衬套154可以常规地紧固到第二臂部件114的第一端122。加强金属板冲压件164可以在一个或多个孔166、168处铆接到第一部件和第二部件。加强金属板冲压件164接触操纵衬套154并用于稳定操纵衬套154。当然,加强件可以通过非金属板冲压的方式制造,但是使用金属板冲压件与形成整个控制臂的过程是一致的,并且将具有这些过程附带的益处。
66.图11a至图13示出了本发明的另一主要实施例。该实施例类似于图5至图9所示的控制臂的构造,除了联结第一臂部件和第二臂部件的杆被替换为第三臂部件,第三臂部件包括金属板冲压件,金属板冲压件的形状在其外壁和两个侧壁方面类似于第一臂部件和第二臂部件。代替由第一臂部件和第二臂部件的金属板材料形成衬套座孔,分立的衬套座部
件与第三臂部件一起铆接到第一臂部件的第一端和第二臂部件的第一端,以形成准备接纳衬套的坚固的铆接结构。衬套座部件可以由金属板或其他方便的材料形成。
67.在图11a至图13的实施例中,第一臂部件212和第二臂部件214由金属板冲压而成。第一臂部件212和第二臂部件214具有某些共同特征。每个臂部件212、214包括外壁216和两个侧壁218。此外,每个臂部件212、214包括邻近臂部件的第二端226的至少一个支架接纳铆钉孔224。臂部件212、214在它们的第二端和在中央处连接,如已经关于图5至图9的实施例描述的第一实施例中那样。第一实施例与该另一实施例之间的差异体现在臂部件212、214的第一端处。每个臂部件212、214包括邻近第一臂部件的第一端和第二臂部件的第一端的至少一个附加部件连接铆钉孔229。在图11a至图13的优选实施例中,每个第一臂部件212和第二臂部件214包括一对附加的连接铆钉孔229。
68.第三臂部件230用于提供与第一臂部件212和第二臂部件214的铆接连接。与第一臂部件和第二臂部件一样,第三臂部件构造有外壁和两个侧壁。第三臂部件230包括邻近其每一端的至少一个第三臂铆钉孔231,以与第一臂部件212和第二臂部件214的至少一个附加的部件连接铆钉孔229对准。如图12a和图12b所示,第三臂部件230可沿与图11a和图11b所示实施例的方向相反的方向定向。当铆接在这些孔处时,第一臂部件212和第二臂部件214、第三臂部件230以及骑行衬套座部件232和操纵衬套座部件236都牢固地连接。当用紧固件固定时,帽238用于将操纵衬套保持在操纵衬套座236上。在第一臂部件212和第二臂部件214之一的侧壁之间以及在第三臂部件230的侧壁之间在各个铆钉孔的位置处可以同样采用间隔件50,以保持臂部件之间的间距并支撑控制臂的结构。
69.如图13所示,与图5至图9所示的实施例一样,在基本控制臂215构造之后,骑行衬套252可以安装在骑行衬套座部件232的骑行衬套座上,而操纵套筒254可以安装在操纵衬套座部件236的操纵衬套座上。
70.汽车控制臂必须能够有效地传递其在悬架系统操作过程中所承受的载荷。使用相对较轻型金属板冲压件作为控制臂的结构元件的一个问题是金属板结构传递这种悬架载荷而不随时间而损失强度的能力,随时间损失强度可能是由于部件的过大移动自由度造成的。特别是在图5至图9所示的第一实施例的情况下,其中臂部件本身冲压有衬套座接纳孔,重要的是确保围绕这些孔的臂部件材料得到充分加强。图14至图16b中示出了实现这种加强的优选方式的细节。
71.图14示出了前面已经描述的中空管杆30。在其第一端部34处,杆30包括第一衬套螺柱31,该第一衬套螺柱31具有骑行衬套座32,骑行衬套座32引导至锥形部分,该锥形部分包括第一接触表面40。在其第二端38处,杆30包括带操纵衬套座36的第二衬套螺柱33、第二螺柱33中的内螺纹37和第二接触表面42,该第二接触表面42在杆30的第二螺柱33上形成为肩部。杆30的锥形部段43位于操纵衬套座36与第二接触表面42之间。
72.图15示出了铆接的控制臂15。在邻近杆30的第一端34处,当骑行衬套座32穿过第一臂部件12的第一端22处的衬套座接纳孔20时,第一接触表面40抵接第一臂部件12。在邻近杆30的第二端38处,当操纵衬套座36穿过第二臂部件14的第一端22处的衬套座接纳孔20时,第二接触表面42抵接第二臂部件14。
73.如图15至图16b所示,成形环51装配在操纵衬套座36上,并接触杆30的锥形部段43和邻近第二臂部件14的第二端22包围衬套座接纳孔20的第二臂部件的材料。操纵衬套54包
括内套筒55,内套筒55又装配在操纵衬套座36上并接触成形环51。最后,将具有外螺纹部段59的紧固件56拧入操纵衬套座36的相对应内螺纹部段37中。该紧固件56包括紧固件头部61,紧固件头部被成形为接触操纵衬套54。紧固件头部61可以成形为在某些位置允许与操纵衬套54有一定的间隙,以便在悬架系统操作期间充当操纵衬套54偏转的止动件。
74.当紧固件被插入并拧紧时,操纵衬套54被保持就位,并且第二臂部件14经由中间成形环51被牢固地保持在杆30上。由这种布置产生的径向夹紧力充分地加强了包围第二臂部件14的操纵衬套座接纳孔20的第二臂部件14的金属板材料,以便于在悬架系统的操作期间有效地传递力,并形成坚固的控制臂结构。
75.还应当理解,尽管在图示的实施例中公开了特定的部件布置,但是其他布置将从中受益。尽管示出和描述了特定步骤顺序,但是应当理解,除非另有说明,步骤可以以任何次序执行、分拆或组合,并且仍然将受益于本发明。
76.尽管不同的示例具有图示中所示的具体部件,但是本发明的实施例不限于这些特定的组合。可以将这些示例中一个示例中部件或特征的一些部件或特征与这些示例中的另一示例的特征或部件组合使用。
77.尽管已经公开了示例实施例,但是本领域普通技术人员将认识到某些修改将落入权利要求的范围内。为此,应研究权利要求,以确定其真正的范围和内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1