降低碰撞风险的装置及方法与流程
1.本公开涉及一种降低碰撞风险的装置及方法,更具体地,涉及一种通过对象的信息设置用于降低碰撞风险的警报的降低碰撞风险的装置及方法。
背景技术:
2.在道路上行驶时,突然冒出的儿童、自行车、动物等造成碰撞危险的可能性很大。尤其,在夜间行驶山道或乡道等昏暗的道路时,动物和障碍物会增加碰撞风险。在这种情况下,可以通过自动紧急制动系统(autonomous emergency braking,aeb)减少碰撞风险。
3.一般地,车辆的aeb是,当车辆在行驶中感测到车辆前方有先行移动体(汽车等包括车辆的可移动装置)、外部对象(包括行人在内的移动人员、静态的设施,如人行道、护栏、路缘石等道路周围的设施)等危险障碍物时,根据感测到的与危险障碍物的碰撞风险度警告驾驶员碰撞风险或在必要时执行自动制动以防止碰撞事故的系统,近年来,随着aeb被逐渐扩大应用并标准化,其需要同时满足可以在比现有的aeb系统更多的场景下操作的扩大使用性方面和防止碰撞的确保稳定性方面等两种情况。
4.然而,由于aeb存在识别延迟的问题和识别后对目标选定的准确度问题或由aeb直接控制前产生的延迟时间,而存在难以应对所有碰撞风险的缺点。
技术实现要素:
5.(一)要解决的技术问题
6.在这种背景下,本公开旨在提供一种设置第一间隔基准线和第二间隔基准线,并根据对象的类型设置警报的降低碰撞风险的装置及方法。
7.(二)技术方案
8.为了解决上述技术问题,在一方面,本公开提供一种降低碰撞风险的装置,其包括:接收单元,从传感器接收感测到靠近至距本车辆规定距离内的对象的对象信息;间隔设置单元,将本车辆行驶方向的左右方向上的预定间隔设置为第一基准间隔,并将比第一基准间隔宽预定间隔的间隔设置为第二基准间隔;控制单元,当对象靠近至第二基准间隔内时,基于对象的信息判断对象的类型并设置包括对象的位置和类型的警报,当对象靠近至第一基准间隔内时,基于对象的类型设置用于回避与对象的碰撞的警报;以及输出单元,输出设置的所述警报。
9.在另一方面,本公开提供一种降低碰撞风险的方法,其包括:对象感测步骤,获取感测到靠近至距本车辆规定距离内的对象的对象信息;基准间隔设置步骤,将本车辆行驶方向的左右方向上的预定间隔设置为第一基准间隔,并将比第一基准间隔宽预定间隔的间隔设置为第二基准间隔;第二基准间隔警报设置步骤,当对象靠近至第二基准间隔内时,基于对象的信息判断对象的类型并设置包括对象的位置和类型的警报;第一基准间隔警报设置步骤,当对象靠近至第一基准间隔内时,基于对象的类型设置用于回避与对象的碰撞的警报;以及警报输出步骤,控制以输出设置的警报。
10.(三)有益效果
11.根据本公开,可以提供一种降低碰撞风险的装置及方法,其中降低碰撞风险的装置根据预先设置的间隔和对象的类型来设置警报,从而可以快速且准确地设置用于回避碰撞风险的警报。
附图说明
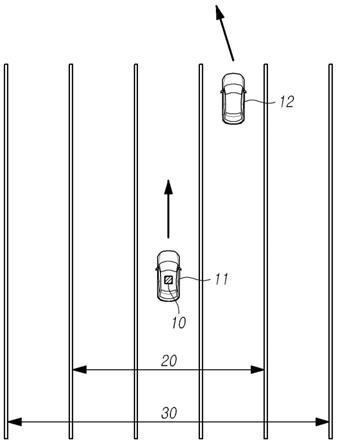
12.图1是用于说明根据本公开的一个实施例的降低碰撞风险的装置的图。
13.图2是根据一个实施例的降低碰撞风险的装置的框图。
14.图3和图4是用于说明根据一个实施例的根据对象的类型和对象的移动而未设置警报的图。
15.图5是示例性地示出根据一个实施例的对靠近至第一基准间隔内的对象的警报的输出结果的图。
16.图6是示意性地示出根据一个实施例的对靠近至第二基准间隔内的对象的警报的输出结果的图。
17.图7是用于说明根据一个实施例的与靠近至第二基准间隔内的对象对应地控制本车辆的智能巡航控制(smart cruise control,scc)行驶的图。
18.图8是用于说明根据本公开的一个实施例的降低碰撞风险的方法的流程图。
19.附图标记说明
20.10:降低碰撞风险的装置
ꢀꢀꢀꢀꢀꢀ
11:本车辆
21.12:对象
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20:第一基准间隔
22.30:第二基准间隔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
210:接收单元
23.220:间隔设置单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
230:控制单元
24.240:输出单元
具体实施方式
25.以下,参照示例性附图对本公开的部分实施例进行详细说明。在对各附图的组件赋予附图标记时,相同的组件即使被表示在不同的附图中,也可以尽可能具有相同的附图标记。另外,在说明本实施例时,如果判断对相关的公知组件或功能的具体说明可能会模糊本技术思想的要旨,则可能会省略对其的详细说明。当使用本说明书中提及的“包括”、“具有”、“组成”等时,除非使用“仅~”,否则可以增加其他部分。当以单数表示组件时,除非有特别的明确记载,否则可以包含包括复数的情况。
26.另外,在说明本公开的组件时,可以使用第一、第二、a、b、(a)、(b)等术语。这些术语仅用于将组件与其他组件区分开来,而相应组件的本质、次序、顺序或数量等不受这些术语的限制。
27.在说明组件的位置关系时,当记载着两个以上的组件“连接”、“结合”或“相连”等的情况下,应理解为两个以上的组件可以直接“连接”、“结合”或“相连”,也可以进一步“夹设”其他组件而“连接”、“结合”或“相连”。其中,其他组件可以被包括在彼此“连接”、“结合”或“相连”的两个以上的组件中的至少一个中。
28.在说明组件或者有关操作方法或制作方法等的时间流关系时,例如,在用“~之
后”、“~接着”、“~然后”、“~之前”等说明时间前后关系或流程前后关系的情况下,除非使用“即刻”或“直接”等,否则可以包括并不连续的情况。
29.另一方面,当提及组件的数值或其对应信息(例如,等级等)时,即使没有单独的明确记载,也可以解释为数值或其对应信息包括可能因各种原因(例如,工艺上的原因、内部或外部冲击、噪音等)而产生的误差范围。
30.以下参照图1对根据本公开的降低碰撞风险的装置10进行说明。
31.图1是用于说明根据本公开的一个实施例的降低碰撞风险的装置10的图。
32.参照图1,降低碰撞风险的装置10可以感测对象12以获取对象12的信息,并设置第一基准间隔20和第二基准间隔30,以在对象12靠近至第二基准间隔内时,判断对象12的类型并设置包括对象12的位置和类型的警报,并在对象12靠近至第一基准间隔20内时,基于对象12的类型设置并输出用于回避与对象12的碰撞的警报。
33.其中,第一基准间隔20和第二基准间隔30是为了向乘坐在本车辆11上的驾驶员通知对象12的信息而设置的间隔,可以在本车辆11的行驶方向的左右方向上设置。第二基准间隔30可以是用于通过警报对象12的存在来对周围引起注意的基准间隔。另外,第一基准间隔20可以是由于对象12可能对本车辆11的行驶造成危险而通知需要制动本车辆11的基准间隔。
34.本车辆11可以是安装有包括降低碰撞风险的装置10的驾驶员辅助系统的车辆。
35.其中,对象12可以是车辆、动物、行人、骑行人以及障碍物等。
36.图2是根据一个实施例的降低碰撞风险的装置10的框图。
37.参照图2,降低碰撞风险的装置10可以包括接收单元210、间隔设置单元220、控制单元230以及输出单元240等。
38.接收单元210可以从传感器获取感测到靠近至距本车辆11规定距离内的对象12的对象信息。
39.其中,为了感测所述对象12,传感器可以包括相机等图像传感器、将周围实现为3d模型的雷达系统、可测量距离的激光传感器或红外线传感器中的至少一个。
40.本公开中使用的雷达传感器或雷达系统可以包括至少一个雷达传感器单元,例如,安装在车辆正面的正面感测雷达传感器、安装在车辆后方的后方雷达传感器以及分别安装在车辆两侧的侧方或侧后方感测雷达传感器中的至少一个。这些雷达传感器或雷达系统可以分析发送信号和接收信号以处理数据,并基于此检测出对象12的信息,为此,可以包括电子控制单元(ecu)或者处理器。从雷达传感器到ecu的数据传输或信号通信可以利用适当的如车辆网络总线等的通信链接。
41.接收单元210可以从对象信息获取与对象12的距离、对象12的类型、对象12的移动方向、与对象12的预测碰撞位置等信息。
42.另外,接收单元210可以从传感器进一步接收位于距本车辆规定距离内的静止对象的信息。
43.间隔设置单元220可以将在本车辆11行驶方向的左右方向上预定的间隔设置为第一基准间隔20,并将比第一基准间隔20宽预定间隔的间隔设置为第二基准间隔30。
44.其中,可以根据本车辆11的行驶情况将第一基准间隔20和第二基准间隔30设置为不同以符合行驶情况。例如,当本车辆11在高速公路上行驶时,间隔设置单元220可将本车
辆11的两侧车道的左右两端线的间隔设置为第一基准间隔20。并且,间隔设置单元220可将所述第一基准间隔20的下一个两侧车道的两端线的间隔设置为第二基准间隔30。作为另一示例,当在可视距离短的乡道上时,间隔设置单元220可以设置左右宽度比所述高速公路上设置的第一基准间隔宽的第一基准间隔20。与此同时,间隔设置单元220可以设置左右宽度比所述高速公路上设置的第二基准间隔宽的第二基准间隔30。
45.如上所述,由于降低碰撞风险的装置10不考虑基准间隔以外的地方,因此可以提高计算速度,并且通过分别对第一基准间隔20和第二基准间隔30设置不同的警报,可以向用户更直观地传递信息。
46.当对象12靠近至第二基准间隔30内时,控制单元230基于对象12的信息判断对象12的类型,从而可以设置包括对象12的位置和类型的警报。并且,当对象12靠近至第一基准间隔20内时,控制单元230可以基于对象12的类型设置用于回避与对象12的碰撞的警报。另外,控制单元230可以控制使得设置的警报通过输出单元240输出。
47.控制单元230可以将对象12判断为车辆、行人、障碍物或动物中的任一个。具体地,控制单元230在判断对象12的类型时,可以基于通过图像传感器、调频连续波(fmcw)雷达、雷达系统等获取的信息进行判断。另外,控制单元230可以基于对象12的位置、类型、图像以及状态等,并使用大数据来判断对象12的类型。在一个实施例中,控制单元230可以利用道路边缘(edge)将驾驶员驾驶方向上的道路宽度和路缘石等判断为障碍物。
48.当对象12靠近至第一基准间隔20内时,控制单元230可以设置包括与对象12的距离、预计碰撞地点以及碰撞所需时间中的至少一个的警报。具体地,控制单元230从接收单元210接收对象12的信息,并且可以控制以设置并输出包括靠近至第一基准间隔内的对象与本车辆11的距离、对象12与本车辆11的预计碰撞地点以及对象12与本车辆11的碰撞所需时间中的至少一个的警报。
49.图3和图4是用于说明根据一个实施例的根据对象12的类型和对象12的移动而未设置警报的图。
50.为了更快的计算,控制单元230可以仅限于在存在碰撞可能性的情况下设置警报,而不是对对象12的所有动作都设置警报。这种设置可以在行驶前预先设置,也可以根据情况而基于控制单元230的碰撞可能性的判断结果实时进行。例如,当对象12的预测移动路径与本车辆11的预测移动路径产生交叉点时,控制单元230可以视为存在碰撞可能性并设置警报,如果没有交叉点则可以不设置警报。
51.因此,控制单元230可以根据对象12的类型和特定情况而不设置警报。
52.参照图3,当对象12为行人且行人以本车辆11的中央为基准向远离本车辆11的方向移动时,控制单元230可以不设置警报。例如,在以本车辆11的中央为基准行人位于左侧的情况下,当行人向左侧移动时,控制单元230可以不设置警报。作为另一示例,在以本车辆11的中央为基准行人位于右侧的情况下,当行人向右侧移动时,控制单元230可以不设置警报。
53.参照图4,当对象12为车辆且以本车辆11的中央为基准纵向远离时,控制单元230可以不设置警报。在这种情况下,即使本车辆11的预测移动路径与对象12的预测移动路径一致,由于不存在本车辆11和对象12碰撞的可能性,因此控制单元230可以不设置警报。然而,当所述对象12在远离后减速并且本车辆11接近对象12时,控制单元230可以设置用于回
避碰撞的警报。
54.当在第二基准间隔30内感测到的对象12向靠近第一基准间隔20的方向以高于或等于预定速度移动时,控制单元230可以设置用于回避危险的警报。
55.具体地,虽然针对在第二基准间隔30内感测到的对象12设置包括对象12的位置和类型的警报,但由于没有靠近至第一基准间隔20内,因此控制单元230可以不设置包括进一步具体的信息的警报。然而,当在第二基准间隔30内感测到的对象12朝向靠近第一基准间隔20的方向且这些对象12的速度在第一基准间隔20内被感测到的情况下控制单元230设置警报时,驾驶员的应对时间可能会不足。因此,为了提供用于回避碰撞的应对时间,当以高于或等于预定速度向第一基准间隔20方向靠近时,控制单元230可以设置用于回避危险的警报。
56.当在第一基准间隔20内存在对象12而仍没有设置警报时,控制单元230可以通过预定的车道间隔来设置通知对象12的碰撞风险的警报。例如,当本车辆11在单幅式行车道行驶时,第一基准间隔20可被设置为超出中心线的旁边车道。在这种情况下,即使对象12靠近至第一基准间隔20内,控制单元230也不设置警报。然而,控制单元230可以感测第一基准间隔20内的对象12的移动,并判断对象12是否靠近至第一基准间隔20内设置的车道间距,以设置通知碰撞风险的警报。
57.当所述对象12与本车辆11的碰撞所需时间在临界点以下时,控制单元230可以设置本车辆11的车道变更警报。对于靠近第一基准间隔20的对象12与本车辆11的碰撞所需时间,当判断为本车辆11通过减速或加速来回避时有障碍物(blockage)或者回避时间不足时,控制单元230可以设置本车辆11的车道变更警报。另外,在上述情况下,当两侧车道上已经存在其他车辆而被判断为不存在用于本车辆11变更车道的空间时,控制单元230可以设置使得与靠近的对象12的碰撞程度为最小的警报。
58.如上所述,降低碰撞风险的装置10可以根据对象12的类型设置不同的警报,从而更准确地判断周围情况以设置碰撞风险的警报,并且可以区分没有危险的情况来不设置警报。
59.图5是示意性地示出根据一个实施例的对靠近至第一基准间隔20内的对象12的警报的输出结果的图。
60.参照图5的(a),控制单元230可以对靠近至第一基准间隔20内的对象12设置警报,并控制使得设置的警报通过输出单元240输出。控制单元230可以在设置表示警告含义的感叹号的同时,将作为对象12类型的动物设置为a(animal(动物)),将表示本车辆11的速度需降到20km/h以下的含义设置为20km/h
↓
,将表示停止前照灯输出的含义设置为前照灯关闭(light off),将表示输出鸣笛声的含义设置为鸣笛开启(alarm on)。
61.另外,参照图5的(b),控制单元230可将表示行人的含义设置为p(pedestrian(行人)),将表示从左侧20m靠近的含义设置为20
→
,将表示车道向右侧变更的含义设置为车道(lane)
→
。此外,为了表示除上、下、左、右箭头以外的方向的斜向靠近的对象12,还可以表示为
‘↖
、
↗
、
↙
、
↘’
等。
62.上述警报可以设置为仅输出针对最靠近本车辆11的对象12的警报,也可以设置为输出靠近至第一基准间隔20内的所有对象12的警报。
63.图6是示意性地示出根据一个实施例的靠近至第二基准间隔30内的对象12的警报
的输出结果的图。
64.控制单元230可以根据对象12的位置设置警报以输出到根据预设条件的位置上。参照图6,控制单元230可以设置警报以在二维正方形平面上显示靠近本车辆11的对象12。另外,控制单元230可以将警报设置为,以本车辆11为基准,将从左侧靠近的对象12输出在左侧,将从前方和后方靠近的对象12输出在中央,将在第二基准间隔30内感测到的动物输出在北侧。其中,c(car)表示车辆,并且将警报设置为与感测到的动物的位置无关地输出在北侧是因为无法预测动物的移动路径,并且会存在突发变数。其中,从前方纵向靠近的对象12可以表示车道区分不明显并且道路宽度变窄的情况。另外,这种位置只是一个实施例,不局限于特定方向,其表现方式也不受箭头、字母缩写等方式的限制。
65.当前方道路宽度相比于本车辆11正在行驶的道路宽度变窄到基准值以上时,控制单元230可以设置用于通知所述事实的警报。
66.图7是用于说明根据一个实施例的与靠近至第二基准间隔30内的对象12对应地控制本车辆11的智能巡航控制(smart cruise control,scc)行驶的图。
67.参照图7,当通过智能巡航控制(smart cruise control,scc)行驶时对象12靠近至第二基准间隔30内时,控制单元230可以控制以使本车辆11执行自动紧急制动(automatic emergency break,aeb)。另外,当在scc行驶中感测到在规定距离内(优选为50m内)移动的对象12时,即使对象12没有靠近至第二基准间隔30内,控制单元230也可以控制本车辆11限制(优选为80%)设置的scc的加速度。
68.当静止对象(未示出)位于所述第二基准间隔30内并预计在规定时间内移动时,控制单元230基于静止对象的信息设置包括对象的位置和类型的警报,当静止对象位于所述第一基准间隔20内并预计在规定时间内移动时,控制单元230基于静止对象的信息设置用于回避与对象的碰撞的警报。
69.具体地,控制单元230可以从接收单元210接收静止对象的信息,并判断静止对象是否预计在规定时间内移动。例如,当静止对象的一部分突出,并且突出的一部分被判断为车辆的门时,控制单元230可以判断静止对象预计会在规定时间内移动。作为另一示例,当静止对象被判断为车辆,并且在静止对象周围存在被判断为行人的对象时,控制单元230可以判断静止对象预计会在规定时间内移动。另外,结合上述示例,当被判断为车辆的静止对象的门被打开的对象周围存在被判断为行人的对象时,控制单元230可以判断静止对象预计会在规定时间内移动。作为另一示例,当距本车辆规定距离内存在人行道并且被判断为行人的静止对象位于人行道周围时,控制单元230可以判断静止对象预计会在规定时间内移动。当然,即使没有人行道,当被判断为行人的静止对象位于行驶车道周围时,控制单元230可以判断静止对象预计会在规定时间内移动。其中,静止对象的预测方向可基于对象做出的手势(gesture)、姿势(pose)以及对象的重心来判断。
70.控制单元230可以将预计会移动的静止对象视为移动的对象,并根据静止对象所在的基准间隔来设置警报。例如,当静止对象位于第二基准间隔30内时,控制单元230可以设置包括静止对象的位置和类型的警报。作为另一示例,当静止对象位于第一基准间隔20内时,控制单元230可以设置用于回避静止对象与本车辆的碰撞的警报。其中,预计碰撞时间的计算可以从对象静止的条件被解除的时刻开始计算。例如,对象静止的条件被解除可以是由于信号灯的信号变化使得被判断为行人的静止对象可以通过人行道的情况,或者是
被判断为开着门的车辆的静止对象中静止对象的门被关闭的情况,或者是被判断为位于车辆周围的行人的静止对象乘坐车辆的情况。
71.如上所述,降低碰撞风险的装置10可以通过预先判断预计会移动的对象来降低意外的碰撞风险。
72.输出单元240可以从控制单元230接收警报的信息并输出警报的信息。输出单元240可以包括avn(音频(audio)、视频(video)、导航(navigation))以进行输出。
73.输出单元240可以包括hud(抬头显示器)模块,所述hud模块设置在本车辆11的内部,并且输出从控制单元230接收的警报的信息。
74.输出单元240可以将根据对象12的位置的警报输出到基于预设条件的位置上。
75.如上所述,降低碰撞风险的装置10可以通过向用户提供简单地包括用于回避碰撞的信息来更直观地传递信息。
76.本公开的降低碰撞风险的装置10可以实现为电子控制单元(electronic control unit,ecu)。电子控制单元可以包括至少一个处理器、存储器、存储单元、用户界面输入单元以及用户界面输出单元230中的至少一个组件,这些组件可以通过总线彼此通信。另外,电子控制单元还可以包括用于连接网络的网络接口。处理器可以是执行存储在存储器和/或存储单元中的处理指令的cpu或半导体元件。存储器和存储单元可以包括各种类型的易失性/非易失性存储介质。例如,存储器可以包括rom和ram。
77.以下,对使用能够执行所有上述本公开的降低碰撞风险的装置10的降低碰撞风险的方法进行说明。
78.图8是用于说明根据本公开的一个实施例的降低碰撞风险的方法的流程图。
79.参照图8,根据本公开的降低碰撞风险的方法可以包括:对象12感测步骤s810,感测靠近至距本车辆11规定距离内的对象12并获取信息;基准间隔设置步骤s820,将本车辆11行驶方向的左右方向上的预定间隔设置为第一基准间隔20,并将比第一基准间隔20宽预定间隔的间隔设置为第二基准间隔30;第二基准间隔警报设置步骤s830,当对象12靠近至第二基准间隔30内时,基于对象12的信息判断对象12的类型并设置包括对象12的位置和类型的警报;第一基准间隔警报设置步骤s840,当对象12靠近至第一基准间隔20内时,基于对象12的类型设置用于回避与对象12的碰撞的警报;以及警报输出步骤s850,控制以输出设置的警报。其中,对象的类型可以被判断为车辆、行人、障碍物或动物中的任一个。
80.在第一基准间隔警报设置步骤s840中,当对象12靠近至第一基准间隔20内时,可以设置包括与对象12的距离、与对象12的预计碰撞地点以及碰撞所需时间中的至少一个的警报。
81.在第一基准间隔警报设置步骤s840中,当对象12为行人且以本车辆11的中央为基准行人向远离本车辆11的方向移动时,可以不设置警报。
82.在第一基准间隔警报设置步骤s840中,当对象12为车辆且以本车辆11的中央为基准纵向远离时,可以不设置警报。
83.在第二基准间隔警报设置步骤s830中,当在第二基准间隔30内感测到的对象12向靠近第一基准间隔20的方向以高于或等于预定速度移动时,可以设置用于回避危险的警报。另外,在第二基准间隔30警报设置步骤中,当对象12与所述本车辆11的碰撞所需时间在临界点以下时,可以设置本车辆11的车道变更警报。
84.在警报输出步骤s850中,可以通过设置在本车辆11内部的hud模块输出设置的警报的信息。
85.在警报输出步骤s850中,可以将根据感测的对象12的位置的警报输出到基于预设条件的位置上。
86.在对象感测步骤s810中,可以进一步接收位于距本车辆规定距离内的静止对象的信息。
87.在第二基准间隔警报设置步骤s830中,当静止对象位于第二基准间隔30内并且预计会在规定时间内移动时,可以基于静止对象的信息设置包括静止对象的位置和类型的警报。
88.在第一基准间隔警报设置步骤s840中,当静止对象位于第一基准间隔20内并且预计会在规定时间内移动时,可以基于静止对象的信息设置用于回避与静止对象的碰撞的警报。
89.如上所述,根据本公开,可以提供一种降低碰撞风险的装置及方法,其中降低碰撞风险的装置10根据预先设置的间隔和对象的类型来设置警报,从而可以快速且准确地设置用于回避碰撞风险的警报。
90.如上所述,提供降低碰撞风险的装置及方法的技术可以被实现为可以通过各种计算机组件执行的程序指令的形式,并记录在计算机可读记录介质中。所述计算机可读记录介质可以包括单独或组合的程序指令、数据文件、数据结构等。
91.记录在所述计算机可读记录介质中的程序指令是为本发明专门设计和配置的,并且还可以是计算机软件领域的技术人员公知并使用的。
92.作为计算机可读记录介质的示例,可以包括:硬盘、软盘以及磁带等磁性介质;cd-rom、dvd等光记录介质;软式光盘(floptical disk)等磁光介质(magneto-optical media);以及rom、ram、闪存等为存储和执行程序指令而专门配置的硬件装置。
93.以上的说明仅仅是示例性地说明了本公开的技术思想,本公开所属技术领域的普通技术人员可以在不脱离本技术思想的本质特性的范围内进行各种修改和变形。另外,本实施例是用于说明而不是限制本公开的技术思想,因此本技术思想的范围不限定于这些实施例。本公开的保护范围由权利要求书解释,并且应解释为与其等同范围内的所有技术思想包括在本公开的权利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1