一种高兼容的五自由度新能源汽车充电服务机器人
1.本发明涉及一种高兼容的五自由度新能源汽车充电服务机器人。
背景技术:
2.现有的自动化充电桩通过机械臂自动将充电插头与电动汽车的充电接口进行插接,但是目前的充电桩自动化过程多采用充电插头部分主动采集充电接口的位置信息,采用视觉识别、主动激光定位等方式,但由于不同型号的电动汽车充电插口的位置和结构有所不同,且多位于车体侧面,因此在采集位置时都需要采集大量信息,如视觉识别需要对图像作复杂的识别计算,而激光定位往往需要多个激光发射和接收装置同时采集多组定位信息并通过复杂计算,因此上述现有技术存在计算过程复杂,出错几率高。此外现有充电设施在自动连接的过程中只能每次都通过识别装置定位,利用复杂计算尽量保证插接的准确性,如果采用较简单的计算方式,现有技术常常出现多次使用中误差累积的现象,如此导致累积后的误差大到无法被忽略,从而影响连接可行性的结果。
技术实现要素:
3.本发明的目的在于提供一种高兼容的五自由度新能源汽车充电服务机器人,以解决现有技术中无法兼顾定位过程的计算简单化和避免多次使用后误差累积影响连接可行性的技术问题。
4.所述的一种高兼容的五自由度新能源汽车充电服务机器人,包括机器人平台和设于汽车充电接口处的智能充电终端,所述机器人平台包括三轴机械臂和对接机构,所述对接机构安装在所述三轴机械臂的机械臂末端并包括有用于连接所述智能充电终端充电的对接组件,所述对接组件包括误差消除机构和充电插头,所述误差消除机构包括对接安装结构、柔性关节、定位末端和定位针,所述定位针固定在所述定位末端,所述定位末端通过柔性关节安装到所述对接机构的末端,所述智能充电终端设有与汽车上充电口电性连接的标准插口和定位槽面,所述定位槽面包括引导所述定位针移动的锥状凹槽和设于所述锥状凹槽中心与所述定位针插接配合的定位孔,所述充电插头通过对接安装结构与所述定位末端连接并随其移动。
5.优选的,所述柔性关节包括关节外壳、径向弹性连接套和轴向弹性元件,所述关节外壳设有前部为开口的关节腔,所述定位末端插接在所述关节腔中,所述定位末端外侧与所述关节腔侧壁之间通过所述径向弹性连接套连接,所述定位末端与所述关节腔的底部之间通过所述轴向弹性元件连接。
6.优选的,所述对接安装结构包括与所述定位末端固定并向外径向伸出的连接板,所述连接板设有与所述充电插头滑动套接的连接孔,所述关节外壳外侧固定有顶出板,所述顶出板的前面与所述充电插头相对并固定有限位壳,所述限位壳的前面开口小于所述充电插头后端径向凸出形成的限位盘,所述限位盘设于所述限位壳内并小于所述限位壳的内腔使所述限位盘能在所述限位壳中随所述定位末端移动,所述限位壳的内腔抵接所述限位
盘时,所述充电插头朝向与所述定位针相同。
7.优选的,所述关节腔的侧壁还设有绕周向布置的径向误差感应器,所述径向误差感应器用于检测所述定位针插入定位孔后,所述定位末端相对所述关节腔移动的距离和方向并发送到相应的控制模块,控制模块计算出对应的累计误差从而将其消除。
8.优选的,所述智能充电终端靠外侧的端面上还设有超声波距离感应器,所述智能充电终端内设有单片机和无线收发模块,所述超声波距离感应器用于向地面方向发射和接收超声波测定所述智能充电终端的高度数据,所述单片机连接所述超声波距离感应器、所述激光发射模块和所述无线收发模块,所述单片机将高度数据经所述无线收发模块发送到所述机器人平台。
9.优选的,所述智能充电终端设有与所述单片机相连的激光发射模块,所述机器人平台设有无线收发模块、激光接收模块和控制模块,所述激光发射模块用于发射垂直于所述标准插口的端面的定向激光,所述激光接收模块设于所述定位末端用于接收所述定向激光,所述控制模块连接所述激光接收模块用于通过接收到激光时所述定位末端的位置计算所述定位激光的发射方向以控制所述转动结构偏转,所述控制模块还用于控制所述三轴机械臂在测定所述定向激光的方向后沿该方向朝智能充电终端移动所述定位末端。
10.优选的,所述定位末端上还设有连接所述控制模块的激光测距模块,所述激光测距模块用于在所述转动结构将所述定位末端转至正对所述智能充电终端后检测所述定位末端到所述智能充电终端的距离。
11.本发明的技术效果:本方案只需要将智能充电终端与汽车的充电接口连接,即能与机器人平台配合将充电插头连接到标准插口实现对汽车充电的效果。本方案中机器人的空间架构简单清晰,利用定向激光分步测量能准确测定标准插口的位置和朝向,因此本方案能以较简单的定位过程准确实现标准插口和充电插头的对准插接。该方案考虑到多次使用后机器人平台对机械臂的控制会导致误差累积,因此通过误差消除机构和定位槽面配合,既保证发生误差累积后仍能保证充电插头插接成功,也能测定实际产生的累积误差的大小和方向,从而让控制模块能以此对机械臂进行校正。
附图说明
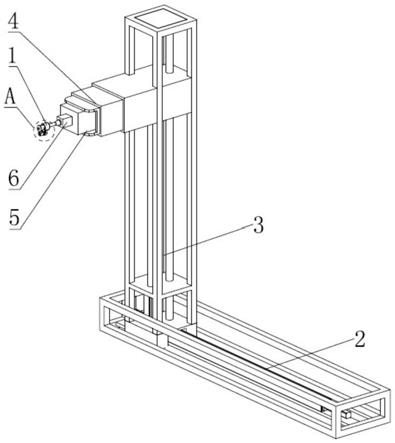
12.图1为本发明中机器人平台的结构示意图。
13.图2为图1所示结构中区域a的结构放大图。
14.图3为本发明中智能充电终端的结构示意图。
15.图4为本发明在充电插头插接过程中连接部分局部结构示意图。
16.图5为图2所示结构中定位末端与柔性关节连接结构的结构示意图。
17.图6为本发明中功能模块的原理框图。
18.其中附图标记为:1、误差消除机构,11、定位针,12、定位末端,13、关节外壳,131、径向弹性连接套,132、轴向弹性元件,14、顶出板,15、限位壳,16、连接板,17、充电插头,18、限位盘,2、x轴移动平台,3、y轴移动平台,4、z轴移动平台,5、转向结构,6、对接移动机构,7、智能充电终端,71、标准插口,72、充电盖,73、锥状凹槽,74、超声波模块,75、激光发射模块,76、压力传感器,77、定位孔。
具体实施方式
19.下面对照附图,通过对实施例的描述,对本发明具体实施方式作进一步详细的说明,以帮助本领域的技术人员对本发明的发明构思、技术方案有更完整、准确和深入的理解。
20.如图1
‑
6所示,本发明提供了一种高兼容的五自由度新能源汽车充电服务机器人,包括机器人平台和设于汽车充电接口处的智能充电终端7,所述机器人平台包括三轴机械臂和对接机构,所述对接机构安装在所述三轴机械臂的机械臂末端并包括有用于连接所述智能充电终端7充电的对接组件,所述对接组件包括误差消除机构1和充电插头17,所述误差消除机构1包括对接安装结构、柔性关节、定位末端12和定位针11,所述定位针11固定在所述定位末端12上,所述定位末端12通过柔性关节安装到所述对接机构的末端,所述智能充电终端7设有与汽车上充电口电性连接的标准插口71和定位槽面,所述定位槽面包括引导所述定位针11移动的锥状凹槽73和设于所述锥状凹槽73中心与所述定位针11插接配合的定位孔77,所述充电插头17通过对接安装结构与所述定位末端12连接并随其移动。
21.所述柔性关节包括关节外壳13、径向弹性连接套131和轴向弹性元件132,所述关节外壳13设有前部为开口的关节腔,所述定位末端12插接在所述关节腔中,所述定位末端12外侧与所述关节腔侧壁之间通过所述径向弹性连接套131连接,所述定位末端12与所述关节腔的底部之间通过所述轴向弹性元件132连接。所述充电插头17在所述误差消除机构1定位后的插接过程中移动的距离不大于所述轴向弹性元件132的伸缩行程。
22.所述对接安装结构包括与所述定位末端12固定并向外径向伸出的连接板16,所述连接板16设有与所述充电插头17滑动套接的连接孔,所述关节外壳13外侧固定有顶出板14,所述顶出板14的前面与所述充电插头17相对并固定有限位壳15,所述限位壳15的前面开口小于所述充电插头17后端径向凸出形成的限位盘18,所述限位盘18设于所述限位壳15内并小于所述限位壳15的内腔使所述限位盘18能在所述限位壳15中随所述定位末端12移动,所述限位壳15的内腔抵接所述限位盘18时,所述充电插头17朝向与所述定位针11相同。
23.所述关节腔的侧壁还设有绕周向布置的径向误差感应器,所述径向误差感应器用于检测所述定位针11插入定位孔77后,所述定位末端12相对所述关节腔移动的距离和方向并发送到相应的控制模块,控制模块计算出对应的累计误差从而将其消除。
24.所述智能充电终端7靠外侧的端面上还设有检测距离的超声波模块74,所述智能充电终端7内设有单片机和无线收发模块,所述超声波模块74用于向地面方向发射和接收超声波测定所述智能充电终端7的高度数据,所述单片机连接所述超声波模块74、所述激光发射模块75和所述无线收发模块,所述单片机将高度数据经所述无线收发模块发送到所述机器人平台。
25.所述三轴机械臂包括x轴移动平台、y轴移动平台和z轴移动平台,所述x轴移动平台水平设置于底部,所述y轴移动平台直立安装在所述x轴移动平台的x轴移动端上,所述z轴移动平台水平安装在所述y轴移动平台的y轴移动端上。
26.x轴移动平台包括底座框架、同向安装在所述底座框架中的x轴滚珠丝杠机构和相应的位置感应器,y轴移动平台包括直立框架、同向安装在所述直立框架汇总的y轴滚珠丝杠机构和相应位置感应器。直立框架固定在所述x轴滚珠丝杠机构的滑块上,所述底座框架内还同向设有一对水平导向杆,所述直立框架的底部与所述水平导向杆滑动连接。所述直
立框架中也设有一根直立导向杆,所述y轴滚珠丝杠机构上作为滑动部件的滑动座同时与所述直立框架和所述直立导向杆滑动连接。所述z轴移动平台为单缸多级伸缩臂,包括插接在所述滑动座侧面的二节臂、滑动插接在所述二节臂中的三节臂以及滑动插接在所述三节臂中的四节臂。所述二节臂受液压推杆驱动,所述二节臂、三节臂和四节臂之间通过绳排滑轮传动,三节臂的尾端与伸缩绳一的一端连接,而另一端经固定在二节臂中的定滑轮连接到滑动座的内腔。四节臂尾端固定连接伸缩绳二的一端,所述伸缩绳二的另一端经固定在所述三节臂上的定滑轮连接到二节臂的内腔中。
27.所述对接机构还包括与所述z轴移动平台的z轴移动端转动连接的转向结构5、安装在所述转向结构5上的对接移动机构6和舵机,所述对接移动机构6上的伸缩端为所述对接机构的末端,所述舵机驱动所述转动结构并控制偏转角度。
28.对接移动机构6采用滚珠丝杠结构的电缸或电动伸缩杆,由步进电机驱动,四节臂前端设有开口,且开口两侧设有对称伸出的安装部,转动结构为内部设有所述对接移动结构的转动块,转动块通过转轴安装在所述四节臂的内腔靠前部分,舵机安装在四节臂的内腔中并通过齿轮这类传动结构驱动所述转轴,转轴与转动块固定连接。
29.所述智能充电终端7设有与所述单片机相连的激光发射模块75,所述机器人平台设有无线收发模块、激光接收模块和控制模块,所述激光发射模块75用于发射垂直于所述标准插口71的端面的定向激光,所述激光接收模块设于所述定位末端12用于接收所述定向激光,所述控制模块连接所述激光接收模块用于通过接收到激光时所述定位末端12的位置计算所述定位激光的发射方向以控制所述转动结构偏转,所述控制模块还用于控制所述三轴机械臂在测定所述定向激光的方向后沿该方向朝智能充电终端7移动所述定位末端12。
30.所述智能充电终端7一端为与汽车充电接口配合相连的连接端,而另一端设有电机驱动的充电盖72和压力传感器76,所述压力传感器76与单片机连接,当压力传感器76被触发单片机控制电机驱动充电盖72打开或关闭标准插口71。
31.所述定位末端12上还设有连接所述控制模块的激光测距模块,所述激光测距模块用于在所述转动结构将所述定位末端12转至正对所述智能充电终端7后检测所述定位末端12到所述智能充电终端7的距离。
32.本发明在使用过程中,当智能充电终端7被启动后首先通过超声波模块74测定自身到地面的距离,将此高度信息发送到机器人平台,机器人平台通过y轴移动平台将充电插头17移动到与标准插口71一致的高度,再驱动x轴移动平台进行水平移动。激光发射模块75与超声波模块74同时启动,当充电插头17水平移动时,与其相对固定的激光接收模块随之移动,根据不同伸出距离时接收到定向激光的位置计算出定向激光的发射方向和激光路径,由此确定激光的朝向控制转动机构偏转及控制三轴机械臂沿该方向移动从而将充电插头17插向智能充电终端7。
33.在校准后的状态下,标准插口71与充电插头17经过上述定位过程,在插接过程中产生的误差很小,插头和插口基本能直接实现插接,但多次使用会导致较小的误差累计达到无法被忽视的程度。此时就需要通过误差消除机构1辅助插入并消除误差。此过程中机械臂末端的定位针11接触锥状凹槽73,之后定位末端12继续被压向智能充电终端7,柔性关节令定位末端12能做少量偏移,定位针11也因此被导向定位孔77,充电插头17在移动过程中被连接板16带动一同移动。当定位针11插入定位孔77后,充电插头17和标准插口71彼此正
相对,此时径向误差感应器测定定位末端12在关节腔中的偏移方向和距离就得到之前的累积误差,控制模块可以此对机械臂重新校正消除误差。之后定位末端12被进一步向前推动,顶出板14随关节外壳13向前顶动充电插头17,从而将充电插头17与标准插口71插接通电。
34.采用本方案后,只需要将智能充电终端7与汽车的充电接口连接,即能与机器人平台配合将充电插头17连接到标准插口71实现对汽车充电的效果。本方案中机器人的空间架构简单清晰,利用定向激光分步测量能准确测定标准插口71的位置和朝向,因此本方案能准确实现标准插口71和充电插头17的对准插接。该方案考虑到多次使用后机器人平台对机械臂的控制会导致误差累积,因此通过误差消除机构1和定位槽面配合,既保证发生误差累积后仍能保证充电插头17插接成功,也能测定实际产生的累积误差的大小和方向,从而让控制模块能以此对机械臂进行校正。
35.上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的发明构思和技术方案进行的各种非实质性的改进,或未经改进将本发明构思和技术方案直接应用于其它场合的,均在本发明保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1