一种基于混合动力系统的可远程控制的智能小车及方法
1.本发明涉及自动控制领域、信息通信领域,特别是涉及一种基于混合动力系统的可远程控制的智能小车及方法。
背景技术:
2.随着人类的活动,能源问题与环保问题在近些年获得了广泛的讨论以及关注,可持续发展成为了全世界都在密切关注的议题,而绿色能源的运用则符合了人类可持续发展的要求,因此获得了广泛的研究。其中,锂离子电池以其特有的性能优势已在日常生活中的各类设备中获得了广泛的应用。但是锂电池的容量与成本之间的矛盾也为其进一步应用带来了障碍。而氢气,其具有可压缩、常温条件下即可通过催化将化学能转化为电能的特点,越来越受到各种能源相关领域的青睐。但是氢燃料电池技术还未完全成熟,只通过氢燃料电池直接驱动例如车辆运动效率较低且会导致氢燃料电池寿命严重下降。因此实现氢电池与锂电池的配合是必要的。
3.而在人类社会中,有很多工作是人类没法直接完成或存在很大风险的,比如核泄漏时反应堆内部情况探查、致病菌如炭疽等污染区探测、管道内部情况检测、火灾现场内部探查等,这种情况下无人侦察设备可以起到很大的作用。但是纯锂电池驱动的小车如果想要较长时间的续航的话,锂电池容量需要更大,大小也会随之变大,同时成本也会相应增长。这时氢燃料电池与锂电池混合动力可以在不增加车辆大小与显著增加成本的前提下显著提升车辆的续航能力,以达到更好的探测目的。而无人侦察设备也需要无线通信技术的支持,4g技术即可实现在远距离对探测小车的控制,使得操作人员不必再置身于危险的环境中。
技术实现要素:
4.发明目的:本发明的目的是提供一款可以实现远程监视与控制的基于锂离子电池与氢燃料电池混合供能的节能小车,能够实现远程控制小车移动与摄像头监视,以及控制锂离子电池与氢燃料电池的供能分配。
5.技术方案:为达到此目的,本发明采用以下技术方案:一种基于混合动力系统的可远程控制小车,包括:车体,其上设有用于驱动小车行走和调整方向的动力驱动模块;车载控制模块,与所述动力驱动模块电连接;遥控模块,通过无线通信模块与所述车载控制模块信号连接;图像采集模块,设置在车体上,用于采集小车周围环境信息,图像采集模块与所述车载控制模块电连接;电源模块,用于向所述动力驱动模块供电,所述电源模块包括:燃料电池,燃料电池电堆的输出端连接dc/dc转换器的输入端,dc/dc转换器的第一输出端经第一继电器与动力电池的的充电接口连接,动力电池的供电接口经第二继电器
与动力驱动模块连接;dc/dc转换器的第二输出端经第三继电器与动力驱动模块连接;所述第一继电器、第二继电器、第三继电器分别与所述车载控制模块信号连接。
6.系统电源输出包括燃料电池电堆和/或动力电池的电源输出。
7.所述燃料电池为氢燃料电池。
8.还包括电压读取判断电量的亮灯显示模块,用于判断所述动力电池的电量,所述电压读取判断电量的亮灯显示模块通过分压电路将动力电池电压分配到所述车载控制模块的模数转换器刻度范围内,随后经过一个电压跟随器接入车载控制模块的模数转换器中读取电压,通过指示灯的个数显示动力电池的电压余量,实现对于动力电池电量的监控。
9.所述动力电池为锂电池。
10.所述遥控模块包含一块第一单片机、与第一单片机连接的显示屏以及方向控制按键。
11.所述车载控制模块为一块第二单片机。
12.所述动力驱动模块包括控制车体前、后轮行走的电机和控制前轮转向的舵机。
13.本发明进一步公开了一种基于所述基于混合动力系统的可远程控制小车的无线通信方法,所述无线通信模块包括一个蓝牙模块和一个4g lte模块,无线通信分以下两种模式:第一.近距离时以及未检测到4g信号时自动切换为通过蓝牙通信模块进行通信;第二.远距离时自动切换为4g lte模块进行基于4g的数据传输。
14.本发明进一步公开了一种基于所述基于混合动力系统的可远程控制小车的电源切换方法,燃料电池电堆和动力电池同时供电时,负载先从燃料电池电堆和动力电池中电压较高的电源取电,当负载所需要的功率小于电压较高的电源所能提供的最大功率时,则全部由该电源供电;当负载所需要的功率大于燃料电池电堆和动力电池中电压较高的电源所能提供的最大功率时,则另一个电源补充剩余的功率缺额,设置经过dc/dc变换器后的燃料电池输出电压略低于动力电池输出电压,即燃料电池供电优先级高于动力电池,此时,燃料电池为主要的负载供电来源,动力电池起辅助作用,以弥补负载所需功率的突然变化;系统控制模块,通过控制不同通路继电器的通断,实现两种动力系统的切换,具体是:串联运行时,将连接燃料电池为动力电池充电通路的第一继电器、动力电池与动力模块之间的第二继电器打开,闭合燃料电池给负载供电通路的第三继电器;并联运行时,将连接燃料电池为锂电池充电通路的第一继电器闭合,打开燃料电池给负载供电通路的第三继电器和动力电池给负载供电通路的第二继电器,从而实现能量流的切换。
15.有益效果:第一.本发明公开了一种基于混合动力系统的可远程控制的智能小车,与现有设计相比,本发明实现了远程对氢燃料电池与锂离子电池供能的分配,可以根据实际情况灵活调节两电池系统的供能,实现效率的最大化;第二.本发明小车通过图像采集模块实现了小车的远程监视与控制,使得小车可以在人类无法到达或对人类生命财产安全存在威胁的环境中运行。
16.第三.本发明小车蓝牙与4g lte通信可以自动切换,提升了信息传输的稳定性与不同电磁环境的适应性。
附图说明
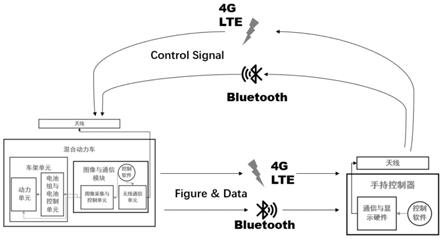
17.图1为本发明具体实施方式中可以实现远程监视与控制的基于锂离子电池与氢燃料电池混合供能的节能小车控制示意图;图2为本发明具体实施方式中串、并联结构的燃料电池与锂电池混合动力系统的总结构图;图3为本发明具体实施方式中模块s1中氢燃料电池运行时电流温度曲线图;图4为本发明具体实施方式中模块s1中氢燃料电池运行时性能曲线图。
具体实施方式
18.下面结合具体实施方式对本发明的技术方案作进一步的介绍。
19.本具体实施方式公开了一种基于混合动力系统的可远程控制的智能小车,包括以下模块:s1:电池组与电池控制模块,包含以铂作为催化剂的氢燃料电池以及对应的气罐;s2:电堆控制模块及一组锂电池与充放电模块,还包括控制电池放电的继电器模块;s3:动力驱动模块,包含有一个由电池组模块供电的电机以及对应的传动机械结构和一个由电池组模块供电并由车载控制模块控制的舵机及对应的方向控制机械结构;s4:车载控制模块,包含一块第二单片机;s4:无线通信模块,包含一个与车载控制模块相连接的蓝牙模块和一个同样与车载控制模块相连接的4g lte模块,其可以通过遥控模块中的程序实现蓝牙模块和4g lte模块两个模块的智能切换,车载控制模块通过所述无线通信模块接收来自遥控模块的控制信息并将图像信息传输给遥控模块;所述遥控模块包含一块stm32单片机开发板,在stm32单片机开发板的基础上搭载一块显示屏以及方向控制按键,并搭载蓝牙与4g lte通信模块;遥控模块中的所述stm32单片机开发板中内嵌有控制软件,所述控制软件包含两块单片机之间的通信控制程序、图像采集程序、继电器控制程序、pwm波发生控制程序以及图像处理程序和控制指令发生与发送程序。
20.s5:车架单元,包含一钢制车架及底盘,在车架前端与后端均包含一组减震模块,其上搭载动力驱动模块,在之上有一钢制隔板,隔板上搭载电池组与控制模块等单元;无线通信可分以下两种模式:第一.近距离时以及未检测到4g信号时自动切换为通过蓝牙通信模块进行通信;第二.远距离时自动切换为4g lte模块进行基于4g的数据传输。
21.本发明具体实施例中,采用的锂离子电池为18650三元锂电池,单体容量2000ma
·
h,采用的氢燃料电池输出电压为25.2v,输出功率300w。
22.本发明具体实施例中,采用的摄像头为ov5640摄像头,采用的单片机控制模块为意法半导体stm32f103开发板。4g lte模块采用高新兴物联gm510 c2e_l,4模13频lte制式通讯模组。蓝牙模块为atk
‑
hc05蓝牙串口模块。
23.本发明具体实施例中,遥控模块中的stm32单片机开发板采用意法半导体stm32f767开发板。触摸显示屏幕为基于gt9147芯片的4.3寸iic电容式触摸屏,分辨率为800*480。4g lte模块采用高新兴物联gm510 c2e_l,4模13频lte制式通讯模组。蓝牙模块为atk
‑
hc05蓝牙串口模块。
24.本发明所述基于混合动力系统的可远程控制小车的电池组运行可分以下两种模式:燃料电池电堆和动力电池同时供电时,负载先从燃料电池电堆和动力电池中电压较高的电源取电,当负载所需要的功率小于电压较高的电源所能提供的最大功率时,则全部由该电源供电;当负载所需要的功率大于燃料电池电堆和动力电池中电压较高的电源所能提供的最大功率时,则另一个电源补充剩余的功率缺额,设置经过dc/dc变换器后的燃料电池输出电压略低于动力电池输出电压,即燃料电池供电优先级高于动力电池,此时,燃料电池为主要的负载供电来源,动力电池起辅助作用,以弥补负载所需功率的突然变化;系统控制模块,通过控制不同通路继电器的通断,实现两种动力系统的切换,具体是:串联运行时,将连接燃料电池为动力电池充电通路的第一继电器和动力电池与动力模块之间的第二继电器打开,闭合燃料电池给负载供电通路的第三继电器;并联运行时,将连接燃料电池为锂电池充电通路的第一继电器闭合,打开燃料电池给负载供电通路的第三继电器和动力电池给负载供电通路的第二继电器,从而实现能量流的切换。
25.所述燃料电池的电堆控制模块通过温度压力法读取氢气余量,通过控制风扇转速控制温度及氧气的涉入,所述温度压力法是通过检测发生变化前后的储氢瓶内氢气相对温度和相对压力,通过相应的变化量来检测氢气量的变化 :式中,m 为氢气的摩尔质量 2.016 g/mol,v 为存储氢气的体积,r 为温度常数 8.314 j/mol
·
k,p1 和 p2 分别为两时间节点的压力,t1 和t2 为两时间节点的温度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1