一种预增压介入控制方法与流程
1.本发明涉及车辆控制技术领域,具体涉及一种预增压介入控制方法。
背景技术:
2.esc(电子稳定性控制系统)在主动增压时会出现实际增压速率小于目标增压速率的情况,主要由以下两个原因造成:(1)柱塞泵电机转速在主动增压初期转速较慢,尚未达到目标转速,导致单位时间内泵入轮缸内的制动液较少,无法达到目标增压速率;(2)轮缸的p-v(压力式功图)曲线在低压区为非线性,这是由制动管路软管部分形变等材料问题造成的。在要求较高目标增压速率工况下,增压滞后问题会非常明显。
技术实现要素:
3.本发明要解决的技术问题是主动增压起始阶段增压速率低和压力滞后的情况,针对现有技术存在的上述缺陷,提供了一种预增压介入控制方法。
4.本发明为解决上述技术问题所采用的技术方案是:
5.一种预增压介入控制方法,其特征在于:该方法包括:
6.步骤一:设定计数器t,获取车辆的行驶路面的附着系数μ以及车辆质心侧偏角β,根据附着系数μ确定可调参数b1、边界参数b2和b3;
7.步骤二:根据质心偏转角β、可调参数b1、以及边界参数b2和b3确定车辆所处的状态,当车辆处于失稳状态时,通过dyc控制维持车辆稳定并重复步骤一;当车辆处于完全稳定状态时,无动作并重复步骤一;当车辆处于接近失稳状态时,预增压介入并进入下一步;
8.步骤三:根据质心偏转角β、可调参数b1和边界参数b3确定车辆是否处于完全稳定状态,若不处于,计数器t清零重复步骤三,若不处于,计数器t加1且进入下一步;
9.步骤四:判断计数器t是否小于k,若小于k则重复步骤二,若不小于k则取消预增压。
10.按上述技术方案,所述步骤二中:
11.当时,车辆处于失稳状态;
12.当时,车辆处于接近失稳状态;
13.当时,车辆处于完全稳定状态。
14.按上述技术方案,所述步骤一中,可调参数b1、边界参数b2和b3根据附着系数μ的取值如下:
15.附着系数b1b2b30.8≤μ<10.355.5710.790.6≤μ<0.80.334.658.970.4≤μ<0.60.34.228.140.2≤μ<0.40.293.346.39
μ<0.20.282.574.86
16.按上述技术方案,所述步骤四中k取值范围为15~25。
17.一种用于判断车辆状态的方法,其特征在于:获取车辆的行驶路面的附着系数μ以及车辆质心侧偏角β,根据附着系数μ确定可调参数b1、边界参数b2和b3;当时,车辆处于失稳状态;当时,车辆处于接近失稳状态;当时,车辆处于接近失稳状态;当时,车辆处于完全稳定状态。
18.按上述技术方案,所述步骤一中,可调参数b1、边界参数b2和b3根据附着系数μ的取值如下:
19.附着系数b1b2b30.8≤μ<10.355.5710.790.6≤μ<0.80.334.658.970.4≤μ<0.60.34.228.140.2≤μ<0.40.293.346.39μ<0.20.282.574.86
20.本发明具有以下有益效果:
21.本发明不涉及制造及工艺方法,不更改esc、hcu以及dyc等结构和功能。只需要通过计算和监测β的变化,根据相平面法利用可调参数b1、边界参数b2和b3确认预增压介入时机、预增压介入时机、预增压压力控制周期以及取消预增压流程,来改善主动增压起始阶段增压速率低和压力滞后的情况。
附图说明
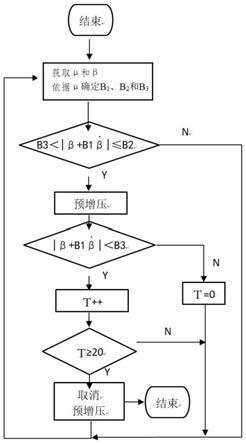
22.图1是本发明提供实施例的预增压控制器流程图;
23.图2是本发明提供实施例的预增压介入示意图;
24.图中,a、完全稳定状态;b、接近失稳状态;c、失稳状态区域。
具体实施方式
25.下面结合附图和实施例对本发明进行详细说明。
26.参照图1~图2所示,本发明提供的一种预增压介入控制方法,其特征在于:该方法包括:
27.步骤一:设定计数器t,获取车辆的行驶路面的附着系数μ以及车辆质心侧偏角β,根据附着系数μ确定可调参数b1、边界参数b2和b3。
28.步骤二:根据质心偏转角β、可调参数b1、以及边界参数b2和b3确定车辆所处的状态,本步骤通过边界参数b2和b3划分车辆的运行状态,通过可调参数b1和车辆质心侧偏角β确认车辆此时的运行状态。当车辆处于失稳状态时,通过dyc(基于直接横摆力矩控制)控制维持车辆稳定并重复步骤一。当车辆处于完全稳定状态时,无动作并重复步骤一。当车辆处于接近失稳状态时,dyc尚未介入,电机转动将少量制动液泵入hcu中,预增压介入并进入下一步骤。
29.步骤三:根据质心偏转角β、可调参数b1和边界参数b3确定车辆是否处于完全稳定状态,若不处于,计数器t清零重复步骤三,若不处于,计数器t加1且进入下一步。
30.步骤四:判断计数器t是否小于k,若小于k则重复步骤二,若不小于k则取消预增压。压力控制的控制周期为10ms。车辆的压力控制的控制周期为10ms,在hcu(液压执行单元)在预增压后,如果连续k个控制周期内车辆均处于完全稳定状态(即),意味着车辆在连续k个控制周期内处于不需要预增压的状态,此时需要通过电机和出油阀工作进行泄压。
31.本实施方式中,在步骤二中判断车辆处于接近失稳状态时,电机转动将少量制动液泵入hcu中。随后,如果下一控制周期判断车辆失稳,dyc介入时需要主动增压,此时预增压(电机转动将少量制动液泵入hcu中)能够有效改善主动增压初期压力滞后的问题。
32.在一些实施例中,步骤二中:
33.当时,车辆处于失稳状态;
34.当时,车辆处于接近失稳状态;
35.当时,车辆处于完全稳定状态。
36.在上述的一些实施例中,
37.本发明的一个实施例中,本发明的工作原理:步骤一中,可调参数b1、边界参数b2和b3根据附着系数μ的取值如下:
38.附着系数b1b2b30.8≤μ<10.355.5710.790.6≤μ<0.80.334.658.970.4≤μ<0.60.34.228.140.2≤μ<0.40.293.346.39μ<0.20.282.574.86
39.在上述的一些实施例中,步骤四中k取值范围为15~25,本实施例k取20。在hcu在预增压后,如果连续20个控制周期内车辆均处于完全稳定状态(即),意味着车辆在200ms内处于不需要预增压的状态,此时需要通过电机和出油阀工作进行泄压。
40.本发明还提供了一种用于判断车辆状态的方法,获取车辆的行驶路面的附着系数μ以及车辆质心侧偏角β,根据附着系数μ确定可调参数b1、边界参数b2和b3;当;当时,车辆处于失稳状态;当时,车辆处于接近失稳状态;当时,车辆处于接近失稳状态;当时,车辆处于完全稳定状态。如图2所述,本发明通过边界参数b2和b3将相平面划分为完全稳定状态a、接近失稳状态b、失稳状态区域c,通过上述三个区域用于确定车辆的实时状态。
41.在一些实施例中,步骤一中,可调参数b1、边界参数b2和b3根据附着系数μ的取值如下:
42.附着系数b1b2b30.8≤μ<10.355.5710.79
0.6≤μ<0.80.334.658.970.4≤μ<0.60.34.228.140.2≤μ<0.40.293.346.39μ<0.20.282.574.86
43.以上的仅为本发明的较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明申请专利范围所作的等效变化,仍属本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1