车载视觉采集模组及无人车的制作方法
1.本公开涉及无人车技术领域,具体地,涉及一种车载视觉采集模组及无人车。
背景技术:
2.无人车、或具有无人驾驶辅助系统的乘用车等车辆的外部需要多个车载视觉采集组件,例如摄像头等,该车载视觉采集组件用于感知和监测车辆的外界环境,并产生控制决策,进而为车辆的行驶提供参考。由于车载视觉采集组件设置在车辆的外部,通常会设置安装罩用于集中安装和保护多个车载视觉采集组件,但安装罩暴露在外界中容易吸附浮尘、雨水等污物,会引起感光及图像畸变问题,影响计算机视觉的处理结果,进而导致车辆控制出错。
技术实现要素:
3.本公开的目的是提供一种车载视觉采集模组及无人车,以解决相关技术中存在的上述问题。
4.为了实现上述目的,本公开提供了一种车载视觉采集模组,该车载视觉采集模组包括壳体、气体输送装置、液体输送装置以及回流管,所述壳体用于罩设在视觉采集组件的外部且包括用于透出所述视觉采集组件的透光部,所述壳体上设置有均位于所述透光部外侧的喷气嘴和喷液嘴,所述气体输送装置的出气口和所述液体输送装置的出液口分别与所述喷气嘴和喷液嘴连通,以使所述喷气嘴和所述喷液嘴能够分别向所述透光部的外表面喷射气体和液体,所述壳体上形成有集水槽,所述集水槽位于所述透光部的外侧且位于所述喷气嘴和所述喷液嘴的下方,所述集水槽用于收集所述喷液嘴喷出的液体,所述回流管的入口与所述集水槽连通,所述回流管的出口与所述液体输送装置连通。
5.可选地,所述壳体包括相对设置的顶板和底板、以及位于所述顶板和底板之间的透光侧板,所述顶板、所述底板以及所述透光侧板共同围成用于容纳所述视觉采集组件的容纳空间,所述透光部为所述透光侧板,所述顶板的外周缘向外凸出于所述透光侧板并形成第一凸缘,所述喷气嘴和所述喷液嘴设置在所述第一凸缘上,所述底板的外周缘向外凸出于所述透光侧板并形成第二凸缘,所述集水槽形成在所述第二凸缘上。
6.可选地,所述第一凸缘上形成有开口向下的第一凹槽和第二凹槽,所述喷气嘴设置在所述第一凹槽的顶壁上,所述喷液嘴形成在所述第二凹槽的顶壁上,所述第一凹槽靠近所述透光侧板的第一导向侧壁从所述第一凹槽的顶壁朝向所述透光侧板倾斜延伸,所述第二凹槽靠近所述透光侧板的第二导向侧壁从所述第二凹槽的顶壁朝向所述透光侧板倾斜延伸。
7.可选地,所述顶板上形成有位于所述壳体内部的第一通孔和第二通孔,所述第一凸缘上形成有第三通孔和第四通孔,所述第一通孔的轴线和所述第二通孔的轴线均与水平方向平行,所述第三通孔的轴线和所述第四通孔的轴线均与竖直方向平行,所述顶板内形成有连通所述第一通孔和所述第三通孔的第一内部流道、连通所述第二通孔和所述第四通
孔的第二内部流道;
8.所述气体输送装置包括输气管,所述输气管的入口位于所述壳体外部,所述输气管的出口穿过所述底板并与所述第一通孔连接,所述喷气嘴设置在所述第三通孔处,所述气体输送装置的出气口为所述输气管的出口;
9.所述液体输送装置包括输液管,所述输液管的入口位于所述壳体外部,所述输液管的出口穿过所述底板并与所述第二通孔连接,所述喷液嘴设置在所述第四通孔处,所述液体输送装置的出液口为所述输液管的出口。
10.可选地,所述底板上形成有位于所述壳体外部的第五通孔,所述集水槽内形成有第六通孔,所述第五通孔的轴线与水平方向平行,所述第六通孔的轴线与竖直方向平行,所述底板内形成有连通所述第五通孔和所述第六通孔的第三内部流道,所述回流管的入口与所述第五通孔连接。
11.可选地,所述喷液嘴位于所述喷气嘴与所述透光部之间。
12.可选地,所述喷气嘴的高度大于所述喷液嘴的高度。
13.可选地,所述喷气嘴为多个,多个所述喷气嘴沿所述壳体的周向间隔设置,所述喷液嘴为多个,多个所述喷液嘴沿所述壳体的周向间隔设置,所述集水槽形成为沿所述壳体的周向延伸的环形集水槽。
14.可选地,所述液体输送装置包括水泵、储水罐以及输液管,所述水泵和所述储水罐位于所述壳体的外部,所述回流管的出口与所述储水罐连通,所述水泵的入口与储水罐的出口连通,所述水泵的出口与所述输液管的入口连通,所述输液管的出口与所述喷液嘴连通,所述液体输送装置的出液口为所述输液管的出口,所述水泵和/或所述储水罐内设置有滤芯。
15.可选地,所述视觉采集组件能够识别所述透光部上是否存在污物,所述水泵能够在所述视觉采集组件识别到所述透光部上存在污物的情况下启动,以使所述喷液嘴向所述透光部喷射液体。
16.可选地,所述气体输送装置包括气泵和输气管,所述气泵的入口用于与气源连通,所述气泵的出口与所述输气管的入口连通,所述输气管的出口与所述喷气嘴连通,所述气体输送装置的出气口为所述输气管的出口。
17.可选地,所述气泵用于在无人车上的雨量传感器检测到的雨量信息满足预设条件时启动,以使所述喷气嘴向所述透光部喷射气体。
18.本公开还提供了一种无人车,包括上述的车载视觉采集模组。
19.通过上述技术方案,液体输送装置可以通过喷液嘴向透光部的外表面喷射液体,将透光部外表面上的脏污溶解并冲洗下来,防止灰尘或者泥土等脏污遮挡透光部而影响视觉采集组件的检测,气体输送装置能够通过喷气嘴向透光部的外表面喷射气体,将透光部上的残留的清洁液体或者雨水等液体吹散,保证透光部处于干净且干燥的状态,防止液体影响视觉采集组件感光而产生图像畸变等问题,提高车载视觉采集模组的检测可靠性。通过集水槽和回流管对清洗透光部的液体进行回收,能够避免液体滴落至其他结构上产生二次污染而影响车载视觉采集模组的功能,同时液体的多次循环利用能够减少浪费。
20.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
21.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
22.图1是本公开一种示例性实施方式提供的车载视觉采集模组的主视图;
23.图2是本公开一种示例性实施方式提供的车载视觉采集模组的立体图;
24.图3是本公开一种示例性实施方式提供的车载视觉采集模组的立体图,其中,未示出透光部;
25.图4是图3中“a”部分的放大图;
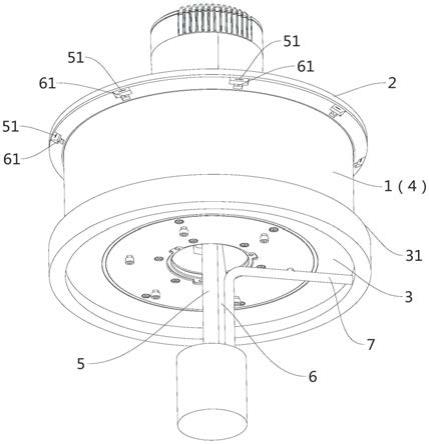
26.图5是本公开一种示例性实施方式提供的车载视觉采集模组的立体图(与图2不同视角);
27.图6是本公开一种示例性实施方式提供的车载视觉采集模组的立体图,其中,未示出透光部和部分顶板。
28.附图标记说明
29.10
‑
壳体;20
‑
视觉采集组件;1
‑
透光部;2
‑
顶板;21
‑
第一凸缘;211
‑
第一凹槽;2111第一导向侧壁;212
‑
第二凹槽;2121
‑
第二导向侧壁;22
‑
第一通孔;23
‑
第二通孔;3
‑
底板;31
‑
第二凸缘;32
‑
集水槽;33
‑
第六通孔;4
‑
透光侧板;5
‑
气体输送装置;51
‑
喷气嘴;52
‑
输气管;6
‑
液体输送装置;61
‑
喷液嘴;62
‑
输液管;7
‑
回流管。
具体实施方式
30.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
31.在本公开中,在未作相反说明的情况下,使用的方位词如“竖直方向、水平方向”是指车载视觉采集模组处于工作位置的竖直方向、水平方向,具体参照图1所示;“内、外”是指相对于部件或结构本身轮廓的“内、外”。此外,需要说明的是,使用的术语如“第一”、“第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。另外,在参考附图的描述中,不同附图中的同一标记表示相同的要素。
32.如图1至图6所示,本公开提供了一种车载视觉采集模组,该车载视觉采集模组包括壳体10、气体输送装置5、液体输送装置6以及回流管7,壳体10用于罩设在视觉采集组件20的外部且包括用于透出视觉采集组件20的透光部1,壳体10上设置有均位于透光部1外侧的喷气嘴51和喷液嘴61,气体输送装置5的出气口和液体输送装置6的出液口分别与喷气嘴51和喷液嘴61连通,以使喷气嘴51和喷液嘴61能够分别向透光部1的外表面喷射气体和液体,壳体10上形成有集水槽32,集水槽32位于透光部1的外侧且位于喷气嘴51和喷液嘴61的下方,集水槽32用于收集喷液嘴61喷出的液体,回流管7的入口与集水槽32连通,回流管7的出口与液体输送装置6连通。
33.这里,需要说明的是,上述的视觉采集组件20是指能够采集并存储图像的装置,例如摄像头、雷达、红外仪、激光传感器等装置。视觉采集组件20透过壳体10的透光部1采集外部信息,当透光部1的外表面有脏污(例如灰尘或者泥土等)时,液体输送装置6可以通过喷液嘴61向透光部1的外表面喷射液体,将透光部1外表面上的脏污溶解并冲洗下来。当有残留的清洁液体覆盖在透光部1,或者外界的雨水等溅射在透光部1的外部时,气体输送装置5
能够通过喷气嘴51向透光部1的外表面喷射气体,将透光部1上的液体吹散,起到烘干的作用,保证透光部1处于干净且干燥的状态,防止液体影响视觉采集组件20感光而产生图像畸变等问题。透光部1的外表面上流淌下来的液体可以收集至集水槽32内,一方面能够避免液体滴落至透光部1下方的其他结构上造成二次污染,另一方面集水槽32通过回流管7与液体输送装置6连通,将液体回收循环再次利用,从而避免液体的浪费。
34.通过上述技术方案,液体输送装置6可以通过喷液嘴61向透光部1的外表面喷射液体,将透光部1外表面上的污物溶解并冲洗下来,从而防止灰尘或者泥土等脏污遮挡透光部1而影响视觉采集组件20的检测,气体输送装置5能够通过喷气嘴51向透光部1的外表面喷射气体,将透光部1上的残留的清洁液体或者雨水等液体吹散,保证透光部1处于干净且干燥的状态,防止液体影响视觉采集组件20感光而产生图像畸变等问题,提高车载视觉采集模组的检测可靠性。通过集水槽32和回流管7对清洗透光部1的液体进行回收,能够避免液体滴落至其他结构上产生二次污染,同时液体的多次循环利用能够减少浪费。
35.壳体10罩设在视觉采集组件20的外部,对于不同的结构和功能的视觉采集组件20而言,壳体10可以形成为多种形状,作为一种示例性实施方式,如图2和图5所示,壳体10可以包括相对设置的顶板2和底板3、以及位于顶板2和底板3之间的透光侧板4,顶板2、底板3以及透光侧板4共同围成用于容纳视觉采集组件20的容纳空间,上述透光部1为透光侧板4,顶板2的外周缘向外凸出于透光侧板4并形成第一凸缘21,喷气嘴51和喷液嘴61设置在第一凸缘21上,底板3的外周缘向外凸出于透光侧板4并形成第二凸缘31,集水槽32形成在第二凸缘31上。由于第一凸缘21和第二凸缘31均向外凸出于透光侧板4,并且在透光侧板4的两侧相对设置,喷气嘴51和喷液嘴61设置在第一凸缘21上,集水槽32形成在第二凸缘31上,当喷液嘴61对透光侧板4进行喷液或者透光侧板4上有液体时,液体在重力作用下会自动地向第二凸缘31流动,从而能够快速离开透光侧板4并收集至集水槽32内得以回收利用,减少透光侧板4上的残留液体。透光侧板4上的残留液体少的情况下,喷气嘴51对透光侧板4进行喷气能够快速将透光侧板4吹干,透光侧板4恢复正常使用,减少清洁过程对车载视觉采集模组的影响时长。
36.喷气嘴51和喷液嘴61设置在第一凸缘21上,由于喷气嘴51和喷液嘴61所喷射出的气体和液体通常呈扇形分布,为了保证喷气嘴51和喷液嘴61所喷出的气体和液体能够到达透光部1的表面,可选地,如图2至图4所示,第一凸缘21上可以形成有开口向下的第一凹槽211和第二凹槽212,喷气嘴51设置在第一凹槽211的顶壁上,喷液嘴61形成在第二凹槽212的顶壁上,第一凹槽211靠近透光侧板4的第一导向侧壁2111从第一凹槽211的顶壁朝向透光侧板4倾斜延伸,倾斜的第一导向侧壁2111能够对喷气嘴51所喷射出的气体起到导向作用,使得气体能够向透光侧板4的外表面喷射,从而清除透光侧板4上的灰尘和液体;第二凹槽212靠近透光侧板4的第二导向2121侧壁从第二凹槽212的顶壁朝向透光侧板4倾斜延伸,以能够对喷液嘴61所喷射出的液体起到导向作用,使得液体能够向透光侧板4的外表面喷射,溶解并清洗透光侧板4上的脏污。并且,由于喷气嘴51设置在第一凹槽211的内部,喷液嘴61设置在第二凹槽212的内部,第一凹槽211和第二凹槽212能够分别对喷气嘴51和喷液嘴61起到保护作用,避免喷气嘴51和喷液嘴61凸出于第一凸缘21,防止喷气嘴51和喷液嘴61受到外界的损坏,提高使用寿命。
37.在壳体10包括透光侧板4的实施例中,视觉采集组件20通过透光侧板4从多个方向
采集外部信息,为了避免气体输送装置5和液体输送装置6在布置时对透光侧板4产生遮挡,可选地,如图3和图6所示,顶板2上可以形成有位于壳体10内部的第一通孔22和第二通孔23,第一凸缘21上形成有第三通孔和第四通孔,第一通孔22的轴线和第二通孔23的轴线均与水平方向平行,第三通孔的轴线和第四通孔的轴线均与竖直方向平行,顶板2内形成有连通第一通孔22和第三通孔的第一内部流道、连通第二通孔23和第四通孔的第二内部流道;气体输送装置5包括输气管52,输气管52的入口位于壳体10外部,输气管52的出口穿过底板3并与第一通孔22连接,喷气嘴51设置在第三通孔处,气体输送装置5的出气口为输气管52的出口;液体输送装置6包括输液管62,输液管62的入口位于壳体10外部,输液管62的出口穿过底板3并与第二通孔23连接,喷液嘴61设置在第四通孔处,液体输送装置6的出液口为输液管62的出口。
38.在上述的实施例中,如图2所示,输气管52和输液管62穿过底板3布置在壳体10的内部,并从壳体10的内部延伸至顶板2,输气管52和输液管62的延伸路径均位于视觉采集组件20的盲区内,能够避免对透光侧板4和视觉采集组件20的遮挡,保证视觉采集组件20具有良好的采光范围。另外,如图6所示,输气管52和输液管62穿过底板3后从壳体10内部延伸至顶板2,由于第一通孔22的轴线和第二通孔23的轴线均与水平方向平行,输气管52和输液管62的出口能够平行于水平方向布置并连通于第一通孔22和第二通孔23,从而减少输气管52和输液管62的弯折,保证输气管52和输液管62内部的流道通顺。输气管52的出口通过第一内部通道连通于喷气嘴51,输液管62的出口通过第二内部通道连通于喷液嘴61,通过第一内部通道和第二内部通道改变气体和液体的流动路径,使得平行于水平方向进入的气体和液体能够平行于竖直方向地流出以到达透光侧板4。
39.由于液体在喷射时需要的压力大于气体的压力,且喷气嘴51和喷液嘴61所喷射出的气体和液体通常呈扇形分布,可选地,喷液嘴61可以位于喷气嘴51与透光部1之间,即喷液嘴61相比于喷气嘴51在水平方向上更靠近于透光部1,喷气嘴51在透光部1上的气体喷射范围能够覆盖喷液嘴61的液体覆盖范围,喷气嘴51能够对透光部1上残留的液体进行全面的吹干,避免出现残留死角。
40.在对喷气嘴51和喷液嘴61进行布置时,由于喷气嘴51连通于气体输送装置5,喷液嘴61连通于液体输送装置6,气体输送装置5和液体输送装置6相对独立,为了便于布置,可选地,喷气嘴51和喷液嘴61可以在高度方向上错开布置。作为一种示例性实施方式,如图3和图4所示,喷气嘴51的高度可以大于喷液嘴61的高度。由于液体喷射所需的压力大于气体喷射所需的压力,喷气嘴51和喷液嘴61所喷射出的气体和液体通常呈扇形分布,喷液嘴61的高度较低能够更靠近于透光部1,减少对喷液压力的需求。同时,由于喷气嘴51的高度大于喷液嘴61的高度,喷气嘴51在透光部1上的气体喷射范围能够覆盖喷液嘴61的液体覆盖范围,从而保证喷气嘴51能够对透光部1上残留的液体进行清洁,避免液体残留在喷气盲区而影响视觉采集组件20的采光和检测,提高车载视觉采集模组的检测可靠性。在顶板2内形成有第一内部流道和第二内部流道的实施例中,喷气嘴51的高度大于喷液嘴61的高度时,第一内部流道和第二内部流道可以在竖直方向上错开布置,或者,如图6所示,第一内部流道和第二内部流道可以在水平方向上错开布置。
41.集水槽32内的液体能够通过回流管7流动至液体输送装置6中,可选地,如图3和图5所示,底板3上可以形成有位于壳体10外部的第五通孔,集水槽32内形成有第六通孔33,第
五通孔的轴线与水平方向平行,第六通孔33的轴线与竖直方向平行,底板3内形成有连通第五通孔和第六通孔33的第三内部流道,回流管7的入口与第五通孔连接。集水槽32内的液体可以通过第三内部流道进入回流管7,能够避免液体滴落至其他结构上产生二次污染而影响车载视觉采集模组的功能,例如,在车载视觉采集模组布置在无人车上时,集水槽32能够避免液体滴落至无人车上对无人车的行驶过程产生影响。由于第五通孔的轴线与水平方向平行,回流管7可以贴合在底板3下方并沿水平方向延伸以连通于第五通孔,避免在布置过程中和其他结构产生干涉。
42.可选地,回流管7可以位于壳体10的外部,以避免回流管7设置在壳体10内部占用壳体内部的空间。
43.集水槽32内的液体可以为清洗透光侧板4后的液体,也可以为雨水等外界液体,液体通过回流管7进入液体输送装置6后得到循环利用。可选地,液体输送装置6可以包括水泵、储水罐以及输液管62,水泵和储水罐位于壳体10的外部,回流管7的出口与储水罐连通,水泵的入口与储水罐的出口连通,水泵的出口与输液管62的入口连通,输液管62的出口与喷液嘴61连通,液体输送装置6的出液口为输液管62的出口,水泵和/或储水罐内设置有滤芯,该滤芯能够对液体进行过滤从而清除液体中的杂质和污物,过滤后的液体通过输液管62和喷液嘴61喷射至透光侧板4上对透光侧板4进行清洗,保证液体具有良好的清洗效果,避免二次污染。
44.上述的车载视觉采集模组可以应用在无人车上,并和无人车内部的控制器电连接,车载视觉采集模组用于采集外部信息,并将采取到的外部信息传送给无人车的控制器,以作为无人车进行自动驾驶的依据。为了能够及时对车载视觉采集模组的透光部1上的污物进行清洁,可选地,水泵和视觉采集组件20可以均用于与无人车的控制器电连接,视觉采集组件20设置为能够识别透光部1上是否存在污物,水泵能够在视觉采集组件20识别到透光部1上存在污物的情况下启动,以使喷液嘴61向透光部1喷射液体。这样,可以实现液体输送装置6对透光部1的自动清洗。
45.此外,气体输送装置5的结构可以有多种,可选地,气体输送装置5可以包括气泵和输气管52,气泵的入口用于与气源连通,气泵的出口与输气管52的入口连通,输气管52的出口与喷气嘴51连通,气体输送装置5的出气口为输气管52的出口。这里,气源可以为外界大气或者为车载储气罐,本公开对此不作限定。
46.为了保证车载视觉采集模组能够在雨天环境中正常使用,可选地,气泵用于与无人车的控制器电连接,控制器与雨量传感器电连接,气泵用于在无人车上的雨量传感器检测到的雨量信息满足预设条件时启动,以使喷气嘴51喷射气体。在雨天环境中,无人车上的雨量传感器检测到的雨量信息满足预设条件时,无人车的控制器能够控制气泵启动,以使喷气嘴51喷射气对透光部1上雨水进行清除,实现自动除水功能。
47.为了保证透光部1能够得到全面的清洁,可选地,喷气嘴51可以为多个,多个喷气嘴51沿壳体10的周向间隔设置,喷液嘴61可以为多个,多个喷液嘴61沿壳体10的周向间隔设置,集水槽32形成为沿壳体10的周向延伸的环形集水槽32。多个沿壳体10的周向间隔设置的喷气嘴51和喷液嘴61,能够在壳体10的周向形成环状的气体喷射范围和液体喷射范围,从而全面而彻底地覆盖透光部1,避免出现清洁死角,保证车载视觉采集模组的功能可靠性。其中,喷气嘴51和喷液嘴61和具体数量可以根据喷气嘴51和喷液嘴61的喷射角度、壳
体10的尺寸以及视觉采集组件20的布置方向共同确定,本公开对此不做具体限制。
48.本公开还提供了一种无人车,该无人车包括上述的车载视觉采集模组。可选地,上述的车载视觉采集模组可以通过安装支架安装在车辆的顶部。
49.这里,需要说明的是,上述无人车指的是依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的车辆。该无人车可以为,例如,在物流系统中用于配送货物的无人货物配送车辆,或者,用于配送外卖的无人外卖配送车辆,或者,用于在多个货架之间转运货物的无人转运车辆等。本公开对无人车的具体类型不做限定。
50.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
51.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
52.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1