一种座椅调节结构、调节方法及工程机械座椅与流程
1.本发明涉及一种座椅调节结构、调节方法及工程机械座椅,属于工程机械领域。
背景技术:
2.对驾驶员来说,舒适的座椅有助于缓解驾车作业疲劳,提高驾车的舒适性和安全性。其中座椅减振器起到提供刚度及阻尼力的作用,座椅的减振器刚度及阻尼力调整是为了满足不同体重的驾驶员驾驶需要,是驾驶员座椅舒适性调整的主要功能部件。
3.现有一种座椅减振器阻尼力的调节装置(cn201320646645.3),公开了在座椅减振器的内、外连杆之间铰接有可调式阻尼缸,可调式阻尼缸的活塞杆内套装有内杆,内杆上设置有调整阻尼缸内贯通活塞上下腔的阻尼孔大小的阀块,所述的活塞杆端头上装有内杆转动装置,内杆转动装置通过拉线钢丝连接在阻尼调节手柄上,转动阻尼调节手柄通过拉线钢丝来控制阀块对阻尼孔的开度,实现减振器阻尼力的调节。
4.上述方案依次通过阻尼调节手柄、拉线钢丝、摇臂、内杆来调整阻尼器的阻尼孔的开度,进而控制阻尼力的大小,结构简单。但同时存在以下缺点:
5.1)仅能实现阻尼力的手动调节,而座椅的减振性能是由刚度和阻尼力共同决定的,因此,其效果有限。
6.2)不同体重的驾驶员乘坐时,如果使用固定刚度及阻尼力的座椅,则减振舒适性不同,有的体重范围内的驾驶员会觉得不舒适,而司机或操作者一般并不知道阻尼力大小多少是合适,或者阻尼力的最佳范围,调节起来非常盲目。
技术实现要素:
7.针对上述现有技术存在的问题,本发明提供一种座椅调节结构、调节方法及工程机械座椅,通过检测是否存在操作者及检测操作者的体重来自动调节座椅,将座椅的刚度与阻尼力自动调节至预设的最佳值。
8.为了实现上述目的,本发明采用的一种座椅调节结构,包括座椅体,所述座椅体的上端安装有阻尼力单元、下端安装有驾驶室连接板,所述阻尼力单元与驾驶室连接板间安装有电子控制器、座椅体重传感器,阻尼力单元的下部安装有刚度单元和操作者存在指示器,驾驶室连接板的上方安装有座椅减振器;
9.所述操作者存在指示器用于检测是否存在操作者,所述座椅体重传感器用于检测操作者的体重是否在设定范围内,所述电子控制器用于接收操作者存在指示器、座椅体重传感器的检测信号并控制阻尼力单元和刚度单元进行座椅减振器的刚度和阻尼力调节。
10.作为改进,所述刚度单元为带电动充放气泵的空气弹簧,刚度单元接受到电子控制器的信号,自动启动电动气泵充放气以调节座椅的刚度值。
11.作为改进,所述阻尼力单元为可调式阻尼杆和/或阻尼装置。
12.作为改进,所述阻尼力单元为电磁阻尼杆或拉线式阻尼杆,阻尼力单元接受到电子控制器的信号,控制电流大小或收放线长度以调整阻尼力大小。
13.作为改进,所述座椅体重传感器包括变速箱速度传感器、档位传感器和液压主泵转速传感器。
14.另外,本发明还提供了一种所述的座椅调节结构的调节方法,包括:
15.若操作者存在指示器中的至少一个传感器指示操作者存在时,且座椅体重传感器在设定范围内,则电子控制器根据操作者体重自动调整座椅减振器至预先设定的刚度和阻尼力;
16.若操作者存在指示器中的至少一个传感器指示操作者不在时,且座椅体重传感器超出合理设定范围内,则电子控制器调整座椅减振器刚度、阻尼力恢复到初始设定值。
17.作为改进,根据操作者体重自动调整座椅减振器至预先设定的刚度和阻尼力,具体为:
18.在座椅的刚度、阻尼力调节范围内做出若干插值,并进行排列组合;
19.设计doe试验,对上述不同排列组合的刚度、阻尼力按序进行调节并开展驾驶室振动舒适性测试;
20.操作者的体重设定合理范围,并在范围内插值;
21.针对某一特定体重档位,测试选定的可评判操作者振动舒适性的标准,在驾驶室座椅靠背、坐垫及底板布置加速度传感器,以驾驶室综合加权加速度平方根值为响应;
22.测试完毕后,测试结果中的最优值及其预定的临界范围内,存在对应的座椅减振器刚度、阻尼值,即为预先设定值;
23.所述预定的临界范围是最优值的90%大小所对应刚度、阻尼力范围。
24.作为改进,所述操作者存在指示器包括变速箱速度传感器、档位传感器和液压主泵转速传感器;
25.当变速箱速度传感器检测到的变速箱输出速度非零时,指示操作者存在;当档位传感器检测到的档位不处于空挡时,指示操作者存在;当液压主泵转速传感器检测到的液压主泵转速非零时,指示操作者存在;
26.当上述任一传感器指示操作者存在,且当座椅体重传感器检测到操作者的体重处于设定范围内,电子控制器控制座椅减振器的阻尼力单元和刚度单元自动调整至预设设定值;
27.当上述任一传感器指示操作者不在,且座椅体重传感器超出合理设定范围内,电子控制器调整座椅减振器刚度、阻尼力恢复到初始设定值。
28.另外,本发明还提供了一种工程机械座椅,包括座椅主体,所述座椅主体上安装有靠背和坐垫,座椅主体下部安装有所述的座椅调节结构。
29.最后,本发明还提供了一种工程机械,包括工程机械主体,所述工程机械主体上安装有驾驶室,驾驶室内安装有所述的工程机械座椅。
30.与现有技术相比,本发明的有益效果是:
31.(1)有助于缓解驾车疲劳,降低振动带来的身体危害,提高驾车的舒适性和安全性。当不同体重的驾驶员对座椅有不同的减振舒适性要求时,可通过刚度、阻尼力的调节满足驾驶员的要求,或在行车过程中路况发生改变时,可通过刚度、阻尼力的调节,使座椅保持最佳减振性能。
32.(2)能够检测操作者体重及检测是否在车上,自动调节座椅空气弹簧充气率和/或
阻尼大小,使不同体重的车辆驾驶员均能感到舒适。
附图说明
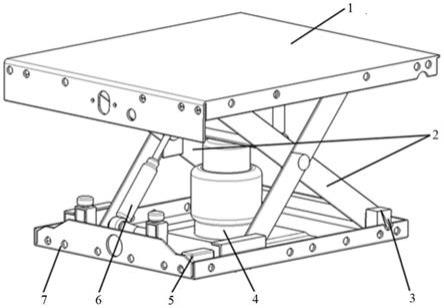
33.图1为本发明的座椅调节结构的示意图一;
34.图2为本发明的座椅调节结构的示意图二;
35.图3为本发明调节方法的流程示意图;
36.图4为本发明座椅减振器刚度和阻尼力的预先设定值确定方法;
37.图5为本发明工程机械座椅的结构示意图;
38.图6为本发明工程机械的结构示意图;
39.图中:1、阻尼力单元,2、电子控制器,3、座椅减振器一,4、座椅体,5、座椅减振器二,6、座椅体重传感器,7、驾驶室连接板,8、刚度单元,9、操作者存在指示器,10、靠背,11、坐垫,12、驾驶室,13、工程机械主体。
具体实施方式
40.为使本发明的目的、技术方案和优点更加清楚明了,下面对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。
41.除非另有定义,本文所使用的所有的技术术语和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同,本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
42.如图1、图2所示,一种座椅调节结构,包括座椅体4,所述座椅体4的上端安装有阻尼力单元1、下端安装有驾驶室连接板7,驾驶室连接板7用于连接驾驶室,所述阻尼力单元1与驾驶室连接板7间安装有电子控制器2、座椅体重传感器6,阻尼力单元1的下部安装有刚度单元8和操作者存在指示器9,驾驶室连接板7的上方安装有座椅减振器一3、座椅减振器二5;
43.所述操作者存在指示器9用于检测是否存在操作者,所述座椅体重传感器6用于检测操作者的体重是否在设定范围内,所述电子控制器2用于接收操作者存在指示器9、座椅体重传感器6的检测信号并控制阻尼力单元1和刚度单元8进行座椅减振器的刚度和阻尼力调节。
44.作为实施例的改进,所述刚度单元8为带电动充放气泵的空气弹簧,刚度单元8接受到电子控制器2的信号,自动启动电动气泵充放气以调节座椅的刚度值。
45.作为实施例的改进,所述阻尼力单元1为可调式阻尼杆和/或阻尼装置;所述阻尼力单元1为电磁阻尼杆或拉线式阻尼杆,阻尼力单元1接受到电子控制器2的信号,控制电流大小或收放线长度以调整阻尼力大小。
46.另外,如图3、图4所示,本发明还提供了一种所述的座椅调节结构的调节方法,包括:
47.若操作者存在指示器9中的至少一个传感器指示操作者存在时,且座椅体重传感器6在设定范围内,则电子控制器2根据操作者体重自动调整座椅减振器至预先设定的刚度和阻尼力;
48.若操作者存在指示器9中的至少一个传感器指示操作者不在时,且座椅体重传感器6超出合理设定范围内,则电子控制器2调整座椅减振器刚度、阻尼力恢复到初始设定值。
49.作为实施例的改进,根据操作者体重自动调整座椅减振器至预先设定的刚度和阻尼力,具体包括以下步骤:
50.在座椅的刚度、阻尼力调节范围内做出若干插值,并按一定方法进行排列组合;
51.设计doe试验,对上述不同排列组合的刚度、阻尼力按序进行调节并开展驾驶室振动舒适性测试;
52.操作者的体重需设定合理范围,并在范围内按一定原则插值,如设定成人操作员范围40kg
‑
150kg,每10kg为一档;
53.针对某一特定体重档位,测试选定的可评判操作者振动舒适性的标准,如iso2631,在驾驶室座椅靠背、坐垫及底板布置加速度传感器,以驾驶室综合加权加速度平方根值为响应;
54.测试完毕后,测试结果中的最优值及其预定的临界范围内,存在对应的座椅减振器刚度、阻尼值,即为预先设定值;
55.所述预定的临界范围是最优值的90%大小所对应刚度、阻尼力范围。
56.针对每一个操作者体重档位,均有对应的预先设定值,集成在座椅的电子控制器2中,在其自动调节时保证最佳的减振效果。座椅刚度和阻尼力的预设值,是根据选定的可评判操作者振动舒适性的标准及本发明方法确定的,具有普适应,并将优化方法得到预先设定值集成到控制程序中,实现智能化,避免调节结果的盲目性。
57.作为实施例的改进,如图4所示,所述操作者存在指示器9包括变速箱速度传感器、档位传感器和液压主泵转速传感器;
58.当变速箱速度传感器检测到的变速箱输出速度非零时,指示操作者存在;当档位传感器检测到的档位不处于空挡时,指示操作者存在;当液压主泵转速传感器检测到的液压主泵转速非零时,指示操作者存在;
59.当上述任一传感器指示操作者存在,且当座椅体重传感器6检测到操作者的体重处于设定范围内,电子控制器12控制阻尼力单元1和刚度单元8自动调整至预设设定值;
60.当上述任一传感器指示操作者不在,且座椅体重传感器6超出合理设定范围内,电子控制器2控制阻尼力单元1和刚度单元8调整座椅减振器的刚度、阻尼力恢复到初始设定值。
61.另外,如图5所示,本发明还提供了一种工程机械座椅,包括座椅主体,所述座椅主体上安装有靠背10和坐垫11,座椅主体下部安装有所述的座椅调节结构。
62.最后,如图6所示,本发明还提供了一种工程机械,包括工程机械主体13,所述工程机械主体13上安装有驾驶室12;及
63.连接到所述工程机械主体13上的电子控制器2;
64.与所述电子控制器2联通的座椅体重传感器;
65.与所述电子控制器2联通的变速箱速度传感器;
66.与所述电子控制器2联通的档位传感器;
67.与所述电子控制器2联通的液压主泵转速传感器;
68.所述电子控制器2具有基于检测操作者体重而自动调节座椅刚度和/或阻尼大小
的座椅调节功能,其中,电子控制器2的型号可以为imct365。
69.本发明有助于缓解驾车疲劳,降低振动带来的身体危害,提高驾车的舒适性和安全性。当不同体重的驾驶员对座椅有不同的减振舒适性要求时,可通过刚度、阻尼力的调节满足驾驶员的要求,或在行车过程中路况发生改变时,可通过刚度、阻尼力的调节,使座椅保持最佳减振性能。
70.本发明能够检测操作者体重及检测是否在车上,自动调节座椅空气弹簧充气率和/或阻尼大小,使不同体重的车辆驾驶员均能感到舒适。
71.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1