基于压电驱动的新型高机动性轮式移动装置及其控制方法
:
1.本发明涉及一种基于压电驱动的新型高机动性轮式移动装置及其控制方法,属于压电驱动技术领域及智能材料与结构领域
背景技术:
2.为了适应复杂的地形环境(包括泥沙表面,起伏山地等),满足当前实际的应用要求(例如狭窄空间内的快速移动等),拓展新能源汽车电驱动技术,具备在复杂表面敏捷操控的轮式移动机器人发展迅速。同时,该轮式移动系统一直在结构设计和驱动方式上积极创新。镂空拓扑结构的车轮设计、高性能的电磁电机的研究等不断使得轮式移动系统朝着轻量化、微型化方向发展。但是,采用电磁电机来驱动车轮始终需要借助减速机构来实现车轮的变速,因此无法完全消除冗余机构实现轻巧化。若能将本身不具备驱动及调速能力车轮装置实现其自身的独立驱动化。这样不仅能避免使用减速机构,大大减小了整个驱动系统的质量和复杂程度,同时也降低了控制系统的复杂程度。而采用压电机电来驱动的车轮可有效的实现上述的目标。通过合理的轮式移动结构的设计,使得整个移动系统具有尺寸小,质量轻、结构简单、抗电磁干扰、在复杂表面环境快速运动的优点,能够在狭窄空间内完成搜索和救援,环境监测等任务。
技术实现要素:
3.针对目前轮式移动系统需要复杂的传动和减速机构使其质量大,结构复杂,难以实现该装置的小型化问题。本发明提出了一种基于压电驱动的新型高机动性轮式移动装置及其控制方法,该装置中所有的压电车轮相互独立且结构相同,单个压电车轮结构包括定子,转子及轮胎。通过对定子采用合适的电压激励信号,可有效的驱动并控制压电车轮的旋转速度,进而最终对轮式移动装置进行运动控制(包括直线运动,转向运动等)。
4.本发明所采用的技术方案有:一种基于压电驱动的新型高机动性轮式移动装置,由两个压电车轮和连接轴组成,两个压电车轮分别为左压电车轮和右压电车轮,所述连接轴两端分别与左压电车轮、右压电车轮的中心部分的端面胶合。
5.进一步地,所述压电车轮包括定子,转子和轮胎,所述定子包括内部为十字形梁结构的圆环金属基体以及粘贴于圆环金属基体内表面中央平台处的压电陶瓷片组成,所述中央平台位于圆环金属基体内表面的四个区域,该四个区域是由于十字形梁结构空间划分导致的,中央平台数量为4个,其上各粘贴有一片压电陶瓷片。
6.进一步地,所述转子为具有开口的金属圆环组成,转子与定子形成空间同心环,并套在定子的外表面。
7.进一步地,所述轮胎的材质为弹性橡胶,并套在转子外表面。
8.本发明还所采用的技术方案有:一种基于压电驱动的新型高机动性轮式移动装置的控制方法,步骤如下:
9.步骤一:施加电激励方式;
10.步骤二:施加电激励方式由a相和b相组成,且a相、b相的相位差为90
°
,所述施加a相激励的压电陶瓷为2片,即第一压电陶瓷片和第二压电陶瓷片,且第一压电陶瓷片和第二压电陶瓷片的空间位置相对,同时极化方向相同;所述施加b相激励的压电陶瓷为2片,即第三压电陶瓷片和第四压电陶瓷片,且第三压电陶瓷片和第四压电陶瓷片的空间位置相对,同时极化方向相同;
11.步骤三:所述a相和b相同频正弦信号之间的相位差为π/2,定子的两个正交工作模态被同时激发出来,使环形定子的外表面上的质点产生椭圆运动,进而在表面产生行波,并将振动通过摩擦环形转子的内表面,推动转子转动,所述工作模态为:3阶的弯振模态,该模态激发环形定子外表面的面外弯曲振动。
12.进一步地,所述转子转动的正、反方向由a、b两相正弦信号的相位差确定,即π/2相位差使车轮正向运动、-π/2相位差使车轮反向运动。
13.进一步地,当对左车轮和右车轮同时施加同频率的电激励时,左、右车轮产生的转速一样,轮胎作用于地面,使得轮式移动装置产生向前或向后的直线运动。
14.进一步地,当对其中任一一个车轮关闭电激励时,相应的车轮将快速停止转动,左右两车轮转速产生差异,以使得轮式移动装置产生向左或向右的转向运动,通过调节电激励的频率实现直线运动的速度调节和转向运动的半径调节。
15.本发明具有如下有益效果:
16.(1).左、右车轮的电激励系统各自独立,可实现左右车轮旋转速度的调控。
17.(2).将定子和转子融入车轮内部的设计方法使得结构简单,降低了装置的质量和尺寸。
18.(3).施加预应力结构的创新:采用弹性橡胶套在具有开口的定子结构可对转子施加并调节预压力,同时橡胶与地面接触可驱动装置运动。
19.(4).工作模态的创新:中央平台上的4片压电陶瓷受电激励激发出了环形面外振动:经有限元计算,其3阶的弯振模态激发定子环形定子外表面的面外弯曲振动,同时产生的振幅较高,提高了转子旋转转速,最高转速可达4000rmin。
附图说明:
20.图1为定子的正视示意图。
21.图2为定子的轴测示意图。
22.图3为转子的正视示意图。
23.图4为转子的轴测示意图。
24.图5为定子、转子及轮胎装配示意图。
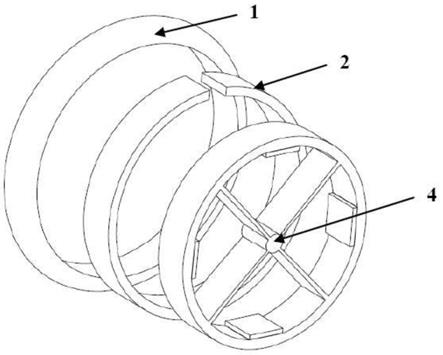
25.图6为本发明整体结构示意图;
26.图7为弹性橡胶对定子施加预应力的示意图;
27.图8为定子a相振动模态仿真示意图;
28.图9为定子b相振动模态仿真示意图。
29.其中:
30.1-轮胎,2-转子,3-轴,4-定子,5-压电陶瓷片,6-十字交叉梁。
具体实施方式:
31.下面结合附图对本发明作进一步的说明。
32.本发明基于压电驱动的新型高机动性轮式移动装置,由两个压电车轮和连接轴组成,两个压电车轮分别为左压电车轮和右压电车轮,其中连接轴两端分别与左压电车轮、右压电车轮的中心部分的端面胶合。
33.压电车轮包括定子4,转子2和轮胎1,定子4包括内部为十字形梁结构的圆环金属基体以及粘贴于圆环金属基体内表面中央平台处的压电陶瓷片5组成。中央平台位于圆环金属基体内表面的四个区域,该四个区域是由于十字形梁结构空间划分导致的,中央平台数量为4个,其上各粘贴有一片压电陶瓷片5。
34.转子2为具有开口的金属圆环组成,转子2与定子4形成空间同心环,并套在定子4的外表面。
35.轮胎1的材质为弹性橡胶,并套在转子2外表面。装配时,由内向外逐步嵌套即可完成装配任务。其中弹性橡胶套在定子4的结构可对转子2施加并调节预压力。
36.本发明基于压电驱动的新型高机动性轮式移动装置的控制方法,步骤如下:施加电激励方式由a相和b相组成,且a相,b相的相位差为90
°
;其中施加a相激励的压电陶瓷为2片,即第一压电陶瓷片和第二压电陶瓷片,且第一压电陶瓷片和第二压电陶瓷片的空间位置相对,同时极化方向相同。同理,其中施加b相激励的压电陶瓷为2片,即第三压电陶瓷片和第四压电陶瓷片,且第三压电陶瓷片和第四压电陶瓷片的空间位置相对,同时极化方向相同。a相和b相同频正弦信号之间的相位差为π/2,定子的两个正交工作模态被同时激发出来,使环形定子的外表面上的质点产生椭圆运动,进而在表面产生行波,并将振动通过摩擦环形转子的内表面,推动转子转动。其中工作模态为:3阶的弯振模态,该模态激发环形定子外表面的面外弯曲振动。
37.其中转子转动的正、反方向由a、b两相正弦信号的相位差确定,即π/2相位差使车轮正向运动、-π/2相位差使车轮反向运动。
38.在电激励方式,当对左车轮和右车轮同时施加同频率的电激励时,左、右车轮产生的转速一样,轮胎作用于地面,使得轮式移动装置产生向前或向后的直线运动。当对其中任一一个车轮关闭电激励时,相应的车轮将快速停止转动,因此左右两车轮转速产生差异,使得轮式移动装置产生向左或向右的转向运动。通过调节电激励的频率可实现直线运动的速度调节和转向运动的半径调节。
39.根据电激励下产生的定子外表面的面外弯曲振动方式,本发明相应设计了施加预应力结构。采用弹性橡胶套在具有开口的定子结构可对转子侧面施加并调节预压力,同时橡胶与地面接触可驱动装置运动。该施加预应力方式简单,可控,是一种高效的施加预应力方式。
40.下面通过一个具体的实施例来说明本发明基于压电驱动的新型高机动性轮式移动装置及其控制方法。
41.图1至图6为本发明装置的各部分结构及整体结构示意图。图7-图9为本发明装置的预应力施加方式及电激励后的振动方式。
42.参照图6所示,本发明基于压电驱动的新型高机动性轮式移动装置包括两个压电车轮和连接轴组成。连接轴两端分别与左、右压电车轮的中心部分的端面胶合,连接轴的作
用在于可连接左、右两压电车轮,同时具有隔绝振动传递的作用。
43.参照图5所示,左、右两压电车轮的结构相同。所述压电车轮包括定子4,转子2和轮胎1,由内向外逐步嵌套即可完成装配任务。其中轮胎1的材质为弹性橡胶,并套在定子4外表面。
44.参照图2所示,压电车轮中的转子2为具有开口的金属圆环。转子2与定子4形成空间同心环,并套在定子外表面。
45.参照图1所示,压电车轮中的定子4包括内部为十字形梁结构的圆环金属基体6,和粘贴于圆环金属基体6内表面中央平台处的压电陶瓷片5组成。中央平台位于圆环金属基体内表面的四个区域(该四个区域是由于十字形梁结构空间划分导致的),该中央平台数量为4个,各粘贴有一片矩形压电陶瓷片。
46.本发明还提供了上述轮式移动装置的控制方法,包括内容有电激励方式及具有特色的预应力施加方式。
47.参照图1、图8和图9所示,施加电激励方式由a相和b相组成,且a,b相的相位差为90
°
;其中施加a相激励的压电陶瓷为2片,即第一压电陶瓷片和第二压电陶瓷片,且第一压电陶瓷和第二压电陶瓷片的空间位置相对,同时极化方向相同。同理,其中施加b相激励的压电陶瓷为2片,即第三压电陶瓷片和第四压电陶瓷片,且第三压电陶瓷片和第四压电陶瓷片的空间位置相对,同时极化方向相同。a相和b相同频正弦信号之间的相位差为π/2,定子的两个正交工作模态被同时激发出来,使环形定子的外表面上的质点产生椭圆运动,进而在表面产生行波,并将振动通过摩擦环形转子的内表面,推动转子转动。经有限元计算,3阶的弯振模态激发环形定子外表面的面外弯曲振动,同时产生的振幅较高,提高了转子旋转转速。
48.其中转子2转动的正、反方向由a、b两相正弦信号的相位差确定,即π/2相位差使车轮正向运动、-π/2相位差使车轮反向运动。
49.当对左车轮和右车轮同时施加同频率的电激励时,左右车轮产生的转速一样,轮胎作用于地面,使得轮式移动装置产生向前或向后的直线运动。当对其中任一一个车轮关闭电激励时,相应的车轮将快速停止转动,因此左右两车轮转速产生差异,使得轮式移动装置产生向左或向右的转向运动。通过调节电激励的频率可实现直线运动的速度调节和转向运动的半径调节。
50.参照图7所示,根据电激励下产生的定子外表面的面外弯曲振动方式,本发明相应设计了新颖的施加预应力结构。采用弹性橡胶套在具有开口的定子结构可对转子侧面施加并调节预压力,同时橡胶与地面接触可驱动装置运动。该施加预应力方式简单,可控,是一种高效的施加预应力方式。
51.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下还可以作出若干改进,这些改进也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1