车辆的控制装置的制作方法
1.本发明涉及具备发动机、电动机以及能够切断发动机与电动机之间的连结的离合器的车辆的控制装置。
背景技术:
2.具备发动机、以能够传递动力的方式连结于所述发动机与驱动轮之间的动力传递路径的电动机以及设置于所述动力传递路径中的所述发动机与所述电动机之间并通过控制离合器致动器来切换控制状态的离合器的车辆的控制装置是公知的。例如,日本特开2018-122814所记载的车辆的控制装置就是这种装置。在该日本特开2018-122814中公开了如下内容:在发动机起动时,通过控制离合器致动器以使离合器的控制状态从释放状态向卡合状态切换,并且控制电动机以便从电动机输出增大了与离合器的控制状态相匹配地提高发动机的转速的转矩量的转矩,从而使发动机起转,通过控制发动机以便在发动机转速达到能够初次燃烧的转速后进行燃料喷射、火花塞点火等起动控制而进行燃烧工作,从而起动发动机。
3.另外,当在发动机起动时与离合器的控制状态相匹配地控制电动机的情况下,如上述日本特开2018-122814所示,是以离合器实际卡合而能够传递转矩的定时与使电动机的输出转矩增大的定时相匹配的方式进行控制的程度。因此,通过适当地定义离合器的控制状态,存在能够提高发动机起动时的控制精度的余地。然而,当对离合器的控制状态过于精细地划分并定义时,发动机起动时的控制有可能会变得复杂。当发动机起动时的控制变得复杂时,有可能会导致开发工时的增大等。
技术实现要素:
4.发明所要解决的课题
5.本发明是以以上的情况为背景而完成的,其目的在于提供一种能够实现兼顾发动机起动时的控制精度的提高和控制的简化的车辆的控制装置。
6.本发明的第一方案的控制装置是如下车辆的控制装置,所述车辆具备:发动机;电动机,所述电动机以能够传递动力的方式连结于所述发动机与驱动轮之间的动力传递路径;以及离合器,所述离合器设置于所述动力传递路径中的所述发动机与所述电动机之间,并通过控制离合器致动器来切换控制状态,所述控制装置包括电子控制装置,所述电子控制装置构成为:在所述发动机起动时,控制所述离合器致动器以将所述离合器的控制状态从释放状态向卡合状态切换;在所述发动机起动时,控制所述电动机以使所述电动机输出提高所述发动机的转速的转矩,并且控制所述发动机以使所述发动机开始运转;基于第一阶段定义,控制所述离合器致动器,所述第一阶段定义定义了按照在所述发动机的起动过程中被切换的所述离合器的每个控制状态划分出的多个行进阶段;在控制所述电动机和所述发动机中的至少一方时,基于为了所述电动机及所述发动机的控制而定义了多个行进阶段且与所述第一阶段定义不同的第二阶段定义,控制所述电动机及所述发动机中的至少一
方。
7.根据上述方案,在发动机起动时,基于第一阶段定义,控制离合器致动器,以将离合器的控制状态从释放状态向卡合状态切换,所述第一阶段定义为了离合器致动器的控制而定义了按照在发动机的起动过程中被切换的离合器的每个控制状态划分出的多个行进阶段,基于为了电动机及发动机的控制而定义了所述多个行进阶段的第二阶段定义,控制电动机以使电动机输出提高发动机的转速的转矩,并且控制发动机以使发动机开始运转,因此能够与离合器的控制状态相匹配地独立且适当地控制离合器致动器和电动机及发动机。因此,能够实现兼顾发动机起动时的控制精度的提高和控制的简化。
8.在上述方案中,也可以是,所述第一阶段定义与所述第二阶段定义相比更精细地划分所述离合器的控制状态。在上述方案中,也可以是,由所述第一阶段定义定义的行进阶段的数量比由所述第二阶段定义定义的行进阶段的数量多。在上述方案中,也可以是,由所述第二阶段定义定义的至少一个行进阶段与由所述第一阶段定义定义的2个以上的行进阶段对应。
9.根据上述方案,所述第一阶段定义与所述第二阶段定义相比更精细地划分离合器的控制状态,因此在发动机起动时,能够在不使电动机及发动机的控制复杂化的情况下提高离合器致动器的控制精度,进而能够提高离合器的控制精度。
10.在上述方案中,也可以是,所述第一阶段定义具有多个行进阶段,所述多个行进阶段包括基于所述电动机与所述发动机的旋转同步过程中的所述离合器的控制状态而被定义的旋转同步初期、旋转同步中期及旋转同步终期。也可以是,所述第二阶段定义具有与至少所述旋转同步初期、所述旋转同步中期及所述旋转同步终期被整合为一个的期间对应的行进阶段。
11.根据上述方案,所述第一阶段定义具有包括基于电动机与发动机的旋转同步过程中的离合器的控制状态而被定义的旋转同步初期、旋转同步中期及旋转同步终期在内的多个行进阶段,所述第二阶段定义具有基于所述旋转同步过程中的离合器的控制状态而被定义的所述旋转同步初期、所述旋转同步中期及所述旋转同步终期被整合为一个的行进阶段,因此在发动机起动时,在电动机与发动机的旋转同步过程中,能够在不使电动机及发动机的控制复杂化的情况下提高离合器致动器的控制精度,进而能够提高离合器的控制精度。
12.在上述方案中,也可以是,所述第一阶段定义包括多个第一行进阶段,所述多个第一行进阶段基于所述离合器的要求液压和要求转矩中的至少一方变化的定时来定义行进阶段转变的定时。也可以是,所述第二阶段定义包括多个第二行进阶段,所述多个第二行进阶段基于所述离合器的要求转矩变化的定时、所述离合器的控制是否开始、以及所述发动机与所述电动机的转速之差是否满足预定的条件中的任一方来定义行进阶段转变的定时。
13.在上述方案中,也可以是,所述第一阶段定义基于切换所述离合器的控制状态的控制要求来定义。也可以是,所述第二阶段定义基于执行所述离合器的控制时的所述离合器的控制状态来定义。
14.根据上述方案,能够使用所述第一阶段定义,与想要控制的离合器的控制状态相匹配地适当控制离合器致动器。另外,能够使用所述第二阶段定义,与离合器的实际的控制状态相匹配地适当控制电动机及发动机。
附图说明
15.以下将参照附图来说明本发明的示例性实施方式的特征、优点、以及技术和工业重要性,其中同样的附图标记表示同样的部件,并且附图中:
16.图1是说明应用本发明的车辆的概略结构的图,并且是说明用于进行车辆中的各种控制的控制功能及控制系统的主要部分的图。
17.图2是示出k0离合器的一例的局部剖视图。
18.图3是说明内部控制用阶段定义中的各阶段的图表。
19.图4是说明外部公开用阶段定义中的各阶段的图表。
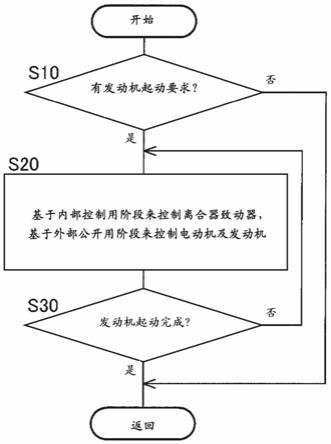
20.图5是说明电子控制装置的控制工作的主要部分的流程图,且是说明用于实现兼顾发动机起动时的控制精度的提高和控制的简化的控制工作的流程图。
21.图6a是示出执行了图5的流程图所示的控制工作的情况下的时序图的一例的图。
22.图6b是示出执行了图5的流程图所示的控制工作的情况下的时序图的一例的图。
具体实施方式
23.以下,参照附图详细说明本发明的实施例。
24.图1是说明应用本发明的车辆10的概略结构的图,并且是说明用于进行车辆10中的各种控制的控制功能及控制系统的主要部分的图。在图1中,车辆10是具备作为行驶用的驱动力源的发动机12及电动机mg的混合动力车辆。另外,车辆10具备驱动轮14和设置在发动机12与驱动轮14之间的动力传递路径中的动力传递装置16。
25.发动机12是汽油发动机或柴油发动机等公知的内燃机。关于发动机12,通过利用后述的电子控制装置90对设置于车辆10的包括节气门致动器、燃料喷射装置、点火装置等在内的发动机控制装置50进行控制,从而控制作为发动机12的输出转矩的发动机转矩te。
26.电动机mg是具有作为从电力产生机械动力的发动机的功能及作为从机械动力产生电力的发电机的功能的旋转电动机械,是所谓的电动发电机(公知简称为“mg”)。因此,在本技术的说明书中,“mg”不仅用作电动机的参照符号,例如有时也如“mg转矩”那样将电动机简称为“mg”。电动机mg经由设置于车辆10的逆变器52与设置于车辆10的电池54连接。关于电动机mg,通过利用后述的电子控制装置90控制逆变器52,从而控制作为电动机mg的输出转矩的mg转矩tm。例如在电动机mg的旋转方向是与发动机12的运转时相同的旋转方向即正转的情况下,mg转矩tm在成为加速侧的正转矩的情况下为动力运行转矩,在成为减速侧的负转矩的情况下为再生转矩。具体而言,电动机mg代替发动机12或在发动机12的基础之上,利用经由逆变器52从电池54供给的电力产生行驶用的动力。另外,电动机mg利用发动机12的动力或从驱动轮14侧输入的被驱动力进行发电。利用电动机mg的发电产生的电力经由逆变器52蓄积在电池54中。电池54是相对于电动机mg授受电力的蓄电装置。在不特别区分的情况下,所述电力也与电能同义。在不特别区分的情况下,所述动力也与转矩、力同义。
27.动力传递装置16在作为安装于车身的非旋转构件的壳体18内,具备k0离合器20、变矩器22及自动变速器24等。k0离合器20是设置于发动机12与驱动轮14之间的动力传递路径中的发动机12与电动机mg之间的离合器。变矩器22经由k0离合器20与发动机12连结。自动变速器24与变矩器22连结,并夹设于变矩器22与驱动轮14之间的动力传递路径。变矩器22及自动变速器24分别构成发动机12与驱动轮14之间的动力传递路径的一部分。另外,动
力传递装置16具备:与作为自动变速器24的输出旋转构件的变速器输出轴26连结的传动轴28、与传动轴28连结的差动齿轮30以及与差动齿轮30连结的一对驱动轴32等。另外,动力传递装置16具备将发动机12与k0离合器20连结的发动机连结轴34、将k0离合器20与变矩器22连结的电动机连结轴36等。
28.电动机mg在壳体18内以能够传递动力的方式连结于电动机连结轴36。电动机mg以能够传递动力的方式连结于发动机12与驱动轮14之间的动力传递路径,特别是k0离合器20与变矩器22之间的动力传递路径。也就是说,电动机mg不经由k0离合器20而以能够传递动力的方式连结于变矩器22、自动变速器24。换种看法,变矩器22及自动变速器24分别构成电动机mg与驱动轮14之间的动力传递路径的一部分。变矩器22及自动变速器24分别向驱动轮14传递来自发动机12及电动机mg这些驱动力源中的每一个的驱动力。
29.变矩器22具备与电动机连结轴36连结的泵叶轮22a及与作为自动变速器24的输入旋转构件的变速器输入轴38连结的涡轮叶轮22b。泵叶轮22a经由k0离合器20与发动机12连结,并且直接与电动机mg连结。泵叶轮22a是变矩器22的输入构件,涡轮叶轮22b是变矩器22的输出构件。电动机连结轴36也是变矩器22的输入旋转构件。变速器输入轴38也是与涡轮轴一体地形成的变矩器22的输出旋转构件,所述涡轮轴由涡轮叶轮22b旋转驱动。变矩器22是经由流体向变速器输入轴38传递来自驱动力源(发动机12、电动机mg)中的每一个的驱动力的流体式传动装置。变矩器22具备将泵叶轮22a与涡轮叶轮22b连结的lu离合器40。lu离合器40是将变矩器22的输入输出旋转构件连结的直接连结离合器即公知的锁止离合器。
30.lu离合器40通过利用从设置于车辆10的液压控制回路56供给的调压后的lu液压prlu,使作为lu离合器40的转矩容量的lu离合器转矩tlu变化,从而切换工作状态即控制状态。作为lu离合器40的控制状态,有作为lu离合器40被释放的状态的完全释放状态、作为lu离合器40伴随着滑动而卡合的状态的滑移状态以及作为lu离合器40卡合的状态的完全卡合状态。通过将lu离合器40设为完全释放状态,从而变矩器22设为能够得到转矩放大作用的变矩器状态。另外,通过将lu离合器40设为完全卡合状态,从而变矩器22设为使泵叶轮22a及涡轮叶轮22b一体旋转的锁止状态。
31.自动变速器24例如是具备未图示的一组或多组行星齿轮装置和多个卡合装置cb的公知的行星齿轮式的自动变速器。卡合装置cb例如是由利用液压致动器推压的多板式或单板式的离合器、制动器、利用液压致动器拉紧的带制动器等构成的液压式的摩擦卡合装置。卡合装置cb分别通过利用从液压控制回路56供给的调压后的cb液压prcb,使作为各自的转矩容量的cb转矩tcb变化,从而切换卡合状态、释放状态等控制状态。
32.自动变速器24是通过卡合装置cb中的任意的卡合装置卡合,从而形成变速比(也称为齿轮齿数比)γat(=at输入转速ni/at输出转速no)不同的多个变速级(也称为齿轮级)中的任意齿轮级的有级变速器。自动变速器24由后述的电子控制装置90切换根据司机(驾驶员)的加速器操作、车速v等而形成的齿轮级,即选择性地形成多个齿轮级。at输入转速ni是变速器输入轴38的转速,是自动变速器24的输入转速。at输入转速ni也是变矩器22的输出旋转构件的转速,与作为变矩器22的输出转速的涡轮转速nt同值。at输入转速ni能够用涡轮转速nt表示。at输出转速no是变速器输出轴26的转速,是自动变速器24的输出转速。
33.k0离合器20例如是由利用后述的离合器致动器120推压的多板式或单板式的离合
器构成的湿式或干式的摩擦卡合装置。k0离合器20通过由后述的电子控制装置90控制离合器致动器120,从而切换卡合状态、释放状态等控制状态。
34.图2是示出k0离合器20的一例的局部剖视图。在图2中,k0离合器20包括离合器鼓100、离合器毂102、分离板104、摩擦板106、活塞108、复位弹簧110、弹簧支承板112及卡环114。离合器鼓100和离合器毂102设置在相同的轴心cs上。在图2中,示出轴心cs的上半部分的k0离合器20的径向外周部分。轴心cs是发动机连结轴34、电动机连结轴36等的轴心。离合器鼓100例如与发动机连结轴34连结,与发动机连结轴34一体地旋转。离合器毂102例如与电动机连结轴36连结,与电动机连结轴36一体地旋转。分离板104的多块大致圆环板状的外周缘与离合器鼓100的筒部100a的内周面以不能相对旋转的方式嵌合即花键嵌合。摩擦板106夹设于多块分离板104之间,多块大致圆环板状的内周缘与离合器毂102的外周面以不能相对旋转的方式嵌合即花键嵌合。活塞108在外周缘设置有在分离板104及摩擦板106的方向上延伸的推压部108a。复位弹簧110夹设于活塞108与弹簧支承板112之间,以使活塞108的一部分与离合器鼓100的底板部100b抵接的方式施力。也就是说,复位弹簧110作为以将分离板104和摩擦板106设为非卡合侧的方式对活塞108施力的弹簧元件发挥功能。卡环114在与活塞108的推压部108a之间夹着分离板104及摩擦板106的位置固定于离合器鼓100的筒部100a。在k0离合器20中,在活塞108与离合器鼓100的底板部100b之间形成有油室116。在离合器鼓100上形成有通往油室116的油路118。在k0离合器20中,利用离合器鼓100、活塞108、复位弹簧110、弹簧支承板112、油室116等构成作为液压致动器的离合器致动器120。
35.在这样构成的k0离合器20中,当从液压控制回路56通过油路118向油室116供给调压后的k0液压prk0时,利用k0液压prk0,活塞108抵抗复位弹簧110的作用力,向分离板104及摩擦板106的方向移动,活塞108的推压部108a推压分离板104及摩擦板106。当推压分离板104及摩擦板106时,k0离合器20向卡合状态切换。k0离合器20通过利用k0液压prk0使作为k0离合器20的转矩容量的k0转矩tk0变化,从而切换控制状态。
36.k0转矩tk0例如由摩擦板106的摩擦材料的摩擦系数或k0液压prk0等决定。在k0离合器20中,在油室116中填充有工作油oil,当利用对抗复位弹簧110的作用力的活塞108的推压力(=prk0
×
活塞受压面积)设为分离板104与摩擦板106之间的间隙被堵塞的状态时,使所谓的装配堵塞完成。k0离合器20通过从装配堵塞完成的状态起使k0液压prk0进一步增大,从而产生k0转矩tk0。也就是说,k0离合器20的装配堵塞完成的状态是如果从该状态起使k0液压prk0增大则k0离合器20开始具有转矩容量的状态。用于k0离合器20的装配堵塞的k0液压prk0是用于设为活塞108到达行程末端且没有产生k0转矩tk0的状态的k0液压prk0。
37.返回到图1,在k0离合器20的卡合状态下,经由发动机连结轴34使泵叶轮22a和发动机12一体地旋转。即,k0离合器20通过卡合,从而将发动机12和驱动轮14以能够传递动力的方式连结。另一方面,在k0离合器20的释放状态下,切断发动机12与泵叶轮22a之间的动力传递。即,k0离合器20通过释放,从而切断发动机12与驱动轮14之间的连结。由于电动机mg与泵叶轮22a连结,所以k0离合器20作为设置于发动机12与电动机mg之间的动力传递路径并使该动力传递路径断开连接的离合器,即,将发动机12与电动机mg断开连接的离合器发挥功能。也就是说,k0离合器20是通过卡合而将发动机12与电动机mg连结,另一方面,通过释放而切断发动机12与电动机mg之间的连结的断开连接用离合器。
38.在动力传递装置16中,从发动机12输出的动力在k0离合器20卡合的情况下,从发动机连结轴34依次经由k0离合器20、电动机连结轴36、变矩器22、自动变速器24、传动轴28、差动齿轮30及驱动轴32等向驱动轮14传递。另外,从电动机mg输出的动力不论k0离合器20的控制状态如何均从电动机连结轴36依次经由变矩器22、自动变速器24、传动轴28、差动齿轮30及驱动轴32等向驱动轮14传递。
39.车辆10具备作为机械式的油泵的mop58、作为电动式的油泵的eop60及泵用马达62等。mop58与泵叶轮22a连结,利用驱动力源(发动机12、电动机mg)使之旋转驱动并排出在动力传递装置16中使用的工作油oil。泵用马达62是用于旋转驱动eop60的eop60专用的马达。利用泵用马达62使eop60旋转驱动并排出工作油oil。向液压控制回路56供给mop58或eop60排出的工作油oil。液压控制回路56供给以mop58和/或eop60排出的工作油oil为基础分别进行调压而得到的cb液压prcb、k0液压prk0、lu液压prlu等。
40.车辆10还具备电子控制装置90,所述电子控制装置90包括与发动机12的起动控制等关联的车辆10的控制装置。电子控制装置90例如包括具备cpu、ram、rom、输入输出接口等的所谓的微型计算机而构成,cpu通过利用ram的临时存储功能并按照预先存储于rom的程序进行信号处理,从而执行车辆10的各种控制。电子控制装置90根据需要包括发动机控制用、电动机控制用、液压控制用等的各计算机而构成。
41.向电子控制装置90分别供给基于设置于车辆10的各种传感器等(例如发动机转速传感器70、涡轮转速传感器72、输出转速传感器74、mg转速传感器76、加速器开度传感器78、节气门开度传感器80、制动器开关82、电池传感器84、油温传感器86等)的检测值的各种信号等(例如作为发动机12的转速的发动机转速ne、与at输入转速ni同值的涡轮转速nt、与车速v对应的at输出转速no、作为电动机mg的转速的mg转速nm、作为表示驾驶员的加速操作的大小的驾驶员的加速器操作量的加速器开度θacc、作为电子节气门的开度的节气门开度θth、作为示出用于使车轮制动器工作的制动器踏板由司机操作的状态的信号的制动器接通信号bon、电池54的电池温度thbat或电池充放电电流ibat或电池电压vbat、作为液压控制回路56内的工作油oil的温度的工作油温thoil等)。
42.从电子控制装置90向设置于车辆10的各装置(例如发动机控制装置50、逆变器52、液压控制回路56、泵用马达62等)分别输出各种指令信号(例如用于控制发动机12的发动机控制指令信号se、用于控制电动机mg的mg控制指令信号sm、用于控制卡合装置cb的cb液压控制指令信号scb、用于控制k0离合器20的k0液压控制指令信号sk0、用于控制lu离合器40的lu液压控制指令信号slu、用于控制eop60的eop控制指令信号seop等)。
43.为了实现车辆10中的各种控制,电子控制装置90具备混合动力控制机构即混合动力控制部92、离合器控制机构即离合器控制部94、以及变速控制机构即变速控制部96。
44.混合动力控制部92包括作为控制发动机12的工作的发动机控制机构即发动机控制部92a的功能、作为经由逆变器52控制电动机mg的工作的电动机控制机构即电动机控制部92b的功能,利用这些控制功能执行发动机12及电动机mg的混合动力驱动控制等。
45.混合动力控制部92例如通过将加速器开度θacc及车速v应用于驱动要求量映射,从而算出司机对车辆10的驱动要求量。所述驱动要求量映射是预先通过实验或设计而求出并存储的关系即预先确定的关系。所述驱动要求量例如是驱动轮14中的要求驱动转矩trdem。换种看法,要求驱动转矩trdem[nm]是此时的车速v下的要求驱动功率prdem[w]。作
为所述驱动要求量,也能够使用驱动轮14中的要求驱动力frdem[n]、变速器输出轴26中的要求at输出转矩等。在所述驱动要求量的计算中,也可以使用at输出转速no等代替车速v。
[0046]
混合动力控制部92考虑传递损失、辅机负荷、自动变速器24的变速比γat、电池54的可充电电力win或可放电电力wout等,以实现要求驱动功率prdem的方式输出控制发动机12的发动机控制指令信号se、控制电动机mg的mg控制指令信号sm。发动机控制指令信号se例如是输出此时的发动机转速ne下的发动机转矩te的发动机12的功率即发动机功率pe的指令值。mg控制指令信号sm例如是输出此时的mg转速nm下的mg转矩tm的电动机mg的消耗电力wm的指令值。
[0047]
电池54的可充电电力win是规定电池54的输入电力的限制的能够输入的最大电力,示出电池54的输入限制。电池54的可放电电力wout是规定电池54的输出电力的限制的能够输出的最大电力,示出电池54的输出限制。电池54的可充电电力win或可放电电力wout例如利用电子控制装置90基于电池温度thbat及电池54的充电状态值soc[%]算出。电池54的充电状态值soc是示出电池54的充电状态的值,例如利用电子控制装置90基于电池充放电电流ibat及电池电压vbat等算出。
[0048]
混合动力控制部92在能够仅用电动机mg的输出负担要求驱动转矩trdem的情况下,将行驶模式设为马达行驶(=ev行驶)模式。混合动力控制部92在ev行驶模式下进行在k0离合器20的释放状态下仅将电动机mg作为驱动力源来行驶的ev行驶。另一方面,混合动力控制部92在至少不使用发动机12的输出时不能负担要求驱动转矩trdem的情况下,将行驶模式设为发动机行驶模式即混合动力行驶(=hv行驶)模式。混合动力控制部92在hv行驶模式下进行在k0离合器20的卡合状态下至少将发动机12作为驱动力源来行驶的发动机行驶即hv行驶。另一方面,即使在能够仅用电动机mg的输出负担要求驱动转矩trdem的情况下,在电池54的充电状态值soc小于预先确定的发动机起动阈值或需要发动机12等的预热等情况下,混合动力控制部92也使hv行驶模式成立。所述发动机起动阈值是用于判断是需要强制地起动发动机12并对电池54进行充电的充电状态值soc的预先确定的阈值。这样,混合动力控制部92基于要求驱动转矩trdem等,在hv行驶期间使发动机12自动停止或在该发动机停止后使发动机12再起动或在ev行驶期间起动发动机12,从而切换ev行驶模式和hv行驶模式。
[0049]
混合动力控制部92还包括作为发动机起动判定机构即发动机起动判定部92c的功能、以及作为起动控制机构即起动控制部92d的功能。
[0050]
发动机起动判定部92c判定发动机12的起动要求的有无。例如,发动机起动判定部92c在ev行驶模式时,基于要求驱动转矩trdem是否比能够仅用电动机mg的输出负担的范围大,或者是否需要发动机12等的预热,或者电池54的充电状态值soc是否小于所述发动机起动阈值等,判定是否有发动机12的起动要求。另外,发动机起动判定部92c判定发动机12的起动控制是否完成。
[0051]
离合器控制部94控制k0离合器20以执行发动机12的起动控制。例如,离合器控制部94在利用发动机起动判定部92c判定为有发动机12的起动要求的情况下,向液压控制回路56输出k0液压控制指令信号sk0以得到k0转矩tk0,所述k0转矩tk0用于向发动机12侧传递作为提高发动机转速ne的转矩的、发动机12的起转所需的转矩,所述k0液压控制指令信号sk0用于将释放状态下的k0离合器20向卡合状态控制。也就是说,离合器控制部94在发动
机12起动时,向液压控制回路56输出用于控制离合器致动器120的k0液压控制指令信号sk0,以便从释放状态向卡合状态切换k0离合器20的控制状态。在本实施例中,将发动机12的起转所需的转矩称为必要起转转矩tcrn。
[0052]
起动控制部92d控制发动机12及电动机mg以执行发动机12的起动控制。例如,起动控制部92d在利用发动机起动判定部92c判定为有发动机12的起动要求的情况下,与利用离合器控制部94进行的k0离合器20向卡合状态的切换相匹配地,向逆变器52输出用于电动机mg输出必要起转转矩tcrn的mg控制指令信号sm。也就是说,起动控制部92d在发动机12起动时,向逆变器52输出用于控制电动机mg的mg控制指令信号sm,以使电动机mg输出必要起转转矩tcrn。
[0053]
另外,起动控制部92d在利用发动机起动判定部92c判定为有发动机12的起动要求的情况下,与利用k0离合器20及电动机mg进行的发动机12的起转连动地,向发动机控制装置50输出用于开始燃料供给或发动机点火等的发动机控制指令信号se。也就是说,起动控制部92d在发动机12起动时,向发动机控制装置50输出用于控制发动机12的发动机控制指令信号se,以使发动机12开始运转。
[0054]
在发动机12起转时,产生起转反作用力转矩trfcr,所述起转反作用力转矩trfcr是伴随着k0离合器20的卡合的反作用力转矩。该起转反作用力转矩trfcr在ev行驶时产生由发动机起动期间的惯量导致的车辆10的拉入感,即驱动转矩tr的下降。因此,在使发动机12起动时电动机mg输出的必要起转转矩tcrn也是用于抵消起转反作用力转矩trfcr的mg转矩tm。也就是说,必要起转转矩tcrn是发动机12的起转所需的k0转矩tk0,相当于从电动机mg侧经由k0离合器20向发动机12侧传递的mg转矩tm。必要起转转矩tcrn例如是基于发动机12的规格等预先确定的例如恒定的起转转矩tcr。
[0055]
起动控制部92d在ev行驶期间的发动机12起动时,在ev行驶用的mg转矩tm即产生驱动转矩tr的mg转矩tm的基础之上,还从电动机mg输出与必要起转转矩tcrn的量对应的mg转矩tm。因此,在ev行驶期间,预备发动机12的起动而需要预先确保必要起转转矩tcrn的量。因此,能够仅用电动机mg的输出负担要求驱动转矩trdem的范围成为相对于电动机mg能够输出的最大转矩减去必要起转转矩tcrn的量而得到的转矩范围。电动机mg能够输出的最大转矩是利用电池54的可放电电力wout能够输出的最大的mg转矩tm。
[0056]
变速控制部96例如使用作为预先确定的关系的变速映射进行自动变速器24的变速判断,根据需要向液压控制回路56输出用于执行自动变速器24的变速控制的cb液压控制指令信号scb。所述变速映射例如是在以车速v及要求驱动转矩trdem为变量的二维坐标上具有用于判断自动变速器24的变速的变速线的预定的关系。在所述变速映射中,可以使用at输出转速no等来代替车速v,另外,也可以使用要求驱动力frdem、加速器开度θacc或节气门开度θth等来代替要求驱动转矩trdem。
[0057]
在此,为了在发动机12起动时高精度地控制k0离合器20的控制状态,在电子控制装置90中预先确定有作为第一阶段定义的内部控制用阶段定义dphin,所述内部控制用阶段定义dphin为了离合器致动器120的控制而定义了按照在发动机12的起动过程中被切换的k0离合器20的每个控制状态划分出的多个行进阶段即阶段。
[0058]
图3是说明内部控制用阶段定义dphin中的各阶段的图表。在图3中,内部控制用阶段定义dphin定义有“k0等待”、“快速应用(quick apply)”、“装配堵塞时恒压等待”、“k0起
转”、“快速排油(quick drain)”、“再卡合前恒压等待”、“旋转同步初期”、“旋转同步中期”、“旋转同步终期”、“卡合转移递变(sweep)”、“完全卡合转移递变”、“完全卡合”、“后备递变(backup sweep)”、“算出停止”等阶段。
[0059]
当在开始发动机12的起动控制时有k0等待判定的情况下转变为“k0等待”阶段。“k0等待”阶段是在发动机12的起动控制时不使k0离合器20的控制开始而使其等待的阶段。
[0060]
当在开始发动机12的起动控制时没有k0等待判定的情况下转变为“快速应用”阶段。或者,在k0离合器20的控制开始的等待期间k0等待判定被撤销的情况下,从“k0等待”阶段转变为“快速应用”阶段。“快速应用”阶段是为了迅速地完成k0离合器20的装配堵塞而执行暂时施加较高的k0液压prk0的指令值的快速应用,并使k0液压prk0的初期响应性提高的阶段。k0液压prk0的指令值是输出调压后的k0液压prk0的、针对液压控制回路56内的k0离合器20用的电磁阀的k0液压控制指令信号sk0。
[0061]
在快速应用完成的情况下从“快速应用”阶段转变为“装配堵塞时恒压等待”阶段。“装配堵塞时恒压等待”阶段是为了使k0离合器20的装配堵塞完成而以恒压等待的阶段。
[0062]
在k0离合器20的装配堵塞完成的情况下从“装配堵塞时恒压等待”阶段转变为“k0起转”阶段。“k0起转”阶段是进行利用k0离合器20的发动机12的起转的阶段。
[0063]
在发动机12的起转完成且有快速排油实施判定的情况下,从“k0起转”阶段转变为“快速排油”阶段。“快速排油”阶段是如下阶段:为了能够在作为接下来的阶段的“再卡合前恒压等待”阶段中迅速地以预定的k0液压prk0例如装配结束恒压等待,执行暂时输出较低的k0液压prk0的指令值的快速排油,使k0液压prk0的初期响应性提高。
[0064]
在发动机12的起转完成且没有快速排油实施判定的情况下,从“k0起转”阶段转变为“再卡合前恒压等待”阶段。或者,在快速排油完成的情况下,从“快速排油”阶段转变为“再卡合前恒压等待”阶段。“再卡合前恒压等待”阶段是为了不成为发动机12的完全燃烧的干扰而以预定的k0转矩tk0等待的阶段。发动机12的完全燃烧例如是在开始发动机12的点火的初次燃烧后发动机12的由燃烧产生的独立旋转稳定的状态。不成为发动机12的完全燃烧的干扰是指不妨碍发动机12的独立旋转。
[0065]
当在来自发动机控制部92a的完全燃烧通知时向“旋转同步终期”阶段的转变条件及向“旋转同步中期”阶段的转变条件均不成立的情况下,从“再卡合前恒压等待”阶段转变为“旋转同步初期”阶段。向“旋转同步终期”阶段的转变条件是k0旋转差δnk0为预先确定的旋转同步终期转移判定旋转差以下这样的条件。k0旋转差δnk0是k0离合器20的转速差(=nm-ne,即发动机转速ne与mg转速nm之差)。向“旋转同步中期”阶段的转变条件是向“旋转同步终期”阶段的转变条件不成立且k0旋转差δnk0为预先确定的旋转同步中期转移判定旋转差以下这样的条件。所述旋转同步中期转移判定旋转差是比所述旋转同步终期转移判定旋转差大的值。“旋转同步初期”阶段是如下阶段:为了使发动机转速ne与mg转速nm迅速地同步,控制k0转矩tk0来辅助发动机转速ne的上升。此外,发动机控制部92a例如在从发动机转速ne达到预先确定的发动机12的完全燃烧转速的时刻起的经过时间超过预先确定的完全燃烧通知等待时间tmeng时,输出发动机12的完全燃烧通知(参照后述的图6b)。完全燃烧通知等待时间tmeng例如考虑发动机12的排气要件而预先确定。
[0066]
当在来自发动机控制部92a的完全燃烧通知时向“旋转同步中期”阶段的转变条件成立的情况下,从“再卡合前恒压等待”阶段转变为“旋转同步中期”阶段。或者,当在“旋转
同步初期”阶段的执行期间向“旋转同步中期”阶段的转变条件成立的情况下,从“旋转同步初期”阶段转变为“旋转同步中期”阶段。“旋转同步中期”阶段是以发动机12成为适当的超速量(=ne-nm)的方式控制k0转矩tk0的阶段。
[0067]
当在来自发动机控制部92a的完全燃烧通知时向“旋转同步终期”阶段的转变条件成立的情况下,从“再卡合前恒压等待”阶段转变为“旋转同步终期”阶段。或者,当在“旋转同步初期”阶段的执行期间向“旋转同步终期”阶段的转变条件成立的情况下,从“旋转同步初期”阶段转变为“旋转同步终期”阶段。或者,当在“旋转同步中期”阶段的执行期间向“旋转同步终期”阶段的转变条件成立的情况下,从“旋转同步中期”阶段转变为“旋转同步终期”阶段。或者,当在“旋转同步中期”阶段的执行期间且不是自动变速器24的变速控制期间,并且预测为不能进行发动机转速ne与mg转速nm的同步的状态连续地成立了强制旋转同步转移判定时间以上的情况下,从“旋转同步中期”阶段转变为“旋转同步终期”阶段。是否能够进行发动机转速ne与mg转速nm的同步的预测例如基于k0旋转差δnk0、发动机转速ne的变化梯度及mg转速nm的变化梯度进行判断。“旋转同步终期”阶段是控制k0转矩tk0来使发动机转速ne与mg转速nm同步的阶段。
[0068]
当在“旋转同步终期”阶段的执行期间旋转同步判定成立的情况下,从“旋转同步终期”阶段转变为“卡合转移递变”阶段。所述旋转同步判定是k0旋转差δnk0的绝对值为预先确定的旋转同步判定旋转差以下的判定连续了预先确定的旋转同步判定次数以上的判定。“卡合转移递变”阶段是使k0转矩tk0逐渐增加并将k0离合器20设为卡合状态的阶段。
[0069]
当在“卡合转移递变”阶段的执行期间k0卡合判定成立的情况下,从“卡合转移递变”阶段转变为“完全卡合转移递变”阶段。所述k0卡合判定是k0旋转差δnk0的绝对值为预先确定的完全卡合转移递变判定旋转差以下的判定连续了预先确定的完全卡合转移递变转移判定次数以上的判定。或者,当在“卡合转移递变”阶段的执行期间不能维持k0旋转同步状态的情况下,从“卡合转移递变”阶段转变为“完全卡合转移递变”阶段。不能维持所述k0旋转同步状态的情况是指k0旋转差δnk0的绝对值超过所述完全卡合转移递变判定旋转差加上预先确定的强制卡合转移判定旋转差而得到的值的判定连续地成立了预先确定的旋转背离完全卡合转移递变转移判定次数以上的情况。或者,在判定为从“卡合转移递变”阶段开始起的经过时间超过预先确定的强制卡合转移判定时间,且k0旋转差δnk0的绝对值为预先确定的完全卡合转移递变强制转移判定旋转差以上的情况下,从“卡合转移递变”阶段转变到“完全卡合转移递变”阶段。“完全卡合转移递变”阶段是使k0转矩tk0逐渐增加并将k0离合器20设为完全卡合状态的阶段。将k0离合器20设为完全卡合状态例如是指将k0转矩tk0提高到增加了形成k0离合器20的卡合保障的安全率的状态。
[0070]
当在“完全卡合转移递变”阶段的执行期间完全卡合判定成立的情况下,从“完全卡合转移递变”阶段转变为“完全卡合”阶段。所述完全卡合判定是k0转矩tk0为必要k0转矩tk0n乘以预先确定的安全率(》1)而得到的值以上的判定连续了预先确定的完全同步判定次数以上的判定。必要k0转矩tk0n是k0离合器20的完全卡合所需的k0转矩tk0,例如选择发动机转矩te、mg转矩tm及最小完全卡合保证转矩中的最大值。所述最小完全卡合保证转矩是预先确定的在完全卡合时最低限度所需的k0转矩tk0。或者,在判定为从“完全卡合转移递变”阶段开始起的经过时间成为预先确定的强制完全卡合转移判定时间以上,且k0旋转差δnk0的绝对值为预先确定的完全卡合强制转移判定旋转差以上的情况下,从“完全卡合
转移递变”阶段转变为“完全卡合”阶段。“完全卡合”阶段是维持k0离合器20的完全卡合状态的阶段。
[0071]
也从“后备递变”阶段转变为“完全卡合”阶段。当在“后备递变”阶段的执行期间,所述完全卡合判定成立且k0旋转差δnk0的绝对值为预先确定的后备时旋转同步判定旋转差以下的判定连续地成立了预先确定的后备时旋转同步判定次数以上的情况下,从“后备递变”阶段转变为“完全卡合”阶段。或者,当在“后备递变”阶段的执行期间,判定为在发动机12的起动控制开始后转变为“k0等待”阶段以外的阶段起的经过时间成为预先确定的发动机起动控制超时时间以上,且k0旋转差δnk0的绝对值为所述完全卡合强制转移判定旋转差以上的情况下,从“后备递变”阶段转变为“完全卡合”阶段。
[0072]
例如在“k0起转”阶段、“再卡合前恒压等待”阶段、“旋转同步初期”阶段、“旋转同步中期”阶段及“旋转同步终期”阶段这些各阶段中的任意阶段的执行期间,为了防止控制堆叠,在判定为从执行期间的阶段开始起的经过时间超过预先确定的执行期间的阶段用的后备转移判定时间,且k0旋转差δnk0为预先确定的执行期间的阶段用的后备转移判定旋转差以上的情况下,从执行期间的阶段转变为“后备递变”阶段。“后备递变”阶段是进行使k0转矩tk0逐渐增加并将k0离合器20卡合的后备控制的阶段。
[0073]“算出停止”阶段是在发动机12起动时正在执行失效保护控制(fail-safe control)的期间停止在发动机12的起动控制中使用的k0液压prk0的基础校正压力或要求k0转矩tk0d的计算的阶段。所述失效保护控制例如是如下控制:在发生不从液压控制回路56内的k0离合器20用的电磁阀输出调压后的k0液压prk0的失效时,切换液压控制回路56内的油路以便在不经由k0离合器20用的电磁阀的情况下向离合器致动器120供给能够维持k0离合器20的完全卡合状态的k0液压prk0。能够维持完全卡合状态的k0液压prk0例如是向k0离合器20用的电磁阀等供给的管路压力等原压。所述基础校正压力是基于工作油温thoil等对在发动机12的起动控制中使用的k0液压prk0的基础压力进行校正而得到的值。能够基于k0液压prk0的基础校正压力,例如要求向k0离合器20供给的液压。要求k0转矩tk0d是在发动机12的起动控制时为了发动机12的起转或向卡合状态切换k0离合器20而要求的k0转矩tk0。
[0074]
离合器控制部94在发动机12起动时,基于内部控制用阶段定义dphin,控制离合器致动器120以将k0离合器20的控制状态从释放状态向卡合状态切换。
[0075]
另外,起动控制部92d在发动机12起动时,与k0离合器20的控制状态相匹配地控制电动机mg及发动机12。在发动机12起动时,可考虑使起动控制部92d基于内部控制用阶段定义dphin,控制电动机mg及发动机12。然而,在发动机12的起动控制中,控制电动机mg以使电动机mg输出必要起转转矩tcrn即可,另外,控制发动机12以使发动机12开始运转即可。因此,当使用对k0离合器20的控制状态精细地划分并定义的内部控制用阶段定义dphin来控制电动机mg及发动机12时,发动机起动时的控制有可能会变得复杂。
[0076]
因此,为了在发动机12起动时实现控制的简化,在电子控制装置90中预先确定有作为第二阶段定义的外部公开用阶段定义dphout,所述外部公开用阶段定义dphout为了电动机mg及发动机12的控制而定义了按照在发动机12的起动过程中被切换的k0离合器20的每个控制状态划分出的多个阶段。这样,在电子控制装置90中,为了管理k0离合器20的控制状态,预先确定有内部控制用阶段定义dphin和外部公开用阶段定义dphout这2种阶段定
义。
[0077]
例如以算出用于发动机12的起动控制的k0液压prk0的基础校正压力、要求k0转矩tk0d为目的而制作了内部控制用阶段定义dphin。因此,如图6a和图6b所示,关于“后备递变”阶段和“算出停止”阶段以外的、内部控制用阶段定义dphin的阶段,阶段间的转变的定时基于k0液压prk0的基础校正压力和要求k0转矩tk0d中的至少一方变化的定时来定义。内部控制用阶段定义dphin基于想要控制k0液压prk0、k0转矩tk0这样的针对k0离合器20的控制的要求状态来定义各阶段。也就是说,基于对k0离合器20的控制状态进行切换的控制要求来定义内部控制用阶段定义dphin。
[0078]
以对作为对于离合器控制部94而言的“外部”的混合动力控制部92的控制且不使用内部控制用阶段定义dphin的控制公开(发送)k0离合器20的控制状态为目的而制作了外部公开用阶段定义dphout。因此,如图4、图6a及图6b所示,关于“后备递变”阶段和“算出停止”阶段以外的外部公开用阶段定义dphout的阶段,阶段间的转变的定时基于要求k0转矩tk0d变化的定时、k0离合器20的控制是否开始以及发动机12与电动机mg的转速之差是否满足预定的条件中的任一方来定义。外部公开用阶段定义dphout基于控制k0离合器20这样的针对k0离合器20的控制的执行状态来定义各阶段。也就是说,基于执行k0离合器20的控制时的k0离合器20的控制状态来定义外部公开用阶段定义dphout。
[0079]
图4是说明外部公开用阶段定义dphout中的各阶段的图表。在图4中,外部公开用阶段定义dphout定义有“k0等待”、“装配堵塞过渡”、“起转”、“完全燃烧判定等待”、“旋转同步过渡”、“完全卡合过渡”、“完全卡合”、“后备卡合”、“失效保护”等阶段。
[0080]
外部公开用阶段定义dphout中的“k0等待”阶段是与内部控制用阶段定义dphin中的“k0等待”阶段对应的阶段。外部公开用阶段定义dphout中的“k0等待”阶段是表示在发动机12的起动控制时不开始k0离合器20的控制而等待的状态的阶段。
[0081]“装配堵塞过渡”阶段是与内部控制用阶段定义dphin中的“快速应用”阶段及“装配堵塞时恒压等待”阶段对应的阶段。“装配堵塞过渡”阶段是表示k0离合器20的装配堵塞控制期间的阶段。也就是说,“装配堵塞过渡”阶段是在开始k0离合器20的控制时从“k0等待”阶段转变的阶段。
[0082]“起转”阶段是与内部控制用阶段定义dphin中的“k0起转”阶段对应的阶段。“起转”阶段是表示基于k0离合器20的发动机12的起转期间的阶段。
[0083]“完全燃烧判定等待”阶段是与内部控制用阶段定义dphin中的“快速排油”阶段及“再卡合前恒压等待”阶段对应的阶段。“完全燃烧判定等待”阶段是表示使k0转矩tk0降低而等待发动机12的完全燃烧的状态的阶段。
[0084]“旋转同步过渡”阶段是与内部控制用阶段定义dphin中的“旋转同步初期”阶段、“旋转同步中期”阶段、“旋转同步终期”阶段及“卡合转移递变”阶段对应的阶段。“旋转同步过渡”阶段是表示发动机12与电动机mg的旋转同步控制期间的阶段。
[0085]“完全卡合过渡”阶段是与内部控制用阶段定义dphin中的“完全卡合转移递变”阶段对应的阶段。“完全卡合过渡”阶段是表示使k0离合器20成为完全卡合状态的控制期间的阶段。
[0086]
外部公开用阶段定义dphout中的“完全卡合”阶段是与内部控制用阶段定义dphin中的“完全卡合”阶段对应的阶段。外部公开用阶段定义dphout中的“完全卡合”阶段是表示
将k0离合器20维持为完全卡合状态的状态的阶段。
[0087]“后备卡合”阶段是与内部控制用阶段定义dphin中的“后备递变”阶段对应的阶段。“后备卡合”阶段是表示将k0离合器20卡合的后备控制期间的阶段。
[0088]“失效保护”阶段是与内部控制用阶段定义dphin中的“算出停止”阶段对应的阶段。“失效保护”阶段是表示正在执行失效保护控制的状态的阶段。
[0089]
起动控制部92d在发动机12起动时,基于外部公开用阶段定义dphout,控制电动机mg以使电动机mg输出必要起转转矩tcrn,控制发动机12以使发动机12开始运转。
[0090]
如上所述,内部控制用阶段定义dphin与外部公开用阶段定义dphout相比更精细地划分k0离合器20的控制状态。例如,内部控制用阶段定义dphin具有包括基于电动机mg与发动机12的旋转同步过程中的k0离合器20的控制状态而被定义的“旋转同步初期”、“旋转同步中期”及“旋转同步终期”这些各阶段在内的多个阶段。另外,外部公开用阶段定义dphout具有基于电动机mg与发动机12的旋转同步过程中的k0离合器20的控制状态而被定义的内部控制用阶段定义dphin中的“旋转同步初期”、“旋转同步中期”及“旋转同步终期”这些各阶段被整合为一个的阶段即“旋转同步过渡”阶段。
[0091]
图5是说明电子控制装置90的控制工作的主要部分的流程图,且是说明用于实现兼顾发动机起动时的控制精度的提高和控制的简化的控制工作的流程图,例如被反复执行。图6a和图6b是示出执行了图5的流程图所示的控制工作的情况下的时序图的一例的图。
[0092]
在图5中,首先,在与发动机起动判定部92c的功能对应的步骤(以下省略步骤)s10中,判定是否有发动机12的起动要求。在该s10的判断为否定的情况下,结束本例程。在该s10的判断为肯定的情况下,在与离合器控制部94及起动控制部92d的功能对应的s20中,基于内部控制用阶段定义dphin来控制离合器致动器120,并且基于外部公开用阶段定义dphout来控制电动机mg及发动机12。接着,在与发动机起动判定部92c的功能对应的s30中,判定发动机12的起动控制是否完成。在该s30的判断为否定的情况下,执行上述s20。在该s30的判断为肯定的情况下,结束本例程。此外,在发动机12的起动控制的过渡期间执行自动变速器24的变速控制的情况下,例如利用变速控制部96基于内部控制用阶段定义dphin执行自动变速器24的变速控制。另外,在发动机12的起动控制的过渡期间,基本上lu离合器40的控制状态设为完全释放状态或滑移状态。
[0093]
图6a和图6b示出执行发动机12的起动控制的情况下的一例。在图6a中,“k0控制阶段”示出内部控制用阶段定义dphin中的各阶段的转变状态。另外,将要求k0转矩tk0d换算为k0液压prk0而得到的液压值加上k0液压prk0的基础校正压力而得到的合计液压值作为k0液压prk0的指令值输出。t1时刻示出在怠速状态下停车的ev行驶模式时或ev行驶期间,进行发动机12的起动要求并开始发动机12的起动控制的时刻。在发动机12的起动控制开始后,执行“k0等待”阶段(参照t1时刻-t2时刻)、“快速应用”阶段(参照t2时刻-t3时刻)、“装配堵塞时恒压等待”阶段(参照t3时刻-t4时刻)。继k0离合器20的装配堵塞控制之后,执行“k0起转”阶段(参照t4时刻-t5时刻)。在图6a和图6b的实施方式中,在“装配堵塞时恒压等待”阶段中,施加与在“k0起转”阶段要求的必要起转转矩tcrn相当的k0液压prk0。在“装配堵塞时恒压等待”阶段中,实际的k0液压prk0没有上升到产生k0转矩tk0的值以上。在“k0起转”阶段中,实际的k0液压prk0上升到产生k0转矩tk0的值以上。在“k0起转”阶段中,从电动机mg输出与要求k0转矩tk0d即必要起转转矩tcrn相当的大小的mg转矩tm。在“k0起转”阶段
中,当提高发动机转速ne时,开始发动机点火等而使发动机12初次燃烧。此外,在进行点火起动的情况下,例如与发动机转速ne的提高开始大致同时地使发动机12初次燃烧。在发动机12的初次燃烧后,为了不成为发动机12的完全燃烧的干扰,继“k0起转”阶段之后,执行“快速排油”阶段(参照t5时刻-t6时刻)、“再卡合前恒压等待”阶段(参照t6时刻-t7时刻),暂时输出较低的k0液压prk0的指令值。当从发动机控制部92a输出发动机完全燃烧通知时(参照t7时刻),执行“旋转同步初期”阶段(参照t7时刻-t8时刻)、“旋转同步中期”阶段(参照t8时刻-t9时刻)、“旋转同步终期”阶段(参照t9时刻-t10时刻)、“卡合转移递变(图6a中的“卡合转移sw”)”阶段(参照t10时刻-t11时刻),进行发动机12与电动机mg的旋转同步控制。继“卡合转移递变”阶段之后,执行“完全卡合转移递变(图6a中的“完全卡合转移sw”)”阶段(参照t11时刻-t12时刻),使k0转矩tk0逐渐增加直到增加了形成k0离合器20的卡合保障的安全率的状态。当使k0转矩tk0上升到增加了形成k0离合器20的卡合保障的安全率的状态时,执行“完全卡合”阶段(参照t12时刻-t13时刻),维持k0离合器20的完全卡合状态。t13时刻示出使发动机12的起动控制完成的时刻。
[0094]
如上所述,根据本实施例,在发动机12起动时,基于为了离合器致动器120的控制而被定义的内部控制用阶段定义dphin,控制离合器致动器120以将k0离合器20的控制状态从释放状态向卡合状态切换,基于为了电动机mg及发动机12的控制而被定义的外部公开用阶段定义dphout,控制电动机mg以使电动机mg输出必要起转转矩tcrn,并且控制发动机12以使发动机12开始运转,因此能够与k0离合器20的控制状态相匹配地独立且适当地控制离合器致动器120和电动机mg及发动机12。因此,能够实现兼顾发动机起动时的控制精度的提高和控制的简化。
[0095]
另外,根据本实施例,由于内部控制用阶段定义dphin与外部公开用阶段定义dphout相比更精细地划分k0离合器20的控制状态,因此在发动机12起动时,能够在不使电动机mg及发动机12的控制复杂化的情况下提高离合器致动器120的控制精度,进而能够提高k0离合器20的控制精度。
[0096]
另外,根据本实施例,内部控制用阶段定义dphin具有包括“旋转同步初期”、“旋转同步中期”及“旋转同步终期”这些各阶段在内的多个阶段,外部公开用阶段定义dphout具有内部控制用阶段定义dphin中的“旋转同步初期”、“旋转同步中期”及“旋转同步终期”这些各阶段被整合为一个的阶段即“旋转同步过渡”阶段,因此在发动机12起动时,在电动机mg与发动机12的旋转同步过程中,能够在不使电动机mg及发动机12的控制复杂化的情况下提高离合器致动器120的控制精度,进而能够提高k0离合器20的控制精度。
[0097]
另外,根据本实施例,基于对k0离合器20的控制状态进行切换的控制要求来定义内部控制用阶段定义dphin,因此能够与想要控制的k0离合器20的控制状态相匹配地适当控制离合器致动器120。另外,基于执行k0离合器20的控制时的k0离合器20的控制状态来定义外部公开用阶段定义dphout,因此能够与k0离合器20的实际的控制状态相匹配地适当控制电动机mg及发动机12。
[0098]
另外,根据本实施例,通过基于内部控制用阶段定义dphin或外部公开用阶段定义dphout来参照k0离合器20的控制状态,能够在k0离合器20的卡合过渡期间实施与k0离合器20的卡合控制不同的控制,能够提高能量效率、驾驶性。另外,通过仅公开k0离合器20的控制状态下的必要的信息,从而能够考虑到各计算机间的通信等的负荷。
[0099]
以上,基于附图对本发明的实施例进行了详细说明,但本发明也适用于其他方式。
[0100]
例如,在上述实施例中,作为发动机12的起动方法,例示了与k0离合器20从释放状态向卡合状态切换的过渡状态下的发动机12的起转相匹配地将发动机12点火,在发动机12本身也使发动机转速ne上升的起动方法,但不限于该方案。例如,发动机12的起动方法也可以是如下起动方法等:使发动机12起转直到k0离合器20成为完全卡合状态或接近完全卡合状态的状态后将发动机12点火。此外,在mg转速nm设为零的状态时的车辆10的停止时,能够采用在k0离合器20的完全卡合状态下利用电动机mg使发动机12起转后将发动机12点火的起动方法。或者,在车辆10中具备作为使发动机12起转的专用马达的起动机的情况下,在mg转速nm设为零的状态时的车辆10的停止时,例如在由于外部空气温度为极低温而不能够充分地进行利用电动机mg的起转时,能够采用利用起动机使发动机12起转后将发动机12点火的起动方法。
[0101]
另外,在上述实施例中,作为构成发动机12与驱动轮14之间的动力传递路径的一部分并且将来自驱动力源(发动机12、电动机mg)中的每一个的驱动力向驱动轮14传递的自动变速器24,例示了行星齿轮式的自动变速器,但不限于该方案。自动变速器24也可以是包含公知的dct(dual clutch transmission:双离合自动变速器)的同步啮合型平行双轴式自动变速器、公知的带式无级变速器等。
[0102]
另外,在上述实施例中,使用变矩器22作为流体式传动装置,但不限于该方案。例如,作为流体式传动装置,也可以使用没有转矩放大作用的液力耦合器等其他流体式传动装置来代替变矩器22。或者,并非必须具备流体式传动装置。
[0103]
此外,上述内容仅为一实施方式,本发明能够用基于本领域技术人员的知识施加各种变更、改良的方案来实施。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1