车辆的制作方法
1.本技术涉及车辆,更具体地,涉及适于提高设计性的车辆。
背景技术:
2.传统上,要求提高车辆的设计性。例如,作为车辆设计的重要要素之一的前照灯(headlight)形状已经被设计出来(例如,参见专利文献1)。
3.引用列表
4.专利文献
5.专利文献1:日本专利申请特开第2018-176885号
技术实现要素:
6.本发明要解决的问题
7.然而,不希望在强调车辆设计性的情况下使安全性和功能性劣化。
8.鉴于这样的情况而做出了本技术,并且目的是在避免车辆的安全性和功能性的劣化的同时提高设计性。
9.问题的解决方案
10.根据本技术的一个方面的车辆包括:前线,所述前线在车身的前表面上沿车辆宽度方向延伸;以及前照灯,所述前照灯被布置在所述前表面的左侧和右侧,被所述前线上下分开,以及被配置成从所述前线上方的部分输出近光并且从所述前线下方的部分输出远光。
11.根据本技术的一个方面,在前照灯中,从在车身的前表面上沿车辆宽度方向延伸的前线上方的部分输出近光,并且从前线下方的部分输出远光。
附图说明
12.图1是示出车辆控制系统的配置示例的框图。
13.图2是示出感测区域的示例的图。
14.图3是车辆的前视图和徽标附近的放大图。
15.图4是车辆的左侧视图。
16.图5是车辆的左侧表面的远端部的放大图。
17.图6是车辆的后视图。
18.图7是车辆的左侧的前照灯附近的图。
19.图8是车辆的左侧的前照灯附近的图。
20.图9是车辆的左侧的前照灯附近的图。
21.图10是从右侧观看的车辆内部的示意图。
22.图11是车辆的驾驶员座椅和乘客座椅附近的示意图。
23.图12是车辆的仪表板附近的示意图。
24.图13是车辆的方向盘的放大图。
25.图14是从左斜后方观看的驾驶员座椅的图。
26.图15是示出用于捕获驾驶员的图像的tof相机的安装位置的示例的图。
27.图16是示出用于捕获驾驶员的图像的tof相机的安装位置的示例的图。
28.图17是示出由安装在图15和图16中的安装位置处的tof相机捕获的图像的示例的示意图。
29.图18是示出由安装在方向盘附近的tof相机捕获的图像的示例的示意图。
30.图19是示出用于捕获驾驶员的图像的tof相机的安装位置的示例的图。
31.图20是示出信息处理单元的配置示例的框图。
32.图21是示出在通电时的灯的发光模式的示例的图。
33.图22是示出在通电时的灯的发光模式的示例的图。
34.图23是示出在驾驶期间和在前照灯熄灭时的灯的发光模式的示例的图。
35.图24是示出在驾驶期间和在前照灯点亮时的灯的发光模式的示例的图。
36.图25是示出在制动操作时的灯的发光模式的示例的图。
37.图26是示出在转向信号操作时的灯的发光模式的示例的图。
38.图27是示出在车门打开时的灯的发光模式的示例的图。
39.图28是示出在车门关闭时的灯的发光模式的示例的图。
40.图29是示出在停车时的灯的发光模式的示例的图。
41.图30是示出在断电时的灯的发光模式的示例的图。
42.图31是用于说明图像捕获处理的流程图。
43.图32示出在设定对象检测模式时的运动图像的示例。
44.图33示出在设定预测模式时的运动图像的示例。
45.图34示出在设定搜索模式时的运动图像的示例。
46.图35示出在设定搜索模式时的运动图像的示例。
47.图36是用于说明编辑处理的流程图。
具体实施方式
48.以下,将描述用于实现本技术的实施例。将按照以下顺序给出描述。
49.1.车辆控制系统的配置示例
50.2.实施例
51.3.变型例
52.4.其他
53.《《1.车辆控制系统的配置示例》》
54.图1是示出作为应用了本技术的移动设备控制系统的示例的车辆控制系统11的配置示例的框图。
55.车辆控制系统11被设置在车辆1中,并且执行与车辆1的行驶辅助和自动驾驶有关的处理。
56.车辆控制系统11包括处理器21、通信单元22、地图信息累积单元23、全球导航卫星系统(gnss)接收单元24、外部识别传感器25、车内传感器26、车辆传感器27、记录单元28、行
驶辅助/自动驾驶控制单元29、驾驶员监控系统(dms)30、人机界面(hmi)31和车辆控制单元32。
57.处理器21、通信单元22、地图信息累积单元23、gnss接收单元24、外部识别传感器25、车内传感器26、车辆传感器27、记录单元28、行驶辅助/自动驾驶控制单元29、驾驶员监控系统(dms)30、人机界面(hmi)31以及车辆控制单元32经由通信网络41彼此连接。通信网络41包括例如总线、符合任何标准的车内车载通信网络,诸如控制器局域网(can)、本地互连网络(lin)、局域网(lan)、flexray(注册商标)或以太网(注册商标)等。注意,还存在车辆控制系统11的每个单元通过例如短距离无线通信(近场通信(nfc))、蓝牙(注册商标)等直接连接而不经由通信网络41的情况。
58.注意,在下文中,在车辆控制系统11的每个单元经由通信网络41进行通信的情况下,将省略对通信网络41的描述。例如,在处理器21和通信单元22经由通信网络41进行通信的情况下,简单地描述为处理器21和通信单元22进行通信。
59.处理器21包括各种处理器,诸如例如中央处理单元(cpu)、微处理单元(mpu)和电子控制单元(ecu)。处理器21控制整个车辆控制系统11。
60.通信单元22与车辆内部和外部的各种类型的设备、其他车辆、服务器、基站等进行通信,并且发送和接收各种数据。例如,作为与车辆外部的通信,通信单元22从外部接收用于更新用于控制车辆控制系统11的操作的软件的程序、地图信息、交通信息、车辆1周围的信息等。例如,通信单元22向外部发送关于车辆1的信息(例如,指示车辆1的状态的数据、识别单元73的识别结果等)、车辆1周围的信息等。例如,通信单元22执行与车辆紧急呼叫系统(诸如紧急呼叫(ecall))对应的通信。
61.注意,通信单元22的通信方法不受特别限制。此外,可以使用多种通信方法。
62.例如,作为与车辆内部的通信,通信单元22通过诸如无线lan、蓝牙、nfc或无线usb(wusb)之类的通信方法与车内设备进行无线通信。例如,通信单元22经由连接端子(未示出)(和电缆,如果需要的话)、通过诸如通用串行总线(usb)、高清晰度多媒体接口(hdmi、注册商标)或移动高清晰度链路(mhl)之类的通信方法与车内设备进行有线通信。
63.这里,车内设备例如是未连接到车辆中的通信网络41的设备。例如,假设了由乘客(诸如驾驶员)携带的移动设备或可穿戴设备、带入到车辆中并且临时安装的信息设备等。
64.例如,通信单元22使用诸如第四代移动通信系统(4g)、第五代移动通信系统(5g)、长期演进(lte)或专用短距离通信(dsrc)之类的无线通信方法,经由基站或接入点与存在于外部网络(例如,因特网、云网络或公司特定网络)上的服务器等进行通信。
65.例如,通信单元22使用点对点(p2p)技术与存在于自身车辆附近的终端(例如,行人或商店的终端、或机器类型通信(mtc)终端)进行通信。例如,通信单元22执行v2x通信。v2x通信例如是与其他车辆的车辆对车辆通信、与路侧设备等的车辆对基础设施通信、车辆对家通信、与由行人拥有的终端等的车辆对行人通信等。
66.例如,通信单元22接收由诸如无线电波信标、光信标或fm多路广播之类的道路交通信息通信系统(车辆信息和通信系统(vics)、注册商标)发送的电磁波。
67.地图信息累积单元23累积从外部获取的地图和由车辆1创建的地图。例如,地图信息累积单元23累积三维高精度地图、精度比高精度地图低并且覆盖广阔区域的全局地图等。
68.高精度地图例如是动态地图、点云地图、矢量地图(也被称为高级驾驶员辅助系统(adas)地图)等。动态地图例如是包括动态信息、半动态信息、半静态信息和静态信息这四层的地图,并且从外部服务器等提供。点云地图是包含点云(点群(point group)数据)的地图。矢量地图是将诸如车道和交通灯位置之类的信息与点云地图相关联的地图。点云地图和矢量地图可以从例如外部服务器等提供,或者可以被车辆1创建为用于基于雷达52、lidar 53等的感测结果来与稍后描述的局部地图进行匹配的地图,并且可以累积在地图信息累积单元23中。此外,在从外部服务器等提供高精度地图的情况下,为了减少通信容量,例如,从服务器等获取关于车辆1将要行驶的规划路径的几百平方米的地图数据。
69.gnss接收单元24从gnss卫星接收gnss信号,并且将其提供给行驶辅助/自动驾驶控制单元29。
70.外部识别传感器25包括用于识别车辆1外部的状况的各种传感器,并且将来自每个传感器的传感器数据提供给车辆控制系统11的每个单元。可以采用包括在外部识别传感器25中的任何类型和数量的传感器。
71.例如,外部识别传感器25包括相机51、雷达52、光检测与测距或激光成像检测与测距(lidar)53以及超声波传感器54。可以采用任意数量的相机51、雷达52、lidar 53和超声波传感器54,并且每个传感器的感测区域的示例将在后面描述。
72.注意,作为相机51,例如,根据需要使用任意图像捕获方式的相机,诸如飞行时间(tof)相机、立体相机、单目相机或红外相机。
73.此外,例如,外部识别传感器25包括用于检测天气、气象状态、亮度等的环境传感器。环境传感器包括例如雨滴传感器、雾传感器、阳光传感器、雪传感器、照度传感器等。
74.此外,例如,外部识别传感器25包括用于检测车辆1周围的声音、声源的位置等的麦克风。
75.车内传感器26包括用于检测车辆内部信息的各种传感器,并且将来自每个传感器的传感器数据提供给车辆控制系统11的每个单元。可以采用包括在车内传感器26中的任何类型和数量的传感器。
76.例如,车内传感器26包括相机、雷达、就座传感器、方向盘传感器、麦克风、生物传感器等。作为相机,例如,可以使用任意图像捕获方式的相机,诸如tof相机、立体相机、单目相机或红外相机。生物传感器例如设置在座椅、方向盘等中,并且检测乘客(例如驾驶员)的各种类型的生物信息。
77.车辆传感器27包括用于检测车辆1的状态的各种传感器,并且将来自每个传感器的传感器数据提供给车辆控制系统11的每个单元。可以采用包括在车辆传感器27中的任何类型和数量的传感器。
78.例如,车辆传感器27包括速度传感器、加速度传感器、角速度传感器(陀螺传感器)和惯性测量单元(imu)。例如,车辆传感器27包括检测方向盘的转向角的转向角传感器、横摆率(yaw rate)传感器、检测加速器踏板的操作量的加速器传感器和检测制动踏板的操作量的制动传感器。例如,车辆传感器27包括检测发动机或电机的转数的旋转传感器、检测轮胎的气压的气压传感器、检测轮胎的滑移率的滑移率传感器和检测车轮的转速的车轮速度传感器。例如,车辆传感器27包括检测电池的剩余电量和温度的电池传感器以及检测外部冲击的冲击传感器。
79.例如,记录单元28包括诸如只读存储器(rom)、随机存取存储器(ram)和硬盘驱动器(hdd)之类的磁存储设备、半导体存储设备、光存储设备、磁光存储设备等。记录单元28存储由车辆控制系统11的每个单元使用的各种程序、数据等。例如,记录单元28记录包括由机器人操作系统(ros)发送和接收的消息的ros包(rosbag)文件,在该机器人操作系统(ros)中运行与自动驾驶有关的应用程序。例如,记录单元28包括事件数据记录器(edr)和自动驾驶数据存储系统(dssad),并且记录车辆1在诸如事故之类的事件之前和之后的信息。
80.行驶辅助/自动驾驶控制单元29控制车辆1的行驶支持和自动驾驶。例如,行驶辅助/自动驾驶控制单元29包括分析单元61、动作规划单元62和操作控制单元63。
81.分析单元61对车辆1和周围环境的状况执行分析处理。分析单元61包括自身位置估计单元71、传感器融合单元72和识别单元73。
82.自身位置估计单元71基于来自外部识别传感器25的传感器数据和累积在地图信息累积单元23中的高精度地图来估计车辆1的自身位置。例如,自身位置估计单元71基于来自外部识别传感器25的传感器数据生成局部地图,并且通过执行局部地图与高精度地图的匹配来估计车辆1的自身位置。例如,车辆1的位置是基于后轮对车轴(rear wheel pair axle)的中央。
83.局部地图例如是使用诸如同步定位与地图构建(slam)之类的技术创建的三维高精度地图、占用网格地图等。三维高精度地图例如是上述点云地图等。占用网格地图是将车辆1周围的三维或二维空间划分为预定大小的网格并且以网格为单位表示对象的占用状态的地图。例如,通过对象的存在或不存在、或存在概率来表示对象的占用状态。例如,局部地图还用于由识别单元73对车辆1外部的状况进行的检测处理和识别处理。
84.注意,自身位置估计单元71可以基于gnss信号和来自车辆传感器27的传感器数据来估计车辆1的自身位置。
85.传感器融合单元72执行组合多个不同类型的传感器数据(例如,从相机51提供的图像数据和从雷达52提供的传感器数据)以获得新信息的传感器融合处理。用于组合不同类型的传感器数据的方法包括集成、融合、关联等。
86.识别单元73执行对车辆1外部的状况的检测处理和识别处理。
87.例如,识别单元73基于来自外部识别传感器25的信息、来自自身位置估计单元71的信息、来自传感器融合单元72的信息等,执行对车辆1外部的状况的检测处理和识别处理。
88.具体地,例如,识别单元73执行对车辆1周围的对象的检测处理、识别处理等。对象的检测处理例如是检测对象的存在或不存在、大小、形状、位置、移动等的处理。对象的识别处理例如是识别对象的诸如类型之类的属性或识别特定对象的处理。然而,检测处理和识别处理不一定明确划分,并且可以重叠。
89.例如,识别单元73通过执行用于针对每个点群簇而基于lidar、雷达等的传感器数据对点云进行分类的聚类来检测车辆1周围的对象。结果,检测到车辆1周围的对象的存在或不存在、大小、形状和位置。
90.例如,识别单元73通过执行跟随通过聚类而分类的点群簇的移动的跟踪来检测车辆1周围的对象的移动。结果,检测到车辆1周围的对象的速度和行驶方向(运动向量)。
91.例如,识别单元73通过对从相机51提供的图像数据执行诸如语义分割之类的对象
识别处理来识别车辆1周围的对象的类型。
92.注意,作为要检测或识别的对象,例如,假设了车辆、人、自行车、障碍物、结构体、道路、交通灯、交通标志、道路标志等。
93.例如,识别单元73基于地图信息累积单元23中累积的地图、自身位置的估计结果和车辆1周围的对象的识别结果来执行对车辆1周围的交通规则的识别处理。通过该处理,例如,识别交通灯的位置和状态、交通标志和道路标志的内容、交通规则的内容、可行驶车道等。
94.例如,识别单元73执行对车辆1的周围环境的识别处理。作为要识别的周围环境,例如,假设了天气、温度、湿度、亮度、路面状况等。
95.动作规划单元62创建车辆1的动作规划。例如,动作规划单元62通过执行路径规划和路径跟随的处理来创建动作规划。
96.注意,路径规划(全局路径规划)是规划从起点到终点的大致路径的处理。该路径规划被称为轨迹规划,并且还包括轨迹生成(局部路径规划)处理,该轨迹生成(局部路径规划)处理在通过路径规划而规划的路径中考虑到车辆1的运动特性而使得能够在车辆1附近进行安全且平稳的行驶。
97.路径跟随是规划用于在规划的时间内安全且准确地在通过路径规划而规划的路径上行驶的操作的处理。例如,计算车辆1的目标速度和目标角速度。
98.操作控制单元63控制车辆1的操作,以便实现由动作规划单元62创建的动作规划。
99.例如,操作控制单元63控制转向控制单元81、制动控制单元82和驱动控制单元83,以执行加速/减速控制和方向控制,使得车辆1在通过轨迹规划而计算的轨迹上行驶。例如,为了实现诸如碰撞避免或冲击缓解、跟随行驶、车速保持行驶、自身车辆碰撞警告、自身车辆车道偏离警告等adas的功能的目的,操作控制单元63执行协同控制。此外,例如,为了在不依赖于驾驶员的操作的情况下自主行驶的自动驾驶等的目的,操作控制单元63执行协同控制。
100.dms 30基于来自车内传感器26的传感器数据、输入到hmi 31的输入数据等,执行驾驶员认证处理、驾驶员状态的识别处理等。作为要识别的驾驶员状态,例如,假设了身体状况、觉醒水平、注意力水平、疲劳水平、视线方向、醉酒水平、驾驶操作、姿势等。
101.注意,dms 30可以执行除驾驶员之外的乘客的认证处理和乘客状态的识别处理。此外,例如,dms 30可以基于来自车内传感器26的传感器数据来执行对车辆内部的状况的识别处理。作为要识别的车辆内部的状况,例如,假设了温度、湿度、亮度、气味等。
102.hmi 31用于输入各种数据、指令等,基于输入的数据、指令等生成输入信号,并且将其提供给车辆控制系统11的每个单元。例如,hmi 31包括:诸如触摸面板、按钮、麦克风、开关和操纵杆之类的操作设备;可以通过除手动操作之外的方法(例如利用语音或手势)进行输入的操作设备;等等。注意,例如,hmi 31可以是使用红外线或其他无线电波的远程控制设备,或者外部连接设备(例如与车辆控制系统11的操作相对应的移动设备或可穿戴设备)。
103.此外,hmi 31执行输出控制,以控制视觉信息、听觉信息和触觉信息的生成和向乘客或车辆外部的输出,并且控制输出内容、输出定时、输出方法等。例如,视觉信息是由图像或光表示的信息,例如操作屏幕、车辆1的状态显示、警告显示或表示车辆1周围的状况的监
视器图像。例如,听觉信息是由声音表示的信息,例如引导、警告声音或警告消息。例如,触觉信息是通过力、振动、运动等给予乘客触觉的信息。
104.作为输出视觉信息的设备,例如,假设了显示设备、投影仪、导航设备、仪表板、相机监控系统(cms)、电子镜、灯等。例如,除了具有正常显示的设备之外,显示设备还可以是在乘客的视野中显示视觉信息的设备,例如平视显示器、透射显示器或具有增强现实(ar)功能的可穿戴设备。
105.作为输出听觉信息的设备,例如,假设了音频扬声器、头戴式耳机、耳机等。
106.例如,作为输出触觉信息的设备,假设了使用触觉技术的触觉元件等。触觉元件例如设置在方向盘、座椅等上。
107.车辆控制单元32控制车辆1的每个单元。车辆控制单元32包括转向控制单元81、制动控制单元82、驱动控制单元83、车身系统控制单元84、灯控制单元85和喇叭控制单元86。
108.转向控制单元81执行对车辆1的转向系统的状态的检测、控制等。转向系统包括例如包括方向盘等的转向机构、电动助力转向等。转向控制单元81包括例如控制转向系统的诸如ecu之类的控制单元、驱动转向系统的致动器等。
109.制动控制单元82执行对车辆1的制动系统的状态的检测、控制等。制动系统包括例如包括制动踏板的制动机构、防抱死制动系统(abs)等。例如,制动控制单元82包括控制制动系统的诸如ecu之类的控制单元、驱动制动系统的致动器等。
110.驱动控制单元83执行对车辆1的驱动系统的状态的检测、控制等。驱动系统包括例如加速器踏板、用于产生驱动力的驱动力产生设备(例如内燃机或驱动电机)、用于将驱动力传递到车轮的驱动力传递机构等。驱动控制单元83包括例如控制驱动系统的诸如ecu之类的控制单元、对驱动系统进行驱动的致动器等。
111.车身系统控制单元84执行对车辆1的车身系统的状态的检测、控制等。车身系统包括例如无钥匙进入系统、智能钥匙系统、电动车窗设备、电动座椅、空调、安全气囊、安全带、变速杆等。车身系统控制单元84包括例如控制车身系统的诸如ecu之类的控制单元、驱动车身系统的致动器等。
112.灯控制单元85执行对车辆1的各种灯的状态的检测、控制等。作为要控制的灯,例如,假设了前照灯、背光灯、雾灯、转向信号灯、制动灯、投影、保险杠显示器等。灯控制单元85包括对灯进行控制的诸如ecu之类的控制单元、对灯进行驱动的致动器等。
113.喇叭控制单元86执行对车辆1的汽车喇叭的状态的检测、控制等。喇叭控制单元86包括例如控制汽车喇叭的诸如ecu之类的控制单元、驱动汽车喇叭的致动器等。
114.图2是示出图1中的外部识别传感器25的相机51、雷达52、lidar 53和超声波传感器54的感测区域的示例的图。
115.感测区域101f和101b示出了超声波传感器54的感测区域的示例。感测区域101f覆盖车辆1的前端的周边。感测区域101b覆盖车辆1的后端的周边。
116.感测区域101f和101b中的感测结果例如用于车辆1的停车辅助等。
117.感测区域102f至102b示出了用于短距离或中距离的雷达52的感测区域的示例。感测区域102f覆盖比车辆1前方的感测区域101f更远的位置。感测区域102b覆盖比车辆1后方的感测区域101b更远的位置。感测区域102l覆盖车辆1的左侧表面的后方周边。感测区域102r覆盖车辆1的右侧表面的后方周边。
118.感测区域102f中的感测结果例如用于车辆1前方存在的车辆、行人等的检测等。感测区域102b中的感测结果例如用于车辆1后方的碰撞预防功能等。感测区域102l和102r中的感测结果例如用于检测车辆1侧面的盲区中的对象等。
119.感测区域103f到103b示出了相机51的感测区域的示例。感测区域103f覆盖比车辆1前方的感测区域102f更远的位置。感测区域103b覆盖比车辆1后方的感测区域102b更远的位置。感测区域103l覆盖车辆1的左侧表面的周边。感测区域103r覆盖车辆1的右侧表面的周边。
120.感测区域103f中的感测结果用于例如交通灯或交通标志的识别、车道偏离预防辅助系统等。感测区域103b中的感测结果用于例如停车辅助、环绕视图系统等。例如,在环绕视图系统等中使用感测区域103l和103r中的感测结果。
121.感测区域104示出了lidar 53的感测区域的示例。感测区域104覆盖比车辆1前方的感测区域103f更远的位置。然而,感测区域104在左右方向上的范围比感测区域103f窄。
122.感测区域104中的感测结果用于例如紧急制动、碰撞避免、行人检测等。
123.感测区域105示出了用于长距离的雷达52的感测区域的示例。传感区域105覆盖比车辆1前方的感测区域104更远的位置。然而,感测区域105在左右方向上的范围比感测区域104窄。
124.感测区域105中的感测结果用于例如自适应巡航控制(acc)等。
125.注意,每个传感器的感测区域可以具有除图2中的配置之外的各种配置。具体地,超声波传感器54还可以在车辆1侧面执行感测,或者lidar 53可以在车辆1后方执行感测。
126.《《2.实施例》》
127.接下来,将参考图3到图35来描述本技术的实施例。
128.《车辆1的外部的配置示例》
129.首先,将参考图3到图9来描述车辆1的外部的配置示例。在下文中,将主要描述车辆1外部的照明系统的配置。
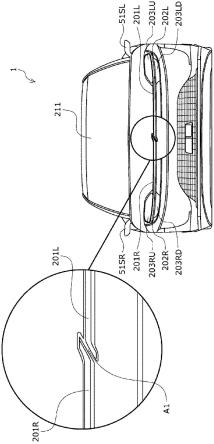
130.图3是车辆1的前视图和在前部中央处的车辆1的徽标附近的放大图。图4是车辆1的左侧视图。图5是车辆1的左侧表面的远端部的放大图。图6是车辆1的后视图。图7至图9是从多个方向观看的车辆1的左侧的前照灯附近的图。
131.注意,在下文中,当面对车辆1的行驶方向时的左侧和右侧分别被称为车辆1的左侧和右侧。例如,图3中的左侧和右侧分别是车辆1的右侧和左侧。
132.车辆1外部的许多灯和传感器沿环形线l1布置,该环形线l1是在大致水平方向上围绕车辆1的车身的周边的虚拟线。这里,“沿环形线l1布置”不仅包括布置在环行线l1上的情况,而且包括布置在环形线l1附近的情况。
133.例如,如图3中所示,辅助灯201l、辅助灯201r、日间行车灯202l、日间行车灯202r、前照灯203lu、前照灯203ld、前照灯203ru和前照灯203rd布置在车身的前表面上。
134.辅助灯201l沿车辆宽度方向(左右方向)从车身前表面的中央延伸到前照灯203lu和203ld的右端附近。辅助灯201r沿车辆宽度方向(左右方向)从车身前表面的中央延伸到前照灯203ru和203rd的左端附近。
135.辅助灯201l和辅助灯201r彼此分开并且设置有间隙。具体地,辅助灯201l的右端部向右斜下方弯曲,而辅助灯201r的左端部向左斜上方弯曲。辅助灯201l的右端处的弯曲
部分和辅助灯201r的左端处的弯曲部分以预定间隔大致平行地彼此面对,以形成车辆1的徽标。例如,在徽标的中央附近,在辅助灯201l和辅助灯201r之间的间隙的区域a1中布置光学传感器(未示出),诸如例如相机、雷达或lidar。
136.日间行车灯202l在水平方向上从辅助灯201l的左端延伸到前照灯203lu和203ld的左端附近。此外,如图7至图9中所示,日间行车灯202l的左端部向车辆1后方弯曲,并且在贯穿车身的方向上延伸。
137.日间行车灯202r在水平方向上从辅助灯201r的右端延伸到前照灯203ru和203rd的右端附近。此外,尽管未示出,但是与日间行车灯202l类似,日间行车灯202r的右端部向车辆1后方弯曲,并且在贯穿车身的方向上延伸。
138.辅助灯201l、辅助灯201r、日间行车灯202l和日间行车灯202r在车身的前表面上沿环形线l1构成前灯(front light)。此外,前灯构成作为环形线l1的一部分的前线,在车身的前表面上沿车辆宽度方向(左右方向)延伸,在两个端部处向后弯曲,并且在贯穿车身的方向上延伸。
139.辅助灯201l、辅助灯201r、日间行车灯202l和日间行车灯202r中的每个包括在水平方向上布置的多个led。对于每个led,可以单独控制开/关、颜色、亮度等。
140.注意,辅助灯201l和辅助灯201r在不需要彼此单独区分的情况下将被简单地称为辅助灯201。在下文中,日间行车灯202l和日间行车灯202r在不需要彼此单独区分的情况下被简单地称为日间行车灯202。
141.前照灯203lu与日间行车灯202l的上侧相邻,在水平方向上延伸,并且在左端部处向后弯曲。前照灯203ld与日间行车灯202l的下侧相邻,在水平方向上延伸,并且在左端部处向后弯曲。如上所述,前照灯203lu和前照灯203ld被日间行车灯202l(前线)上下分开。
142.前照灯203ru与日间行车灯202r的上侧相邻,在水平方向上延伸,并且在右端部向后弯曲。前照灯203rd与日间行车灯202r的下侧相邻,在水平方向上延伸,并且在右端部向后弯曲。如上所述,前照灯203ru和前照灯203rd被日间行车灯202r(前线)上下分开。
143.前照灯203lu和前照灯203ru中的每个包括在水平方向和垂直方向上布置的多个led,并且输出近光。前照灯203ld和前照灯203rd中的每个包括在水平方向和垂直方向上布置的多个led,并且输出远光。对于每个led,可以单独控制开/关、颜色、亮度等。
144.注意,在下文中,前照灯203lu和前照灯203ld在不需要彼此单独区分的情况下被简单地称为前照灯203l。在下文中,前照灯203ru和前照灯203rd在不需要彼此单独区分的情况下被简单地称为前照灯203r。在下文中,前照灯203l和前照灯203r在不需要彼此单独区分的情况下被简单地称为前照灯203。
145.通过以这种方式用前线将前照灯203l和前照灯203r上下分开,提高了前照灯203l和前照灯203r的设计的自由度。例如,前照灯203l和前照灯203r可以具有除斜眼形状或下垂眼形状之外的设计。此外,由于近光灯(前照灯203lu和前照灯203ru)和远光灯(前照灯203ld和前照灯203rd)布置在适当的位置处,因此前照灯203的功能性和车辆1的安全性没有劣化。
146.此外,例如,如图4中所示,转向信号灯204l、辅助灯205fl和辅助灯205bl布置在车身的左侧表面上。
147.转向信号灯204l在a柱215l的延长线上并且在环形线l1的正上方沿前后方向延
伸。
148.辅助灯205fl布置在左前车门212fl的车门把手213fl的背面侧,并且照亮车门把手213fl的附近。由于车门把手213fl布置在环形线l1的正上方,因此辅助灯205fl也布置在环形线l1的正上方。
149.此外,例如,诸如nfc之类的短距离无线通信(未示出)布置在车门把手213fl或车门把手213fl附近。
150.辅助灯205bl布置在左后车门212bl的车门把手213bl的背面侧,并且照亮车门把手213bl的附近。由于车门把手213bl布置在环形线l1的正上方,因此辅助灯205bl也布置在环形线l1的正上方。
151.此外,例如,诸如nfc之类的短距离无线通信(未示出)布置在车门把手213bl或车门把手213bl附近。
152.如上所述,在车辆1的左侧表面上,转向信号灯204l、辅助灯205fl和辅助灯205bl沿环形线l1在前后方向上布置。
153.转向信号灯204l、辅助灯205fl和辅助灯205bl中的每个包括在水平方向上布置的多个led。对于每个led,可以单独控制开/关、颜色、亮度等。
154.此外,如图4中所示,在环形线l1和a柱215l的延长线的交叉点附近的区域a2l中设置光学传感器,诸如例如相机、雷达或lidar。例如,在转向信号灯204l下方并且在环形线l1上设置lidar 53fl。
155.此外,在环形线l1和c柱216l的延长线的交叉点附近的区域a3l中设置光学传感器(未示出),诸如例如相机、雷达或lidar。
156.以此方式,通过将光学传感器布置在环形线l1的附近,例如,即使光学传感器的表面的颜色不同于车身的颜色,也识别出光学传感器构成环形线l1的一部分。因此,光学传感器自然地融入到车身的外观中,而不会给出陌生感。
157.注意,尽管未示出,但是在车辆1的右侧表面上,转向信号灯204r、辅助灯205fr、辅助灯205br、车门把手213fr、车门把手213br、短距离无线通信设备和光学传感器也布置在与左侧表面上的位置类似的位置处。
158.此外,例如,如图6中所示,尾灯206cl、尾灯206cr、尾灯206l、尾灯206r、制动灯207lu、制动灯207ld、制动灯207ru和制动灯207rd布置在车身的后表面上。
159.尾灯206cl在车辆宽度方向(左右方向)上从车身的后表面的中央延伸到制动灯207lu和207ld的右端附近。尾灯206cr在水平方向上从车身的后表面的中央延伸到制动灯207ru和207rd的车辆宽度方向(在右端附近)。
160.尾灯206cl和尾灯206cr彼此分开并且设置有间隙。具体地,尾灯206cl的右端部向右斜向上弯曲,而尾灯206cr的左端部向左斜向下弯曲。尾灯206cl的右端处的弯曲部分和尾灯206cr的左端处的弯曲部分以预定间隔大致平行地彼此面对,以形成车辆1的徽标。例如,在徽标的中央附近,在尾灯206cl和尾灯206cr之间的间隙的区域a4中布置光学传感器(未示出),诸如例如相机、雷达或lidar。
161.尾灯206l在水平方向上从尾灯206cl的左端延伸到制动灯207lu和207ld的左端附近。尾灯206l的左端部向前弯曲。尾灯206r在水平方向上从尾灯206cr的右端延伸到制动灯207ru和207rd的右端附近。尾灯206r的右端部向前弯曲。
162.尾灯206cl、尾灯206cr、尾灯206l和尾灯206r构成在车身的后表面上沿左右方向延伸并且两个端部向前弯曲的尾线。尾线构成环形线l1的一部分。
163.尾灯206cl、尾灯206cr、尾灯206l和尾灯206r中的每个包括在水平方向上布置的多个led。对于每个led,可以单独控制开/关、颜色、亮度等。
164.注意,在下文中,尾灯206cl和尾灯206cr在不需要彼此单独区分的情况下被简单地称为尾灯206c。在下文中,尾灯206c、尾灯206l和尾灯206r在不需要彼此单独区分的情况下被简单地称为尾灯206。
165.制动灯207lu与尾灯206l的上侧相邻,并且在左端部处向前弯曲。制动灯207ld与尾灯206l的下侧相邻,并且在左端部处向前弯曲。如上所述,制动灯207lu和制动灯207ld被尾灯206l上下分开。
166.制动灯207ru与尾灯206r的上侧相邻,并且在右端部处向前弯曲。制动灯207rd与尾灯206r的下侧相邻,并且在右端部处向前弯曲。如上所述,制动灯207ru和制动灯207rd被尾灯206r(尾线)上下分开。
167.制动灯207lu、制动灯207ld、制动灯207ru和制动灯207rd中的每个包括在水平方向上布置的多个led。对于每个led,可以单独控制开/关、颜色、亮度等。
168.注意,在下文中,制动灯207lu和制动灯207ld在不需要彼此单独区分的情况下被简单地称为制动灯207l。在下文中,制动灯207ru和制动灯207rd在不需要彼此单独区分的情况下被简单地称为制动灯207r。在下文中,制动灯207l和制动灯207r在不需要彼此单独区分的情况下被简单地称为制动灯207。
169.此外,环形线l2是在大致水平方向上围绕车辆1的车身周边的虚拟线,以该环形线l2作为边界,车身的颜色沿挡风玻璃211的下端、车门212fl的车窗214fl的下端、车门212bl的车窗214bl的下端、车门212fr的车窗214fr(未示出)的下端和车门212br的车窗214br(未示出)的下端而不同。
170.例如,沿环形线l2通过镀铬形成黑线。然后,将环形线l2上方的部分整合成黑色。例如,在环形线l2上方将黑色涂层施加于车身。此外,挡风玻璃211、车窗214fl、车窗214bl、车窗214fr、车窗214br和后车窗217被着色为黑色。
171.然而,在环形线l2下方,将与环形线l2上方的颜色不同的颜色的涂层施加于车身。注意,下方车身的颜色没有特别限制。
172.此外,在车窗214fl和车窗214fr(未示出)的前端和下端附近,沿环形线l2设置相机51sl和相机51sr。相机51sl和相机51sr中的每个捕获车辆1的左斜后方或右斜后方的图像。
173.如上所述,可以在避免车辆1的安全性和功能性的劣化的同时提高设计性。
174.例如,在车辆1的外观中,两条大致平行的环形线l1和l2将被虚拟地识别。因此,车身看起来很低,可以给出运动的印象。
175.此外,如上所述,提高了前照灯的设计的自由度。此外,由于每个灯被布置在适当的位置处,因此每个灯的功能性和车辆1的安全性没有劣化。
176.此外,通过前线(前灯)在两端处向后弯曲并且在贯穿车身的方向上延伸,给出了前线贯穿车身以连接到左侧表面上的lidar 53fl和右侧表面上的lidar 53rl的印象。
177.此外,通过沿环形线l1将传感器布置在车辆1的周边,给出了观察(监视)车辆1的
周围环境的印象,并且可以有效防止车辆1被盗和毁坏。
178.《车辆1的内部的配置示例》
179.接下来,将参考图10到图19描述车辆1的内部的配置示例。
180.首先,将参考图10到图13描述沿环形线l11布置的设备。
181.图10是从右侧观看的车辆1的内部示意图。图11是车辆1的驾驶员座椅251fl和乘客座椅251fr附近的示意图。图12是车辆1的仪表板附近的示意图。图13是车辆的方向盘253的放大图。
182.在车辆1内部,环形线l11是在大致水平方向上围绕内部周边的虚拟线,沿该环形线l11(图10)集中布置多个用于用户接口的设备,并且各种接口被聚合。
183.这里,用于用户接口的设备包括例如输出视觉信息、听觉信息和触觉信息的输出设备、以及用于各种操作的操作设备。此外,“沿环形线l11布置”不仅包括布置在环形线l11上的情况,而且包括布置在环形线l11附近的情况。
184.环形线l11布置在与车辆1外部的环形线l1相同的高度处。此外,环形线l11从前方到后方稍微向上倾斜。这是因为后部座椅251bl和后部座椅251br的位置高于驾驶员座椅251fl和乘客座椅251fr的位置。
185.例如,构成图1的hmi 31的显示设备沿环形线l11布置。
186.例如,如图10到图12中所示,中央显示器252布置在驾驶员座椅251fl和乘客座椅251fr前方的仪表板的前表面上,以便在车辆宽度方向(左右方向)上延伸到环形线l11的正上方。
187.根据显示器的取向,中央显示器252大体上被分开成左端部分、中央部分和右端部分。中央显示器252的左端部分、中央部分和右端部分可以分别单独地执行显示,或者可以整体地执行显示。中央显示器252的左端部分和右端部分主要用作数字外视镜(电子侧视镜),该数字外视镜(电子侧视镜)是传统侧视镜的替代品。例如,左端部分显示由相机51sl(图3)捕获的车辆1的左斜后方的图像。右端部分显示由相机51sr(图3)捕获的车辆1的右斜后方的图像。
188.此外,如图11到图13中所示,方向盘253在驾驶员座椅251fl前方布置在环形线l11上。
189.此外,如图12和图13中所示,沿方向盘253的中央部分的周边设置照明装置254。照明装置254包括沿方向盘253的中央部分的周边布置在圆周上的多个led。对于每个led,可以单独控制开/关、颜色、亮度等。因此,照明装置254的颜色、亮度和发光区域(发光范围)是可变的。
190.注意,安全气囊被容纳在方向盘253的中央部分中。然后,当安全气囊操作时,图13中的方向盘253的中央部分中的由虚线表示的部分破碎。照明装置254被布置成避开中央部分中的要破碎的部分。因此,在安全气囊操作期间,可以防止照明装置254的碎片和有害物质的散射。
191.此外,构成图1的hmi 31的扬声器沿环形线l11布置。
192.具体地,如图10和图11中所示,扬声器255fl嵌入在驾驶员座椅251fl侧的车门212fl内部的环形线l11附近。如图11中所示,扬声器255fr嵌入在乘客座椅251fr侧的车门212fr内部的环形线l11附近。如图10中所示,扬声器255bl嵌入在左后部座椅251bl侧的车
门212bl内部的环形线l11附近。尽管未示出,但是扬声器255br嵌入在右后部座椅251br侧的车门212br内部的环形线l11附近。
193.此外,尽管未示出,但是在驾驶员座椅251fl、乘客座椅251fr、后部座椅251bl和后部座椅251br中的每个的头枕下方单独嵌入扬声器(在下文中被称为座椅扬声器)。此外,调整座椅的形状和座椅扬声器的位置,以便各种身高(坐高)的人可以清楚地听到每个座椅的座椅扬声器的声音。
194.例如,沿环形线l11布置的扬声器255fl至255br用来针对整个车辆内部(车辆内的所有乘客)输出声音。
195.此外,可以通过扬声器255fl至255fr来实现360度真实音频。例如,通过实现360度真实音频,可以在车辆内部利用具有真实感的声音来享受运动图像、音乐等。此外,可以通过声音的输出方向来通知存在于车辆1周围的诸如障碍物之类的危险对象的位置。
196.然而,例如,每个座椅的座椅扬声器主要用来针对每个座椅上就座的单个乘客输出私人声音。也就是说,从每个座椅扬声器输出的声音被单独控制。
197.注意,扬声器的布置是示例,并且可以改变。例如,可以增加布置在环形线l11上的扬声器的数量。例如,扬声器可以布置在车辆1的前部中的仪表板上。
198.此外,如图10中所示,环形灯256被布置成以便在环形线l11的稍微上方并且在与外部环形线l1大致相同的高度处、与环形线l11大致平行地围绕车辆的内周边。环形灯256是包括以在大致水平方向上布置的方式嵌入在车辆内部的多个led的筒灯,并且主要用作辅助照明或室内装饰。对于每个led,可以单独控制开/关、颜色、亮度等。
199.注意,环形灯256不一定围绕车辆的整个内周边,并且可以围绕车辆内周边的一部分而不是连续的。
200.此外,各种操作设备沿环形线l11布置。
201.例如,如上所述,方向盘253在驾驶员座椅251fl前方布置在环形线l11上。
202.此外,如图13中所示,在方向盘253后面设置作为棒状操作体的拨杆(stalk lever)257,以从转向柱(未示出)起在车辆宽度方向(横向方向(右方向))上延伸。可以在上下方向上移动拨杆257,并且通过在上下方向上移动拨杆257来切换车辆1的换档位置。也就是说,拨杆257构成可在上下方向上移动的倾斜式换档杆。注意,例如,拨杆257可以是在上下方向上直线移动的直线型或在上下方向上以z字形移动的柱型。
203.从顶部起按照倒档(r)、空档(n)、前进档(d)和自动驾驶档(a)的顺序来布置拨杆257的换档位置的设定顺序。也就是说,当拨杆257从顶部起在向下方向上移动时,换档位置按照r、n、d和a的顺序切换。当拨杆257从底部起在向上方向上移动时,换档位置按照a、d、n和r的顺序切换。
204.此外,在拨杆257的远端处,设置可以在拨杆257的轴向方向上按下的按钮258。当按下按钮258时,车辆1的换档位置切换到停车档(p)。
205.此外,在拨杆257的侧面上沿圆周方向以圆周状设置指示器259。指示器259布置在当从驾驶员座椅251fl观看时可从方向盘253的轮辐之间的间隙看到的位置处。
206.指示器259的颜色根据所设定的换档位置而改变。例如,在换档位置被设定为停车档的情况下,指示器259为红色。在换档位置被设定为行驶档的情况下,指示器259为白色。在换档位置被设定为自动驾驶并且可以自动驾驶的情况下,指示器259为绿色。在换档位置
被设定为自动驾驶并且自动驾驶处于操作中的情况下,指示器259为蓝色。
207.注意,如图13中的虚线所示,指示器259可以布置在当从驾驶员座椅251fl观看时方向盘253的外周边外部。因此,指示器259变得从方向盘253外部可见。此外,指示器259可以布置在实线和虚线的两个位置处。
208.以此方式,通过在用于切换换档位置的操作体(拨杆257)上设置指示器259,驾驶员可以直观地理解由指示器259的颜色所表示的含义,并且直观地且可靠地识别换档位置。
209.此外,例如,可以在中央显示器252等上显示换档位置的设定状态。在这种情况下,例如,按照拨杆257的设定方向的顺序显示换档位置。也就是说,从顶部起按照倒档(r)、空档(n)、前进档(d)和自动驾驶档(a)的顺序显示换档位置。
210.此外,例如,可以在拨杆257的轴向方向上的远端或中间设置围绕轴(圆周方向)旋转的转盘(dial),并且可以通过旋转该转盘来切换换挡位置。
211.此外,如图11中所示,空调(a/c)的出风口260fc、出风口260fl和出风口260fr布置在环路l11上。具体地,出风口260fr布置在驾驶员座椅251fl和乘客座椅251fr之间的中央显示器252的正下方。出风口260fl布置在驾驶员座椅251fl侧的车门212fl的接合部分附近的中央显示器252的正下方。出风口260fr布置在乘客座椅251fr侧的车门212fr的接合部分附近的中央显示器252的正下方。
212.此外,如图12中所示,出风口260fc设置有用于改变风向的旋钮261cl和旋钮261cr。如图12中所示,出风口260fl设置有用于改变风向的旋钮261fl。尽管未示出,但是出风口260fr在与出风口260fl的旋钮261fl的位置相似的位置处设置有用于改变风向的旋钮261fr。以此方式,旋钮261cl、旋钮261cr、旋钮261fl和旋钮261fr设置在环形线l11上。
213.此外,如图12中所示,包括用于执行前照灯203的各种设定的开关等的操作单元262在方向盘253后面的右侧布置在环形线l11上。
214.此外,开门器布置在环形线l11上。例如,如图11中所示,开门器263fl在驾驶员座椅251fl侧的车门212fl的前后方向的中央附近布置在环形线l11上。类似地,开门器263fr在乘客座椅251fr侧的车门212fr的前后方向的中央附近布置在环形线l11上。
215.如上所述,通过沿环形线l11布置用于各种用户接口的设备等,从驾驶员的视线中去除妨碍驾驶的噪声,并且提供有助于专注于驾驶的环境。此外,通过将各种设备聚集在环形线l11附近,可以直观地识别各种设备的位置并且进行操作。此外,由于将各种设备聚集在环形线l11附近并且布置了环行灯256,因此给出了观看车辆1内部的印象。此外,减少了诸如驾驶员之类的乘客的视线在上下方向上的移动,并且抑制了乘客的晕车。
216.图14是从左斜后方观看的驾驶员座椅251fl的图。
217.平板计算机终端264l设置在驾驶员座椅251fl的后表面上,更具体地,设置在驾驶员座椅251fl的头枕的后表面上。
218.例如,平板计算机终端264l向后部座椅251bl上的乘客呈现与信息娱乐相关的信息,并且接受对所呈现的信息的操作。此外,例如,平板计算机终端264l在紧急、危险等时候显示警报。
219.注意,例如,尽管未示出,但是在乘客座椅251fr的后表面上设置了与平板计算机终端264l类似的平板计算机终端264r。
220.此外,例如,可以在平板计算机终端264l和平板计算机终端264r附近单独设置tof
相机。结果,可以基于由tof相机捕获的图像来执行例如对正在操作平板计算机终端264l和平板计算机终端264r的乘客的识别等。
221.接下来,将参考图15至图19描述用于在驾驶员座椅251fl(坐在驾驶员座椅251fl上的驾驶员)的方向上进行图像捕获的tof相机的安装位置的示例。
222.如图15和图16中所示,例如,在数字车内后视镜(digital room mirror)265周围的安装位置p1处安装tof相机。
223.数字车内后视镜265用于检查车辆1的后方以代替传统的后视镜(rearview mirror),并且也被称为智能车内后视镜(smart roommirror)或数字后视镜(digital rear mirror)。如图11等中所示,与传统的后视镜类似,数字车内后视镜265在挡风玻璃211的上端和中央附近设置在车辆1比挡风玻璃211稍靠后的侧,并且布置在中央显示器252的中央部分上方。此外,如图15和图16中所示,数字车内后视镜265经由连接件266在顶棚附近安装在驾驶员座椅251fl的右斜前方。
224.安装位置p1布置在车辆1的顶棚上,靠近连接件266的左侧表面的后端并且靠近数字车内后视镜265的左上角。
225.图17示意性地示出了在安装位置p1处安装tof相机的情况下由tof相机捕获的图像的示例。
226.通过将tof相机安装在安装位置p1,可以捕获坐在驾驶员座椅251fl上的驾驶员281的上半身的图像,就像从右斜前方和上方向下看一样。结果,可以从右斜前方和上方捕获驾驶员281的面部的图像,并且例如,识别单元73(图1)可以识别驾驶员281的视线。此外,可以在俯视图中捕获包括方向盘253的驾驶员281的上半身的图像,并且例如,可以在识别单元73中识别驾驶员281的姿势。此外,由于在驾驶员281和数字车内后视镜265之间将会出现障碍物的概率低,因此可以稳定地识别驾驶员281的视线和姿势。
227.然而,图18示出了在tof相机布置在方向盘253处或布置在方向盘253附近的情况下由tof相机捕获的图像的示例。
228.在这种情况下,捕获驾驶员281的面部附近的图像,就像从前面向上看一样。因此,识别单元73可以识别驾驶员281的视线。然而,假设诸如驾驶员281的手之类的障碍物容易出现在驾驶员281和方向盘253之间,并且容易发生视线无法被识别的情况。此外,由于没有捕获到驾驶员281的整个上半身的图像,因此识别单元73难以识别驾驶员281的姿势。
229.图19示出了tof相机的安装位置的变型例。
230.例如,tof相机可以安装在数字车内后视镜265左端的安装位置p2处。
231.例如,在车辆1的顶棚上,tof相机可以安装在安装位置p3处,该安装位置p3在数字车内后视镜265后面(相对于数字车内后视镜265在车辆1的前部),并且相对于数字车内镜265更靠近驾驶员座椅251fl(相对于数字车内后视镜265更靠近左侧)。
232.例如,在车辆1的顶棚上,tof相机可以安装在安装位置p4处,该安装位置p4在数字车内后视镜265前面(相对于数字车内后视镜265在车辆1的后部),并且相对于数字车内后视镜265更靠近驾驶员座椅251fl(相对于数字车内后视镜265更靠近左侧)。
233.即使tof相机安装在安装位置p2到p4中的任何一个处,也可以基于由tof相机捕获的图像来识别驾驶员的视线和姿势,类似于tof相机安装在安装位置p1处的情况。
234.注意,代替数字车内后视镜265,可以使用传统的光学镜。此外,可以使用与tof相
机不同的方式的相机。
235.此外,例如,捕获坐在乘客座椅251fr上的乘客的图像的tof相机可以安装在相对于捕获驾驶员的图像的相机而左右对称的位置处。
236.《信息处理单元351的配置示例》
237.图20是示出由图1中的处理器21、hmi 31等实现的信息处理单元351的配置示例的框图。
238.信息处理单元351包括图像处理单元361、元数据分配单元362和输出控制单元363。
239.图像处理单元361对通过相机51获得的运动图像数据执行各种类型的图像处理和编辑。此外,图像处理单元361对通过诸如雷达52和lidar 53之类的除相机之外的光学传感器获得的传感器数据进行成像。
240.元数据分配单元362将元数据分配给通过相机51获得的运动图像数据。
241.输出控制单元363执行hmi 31中的视觉信息、听觉信息和触觉信息的输出控制。例如,输出控制单元363控制来自中央显示器252、平板计算机终端264l、平板计算机终端264r和方向盘253的照明装置254的视觉信息的输出。例如,输出控制单元363控制来自扬声器255fl到255br和座椅扬声器的听觉信息(声音)的输出。
242.《车辆1的操作》
243.接下来,将参考图21至图36描述车辆1的操作的示例。
244.注意,在下文中,车门212fl、车门212fr、车门212bl和车门212br在不需要彼此单独区分的情况下被简单地称为车门212。
245.《照明系统的发光模式》
246.首先,将参考图21至图30描述车辆1的照明系统的发光模式的示例。
247.灯控制单元85(图1)执行对车辆外部的灯和车辆内部的灯的协同控制。
248.具体地,图21至图30示出了辅助灯201l、辅助灯201r、日间行车灯202l、日间行车灯202r、前照灯203l、前照灯203r、转向信号灯204l、转向信号灯204r、辅助灯205fl、辅助灯205fr、辅助灯205bl、辅助灯205br、尾灯206l、尾灯206r、尾灯206cl、尾灯206cr、制动灯207l、制动灯207r、环形灯256和主灯401的发光模式的示例。
249.注意,主灯401包括大致沿车辆1内部的顶棚的外周边布置的led,并且用作车辆内部的主照明装置。对于每个led,可以单独控制开/关、颜色、亮度等。
250.此外,图21至图30整体地示出了前照灯203lu和前照灯203ld、前照灯203ru和前照灯203rd、制动灯207lu和制动灯207ld、以及制动灯207ru和制动灯207rd,而没有彼此区分。
251.注意,在下文中,除非另有规定,否则假设辅助灯201l、辅助灯201r、日间行车灯202l、日间行车灯202r、前照灯203l、前照灯203r、转向信号灯204l、转向信号灯204r、辅助灯205fl、辅助灯205fr、辅助灯205bl和辅助灯205br发出白色光。在下文中,除非另有规定,否则假设尾灯206l、尾灯206r、尾灯206cl、尾灯206cr、制动灯207l和制动灯207r发出红色光。在下文中,除非另有规定,否则假设环形灯256和主灯401发出橙色光。
252.此外,在下文中,基本上,在每个图中,假设点亮的灯被填充为黑色,而熄灭的灯被填充为白色。
253.《在通电时》
254.图21和图22示出了当车辆1的电源接通时的发光模式的示例。图21示出了当在通电时要点亮的所有灯都点亮时的状态。图22示出了在通电时的最终灯状态。
255.当车辆1的电源断开时,所有灯都熄灭。
256.于是,当车辆1的电源接通时,辅助灯201l、辅助灯201r、日间行车灯202l、日间行车灯202r、转向信号灯204l、转向信号灯204r、辅助灯205fl、辅助灯205fr、辅助灯205bl、辅助灯205br、尾灯206l、尾灯206r、尾灯206cl,并且尾灯206cr点亮。
257.此时,如图中的箭头a11和a12所示,灯点亮,就好像光从车身的前表面的中央朝向车身的后表面的中央在车身的周边流动一样。
258.具体地,首先,在辅助灯201l的右端处和在辅助灯201r的左端处的徽标部分被点亮一段时间。
259.接下来,从辅助灯201l的右端到左端依次点亮led。接下来,从日间行车灯202l的右端到左端依次点亮led。接下来,从转向信号灯204l的前端到后端依次点亮led。接下来,从辅助灯205fl的前端到后端依次点亮led。接下来,从辅助灯205bl的前端到后端依次打开led。接下来,从尾灯206l的左端到右端依次点亮led。最后,从尾灯206cl的左端到右端依次点亮led。因此,如箭头a11所示,每个灯都点亮,就像光从车身的前表面的中央逆时针流向车身的后表面的中央一样。
260.类似地,从辅助灯201r的左端到右端依次点亮led。接下来,从日间行车灯202r的左端到右端依次点亮led。接下来,从转向信号灯204r的前端到后端依次点亮led。接下来,从辅助灯205fr的前端到后端依次点亮led。接下来,从辅助灯205br的前端到后端依次点亮led。接下来,从尾灯206r的右端到左端依次点亮led。最后,从尾灯206cr的右端到左端依次点亮led。因此,如箭头a12所示,每个灯都点亮,就像光从车身的前表面的中央顺时针流向车身的后表面的中央一样。
261.同时执行逆时针将灯点亮和顺时针将灯点亮。
262.接下来,环形灯256和主灯401被点亮。此时,环形灯256和主灯401被点亮以整体地逐渐变亮。
263.然后,当完成环形灯256和主灯401的点亮时,获得图21中所示的状态。
264.接下来,如图22中所示,一些灯熄灭。此时,如图中的箭头a13和a14所示,从车身的左侧表面前部和右侧表面前部到后表面的中央依次熄灭灯。
265.具体地,从转向信号灯204l的前端到后端依次熄灭led。接下来,从辅助灯205fl的前端到后端依次熄灭led。接下来,从辅助灯205bl的前端到后端依次熄灭led。接下来,从尾灯206l的左端到右端依次熄灭led。最后,从尾灯206cl的左端到右端依次熄灭led。因此,如箭头a13所示,从车身的左侧表面前部到车身的后表面的中央逆时针依次熄灭各个灯。
266.类似地,从转向信号灯204r的前端到后端依次熄灭led。接下来,从辅助灯205fr的前端到后端依次熄灭led。接下来,从辅助灯205br的前端到后端依次熄灭led。接下来,从尾灯206r的右端到左端依次熄灭led。最后,从尾灯206cr的右端到左端依次熄灭led。因此,如箭头a14所示,从车身的右侧表面前部到车身的后表面的中央顺时针依次熄灭各个灯。
267.同时执行逆时针方向将灯熄灭和顺时针将灯熄灭。
268.《在行驶期间和在前照灯203熄灭时》
269.图23示出了在车辆1正在行驶(换档位置被设定为前进档或自动驾驶档)并且前照
灯203熄灭的情况下的发光模式的示例。
270.在此状态下,辅助灯201l、辅助灯201r、日间行车灯202l和日间行车灯202r点亮。
271.注意,由于诸如法律法规之类的限制,日间行车灯202l和日间行车灯202r在车辆1的行驶期间始终点亮。然而,由于诸如法律法规之类的限制,辅助灯201l和辅助灯201r在车辆1的行驶期间需要变暗或熄灭。因此,辅助灯201l和辅助灯201r的亮度被设定为比通常低。
272.《在行驶期间和在前照灯203点亮时》
273.图24示出了在车辆1正在行驶(换档位置被设定为前进档或自动驾驶档)并且前照灯203点亮的情况下的发光模式的示例。
274.当将图24与图23进行比较时,存在的区别是前照灯203l、前照灯203r、尾灯206l、尾灯206r、尾灯206cl和尾灯206cr点亮。也就是说,尾灯206l、尾灯206r、尾灯206cl和尾灯206cr根据前照灯203l和前照灯203r的点亮而点亮。
275.《在制动操作时》
276.图25示出了在操作制动器时的发光模式的示例。
277.当将图25的状态与图23的状态进行比较时,存在的区别是制动灯207l和制动灯207r点亮。也就是说,当操作制动器时,制动灯207l和制动灯207r点亮。
278.《在转向信号灯操作时》
279.图26示出了在左侧转向信号灯正在操作的情况下的发光模式的示例。
280.当将图26与图23进行比较时,存在的区别是日间行车灯202l和尾灯206l的颜色改变并且转向信号灯204l闪烁。
281.具体地,led从日间行车灯202l的右端到左端依次从白色变为橙色。在日间行车灯202l的所有led变为橙色后,从转向信号灯204l的前端到后端依次以橙色点亮led。
282.与此同时,led从尾灯206l的右端到左端依次从白色变为橙色。
283.接下来,led从日间行车灯202l的右端到左端依次从橙色变为白色。在日间行车灯202l的所有led变为白色后,从转向信号灯204l的前端到后端依次熄灭led。
284.与此同时,led从尾灯206l的右端到左端依次从橙色变为白色。
285.以下,重复类似的操作。
286.《在车门212打开的情况下》
287.图27示出了在车辆1的任何车门212打开的情况下的发光模式的示例。
288.此时,辅助灯201l、辅助灯201r、日间行车灯202l、日间行车灯202r、尾灯206l、尾灯206r、尾灯206cl、尾灯206cr、环形灯256和主灯401点亮。
289.《当车门212关闭时》
290.图28示出了当车辆1的任何车门212打开的状态改变为所有车门212关闭的状态时的发光模式的示例。
291.当将图28的状态与图29的状态进行比较时,存在的区别是主灯401熄灭。也就是说,当车门212关闭时,主灯401熄灭。
292.《在停车时》
293.图29示出了在车辆1的换档位置被设定为停车的情况下的发光模式的示例。
294.在这种情况下,辅助灯201l、辅助灯201r、日间行车灯202l、日间行车灯202r、转向
信号灯204l、转向信号灯204r、尾灯206l、尾灯206r、尾灯206cl、尾灯206cr和环形灯256点亮。
295.《在断电时》
296.图30示出了当从车辆1的换档位置被设定为停车的状态断开电源时的发光模式的示例。
297.在这种情况下,辅助灯201l、辅助灯201r、日间行车灯202l、日间行车灯202r、转向信号灯204l、转向信号灯204r、尾灯206l、尾灯206r、尾灯206cl、尾灯206cr和环形灯256熄灭。
298.此时,如箭头a15和a16所示,灯熄灭,就像从车身的侧表面流向车身的前表面的中央一样。此外,如箭头a17和a18所示,灯熄灭,就像从车身的侧表面流向车身的后表面的中央一样。
299.具体地,从转向信号灯204l的后端到前端依次熄灭led。接下来,从日间行车灯202l的左端到右端依次熄灭led。接下来,从辅助灯201l的左端到右端依次熄灭led。
300.与此同时,从转向信号灯204r的后端到前端依次关闭led。接下来,从日间行车灯202r的右端到左端依次熄灭led。接下来,从辅助灯201r的右端到左端依次熄灭led。
301.与此同时,从尾灯206l的左端到右端依次熄灭led。接下来,从尾灯206cl的左端到右端依次熄灭led。
302.与此同时,从尾灯206r的右端到左端依次熄灭led。接下来,从尾灯206cr的右端到左端依次熄灭led。
303.此外,环形灯256逐渐熄灭。
304.《当人接近车辆1周围时》
305.接下来,尽管未示出,但是例如将描述当识别单元73检测到人接近车辆1时的发光模式的示例。
306.例如,在靠近接近的人(靠近接近的地方)的位置处的灯点亮或闪烁。具体地,例如,当检测到人接近车门212fl附近时,在车门212fl附近的转向信号灯204l和辅助灯205fl点亮或闪烁。此外,例如,在转向信号灯204l和辅助灯205fl点亮之后,可以依次点亮其他灯。
307.此外,例如,在检测到人接近的情况下,无论人接近的位置如何,灯可以总是以类似的模式点亮或闪烁。例如,灯可以点亮,就像光在车辆周围流动一样。
308.此外,例如,可以根据接近的人来改变灯的点亮或闪烁的模式(例如,颜色、图案等)。例如,在接近的人被识别为预先登记的用户(例如,驾驶员、其家庭成员等)的情况下,白色光可以闪烁。然而,例如,在接近的人的识别失败的情况下(在接近的人未被识别为预先登记的用户的情况下),红色光可以闪烁。
309.注意,例如,在检测到登记用户的接近的情况下,车身系统控制单元84可以自动解锁车门。
310.此外,例如,用于通过人的接近来点亮或闪烁灯的条件可以受到限制。例如,只有在车辆1的电源断开的情况下或在车辆1中没有人的情况下,才可以通过人的接近来点亮或闪烁灯。
311.如上所述,在检测到人的接近的情况下,例如通过点亮或闪烁外部灯,向周围环境
宣传车辆1正在监视周围环境的状态,并且可以防止车辆1被盗和毁坏。此外,在检测到人的接近的情况下,例如,通过点亮或闪烁车辆内部的灯,可以向周围环境宣传车辆1也在监视车辆内部。
312.《方向盘253的照明装置254的发光模式》
313.接下来,将描述方向盘253的照明装置254的发光模式。
314.例如,灯控制单元85基于车辆1的状况、车辆1周围的状况或乘客的状况中的至少一个,以与状况相应的模式来点亮或闪烁照明装置254。照明装置254的发光模式由例如颜色、亮度、闪烁模式、光移动或发光区域中的至少一个来定义。
315.具体地,例如,当车辆1准备好自动驾驶时,多个短光带围绕照明装置254旋转大约一圈。然后,整个照明装置254闪烁。因此,驾驶员可以可靠地识别自动驾驶已准备就绪。
316.此外,例如,在车辆1通过自动驾驶变更车道的情况下,首先,点亮整个照明装置254。此后,在照明装置254熄灭之后,照明装置254的led在车辆1为了车道变更而移动的方向上闪烁。然后,在车道变更结束后,整个照明装置254点亮并且然后熄灭。以此方式,从车道变更之前直到车道变更完成为止给出车道变更的通知,这使得可以给乘客安全感。
317.此外,例如,在由于接近障碍物、打瞌睡等引起驾驶员的注意的情况下,照明装置254的上部以红色闪烁。因此,驾驶员可以快速感知并且避免危险。
318.此外,例如,在执行语音识别的情况下,多个光带在照明装置254的上部左右移动。因此,驾驶员可以识别出语音识别功能正在正常运行。
319.《图像捕获处理》
320.接下来,将参考图31的流程图来描述由车辆1执行的图像捕获处理。
321.例如,当车辆1的电源接通时,该处理开始,并且当车辆1的电源断开时,该处理结束。
322.在步骤s1中,相机51捕获车辆1的周围环境和内部的图像。具体地,相机51包括多个相机,并且每个相机捕获车辆1的周围环境或内部(室内)的图像。每个相机分别将通过图像捕获获得的运动图像数据提供给信息处理单元351。
323.在步骤s2中,图像处理单元361根据需要执行图像处理。
324.例如,图像处理单元361在运动图像数据的每个帧上叠加视觉信息,如稍后参考图32至图35所述。
325.此外,例如,图像处理单元361基于来自车内传感器26和车辆传感器27的传感器数据,对运动图像数据的每个帧执行诸如噪声消除之类的图像处理。例如,在下雨的情况下,图像处理单元361去除帧中的诸如雨滴之类的噪声。
326.在步骤s3中,元数据分配单元362将元数据分配给运动图像数据。
327.例如,元数据分配单元362将关于图像捕获地点、图像捕获日期和时间、车辆1的状况、车辆内部状况、周围环境状况等中的至少一个的元数据分配给在移动期间等捕获的每个运动图像数据。
328.关于图像捕获地点的元数据包括例如在图像捕获时的车辆1的位置、图像捕获方向、用于图像捕获的相机的位置等中的至少一个。
329.关于图像捕获日期和时间的元数据包括例如在图像捕获时的日期、时间等中的至少一个。
330.关于车辆1的状况的元数据包括例如车辆1的速度、加速度、行驶方向、目的地或状态(例如,有无故障、有无事故、充电量等)中的至少一个。
331.关于车辆内部的状况的元数据包括例如乘客的识别信息(例如,姓名、id等)、乘客的座椅的位置、乘客的状况(例如,动作内容、打瞌睡等)、车辆内部的对话的语音识别结果、车辆内部的活动程度等。活动程度基于例如车辆中的对话的音量、乘客的移动等来设定。
332.关于周围环境状况的元数据包括例如天气、温度、湿度、亮度、周围对象(例如,其他车辆、行人、障碍物、交通标志、地标等)的位置和类型、事件(例如,事故、施工等)的有无发生和类型等中的至少一个。
333.此外,例如,元数据分配单元362可以将由用户(乘客)输入的元数据分配给运动图像数据。例如,可以在方向盘253上设置电影按钮,并且驾驶员可以在捕获期望存储运动图像数据的场景等的情况下按下电影按钮。作为捕获期望存储运动图像数据的场景等的情况,例如,假设车辆1周围的风景良好的情况、发生诸如事故之类的故障的情况等。例如,元数据分配单元362将表示需要存储的元数据分配给在由用户使用电影按钮指定的时段内捕获的运动图像数据。
334.注意,可以自由设定用于分配元数据的单位。例如,为每个帧、包括多个帧的每个单位或每个运动图像数据分配元数据。此外,根据元数据的类型,用于分配元数据的单位可以是可变的。
335.在步骤s4中,车辆1累积运动图像数据。具体地,图像处理单元361使记录单元28存储运动图像数据。
336.注意,此时,在车辆1周围和内部记录的音频数据可以与运动图像数据一起累积。
337.在步骤s5中,车辆1显示运动图像。具体地,输出控制单元363使hmi 31基于运动图像数据来显示运动图像。
338.例如,将图32至图35中所示的运动图像显示在中央显示器252上。
339.图32示出了例如在显示模式被设定为对象检测模式的情况下显示的运动图像的示例。在该示例中,示出了选择车辆和人作为检测对象的示例。然后,在通过捕获车辆1前方的图像而获得的运动图像中显示围绕检测到的车辆的框501和围绕检测到的人的框502。此外,在框501和框502中显示表示检测到的对象的类型的文字(汽车和人)。
340.图33示出了例如在显示模式被设定为预测模式的情况下显示的运动图像的示例。在该示例中,运动图像中检测到的运动对象(在该示例中为人)在0.5秒后的预测位置被显示。在该示例中,人的当前位置由虚线表示,以及人在0.5秒后的预测位置由实线表示并且被框511围绕。
341.图34示出了例如在显示模式被设定为搜索模式的情况下显示的运动图像的示例。这里,示出了搜索和显示可以停车的位置的示例。具体地,显示表示可以停车的位置的框521。
342.注意,例如,可以显示可以停车的多个位置。此外,例如,可以通过鸟瞰图来显示可以停车的位置。
343.图35示出了例如在显示模式被设定为查找模式的情况下显示的运动图像的示例。这里,示出了如下示例:搜索预先登记的人,并且显示检测到的人。具体地,在运动图像中显示围绕预先登记的人的框531。此外,在框531中显示检测到的人的名字(樱花)。
344.注意,例如,在由乘客(诸如驾驶员)选择的方向(例如,向前、向后、向左、向右等)上的运动图像可以显示在中央显示器252上。此外,例如,车辆1周围360度的运动图像可以在滚动的同时显示在中央显示器252上。
345.此外,例如,通过雷达52或lidar 53获得的传感器数据可以被成像并且显示在中央显示器252上。此外,基于通过相机51、雷达52和lidar 53当中的两种或多种类型的传感器获得的数据的视觉信息可以被叠加并且显示在运动图像上。
346.此外,例如,可以基于路径规划将行驶规划方向等叠加并且显示在运动图像上。
347.此外,例如,根据通过车辆对车辆通信获得的信息等预测的其他车辆的运动可以被叠加并且显示在运动图像上。
348.此后,处理返回到步骤s1,并且重复执行步骤s1到s5的处理。
349.《运动图像编辑处理》
350.接下来,将参考图36描述由车辆1执行的运动图像编辑处理。
351.例如,当将编辑运动图像的指令输入到hmi 31时,该处理开始。编辑运动图像的指令包括例如捕获作为编辑对象的运动图像的时段(在下文中被称为编辑对象时段)、用于提取要包括在运动图像中的帧的条件等。
352.在步骤s51中,图像处理单元361编辑运动图像。
353.例如,图像处理单元361基于元数据等从在编辑对象时段内捕获的每个运动图像数据(在下文中被称为捕获的运动图像数据)中提取要包括在编辑后的运动图像数据(在下文中被称为编辑后的运动图像数据)中的帧。
354.例如,图像处理单元361提取被分配了表示需要存储的元数据的帧。
355.此外,例如,图像处理单元361基于元数据提取满足给定条件的帧。
356.例如,图像处理单元361基于编辑对象时段内的车辆1的路径和元数据来提取帧。例如,图像处理单元361基于地图数据和包括在运动图像数据的元数据中的位置信息来检测编辑对象时段内的车辆1的路径。然后,例如,在车辆1在沿海洋的道路上行驶的情况下,图像处理单元361优先提取通过在海洋的方向上进行图像捕获而获得的帧。例如,在车辆1在诸如山之类的高地上行驶的情况下,图像处理单元361优先提取通过在俯视周围环境的方向上进行图像捕获而获得的帧。此外,例如,图像处理单元361基于车辆1的行驶方向、转弯方向等,优先提取通过对车辆1周围的地标等进行图像捕获而获得的帧。
357.例如,图像处理单元361基于元数据来提取在特定事件发生时的帧。例如,在车辆1卷入事故的情况下,或者在车辆1周围发生事故的情况下,图像处理单元361优先提取事故前后的时间范围中的帧。此外,例如,图像处理单元361优先提取通过在发生事故的方向上进行图像捕获而获得的帧。
358.例如,在基于元数据中包括的活动程度检测到车辆中的兴奋的情况下,图像处理单元361优先提取通过对车辆内部进行图像捕获而获得的帧。此外,例如,图像处理单元361还提取与所提取的车辆中的帧相对应的音频数据。
359.此外,例如,输出控制单元363可以使中央显示器252、平板计算机终端264l等显示实际运动图像和运动图像数据的列表,并且图像处理单元361可以基于用户的指令编辑运动图像。
360.例如,用户可以选择期望要包括在编辑后的运动图像数据中的运动图像数据或
帧。在这种情况下,例如,可以使得能够在中央显示器252、平板计算机终端264l等上显示的运动图像的帧上叠加视觉信息,例如各种类型的信息、视觉效果和涂鸦。
361.然后,图像处理单元361例如通过组合所提取的帧来生成编辑后的运动图像数据。例如,图像处理单元361通过按时间序列连接所提取的帧、在同一帧中排列或叠加多个帧等来生成编辑后的运动图像数据。此外,例如,图像处理单元361基于元数据根据需要在所提取的帧上叠加视觉信息。
362.在步骤s52中,车辆1存储运动图像数据。例如,图像处理单元361使记录单元28存储编辑后的运动图像数据。此外,例如,经由通信单元22,图像处理单元361将编辑后的运动图像数据发送给服务器或由乘客拥有的信息处理终端(例如,智能电话、平板计算机终端、个人计算机等)来存储。
363.此后,运动图像编辑处理结束。
364.以此方式,可以容易地编辑通过捕获车辆1的周围环境和内部而获得的运动图像。结果,例如,可以容易地生成记录了旅行回忆的运动图像数据、提取了具有良好风景的场景的运动图像数据、记录了事故情况的运动图像数据等。
365.《《3.变型例》》
366.以下,将描述本技术的上述实施例的变型例。
367.例如,被分配了元数据的编辑前的所捕获的运动图像数据可以被存储或复制到车辆1外部,并且车辆1外部的设备(例如,服务器(云)、智能电话、平板计算机终端、个人计算机等)可以编辑运动图像。此外,例如,车辆1外部的设备和车辆1可以协作以编辑运动图像。此外,例如,元数据可以由车辆1外部的设备来分配。
368.此外,在以上描述中,已经描述了环形线l1的前线和尾线被照亮的示例。然而,例如,考虑到设计、法律法规等,前线和尾线可以不被照亮。
369.此外,在以上描述中,描述了前线的中央部分和尾线的中央部分被分开的示例。然而,例如,考虑到设计等,中央部分可以彼此连接而不被分开。
370.此外,例如,可以在前照灯203中布置诸如相机、雷达或lidar之类的光学传感器。
371.此外,在以上描述中,已经描述了车辆1是左舵驾驶车辆的示例,但是不用说,本技术也可以应用于右舵驾驶车辆。在将本技术应用于右舵驾驶车辆的情况下,根据右舵方向盘适当地改变车辆的外部和内部的上述布局。
372.此外,可以应用本技术的车辆类型不受特别限制。此外,除了车辆之外,本技术还可以应用于诸如个人移动装置、飞机、船舶、建设机械、农业机械等移动设备。此外,可以应用本技术的移动设备包括例如在没有人登机的情况下捕获周围环境的图像的移动设备,诸如无人机或机器人。
373.《《4.其他》》
374.《计算机配置示例》
375.上述一系列处理可以通过硬件或软件执行。在通过软件执行一系列处理的情况下,在计算机(例如,处理器21等)中安装构成软件的程序。
376.注意,由计算机执行的程序可以是根据本说明书中描述的顺序按时间序列执行处理的程序,或者可以是并行地或在需要的定时(例如在进行调用时)执行处理的程序。
377.此外,在本说明书中,系统指的是多个组件(设备、模块(部件)等)的集合,并且所
有组件是否在同一壳体中无关紧要。因此,封装在单独壳体中并且经由网络连接的多个设备、以及具有封装在一个壳体中的多个模块的单个设备都是系统。
378.此外,本技术的实施例不限于上述实施例,并且可以在不偏离本技术的范围的情况下进行各种修改。
379.例如,本技术可以具有云计算配置,其中一个功能由多个设备经由网络共享并且共同地处理。
380.此外,上述流程图中描述的每个步骤可以由一个设备执行,也可以由多个设备共享和执行。
381.此外,在一个步骤包括多个处理的情况下,包括在一个步骤中的多个处理可以由一个设备执行,也可以由多个设备共享和执行。
382.《配置的组合示例》
383.本技术还可以具有以下配置。
384.(1)一种车辆,包括:
385.前线,所述前线在车身的前表面上沿车辆宽度方向延伸;以及
386.前照灯,所述前照灯被布置在所述前表面的左侧和右侧,被所述前线上下分开,以及被配置成从所述前线上方的部分输出近光并且从所述前线下方的部分输出远光。
387.(2)根据上述(1)所述的车辆,其中,
388.所述前线构成围绕所述车身的周边的第一环形线的一部分。
389.(3)根据上述(2)所述的车辆,还包括:
390.多个灯,所述多个灯沿第一环形线被布置在所述车身的周边;以及
391.灯控制单元,所述灯控制单元被配置成控制所述多个灯。
392.(4)根据上述(3)所述的车辆,其中,
393.在人接近所述车辆的情况下,所述灯控制单元点亮或闪烁所述多个灯中的至少一些灯。
394.(5)根据上述(4)所述的车辆,其中,
395.所述灯控制单元在所述多个灯当中点亮或闪烁在靠近人的位置处的灯。
396.(6)根据上述(4)或(5)所述的车辆,其中,
397.所述灯控制单元根据人来改变在所述多个灯当中点亮或闪烁灯的模式。
398.(7)根据上述(4)至(6)中任一项所述的车辆,还包括:
399.车身系统控制单元,所述车身系统控制单元被配置成在人提前登记的情况下解锁车门。
400.(8)根据上述(3)至(7)中任一项所述的车辆,还包括:
401.环形灯,所述环形灯在与第一环形线大致相同的高度处围绕所述车辆的内部的至少一部分,其中,
402.所述光控制单元执行对所述多个灯和所述环形灯的协同控制。
403.(9)根据上述(3)至(8)中任一项所述的车辆,其中,
404.所述前线包括在前表面上沿车辆宽度方向延伸的前灯。
405.(10)根据上述(9)所述的车辆,其中,
406.所述前灯在中央处被分开,并且光学传感器被布置在分开的部分处。
407.(11)根据上述(10)所述的车辆,其中,
408.所述分开的部分构成徽标的一部分。
409.(12)根据上述(3)至(11)中任一项所述的车辆,其中,
410.所述多个灯包括在所述车身的后表面上沿车辆宽度方向延伸的尾灯。
411.(13)根据上述(12)所述的车辆,还包括:
412.制动灯,所述制动灯被布置在所述后表面的左侧和右侧,并且被所述尾灯上下分开。
413.(14)根据上述(12)或(13)所述的车辆,其中,
414.所述尾灯在中央处被分开,并且光学传感器被布置在分开的部分处。
415.(15)根据上述(14)所述的车辆,其中,
416.所述分开的部分构成徽标的一部分。
417.(16)根据上述(3)至(15)中任一项所述的车辆,其中,
418.所述多个灯包括转向信号灯。
419.(17)根据上述(2)至(16)中任一项所述的车辆,其中,
420.光学传感器被布置在第一环形线与a柱的延长线或c柱的延长线的交叉点附近。
421.(18)根据上述(17)所述的车辆,其中
422.所述光学传感器包括lidar。
423.(19)根据上述(17)或(18)所述的车辆,其中,
424.转向信号灯被布置在所述光学传感器上方,所述光学传感器被布置在第一环形线与a柱的延长线的交叉点附近。
425.(20)根据上述(2)至(19)中任一项所述的车辆,其中,
426.车门把手在所述车身的侧表面上被布置在第一环形线附近。
427.(21)根据上述(20)所述的车辆,还包括:
428.通信设备,所述通信设备被布置在所述车门把手处或所述车门把手附近,并且被配置成执行短距离无线通信。
429.(22)根据上述(21)所述的车辆,还包括:
430.辅助灯,所述辅助灯被配置成照亮所述车门把手的附近。
431.(23)根据上述(2)至(22)中任一项所述的车辆,还包括:
432.第二环形线,第二环形线沿设置在所述车身中的车窗的下端围绕所述车身的周边。
433.(24)根据上述(23)所述的车辆,其中,
434.第二环形线上方和下方的所述车身的颜色不同。
435.(25)根据上述(1)至(24)中任一项所述的车辆,其中,
436.所述前线的端部向所述车身的后方弯曲,并且在贯穿所述车身的方向上延伸。
437.(26)根据上述(1)至(25)中任一项所述的车辆,还包括:
438.被布置在徽标的各部分之间的光学传感器,所述徽标被布置在所述前线的中央处。
439.(27)根据上述(1)至(26)中任一项所述的车辆,还包括:
440.被安装在所述前照灯中的光学传感器。
441.注意,本说明书中描述的效果仅为示例并且不受限制,以及可以存在其他效果。
442.参考标记列表
443.1 辆车
444.11 车辆控制系统
445.21 处理器
446.31 hmi
447.51 相机
448.52 雷达
449.53 lidar
450.73 识别单元
451.84 车身系统控制单元
452.85 灯控制单元
453.201 辅助灯
454.202 日间行车灯
455.203 前照灯
456.204 转向信号灯
457.205 辅助灯
458.206 尾灯
459.207 制动灯
460.252 中央显示器
461.253 方向盘
462.254 照明装置
463.255fl至br 扬声器
464.256 环形灯
465.257 拨杆
466.258 按钮
467.259 指示器
468.260fc至260fr 出风口
469.261cl至261fr 旋钮
470.262 操作单元
471.263fl、263fr 开门器
472.265 平板计算机终端
473.265 数字车内后视镜
474.266 连接件
475.351 信息处理单元
476.361 图像处理单元
477.362 元数据分配单元
478.363 输出控制单元
479.401 主灯
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1