一种基于数据融合的无人驾驶的智能控制方案
1.本发明涉及车辆无人驾驶技术领域,具体为一种基于数据融合的无人驾驶的智能控制方案。
背景技术:
2.无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目的,无人驾驶汽车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车,它是利用车载传感器来感知车辆周围环境,并根据感知所获得的道路、车辆位置和障碍物信息,控制车辆的转向和速度,从而使车辆能够安全、可靠地在道路上行驶。
3.目前,无人驾驶车辆的车载传感器种类繁多,但是单一传感器在无人驾驶感知道路环境的过程中存在挑战,单一传感器都具有各自的优点与缺点,导致感知信息不够完备且不够准确,从而影响了无人驾驶汽车的正常行驶,还可能导致出现安全问题,为此,本发明提供了一种基于数据融合的无人驾驶的智能控制方案来解决上述问题。
技术实现要素:
4.(一)解决的技术问题
5.1.要解决的技术问题
6.针对现有技术中存在的问题,本发明的目的在于提供一种基于数据融合的无人驾驶的智能控制方案,具备多传感器深度融合,传感器之间取长补短的优点,解决了单一传感器具有各自优缺点,导致感知信息不够完备准确,影响正常行驶,安全性低的问题。
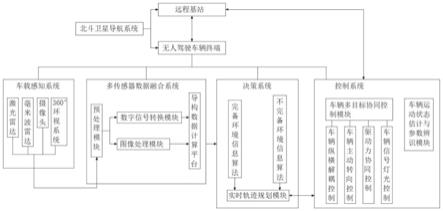
7.(二)技术方案
8.为实现上述目的,本发明提供如下技术方案:
9.一种基于数据融合的无人驾驶的智能控制方案,包括无人驾驶车辆终端、远程基站与北斗卫星导航系统,所述无人驾驶车辆终端与远程基站之间通过无线传输的方式传递信息与指令,所述北斗卫星导航系统用于构建无人驾驶车辆终端的路径并及时将信息传输至远程基站;
10.所述无人驾驶车辆终端包括有车载感知系统、多传感器数据融合系统、决策系统与控制系统,所述控制系统与远程基站之间通过无线传输的方式传递信息与指令,所述车载感知系统、多传感器数据融合系统、决策系统、控制系统之间通过导线电性连接。
11.优选的,所述车载感知系统包括有激光雷达、毫米波雷达、摄像头与360
°
环视系统。
12.优选的,所述多传感器数据融合系统包括有预处理模块,所述预处理模块的输入端与车载感知系统电性连接,所述预处理模块的输出端通过导线电性连接有数字信号转换模块与图像处理模块,所述数字信号转换模块与图像处理模块的输出端均通过导线电性连接有异构数据计算平台。
13.优选的,所述预处理模块包括有运动补偿、时间同步、传感器标定、多激光雷达的标定、传感器视场角,所述运动补偿包括有车辆运动补偿与被测物体运动补偿。
14.优选的,所述图像处理模块包括有图像预处理、图像分析、图像重建、图像平滑。
15.优选的,所述决策系统包括与异构数据计算平台电性连接的完备环境信息算法与不完备环境信息算法,所述完备环境信息算法与不完备环境信息算法的输出端电性连接有实时轨迹规划模块。
16.优选的,所述完备环境信息算法包括有基于深度逆向强化学习算法设计与基于学习的广义决策树算法设计,所述不完备环境信息算法为模糊算法,所述不完备环境信息算法包括有基于学习模糊自适应算法设计与部分可观马尔可夫决策算法设计。
17.优选的,所述控制系统包括有车辆多目标协同控制模块与车辆运动状态估计与参数辨识模块,所述车辆多目标协同控制模块包括有车辆纵横解耦控制、车辆主动转向控制、驱动力协同控制与车辆信号灯光控制。
18.(三)有益效果
19.与现有技术相比,本发明提供了一种基于数据融合的无人驾驶的智能控制方案,具备以下有益效果:
20.(1)通过车载感知系统记录图像,通判断车辆周围环境,并能够识别路牌、交通灯甚至文字信息,实现众多警示与识别等adas功能,测算目标的位置、速度等特征量,感知车辆周围环境,并形成精度高达厘米的3d环境地图,可全天候全天时使用,预处理模块进行数据融合,使得多传感器深度融合,传感器之间能够取长补短,帮助整个感知系统效果的提升,提升感知系统的精度,使得无人驾驶车辆安全性得到提高。
21.(2)通过将采集的信息分为完备环境信息与不完备环境信息,分别进行基于深度逆向强化学习算法设计与基于学习的广义决策树算法设计或基于学习模糊自适应算法设计与部分可观马尔可夫决策算法设计,对数据进行计算并通过实时轨迹规划模块进行驾驶轨迹的规划,通过控制系统进行车辆无人驾驶过程中的控制,并通过车辆运动状态估计与参数辨识模块将驾驶轨迹分别传递至远程基站与实时轨迹规划模块,进行调整修正与控制,远程基站可人工干预进行路线修正与紧急停止,提高安全性能。
附图说明
22.图1为本发明工作原理示意图。
具体实施方式
23.下面将结合本发明的实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.请参照图1:
25.实施例一:一种基于数据融合的无人驾驶的智能控制方案,包括无人驾驶车辆终端、远程基站与北斗卫星导航系统,所述无人驾驶车辆终端与远程基站之间通过无线传输的方式传递信息与指令,所述北斗卫星导航系统用于构建无人驾驶车辆终端的路径并及时
将信息传输至远程基站;
26.所述无人驾驶车辆终端包括有车载感知系统、多传感器数据融合系统、决策系统与控制系统,所述控制系统与远程基站之间通过无线传输的方式传递信息与指令,所述车载感知系统、多传感器数据融合系统、决策系统、控制系统之间通过导线电性连接。
27.进一步的,所述车载感知系统包括有激光雷达、毫米波雷达、摄像头、超声波测距雷达与360
°
环视系统,摄像头的作用主要就是记录图像,通过图像处理模块分析数据,进而判断车辆周围环境,并能够识别路牌、交通灯甚至文字信息,摄像机应用中摄像头的形式包括单目、双目和三目,安装位置分为前视、后视、环视和车内监控摄像头,实现众多警示与识别等adas功能;激光雷达是无人车驾驶最佳的技术路线,主要通过向目标物体发射激光束,然后通过计算从目标反射回的脉冲飞行时间来测量距离,以此测算目标的位置、速度等特征量,感知车辆周围环境,并形成精度高达厘米的3d环境地图;毫米波雷达空间分别率高,毫米波引导头穿透雾、烟、灰尘的能力强,传输距离远,性能稳定,不受目标物体形状、颜色等干扰,具有全天候全天时的特点;360
°
环视系统可观察车辆周围环境,提供自动停车并感知车辆周围环境。
28.实施例二:一种基于数据融合的无人驾驶的智能控制方案,包括无人驾驶车辆终端、远程基站与北斗卫星导航系统,所述无人驾驶车辆终端与远程基站之间通过无线传输的方式传递信息与指令,所述北斗卫星导航系统用于构建无人驾驶车辆终端的路径并及时将信息传输至远程基站;
29.所述无人驾驶车辆终端包括有车载感知系统、多传感器数据融合系统、决策系统与控制系统,所述控制系统与远程基站之间通过无线传输的方式传递信息与指令,所述车载感知系统、多传感器数据融合系统、决策系统、控制系统之间通过导线电性连接。
30.进一步的,所述车载感知系统包括有激光雷达、毫米波雷达、摄像头、超声波测距雷达与360
°
环视系统。
31.进一步的,所述多传感器数据融合系统包括有预处理模块,所述预处理模块的输入端与车载感知系统电性连接,所述预处理模块的输出端通过导线电性连接有数字信号转换模块与图像处理模块,所述数字信号转换模块与图像处理模块的输出端均通过导线电性连接有异构数据计算平台,通过预处理模块对车载感知系统采集的数据进行融合,使得多传感器深度融合,传感器之间取长补短,再经过图像处理模块与数字信号转换模块共同处理预处理模块融合的数据,并传递至异构数据计算平台进行计算处理。
32.进一步的,所述预处理模块包括有运动补偿、时间同步、传感器标定、多激光雷达的标定、传感器视场角,所述运动补偿包括有车辆运动补偿与被测物体运动补偿,在车辆自动驾驶感知过程中,传感器采集数据一般都不是瞬时发生的,例如激光雷达,车辆与障碍物、路标等都会发生一定的位移,感知系统检测出来的位置则不准确,需要进行运动补偿,通过车辆拥有比较准确的实时定位信息,提供t和t+1两个时刻内,车辆本身的姿态差距、利用姿态差,可比较容易的补偿自身移动了多少;无人驾驶车辆采用多个激光雷达,激光按照同样的方式旋转来探测周围,那么在某一个特定的时间段和驾驶方向,这些激光雷达应该扫描到相同的物体,在一定的程度上减少快速移动物体产生的拖影问题,进行被测物体运动补偿;时间同步在无人驾驶中也极为重要,目前常用gps时间戳的时间同步方法,但是时间同步的误差较大,所以本发明以激光雷达作为触发其他传感器的源头,当激光雷达转到
某个角度时,才触发该角度的摄像头,可以大大减少时间差的问题,误差较低,对齐效果也会更好;传感器标定也是多传感器深度融合的重要部分,传感器标定有外参标定与多激光雷达的标定,外参标定的核心是刚体的旋转,传感器外参的标定就是要找到一个刚体的旋转,把一个传感器的数据和另一个传感器对齐,相当于把一个传感器测量的数据从其本身的坐标系,通过刚体旋转,转到另一个传感器坐标系,这样就可以进行后续的数据融合,多激光雷达的标定通过激光雷达本身拥有完全的3d信息,解决两个数据集匹配的问题;传感器视场角也会与传感器深度融合相关,激光雷达、毫米波雷达、摄像头与超声波测距雷达都具有各自的优点与缺点,使用时存在一些局限性,通过预处理模块中的运动补偿、时间同步、传感器标定、多激光雷达的标定、传感器视场角,可以使得多传感器深度融合,传感器之间能够取长补短,帮助整个感知系统效果的提升,提升感知系统的精度,使得无人驾驶车辆安全性得到提高。
33.进一步的,所述图像处理模块包括有图像预处理、图像分析、图像重建、图像平滑,图像预处理使像质改善,如图像锐化、平滑、复原、校正等;图像分析包括有边缘与线的检测、区域分割、形状特征测量等;图像重建包括有投影图像重建、利用对象生成立体图像、全息图生成等;图像平滑属于低通滤波图像处理,保留图像空间频率的低频部分,减少图像的高频部分,低通滤波可以降低图像中的视觉噪声,同时取出图像中的高频成分后,图像中那些不明显的低频部分就更容易显现了。
34.实施例三:一种基于数据融合的无人驾驶的智能控制方案,包括无人驾驶车辆终端、远程基站与北斗卫星导航系统,所述无人驾驶车辆终端与远程基站之间通过无线传输的方式传递信息与指令,所述北斗卫星导航系统用于构建无人驾驶车辆终端的路径并及时将信息传输至远程基站;
35.所述无人驾驶车辆终端包括有车载感知系统、多传感器数据融合系统、决策系统与控制系统,所述控制系统与远程基站之间通过无线传输的方式传递信息与指令,所述车载感知系统、多传感器数据融合系统、决策系统、控制系统之间通过导线电性连接。
36.进一步的,所述车载感知系统包括有激光雷达、毫米波雷达、摄像头、超声波测距雷达与360
°
环视系统。
37.进一步的,所述多传感器数据融合系统包括有预处理模块,所述预处理模块的输入端与车载感知系统电性连接,所述预处理模块的输出端通过导线电性连接有数字信号转换模块与图像处理模块,所述数字信号转换模块与图像处理模块的输出端均通过导线电性连接有异构数据计算平台。
38.进一步的,所述预处理模块包括有运动补偿、时间同步、传感器标定、多激光雷达的标定、传感器视场角,所述运动补偿包括有车辆运动补偿与被测物体运动补偿。
39.进一步的,所述图像处理模块包括有图像预处理、图像分析、图像重建、图像平滑。
40.进一步的,所述决策系统包括与异构数据计算平台电性连接的完备环境信息算法与不完备环境信息算法,所述完备环境信息算法与不完备环境信息算法的输出端电性连接有实时轨迹规划模块。
41.进一步的,所述完备环境信息算法包括有基于深度逆向强化学习算法设计与基于学习的广义决策树算法设计,所述不完备环境信息算法为模糊算法,所述不完备环境信息算法包括有基于学习模糊自适应算法设计与部分可观马尔可夫决策算法设计。
42.通过采集的信息,分为完备环境信息与不完备环境信息,分别进行基于深度逆向强化学习算法设计与基于学习的广义决策树算法设计或基于学习模糊自适应算法设计与部分可观马尔可夫决策算法设计,对数据进行计算并通过实时轨迹规划模块进行驾驶轨迹的规划。
43.进一步的,所述控制系统包括有车辆多目标协同控制模块与车辆运动状态估计与参数辨识模块,所述车辆多目标协同控制模块包括有车辆纵横解耦控制、车辆主动转向控制、驱动力协同控制与车辆信号灯光控制,通过所述车辆多目标协同控制模块包括有车辆纵横解耦控制、车辆主动转向控制、驱动力协同控制与车辆信号灯光控制进行车辆无人驾驶过程中的控制,并通过车辆运动状态估计与参数辨识模块将驾驶轨迹分别传递至远程基站与实时轨迹规划模块,进行调整修正与控制。
44.本发明的工作原理是:通过车载感知系统中记录图像,通判断车辆周围环境,并能够识别路牌、交通灯甚至文字信息,实现众多警示与识别等adas功能,测算目标的位置、速度等特征量,感知车辆周围环境,并形成精度高达厘米的3d环境地图,可全天候全天时使用,车载感知系统采集的数据通过预处理模块进行数据融合,使得多传感器深度融合,传感器之间能够取长补短,帮助整个感知系统效果的提升,提升感知系统的精度,使得无人驾驶车辆安全性得到提高,再经过图像处理模块与数字信号转换模块共同处理预处理模块融合的数据,并传递至异构数据计算平台进行计算处理,处理后的信息分为完备环境信息与不完备环境信息,分别进行基于深度逆向强化学习算法设计与基于学习的广义决策树算法设计或基于学习模糊自适应算法设计与部分可观马尔可夫决策算法设计,对数据进行计算并通过实时轨迹规划模块进行驾驶轨迹的规划,通过控制系统进行车辆无人驾驶过程中的控制,并通过车辆运动状态估计与参数辨识模块将驾驶轨迹分别传递至远程基站与实时轨迹规划模块,进行调整修正与控制,解决了单一传感器具有各自优缺点,导致感知信息不够完备准确,影响正常行驶,安全性低的问题。
45.以上所述,仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1