汽车的碰撞回避装置的制作方法
1.本发明涉及汽车的碰撞回避装置,例如具有制动机构,该制动机构通过响应于来自搭载于车辆的前方环境监测设备的信息而进行动作的促动器来直接驱动现有的制动踏板。
背景技术:
2.以往,因老年人等司机踩错油门踏板和制动踏板而引起的汽车事故增多,这是由于司机对汽车、即车辆的前方识别或前方确认发生了延迟而引起的。为此,近年来,开始在汽车上安装车辆的碰撞回避装置。
3.以往,作为车辆的碰撞回避装置,已知一种能够提前检测出车辆与障碍物之间的碰撞危险,并且能够防止车辆转换方向时的误操作的装置。该车辆碰撞回避装置包括:距离传感器,用于以非接触方式测量出到障碍物的距离;角加速度传感器,用于检测车辆的旋转;基准信号,用于根据车辆的速度来判定碰撞危险距离。所述车辆碰撞回避装置通过对距离传感器和基准信号进行比较,来检测车辆的当前位置是否处在与障碍物存在碰撞危险的位置,并且根据来自角加速度传感器的信号,对吸入的空气量和燃料、以及制动器进行控制,由此防止车辆转换方向时的误操作(例如,参照日本特开平8-72639号公报)。
4.另外,作为物体识别装置,已知一种适当地识别可能会通过其他车辆周围的物体的装置。该物体识别装置包括:其他车辆识别部,基于搭载在本车辆上的激光雷达的检测点信息,来识别行驶在本车辆周边的其他车辆,并且还识别其他车辆的大小;其他车辆追踪部,基于激光雷达的检测点信息,追踪其他车辆;扩大判定部,对追踪中的其他车辆的大小扩大与否进行判定;丢失判定部,当判定为其他车辆的大小已扩大时,基于激光雷达的检测点信息,对其他车辆附近的附近物体的丢失(lost)与否进行判定;以及可通过物体识别部,在通过扩大判定部判定为其他车辆的大小已扩大的情况下,当丢失判定部未判定丢失了附近物体时,将激光雷达检测到的检测点中的位于扩大前的其他车辆的周围的检测点识别为可通过物体(例如,参照日本特开2018-115990号公告)。
5.另外,已知一种车辆中的碰撞回避装置,在车辆发生碰撞的可能性较高的情况下,执行避免与对向车辆发生碰撞的碰撞回避。该碰撞回避装置包括:对象物检测部,用于检测对象物;属性获取部,利用对象物检测部检测到的检测结果,获取对向车辆的属性;碰撞回避执行部,在利用由属性获取部获取到的属性判定出对向车辆越过中心线的情况下,在碰撞可能性的通知和碰撞回避操作中执行至少任意一方(例如,参照日本特开2018-97648号公报)
6.另外,现有的汽车的碰撞回避装置大多只会发出警告或警报。因此,本技术人开发出了一种汽车的碰撞回避装置并已申请专利(参照日本特开2020-5930号公报),所述汽车的碰撞回避装置利用安装在汽车的制动踏板上的促动器来使车辆减速、强制停止,从而所述汽车无法前进。为了使搭载于在用车辆上的促动器发挥制动力,可以考虑在制动器的油压回路上安装增压装置的方法,但是在将增压装置安装到在用车辆的过程中,由于作业差
异较大,会发生漏油等问题,因此上述方法并非优选的方法。另外,在车辆的制动器的油压回路上追加增压装置是件容易实现的事情,从而也可以容易地对每个车辆进行改造,但是在改造制动器回路时,若万一发生漏油等现象,则存在通常的制动器失灵的危险。因此,作为汽车的碰撞回避装置,期望在完全不改动在用车辆的制动系统的情况下,根据响应于来自环境监测设备的信息的控制装置的判断,使制动器进行动作。
技术实现要素:
7.本发明的目的在于解决上述问题,提供一种汽车的碰撞回避装置,其能够廉价地追加安装到现有的汽车即在用车辆中,而无需购买搭载有碰撞回避装置的新车。碰撞回避装置着眼于,即使误踩油门踏板,当踩刹制动踏板时,制动器的工作会比油门更优先这一点,控制装置接收来自搭载在车辆的前方的环境监测设备的信息,并且根据人工智能(ai)学习的结果进行检测,当判断为处于危险状态即危险度超过了危险度的临界值时,通过驱动促动器来机械地直接驱动制动踏板,由此进行制动,并且根据响应于来自环境监测设备的信息的控制装置的判断,来驱动促动器,从而使制动器进行动作,而完全无需改动装备于在用车辆上的制动系统,作为环境监测设备,基于来自用于识别障碍物即物体的类型的单眼相机、和用于检测与该物体之间的空间位置和距离的毫米波雷达的信息,通过ai技术,来判断车辆的前方的障碍物等环境的危险度,并且控制制动力的强弱,能够根据需要进行紧急停止。
8.本发明的汽车的碰撞回避装置,包括:制动机构,装备于在用车辆的车辆上;促动器,用于使所述制动机构工作;环境监测设备,搭载于所述车辆上,并且用于检测所述车辆的前方的物体;以及控制装置,通过对来自所述环境监测设备的信息进行判断,来控制所述促动器的驱动,所述促动器响应于来自所述控制装置的指令,对所述制动机构所具有的制动踏板机械地直接驱动,
9.其特征在于,在所述汽车的碰撞回避装置中,具备如下系统:所述环境监测设备由集成了用于测量所述车辆与所述物体之间的空间位置及距离的毫米波雷达、和用于识别所述物体的类型的单眼相机的组件构成,所述组件设置于所述车辆中的预先确定的规定的位置,并且所述环境监测设备包括显示装置,所述显示装置通过切换所述制动机构的接通(on)和断开(off)来表示所述车辆的工作状况,所述控制装置根据由所述毫米波雷达判断出的危险度和由所述单眼相机判断出的危险度这两方的信息,判断出最终的危险度,并且产生根据所述车辆与所述物体之间的碰撞危险度而预先确定的所述车辆的速度或者动作力并传递到所述制动机构,并且通过机械地直接驱动所述制动踏板,来控制所述车辆的行驶。
10.另外,所述促动器为了直接驱动所述制动踏板,通过支架安装在所述车辆,并且设置在不会与所述制动踏板的踩刹区域发生干涉的位置。另外,所述促动器包括:马达;减速机,用于使所述马达的输出轴的转速减速;凸轮机构,连接在所述减速机的输出轴,并且具备凸轮,所述凸轮直接抵接于所述制动踏板,并且所述凸轮设置于用于将所述制动踏板朝向踩刹方向驱动的凸轮轴;以及电位计,用于将所述凸轮的位移转换为电压。所述促动器根据从所述控制装置发来的所述危险度,来控制所述马达的驱动电压或驱动电流,由此朝向所述制动踏板的踩刹方向机械地直接驱动所述凸轮,随着所述危险度降低,使所述马达的
驱动电压或驱动电流降低,或者使所述马达进行反向旋转。
11.在该汽车的碰撞回避装置中,所述凸轮机构由设置于所述凸轮轴的所述凸轮构成,或者由设置于所述凸轮轴的曲柄和在所述曲柄的前端的工作轴设置的轴承形成的所述凸轮构成。另外,所述促动器的所述减速机由减速齿轮为三级以上的正齿轮或斜齿轮构成,或者由单级涡轮蜗杆构成,所述减速机的减速比构成为70至150。
12.另外,作为所述环境监测设备设置有立体相机或者激光雷达。另外,所述毫米波雷达设置在车外,所述单眼相机设置在车内。
13.另外,所述控制装置获取所述车辆所具备的发动机启动信息、速度信息、制动踏板信息、手刹信息以及倒车灯信息,所述控制装置根据所述车辆的行驶来启动所述系统,并且响应于来自所述单眼相机和所述毫米波雷达的所述信息,使所述控制装置的ai计算出碰撞的所述危险度,并且响应于所述危险度超过预先确定的临界值的情况,所述控制装置通过驱动所述促动器来直接驱动所述制动踏板,使所述车辆停止。
14.本发明的汽车的碰撞回避装置,包括:制动机构,装备于在用车辆的车辆上;促动器,用于使所述制动机构工作;环境监测设备,搭载于所述车辆上,并用于检测所述车辆的前方的物体;以及控制装置,通过对来自所述环境监测设备的信息进行判断,来控制所述促动器的驱动,所述促动器响应于来自所述控制装置的指令,对所述制动机构中具有的制动踏板机械地直接驱动,
15.其特征在于,在所述汽车的碰撞回避装置中,具备如下系统:所述环境监测设备至少由用于识别所述物体的类型的单眼相机构成,所述单眼相机设置于所述车辆中的预先确定的规定的位置,并且所述环境监测设备包括显示装置,所述显示装置通过切换所述制动机构的接通(on)和断开(off)来表示所述车辆的工作状况,所述促动器的减速机由减速齿轮为三级以上的正齿轮或斜齿轮、或者由单级涡轮蜗杆构成,所述减速机的减速比构成为70至150,所述控制装置根据所述单眼相机的信息判断危险度,并且产生根据所述车辆与所述物体之间的碰撞危险度而预先确定的所述车辆的速度或者动作力并传递到所述制动机构,并且通过机械地直接驱动所述制动踏板,来控制所述车辆的行驶。
16.另外,所述促动器利用油压或气压进行工作,根据所述控制装置的指示,下压所述制动踏板来机械地直接驱动,由此控制所述车辆的行驶。
17.如上所述,在本发明的汽车的碰撞回避装置中,在制动踏板的附近设置独立于现有的制动器并直接驱动制动踏板的促动器,并且响应于来自搭载于车辆上的环境监测设备的信息,根据控制装置的判断来使所述促动器动作并使制动踏板动作,由此能够对车辆进行制动,而完全无需改动在用车辆的制动系统,从而可以避免因老年人等对车辆的前方的识别迟滞,或因踩错油门踏板和制动踏板而引起的车辆与前方的物体的碰撞,尤其是可以避免造成人身事故的车辆碰撞。促动器可以通过减速机对马达的旋转提高扭矩,由此可以可靠并快速地驱动凸轮机构的凸轮,并且通过促动器的凸轮驱动能够立即进行制动,从而可以避免车辆与物体之间的碰撞。环境监测设备通过将毫米波雷达和单眼相机容纳在一个壳体中并将这些设置在车辆上,从而可以容易地安装于在用车辆上。另外,毫米波雷达可以发射电波并根据由物体即障碍物反弹回来的电波正确地测量出障碍物的空间位置和距离,但是无法识别该障碍物是车还是人。因此,单眼相机通过深度学习来识别障碍物,例如车辆、人、自行车、公交车、特殊车辆等,并确保用于判断与障碍物之间的距离和方向的信息。
控制装置响应于环境监测设备的毫米波雷达和单眼相机的信息,通过驱动促动器来使制动踏板工作,由此对车辆进行制动并使车辆停止。
附图说明
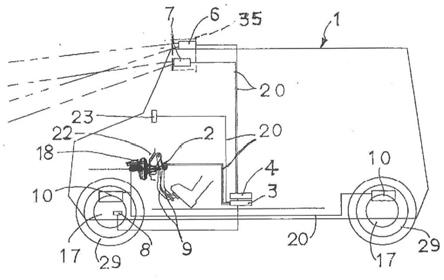
18.图1是表示搭载有本发明的碰撞回避装置的汽车的实施例的示意性说明图。
19.图2是表示图1的汽车中所搭载的制动机构的说明图,其中,促动器安装于制动踏板,并且该促动器处于未驱动的状态。
20.图3是表示图1的汽车中所搭载的制动机构的说明图,其中,促动器安装于制动踏板,并且该促动器处于已驱动制动踏板的状态。
21.图4是表示促动器中的减速机的示意性侧视图。
22.图5是表示促动器中的减速机的示意性剖视图。
23.图6示出了促动器中的减速机由二级减速构成的第一例,图6的(a)是表示由二级正齿轮构成的减速机的示意图,而图6的(b)是表示图6的(a)的齿轮的侧面的示意图。
24.图7示出了减速机由三级减速构成的第二例,图7的(a)是表示由三级正齿轮构成的减速机的示意图,而图7的(b)是表示图7的(a)的齿轮的侧面的示意图。
25.图8示出了减速机由四级减速构成的第三例,图8的(a)是表示由四级正齿轮构成的减速机的示意图,而图8的(b)是表示图8的(a)的齿轮的侧面的示意图。
26.图9示出了减速机由涡轮蜗杆减速构成的第四例,图9的(a)是表示由涡轮蜗杆构成的减速机的示意图,而图9的(b)是表示图9的(a)的蜗杆和涡轮的侧面的示意图。
27.图10是表示用于使该汽车的碰撞回避装置进行工作的处理流程的示意性处理流程图。
具体实施方式
28.本发明的汽车的碰撞回避装置是一种将独立于现有的制动机构而动作的促动器安装于在用车辆的制动踏板附近的系统,例如,优选地,应用于在用车辆的制动系统中。
29.以下,参照附图,对本发明的汽车的碰撞回避装置的实施例进行说明。本发明的汽车的碰撞回避装置,其特征在于,尤其是,完全不对在用车辆的制动系统进行改动,而是在在用车辆的制动踏板9的附近设置了独立于现有的制动器10并机械地直接驱动制动踏板9的促动器2。促动器2是用于对装备于在用车辆的车辆(汽车)1中并构成制动系统的现有的制动机构22进行机械地直接驱动的装置。在车辆1中,该汽车的碰撞回避装置搭载有用于检测其前方的障碍物、人等物体的毫米波雷达6、单眼相机7、车速传感器8、激光雷达(lidar)(未图示)以及立体相机(未图示)等环境监测设备35。在该汽车的碰撞回避装置中,促动器2响应于具备ai(人工智能,artificial intelligence)4的控制装置3的判断,机械地直接驱动制动踏板9。ai4将来自环境监测设备35的信息作为信号接收,并对这些信号进行逻辑推理并学习,然后从学习结果生成推理规则,即,从各种学习结果生成映射,并基于该映射,控制装置3向促动器2发出驱动指示。具体而言,促动器2根据控制装置3的指令,对制动机构22中具备的制动踏板9进行机械地直接驱动,并且根据情况,利用油压或气压来机械地直接驱动。
30.在该汽车的碰撞回避装置中,促动器2设置在不与人踩刹制动踏板9的区域发生干
涉的位置,例如,如图所示,在制动踏板9的上部存在间隙19。促动器2大体包括:马达11;减速机12,其用于使马达11的输出轴37的转速减速;凸轮机构5,具备连接于减速机12的输出轴28的凸轮13,所述凸轮13直接抵接于制动踏板9并构成为将制动踏板9朝向踩刹方向驱动的工作轴21;以及电位计,其用于将凸轮13的位移转换为电压。电位计例如通过将与凸轮13的旋转同步的电刷安装在电阻器并向电阻器的两端施加规定的电压,来读取电阻器的一端与电刷之间的电阻变化,并且通过将电阻变化转换为电压,来检测凸轮13的位置,例如检测凸轮13的旋转角度或移动量。另外,促动器2响应于来自控制装置3的指令而驱动马达11,朝向踩刹制动踏板9的方向机械地直接驱动凸轮13。因此,该控制装置3是一种通过使用环境监测设备35检测车辆1的前方的状况并接收电位计的测量结果,来控制促动器2的工作状态的装置。
31.另外,如图1所示,在该汽车的碰撞回避装置中,搭载于车辆1的环境监测设备35具备:单眼相机7,用于确认前方的环境;车速传感器8,用于检测车辆1的速度;毫米波雷达6,用于发射电波并根据被障碍物等物体反弹回来的电波正确地测量出障碍物的空间位置和距离;监视器23,其作为显示装置,用于在本装置的功能启动时显示on(开启),而在功能未启动时显示off(关闭);以及根据情况还具备激光雷达,其使用光来检测前方的物体,并测量出到对象物的距离。该汽车的碰撞回避装置至少使用毫米波雷达6和单眼相机7来作为环境监测设备35进行双重监测车辆1的前方。另外,在将激光雷达(未图示)作为环境监测设备35组装入组件(kit)的情况下,通过从激光雷达照射光脉冲并感应其反射,虽然能够知道对象物的形状,但是无法判定所述对象物是什么。由于能够安装在与毫米波雷达6相同的地方的激光雷达即便在夜间也有效,因此优选地,设置激光雷达来作为环境监测设备35。另一方面,由于单眼相机7可以像人眼一样看到对象物,因此能够容易地判断出该对象物是什么,但是在夜间灵敏度会降低。在设置有激光雷达的情况下,该汽车的碰撞回避装置可以通过控制装置3来获取单眼相机7的信息和激光雷达的信息,并且能够进行正确的信息处理,因此上述情况是优选的。或者,在该汽车的碰撞回避装置中,作为环境监测设备35可以仅由单眼相机7构成,与由单眼相机7和毫米波雷达6一体构成时的情况相比,虽然信息的准确性较差,但是可以低价地构成装置其本身。
32.另外,控制装置3接收来自单眼相机7、车速传感器8、毫米波雷达6和激光雷达的各种信息的检测信号,并通过驱动促动器2来驱动制动踏板9。在该汽车的碰撞回避装置中,来自毫米波雷达6和单眼相机7的检测信号通过连接线20发送到ai4,被进行判断处理。来自车速传感器8的检测信号通过连接线20发送到控制装置3。控制装置3通过连接线20驱动并控制促动器2。控制装置3构成为,尤其,根据由毫米波雷达6判断出的危险度和由单眼相机7的判断出的危险度这两方的信息,判断最终的危险度。在该汽车的碰撞回避装置中,车速传感器8安装于车辆1的车轮29,在车轮29设置有制动盘17和制动器10。监视器23搭载于车辆1,例如,可以用绿灯表示on,用红灯表示0ff。
33.在图2和图3中示出了设置于车辆1的制动系统的制动机构。制动踏板9以枢接在支点轴30的方式安装于真空助力器(master back)18,其中,该真空助力器18是利用发动机的吸气负压来使制动踏板9的踩刹力倍增的装置。图2示出了在该汽车的碰撞回避装置中制动器10没有进行制动时的制动踏板9,图3示出了在该汽车的碰撞回避装置中制动器10进行制动时的制动踏板9,并且图3示出了制动踏板9在促动器2的作用下移动到全行程位置15时的
状态。尤其是,该碰撞回避装置利用促动器2来可靠且适当地按压制动踏板9,促动器2由小型马达11和减速齿轮即减速机12构成。优选地,减速机12的减速比为80~150的范围。为了使促动器2构成得紧凑,优选地,减速机12例如由三级以上的正齿轮32、三级以上的斜齿轮(未图示)、或单级的涡轮蜗杆33构成。减速机12的齿轮比与制动踏板9的按压力及其速度有重要的关系,若减速比大,则速度变慢,从而制动器10不能及时制动,若减速比小,则需要大扭矩的马达,从而马达尺寸变大,使得无法搭载在脚边。若减速机12的齿轮比为三级以下,则齿轮比在每一级的减速比变大,从而无法减小尺寸。
34.接着,参照图6至图9,对促动器2中的减速机12的各种示例进行说明。
35.图6示出了减速机12a由二级减速构成的第一例。图6的(a)是正齿轮32构成为二级的示意图,而图6的(b)是表示图6的(a)的侧面的示意图。马达11的驱动力通过二级的正齿轮32传递到作为工作轴21的凸轮13。
36.图7示出了减速机12b由三级减速构成的第二例。图7的(a)是正齿轮32构成为三级的示意图,而图7的(b)是表示图7的(a)的侧面的示意图。马达11的驱动力通过三级的正齿轮32传递到作为工作轴21的凸轮13。
37.图8的(a)和图8的(b)示出了减速机12c由四级减速构成的第三例。图8的(a)是正齿轮构成为四级的示意图,而图8的(b)是表示图8的(a)的侧面的示意图。马达11的驱动力通过四级的正齿轮32传递到作为工作轴21的凸轮13。减速机12c可以适当地安装在现有的所有车型,是优选的类型。
38.图9示出了减速机12d由容纳于壳体39的涡轮蜗杆33的减速构成的第四例。图9的(a)是涡轮蜗杆33由蜗杆34(螺旋齿轮)和涡轮36(斜齿轮)构成的示意图,而图9的(b)是表示图9的(a)的侧面的示意图。马达11的驱动力输入到涡轮蜗杆33的蜗杆34,蜗杆34的旋转通过涡轮36传递到作为工作轴21的凸轮13。减速机12d可以适当地安装在现有的车型,是优选的类型。
39.如图4和图5所示,设置于该汽车的碰撞回避装置的减速机12例如构成为三级减速式的齿轮机构,但是也可以进一步增加减速级数而构成为五级。图5中,在外壳24的内部容纳有马达11和减速机12。在减速机12中,在马达11的工作轴21连接有减速机12的第一级的齿轮系25,使得马达11的旋转减速,接着,正齿轮32的齿轮系25连接于第二级的齿轮系26,使得齿轮系25的输出侧的旋转进一步减速,并且正齿轮32的齿轮系26连接于第三级的齿轮系27,使得齿轮系26的输出侧的旋转进一步减速。接着,正齿轮32的齿轮系27的输出侧的输出轴28构成为凸轮机构5的凸轮轴14。另外,如图4和图5所示,凸轮机构5由凸轮13构成,所述凸轮13由设置于凸轮轴14的曲柄31和在设于曲柄31的前端的工作轴21设置的轴承16构成,或者凸轮机构5由设置于凸轮轴14的以普通的卵形形成偏心的凸轮(未图示)构成。图示的构成凸轮机构5的凸轮13是一种从凸轮轴14延伸的曲柄31,并且在曲柄31的前端安装有轴承16。凸轮机构5中,通过设置发挥作为凸轮13的功能的轴承16,凸轮13能够容易地碰触制动踏板9,从而可以响应于促动器2的驱动立刻按压制动踏板9,使制动器10进行制动。
40.在该汽车的碰撞回避装置中,促动器2通过减速机12使马达11的旋转减速70~150倍左右并传递到凸轮轴14,同时能够提高凸轮轴14的旋转扭矩。在该汽车的碰撞回避装置中,控制装置3基于ai4的学习结果进行判断,并且从控制装置3向促动器2的马达11发出指令并在短时间内使马达11旋转,由此将凸轮机构5的凸轮13驱动到预先确定的规定的旋转
角度。在该汽车的碰撞回避装置中,促动器2设置在靠近真空助力器轴的地方,并且设定为促动器2的工作距离、即位移量小。另外,现有车辆的制动力在图2的制动踏板9的位置为0,虽然根据车型而不同,但作为一个例子,图3的制动踏板9在被最大踩刹时、即在制动全行程位置15时的踩刹力为200n左右。另外,制动踏板9在人踩刹的位置上的最大踩刹行程为50mm左右。制动踏板9的杠杆比(在制动踏板位置上的按压量与真空助力器18的移动量之比)为2.6左右,因此在真空助力器18的轴部上的按压负荷为520n,而最大位移为19mm左右。由于该汽车的碰撞回避装置的促动器2按压真空助力器18的轴部的附近,因此促动器2的最大按压负荷为520n,而偏心凸轮13的动作距离为19mm左右。另外,在该汽车的碰撞回避装置中,当使用凸轮机构5进行驱动时,初始负荷几乎为0,而最大限度按压制动踏板时、即位移量为19mm时的转矩,由于偏心量变小,因此驱动扭矩可以较小。
41.该汽车的碰撞回避装置设定为,根据由ai4判定的驾驶危险度,来判断凸轮机构5的凸轮轴14、即曲柄轴的转速和旋转角度并进行驱动。就ai4的判定而言,当车辆1的行驶存在危险时,如果判断为车辆1通过减速能够避开危险,则相应地设定凸轮轴14的转速和凸轮13的旋转角度。设定为即使在车辆1的前方突然跳出来人时也根据其危险程度来调节制动强度。当人极端危险地跳出来时,通过来自促动器2的电位计的检测信号,以最高速度且不间断地驱动到制动踏板9的制动全行程位置15。控制装置3被编程为,只要能够确保车辆1的驾驶安全,就不进行过度的制动。其理由是为了照顾车辆1中的乘客的安全,避免在车辆1的紧急制动中,驾驶员、即司机撞到方向盘,或者副驾驶座的乘客撞到挡风玻璃。但是,当判断为会对车外的人造成危害时,促动器2毫不留情地以最高速度进行紧急制动,并且驱动到制动全行程位置15。这是因为比起车内的人受到的冲击,车外的人的生命的优先度压倒性地高。
42.另外,在该汽车的碰撞回避装置中,在车辆1换挡失误的情况下,或者在车辆1面向便利店停车并意图倒车时因司机踩到油门踏板会使车辆1向前前进并驶入便利店店内的情况下,由于本发明中所设置的激光雷达和单眼相机7等环境监测设备对车辆1的前方进行监测,因此本碰撞回避装置能够进行动作而使车辆1紧急停止。在司机意图停车时搞错油门踏板和制动踏板9而踩下了油门踏板的情况下,也会对车辆1的前方进行监测,如果判断为车辆1存在与物体碰撞的危险,则本碰撞回避装置进行动作,使车辆1避免与障碍物碰撞。现有的碰撞回避装置设定为,在踩刹了制动踏板9的时候,无论怎样踩油门踏板,制动器10的动作优先于油门。上述设定之所以成立是因为,油门踏板不直接对发动机进行控制,而是通过将踩踏油门的次数转换为信号来对发动机进行控制。也就是说,相对于油门信号,踩刹制动踏板9的制动信号更优先。
43.关于本发明的汽车的碰撞回避装置,将参照图10的处理流程图,对汽车的碰撞回避装置的动作进行说明。
44.在该碰撞回避装置的系统中,促动器2包括:马达11;减速机12,其用于使马达11的输出轴37的转速减速;凸轮机构5,其具备设置于凸轮轴14的凸轮13,该凸轮13连接于减速机12的输出轴28并直接抵接于制动踏板9,用于将制动踏板9朝向踩刹方向驱动;以及电位计(未图示),其用于将凸轮13的位移转换为电压。促动器2根据从控制装置3发来的危险度来控制马达11的驱动电压或驱动电流,由此朝向制动踏板9的踩刹方向机械地直接驱动凸轮13,随着危险度降低,使马达11的驱动电压或驱动电流降低或进行反向旋转。另外,控制
装置3获取车辆1所包含的发动机的启动信息、速度信息、制动踏板信息、手刹信息以及倒车灯信息。控制装置3根据车辆1的行驶来启动本系统,并且响应于来自单眼相机7和毫米波雷达6的信息,使控制装置3的ai4计算出碰撞危险度,并且响应于危险度超过预先确定的临界值的情况,控制装置3通过驱动促动器2来直接驱动制动踏板9,使车辆1停止。
45.启动搭载有碰撞回避装置的汽车的发动机,由此碰撞回避装置动作(启动)。碰撞回避装置的系统的控制装置3的ai4获取发动机启动信息、来自速度传感器8的速度信息、制动机构22的制动踏板9的信息、手刹的信息、倒车灯的信息等(步骤s1)。在发动机启动的同时,构成环境监测设备35的单眼相机7的开关和毫米波雷达6的开关接通,分别对车辆1的前方进行监测(步骤s1)。在毫米波雷达6检测物体的同时,单眼相机7通过深度学习(deep learning),对检测到的物体的类型进行识别判断(步骤s2)。来自环境监测设备35的信息由控制装置3中内置的ai4进行解析,并且判断出汽车与物体之间的碰撞危险度处于什么等级(步骤s3)。当控制装置3的ai判断为汽车即车辆1与物体之间没有碰撞危险度(no)时(步骤s3),处理为单眼相机7和毫米波雷达6等环境监测设备35继续进行监测并收集信息。当判断为车辆1与物体之间的碰撞危险度高、即超过临界值(yes)时,控制装置3发出使促动器2动作的指令,由此驱动促动器2(步骤s4)。控制装置3发出使制动机构22动作的指令,由此直接驱动制动踏板9(步骤s5),从而对车辆1进行制动,使车辆1停止,以避免车辆1与物体之间的碰撞(步骤s6)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1