座椅升降器装置的制作方法
座椅升降器装置
1.相关申请的交叉引用
2.本技术要求2020年11月10日提交的日本专利申请第2020-187133号的优先权,该日本专利申请的全部内容以引用方式并入本文。
技术领域
3.本公开涉及一种座椅升降器装置。具体地,本公开涉及一种座椅升降器装置,该座椅升降器装置包括输出轴,该输出轴根据操作手柄的旋转操作量而升高和降低座椅。
背景技术:
4.jp-a-2016-78850中公开的车辆座椅包括能够调节座垫的座椅表面高度的座椅升降器装置。具体地,通过向上拉动操作手柄并向下推动操作手柄来将座椅表面高度每次升高和降低一定量,座椅升降器装置将操作手柄的操作移动量作为齿轮的进给旋转移动量来传递。当操作手柄的操作被释放时,座椅升降器装置将齿轮的旋转锁定在其位置,并且通过偏压操作手柄将操作手柄返回到操作之前的中立位置,使得座椅升降器装置返回到其中操作手柄能够被重新操作的初始状态。
5.伴随操作手柄的操作的齿轮的进给旋转通过在操作手柄的操作方向上推动与齿轮啮合的进给爪来执行。当操作手柄的操作被释放时,齿轮的旋转被如下锁定。也就是说,包括与齿轮啮合的一对对称结构的锁定棘爪具有棘轮啮合结构,其中一个对称结构伴随操作手柄的操作而脱开,而另一个对称结构在进给方向上释放旋转并在相反方向上咬合。当操作手柄的操作被释放时,另一个对称结构停止齿轮在其位置的旋转。
6.类似于锁定棘爪,执行齿轮的进给旋转的进给爪包括一对对称结构,以允许当操作手柄的操作被释放时操作手柄返回到中立位置的移动。进给棘爪具有棘轮啮合结构,其中一个对称结构伴随操作手柄的操作而脱开,而另一个对称结构与齿轮啮合以在进给方向上传递动力并在相反方向上释放旋转。
技术实现要素:
7.在上述相关技术中,当向下拉动操作手柄时,摩擦力被持续地施加到输出轴,以防止输出轴由于座椅的重量而滑移。然而,当超过摩擦力的过量载荷被输入到座椅时,座椅可能被降低超过操作手柄的旋转操作量。本公开可以提供一种座椅升降器装置,当座椅被降低时,该座椅升降器装置可以适当地阻止座椅滑移。
8.本公开的一个例示性方面提供了一种座椅升降器装置,该座椅升降器装置包括输出轴,该输出轴被构造成根据操作手柄的旋转操作量升高和降低座椅。座椅升降器装置包括:支撑单元,其支撑输出轴使得输出轴可旋转;和输入单元,其可旋转地联接到支撑单元并一体地联接到操作手柄。座椅升降器装置还包括:进给单元,其将输入单元的旋转传递到输出轴;和锁定单元,其锁定输出轴相对于支撑单元的旋转。座椅升降器装置还包括:摩擦产生单元,其设置在支撑单元和构造成与输出轴一起旋转的旋转构件之间;和防滑移单元,
其设置在输出轴和进给单元之间的动力传递路径中。
9.进给单元是棘轮型的,将输入单元从中立位置的双向旋转传递到输出轴,并且不将输入单元返回中立位置的旋转传递到输出轴。锁定单元响应于输入单元从中立位置旋转的操作解锁输出轴,并且响应于输入单元返回中立位置的操作锁定输出轴的旋转。摩擦产生单元响应于输入单元在座椅降低的方向上旋转的操作而在旋转构件和支撑单元之间施加摩擦力,从而停止由于座椅的重量导致的输出轴的在先旋转。防滑移单元通过输入单元从中立位置旋转的操作将进给单元的旋转传递到输出轴。当输入单元在座椅降低的方向上旋转并且输出轴克服摩擦产生单元的摩擦力在进给单元之前旋转以滑移时,防滑移单元响应于输出轴的滑移通过弹力配合到支撑单元以停止滑移。
10.根据上述构造,当输入单元在座椅降低的方向上旋转时,锁定单元解锁,并且输出轴经由进给单元在座椅降低的旋转方向上被进给。此时,通过摩擦产生单元来防止输出轴由于座椅的重量而滑移。即使当超过摩擦产生单元的摩擦力的向下旋转方向上的过量载荷从输出侧输入到输出轴时,防滑移单元也配合到支撑单元,从而防止滑移旋转。因此,当座椅降低时,有可能适当地停止座椅的滑移。
11.根据本公开的座椅升降器装置可以具有以下构造。防滑移单元在轴向方向上配合到支撑单元。
12.根据上述构造,防滑移单元能够以相对节省空间的方式构造。
13.根据本公开的座椅升降器装置可以具有以下构造。响应于进给单元旋转到输出轴不会由于输入单元的旋转而发生滑移的位置的操作,处于配合到支撑单元的状态的防滑移单元克服弹力从配合到支撑单元的状态被释放。
14.根据上述构造,即使在防滑移单元配合到支撑单元之后,防滑移单元也可以通过进给单元旋转到其中不发生滑移的位置而返回到其中防滑移单元可以再次起作用的状态。
15.根据本公开的座椅升降器装置可以具有以下构造。即使当输入单元处于中立位置时,防滑移单元也通过弹力配合到支撑单元。当输入单元在座椅降低的方向上旋转时,防滑移单元克服弹力从配合到支撑单元的状态被释放,从而允许输出轴(22)旋转。防滑移单元具有倾斜表面,并且当输入单元在座椅升高的方向上旋转时,通过倾斜表面抵靠支撑单元而克服弹力从配合到支撑单元的状态被释放,从而允许输出轴旋转。
16.根据上述构造,即使当输入单元处于中立位置时,也有可能防止输出轴滑移。即使利用这种构造,防滑移单元也可以避免阻碍输入单元在座椅升高的方向上旋转。
17.根据本公开的座椅升降器装置可以具有以下构造。当输入单元在座椅降低的方向上从中立位置旋转时,在锁定单元解锁输出轴之前,防滑移单元从配合到支撑单元的状态被释放。
18.根据上述构造,可以防止锁定单元首先被释放,并且可以防止过量的载荷被施加到防滑移单元。
附图说明
19.图1是示出根据第一实施例的座椅升降器装置的示意性构造的外侧视图;
20.图2是在座椅宽度方向上从内侧观察的在相同外侧上的结构的侧视图;
21.图3是示出操作手柄和旋转控制装置从座垫的侧框架拆卸的状态的分解透视图;
22.图4是在座椅宽度方向上从外侧观察的旋转控制装置的透视图;
23.图5是在座椅宽度方向上从内侧观察的旋转控制装置的透视图;
24.图6是在座椅宽度方向上从外侧观察的旋转控制装置的前视图;
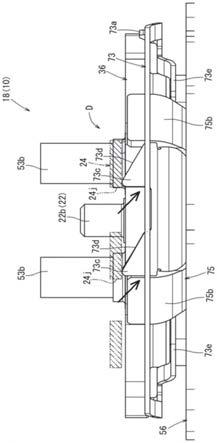
25.图7是沿着图6的线vii-vii截取的截面图;
26.图8是沿着图6的线viii-viii截取的截面图;
27.图9是在座椅宽度方向上从外侧观察的旋转控制装置的右半部的构造的分解透视图;
28.图10是在座椅宽度方向上从外侧观察的旋转控制装置的左半部的构造的分解透视图;
29.图11是在座椅宽度方向上从内侧观察的旋转控制装置的右半部的构造的分解透视图;
30.图12是在座椅宽度方向上从内侧观察的旋转控制装置的左半部的构造的分解透视图;
31.图13是示出旋转控制装置的一部分的组装状态的分解透视图;
32.图14是示出旋转控制装置的一部分的组装状态的分解透视图;
33.图15是示出旋转控制装置的一部分的另一组装状态的分解透视图;
34.图16是示出旋转控制装置的一部分的另一组装状态的分解透视图;
35.图17是示出当操作手柄处于中立位置时进给单元的状态的示意图;
36.图18是示出当操作手柄处于中立位置时锁定单元的状态的示意图;
37.图19是示出当操作手柄从中立位置被向下推动时进给单元的状态的示意图;
38.图20是示出当操作手柄从中立位置被向下推动时锁定单元的状态的示意图;
39.图21是示出当操作手柄被进一步向下推动时锁定单元的状态的示意图;
40.图22是示出当操作手柄返回到中立位置时进给单元的状态的示意图;
41.图23是示出当操作手柄返回到中立位置时锁定单元的状态的示意图;
42.图24是示出当操作手柄从中立位置被向上拉动时进给单元的状态的示意图;
43.图25是示出当操作手柄从中立位置被向上拉动时锁定单元的状态的示意图;
44.图26是示出当操作手柄被进一步向上拉动时锁定单元的状态的示意图;
45.图27是示出当操作手柄返回到中立位置时进给单元的状态的示意图;
46.图28是示出当操作手柄返回到中立位置时锁定单元的状态的示意图;
47.图29是示出当操作手柄处于中立位置时输入单元的状态的前视图;
48.图30是沿着图17中的箭头xxx截取的视图;
49.图31是沿着图17中的箭头xxxi截取的视图;
50.图32是沿着图19中的箭头xxxii截取的视图;
51.图33是沿着图19中的箭头xxxiii截取的视图;
52.图34是当输出轴降低时在输出轴中发生滑移时对应于图19的示意图;
53.图35是沿着图34中的箭头xxxv截取的视图;
54.图36是沿着图34中的箭头xxxvi截取的视图;
55.图37是沿着图24中的箭头xxxvii截取的视图;以及
56.图38是沿着图24中的箭头xxxviii截取的视图。
具体实施方式
57.在下文中,将参照附图描述本公开的实施例。
58.{第一实施例}
59.首先,将参照图1至图38描述根据本公开的第一实施例的座椅升降器装置10的构造。在以下描述中,向前方向、向后方向、向上方向、向下方向、向左方向和向右方向是指附图中所示的方向。术语“座椅宽度方向”是指稍后将描述的座椅1的左右方向。此外,在以下描述中,当没有示出具体的参考视图时或者当参考视图中没有对应的附图标记时,适当地参考图1至图16中的一个。
60.{座椅升降器装置10的示意性构造}
61.根据本实施例的座椅升降器装置10应用于汽车的座椅1。如图1和图2所示,座椅1包括作为用于就座乘客的靠背部分的座椅靠背2和作为座椅部分的座垫3。座椅靠背2经由调角器(未示出)联接到座垫3的后端部部分,使得靠背角度是可调节的。座垫3经由包括一对左和右导轨结构的座椅滑动装置4联接到车辆的地板f,使得座垫3在前后方向上的位置是可调节的。
62.包括一对左和右连杆结构的座椅升降器装置10联接在座垫3和包括一对左和右导轨结构的座椅滑动装置4之间。通过座椅升降器装置10的联接,座垫3在高度方向上相对于地板f的位置也是可调节的。
63.座椅滑动装置4是已知的装置,并且包括在前后方向上延伸的一对左和右下导轨4a,以及组装到相应的左和右下导轨4a以在前后方向上可滑动的一对左和右上导轨4b。一对左和右下导轨4a中的每一个经由一对前和后腿4c固定到地板f。
64.座椅升降器装置10包括固定到上导轨4b中的每一个的支撑托架14,以及联接在支撑托架14和座垫3的对应侧框架3a之间的一对前和后连杆构件11。通过联接,座椅升降器装置10包括一对左和右四关节连杆机构12,其中该对前和后连杆构件11在左侧和右侧上的侧框架3a和支撑托架14之间执行连杆移动。
65.如图2所示,在前、后、左和右四个连杆构件11中,右后连杆构件11形成有扇形齿轮11a,该扇形齿轮11a与附接到右侧框架3a的旋转控制装置18的小齿轮22a啮合。利用上述构造,右后连杆构件11接收来自小齿轮22a的旋转驱动力的传递并执行连杆移动。右后连杆构件11的上端部部分经由扭矩杆17可旋转地联接到右侧框架3a。
66.扭矩杆17一体地桥接在右后连杆构件11的上端部部分和左后侧连杆构件11的上端部部分之间,以同步地驱动和旋转这两个连杆构件11。当后连杆构件11同时执行连杆移动时,构成四杆连杆机构12的前连杆构件11也同步地执行连杆移动。因此,座垫3在相对于地板f的高度方向上的位置被调节。
67.旋转控制装置18组装到右侧框架3a的右侧部分。具体地,旋转控制装置18在其中小齿轮22a插入穿过形成在右侧框架3a中的通孔3a1并与位于侧框架3a的左侧上的扇形齿轮11a啮合的状态下组装到侧框架3a。如图3所示,向前延伸的操作手柄5组装到旋转控制装置18。
68.操作手柄5从座垫3的右后部分向前延伸,并且允许用户从中立位置向上拉动操作手柄5和向下推动操作手柄5。当操作手柄5从中立位置被向上拉动和向下推动时,对应于在对应操作方向上的移动量的旋转力被输入到旋转控制装置18。因此,在对应操作方向上的
旋转力被传递到形成在旋转控制装置18的输出轴22上的小齿轮22a,并且右后连杆构件11在对应于操作方向的旋转方向上移动。
69.具体地,旋转控制装置18将操作手柄5恒定地保持在中立位置,并且防止输出轴22在操作手柄5被操作之前旋转。当操作手柄5从中立位置被向上拉动时,旋转控制装置18向小齿轮22a输出在右后连杆构件11向前升起的方向上的旋转力。因此,座垫3被从地板f向上拉动。
70.当操作手柄5从中立位置被向下推动时,旋转控制装置18向小齿轮22a输出在右后连杆构件11向后倾斜的方向上的旋转力。因此,座垫3被朝向地板f向下推动。在操作手柄5从中立位置被向上拉动和向下推动之后,操作手柄5的操作状态被释放。因此,旋转控制装置18操作以将小齿轮22a停止在其旋转位置,并将操作手柄5返回到中立位置。
71.{旋转控制装置18的示意性构造}
72.在下文中,将参照图4至图38描述旋转控制装置18的具体构造。构成旋转控制装置18的所有构件都是压制金属构件。
73.如图4至图8所示,旋转控制装置18是基本上圆盘形的单元,其轴向方向在座椅宽度方向上定向。具体地,如图9至图12所示,旋转控制装置18包括与操作手柄5(参见图3)一体地组装的输入单元n和与右侧框架3a(参见图3)一体地组装的支撑单元s。
74.旋转控制装置18包括:输出轴22,其接收从输入单元n传递的旋转力;和进给单元a,其将旋转力从输入单元n传递到输出轴22。旋转控制装置18还包括:锁定单元b,其在没有旋转力从输入单元n传递时锁定输出轴22的旋转;和增速单元u,其增加输出轴22的旋转速度,并将旋转传递到锁定单元b和增速单元u之间的动力传递路径。旋转控制装置18还包括:摩擦产生单元g,其将摩擦力施加到输出轴22的旋转;和防滑移单元d,其防止输出轴22在向下旋转期间滑移。
75.将详细描述上述单元的构造。输入单元n包括外杠杆41和内杠杆53,它们各自具有基本上圆盘的形状。外杠杆41和内杠杆53在沿着座椅宽度方向延伸的中心轴线c上并排地一体组装,在它们之间插置有盖24(稍后将描述)。
76.支撑单元s包括基本上圆盘形的本体基部23、基本上环板形的中间基部25和基本上圆盘形的盖24。本体基部23、中间基部25和盖24在沿着座椅宽度方向延伸的中心轴线c上依次并排地一体组装。
77.进给单元a包括四个进给爪52、基本上圆盘形的旋转传递板36和基本上圆盘形的输出板75。四个进给爪52可旋转地组装到内杠杆53。旋转传递板36和内杠杆53在沿着座椅宽度方向延伸的中心轴线c上并排地组装,并且能够围绕中心轴线c相对地旋转。
78.旋转传递板36组装到输出板75,使得输出板75可以在旋转方向上一起旋转。输出轴22插入输出板75的中心部分(中心轴线c穿过的部分),并且与输出板75一体地组装。
79.如图17所示,通过将四个进给爪52与形成在旋转传递板36的外周边部分上的内齿轮36a啮合,旋转传递板36连结到内杠杆53,以在旋转方向上与内杠杆53成一体。如图19和图24所示,当内杠杆53在任一方向上从中立位置旋转时,稍后将描述的对应的一对四个进给爪52从内齿轮36a脱开,并且旋转传递板36通过与剩余的一对进给爪52啮合而在内杠杆53的旋转方向上被进给。
80.通过上述旋转,旋转传递板36在对应的旋转方向上进给经由输出板75联接的输出
轴22。如图22和图27所示,当被操作的内杠杆53的旋转返回时,旋转传递板36仅将内杠杆53返回到操作之前的初始位置(中立位置),而旋转传递板36本身保持在旋转传递板36旋转到的位置。也就是说,如图19和图24所示,当内杠杆53在任一方向上从中立位置旋转时,旋转传递板36在对应的旋转方向上被进给。然后,旋转传递板36通过由锁定单元b锁定的输出轴22而被一次锁定在上述操作停止的位置。
81.然而,如图22和图27所示,当内杠杆53从旋转传递板36被锁定的位置返回到操作之前的初始位置(中立位置)时,旋转传递板36通过滑动与旋转传递板36啮合的一对进给爪52而仅将内杠杆53与对应的进给爪52一起返回到操作之前的初始位置,而旋转传递板36本身保持在锁定位置。
82.如图10和图12所示,锁定单元b包括四个棘爪32和基本上圆盘形的旋转板37。四个棘爪32可旋转地组装到中间基部25。旋转板37经由构成增速单元u的行星齿轮机构64齿轮联接到输出轴22以传递动力。如图18所示,四个棘爪32通过与形成在旋转板37的外周边部分上的内齿轮37a啮合来锁定旋转板37相对于中间基部25的旋转。
83.齿轮联接到旋转板37的输出轴22的旋转通过上述锁定来锁定。如图20和图25所示,当外杠杆41在任一方向上从中立位置旋转时,四个棘爪32中的对应的一对棘爪32经由稍后将描述的控制板56从旋转板37的内齿轮37a脱开。因此,四个棘爪32中的剩余一对棘爪32处于其中旋转板37被允许在对应方向上旋转的状态,以及其中旋转板37和输出轴22被允许在对应方向上旋转的状态,如图21和图26所示。
84.当被操作的外杠杆41的旋转被返回时,与四个棘爪32的内齿轮37a啮合的一对棘爪32防止旋转板37在返回方向上旋转,使得旋转板37和输出轴22保持在锁定状态。然后,如图23和图28所示,当外杠杆41的旋转返回时,四个棘爪32中的剩余一对棘爪32也返回到与旋转板37的内齿轮37a啮合的状态,并且旋转板37在两个方向上的旋转被锁定。
85.如图10和图12所示,增速单元u包括基本上圆盘形的行星齿轮架62、三个行星齿轮63、形成在本体基部23的外周边部分上的内齿轮23e以及在其中心部分处具有太阳齿轮37d的旋转板37。如图13所示,通过将输出轴22插入行星齿轮架62的中心部分(中心轴线c穿过的部分),行星齿轮架62与输出轴22一体地组装。三个行星齿轮63可旋转地组装到行星齿轮架62。
86.与行星齿轮架62一体地组装的输出轴22插入旋转板37的中心部分(中心轴线c穿过的部分),使得在旋转板37的中心部分处的太阳齿轮37d齿轮联接到三个行星齿轮63以传递动力(参见图14)。如图13所示,联接的三个行星齿轮63齿轮联接到形成在本体基部23的外周边部分上的内齿轮23e,以传递动力。因此,当输出轴22在任一方向上从中立位置旋转时,三个行星齿轮63绕转,同时经由行星齿轮架62沿着本体基部23的内齿轮23e在其自身轴线上旋转。当三个行星齿轮63旋转时,具有齿轮联接到行星齿轮63的中心部分的太阳齿轮37d的旋转板37在与输出轴22相同的旋转方向上旋转。
87.此时,旋转板37根据齿轮之间的齿轮比以增加的速度旋转,以在高于输出轴22的速度的速度下旋转。以这种方式,输出轴22的旋转通过增速单元u来增加速度并传递到旋转板37,使得旋转板37可以被锁定单元b锁定而不会在旋转方向上引起大的反冲。
88.如图10和图12所示,摩擦产生单元g包括具有开口环形状的摩擦环57和具有截头三角形柱状形状的控制件58。控制件58设置在摩擦环57的端部部分57a之间。摩擦环57配合
到圆盘形旋转板37的外周边部分。摩擦环57具有比自由状态下的旋转板37的外周边部分稍小的开口环形状。这里,旋转板37对应于本公开的“旋转构件”。
89.如图13和图14所示,摩擦环57克服其弹力配合到旋转板37的外周边部分,使得弹力被施加到旋转板37的外周边部分,该弹力在基本上整个圆周上从外周边侧挤压旋转板37的外周边部分。通过上述挤压,摩擦环57向旋转板37的旋转施加滑动摩擦阻力。
90.摩擦环57的开口环被稍后将描述的控制件58打开,使得摩擦环57抵靠旋转板37的挤压状态被释放。因此,摩擦环57从向旋转板37施加摩擦被释放。摩擦环57的两个端部部分57a倾斜地弯曲,以朝向径向外侧以山形彼此接近。
91.当摩擦环57如上所述向旋转板37的外周边部分施加摩擦力时,实现了以下效果。也就是说,由于输出轴22的旋转被增速单元u增加速度并传递到旋转板37,从摩擦环57传递到旋转板37的摩擦力被有效地施加。结果,当摩擦环57压靠在旋转板37上时(当输出轴22向下旋转时,这将在后面描述),有可能有效地防止输出轴22在向下旋转方向上滑移。
92.如图10和图12所示,控制件58设置在摩擦环57的端部部分57a之间,并且仅能够相对于盖24(参见图9)径向向内和向外移动。如图17所示,当外杠杆41处于中立位置时,控制件58保持在其中控制件58被稍后将描述的控制板56径向向外挤出的状态。因此,控制件58通过截头三角形柱状形状的两个倾斜表面扩大了在摩擦环57的端部部分57a之间的宽度,并且将摩擦环57保持在其中摩擦环57被从压靠在旋转板37上释放的状态下。
93.如图24所示,即使当外杠杆41在输出轴22向上旋转的方向(图中的逆时针方向)上从中立位置旋转时,控制件58也保持在其中控制件58被稍后将描述的控制板56径向向外挤出的状态。因此,控制件58将摩擦环57保持在其中摩擦环57被从压靠在旋转板37上释放的状态,这是摩擦环57的端部部分57a之间的宽度以与上述相同的方式扩大的状态。
94.然而,如图19所示,当外杠杆41在输出轴22向下旋转的方向(图中的顺时针方向)上从中立位置旋转时,控制件58被稍后将描述的控制板56径向向内拉动。因此,控制件58从其中摩擦环57的端部部分57a之间的宽度扩大的状态被释放。结果,摩擦环57被弹力压靠在旋转板37的外周边部分上,并且滑动摩擦阻力被施加到旋转板37的旋转上。
95.如图10和图12所示,旋转控制装置18还包括控制板56,控制板56整体上具有双内环板和外环板形状。控制板56由输出轴22可旋转地支撑,输出轴22被插入控制板56的中心部分(中心轴线c穿过的部分)。通过将从图9和图11所示的外杠杆41延伸的两个臂41c配合到控制板56的外周边部分,控制板56与外杠杆41一体地组装。
96.如图20和图25所示,当外杠杆41在任一方向上从中立位置旋转时,控制板56与外杠杆41一体地旋转,并且操作以将四个棘爪32中的对应的一对棘爪32从旋转板37的内齿轮37a上脱开。如图24所示,当外杠杆41在输出轴22向上旋转的方向(图中的逆时针方向)上旋转时,控制板56将控制件58保持在控制件58被径向向外挤出的状态。然而,如图19所示,当外杠杆41在输出轴22向下旋转的方向(图中的顺时针方向)上旋转时,控制板56被操作以径向向内拉动控制件58。
97.因此,摩擦环57被弹力压靠在旋转板37的外周边部分上,并且滑动摩擦阻力被施加到旋转板37的旋转上。以这种方式,由于摩擦力被施加到在输出轴22被向下推动的方向上的旋转,有可能有效地防止输出轴22由于其自身重量施加到座椅1等的影响而在输出轴22被向下推动的方向上滑移。
98.如图9和图11所示,防滑移单元d包括输出板75和组装到输出板75的基本上环板形的板簧73。板簧73在圆周方向上的一部分固定到输出板75,并且板簧73在圆周方向上的另一部分可以在轴向方向上弯曲,就像具有作为支点的固定部分的悬臂支撑梁的弯曲一样。
99.板簧73在弹力被持续地施加以将板簧73的另一部分弯曲到右侧(座椅宽度方向上的外侧)的状态下组装到输出板75。因此,如图17、图30和图31所示,当外杠杆41处于中立位置时,板簧73处于这样的状态,其中形成在板簧73的自由端侧上并向右侧突出的配合件73c通过弹力配合到形成在盖24中的配合孔24j中。
100.通过上述配合,板簧73锁定输出板75在图17所示的顺时针方向(向下旋转方向)上的旋转,并允许输出板75在逆时针方向(向上旋转方向)上旋转。这是因为,如图31所示,板簧73的配合件73c中的每一个具有倾斜表面73d,倾斜表面73d的突起在图中的逆时针方向上减小。
101.也就是说,在其中配合件73c配合到盖24的配合孔24j中的状态下,板簧73的配合件73c中的每一个的侧表面相对于输出板75在图中的顺时针方向(向下旋转方向)上的旋转笔直地抵靠配合孔24j的内侧表面中对应的一个。然而,板簧73的配合件73c中的每一个的倾斜表面73d相对于输出板75在图中的逆时针方向(向上旋转方向)上的旋转倾斜地抵靠对应的配合孔24j的内侧表面。因此,板簧73的配合件73c克服伴随输出板75的旋转的弹力被从配合孔24j中拉出,该弹力由于倾斜抵接而通过引导产生(参考图37和图38)。
102.当外杠杆41如图19所示从其中外杠杆41处于图17所示的中立位置的状态在顺时针方向(向下旋转方向)上旋转时,板簧73的配合件73c从配合孔24j中被拉出。因此,输出板75在顺时针方向上的旋转锁定状态被释放。具体地,如图19所示,当外杠杆41在顺时针方向(向下旋转方向)上旋转时,旋转传递板36在顺时针方向上旋转。
103.因此,形成在旋转传递板36的外周边部分上的挤压部分36d将板簧73的挤压件73a挤压到左侧,如图32所示。因此,如图33所示,板簧73被操作以克服弹力将配合件73c从盖24的配合孔24j中拉出。结果,输出板75被允许在图中的顺时针方向上旋转(向下旋转)。
104.如图34所示,当输出轴22通过外杠杆41的操作在图中的顺时针方向上向下旋转时,当输出轴22发生滑移(其中输出轴22克服摩擦环57的摩擦力在旋转传递板36之前旋转)时,板簧73如图35和图36所示从挤压部分36d脱离。因此,板簧73通过其弹力使配合件73c再次配合到盖24的配合孔24j中。
105.通过上述配合,板簧73锁定输出板75在顺时针方向上的旋转,并停止输出轴22的滑移。然后,当板簧73通过外杠杆41的操作旋转到其中旋转传递板36赶上输出轴22的位置时,板簧73的挤压件73a被挤压部分36d向左推动,如图19和图32所示。因此,如图33所示,板簧73的配合件73c从盖24的配合孔24j中被拉出,并且允许输出板75向下旋转。
106.如图9至图12所示,旋转控制装置18还包括扭簧35、43、71和55。扭簧35被钩在外杠杆41和盖24之间,并将外杠杆41相对于盖24偏压到中立位置。
107.扭簧43中的每一个扭簧被钩在四个进给爪52中对应的一对上和下进给爪52之间,并且在其中进给爪52与旋转传递板36的内齿轮36a啮合的旋转方向上偏压进给爪52。扭簧71被钩在旋转传递板36和输出板75之间,并且在其中输出板75相对于旋转传递板36在向下旋转方向上被偏压并且抵靠旋转传递板36的状态下保持输出板75。扭簧55中的每一个被钩在对应的一对上和下棘爪32(一对上和前棘爪32和一对后和下棘爪32)之间,并且在其中棘
爪32与旋转板37的内齿轮37a啮合的旋转方向上偏压棘爪32。
108.{旋转控制装置18的每个单元的具体构造}
109.接下来,将详细描述构成旋转控制装置18的构件。图4至图8示出了旋转控制装置18的组装状态。图9至图12是透视图,其中旋转控制装置18被拆卸成部分。图13至图16是透视图,其中旋转控制装置18被组装成部分。图17至图38是示出针对每一层的旋转控制装置18的操作的示意图。
110.因此,在以下描述中,旋转控制装置18的组装状态将适当地参考图4至图8。单个构件的构造将适当地参考图9至图12。构件的组装状态将适当地参考图13至图16。构件的操作将适当地参考图17至图38。
111.首先,将描述构成输入单元n的外杠杆41和内杠杆53的构造。如图9至图12等所示,外杠杆41由基本上圆盘形的构件形成,该构件的表面面向座椅宽度方向。外杠杆41与操作手柄5一体地组装。
112.外杠杆41在中心部分(中心轴线c穿过的部分)中形成有中心孔41a。中心孔41a以圆孔形状在轴向方向上穿透中心部分。构成在右侧(座椅宽度方向上的外侧)上的输出轴22的端部部分的第四柱状轴部分22g从左侧插入中心孔41a中,并且可旋转地配合在其中(参见图7和图8)。外杠杆41在圆周方向上的对称位置(上部和下部位置)中的圆盘部分的中间部分中形成有通孔41b。通孔41b以圆孔形状在轴向方向上穿透中间部分。
113.从内杠杆53向右侧突出的一对止动销53b从左侧插入通孔41b中,并且一体地连结到通孔41b。因此,外杠杆41一体地连结到内杠杆53。
114.外杠杆41在前下侧和后上侧上的两个位置中的周边边缘部分处形成有臂41c。臂41c在轴向方向(向左方向)上以直角弯曲并悬伸。臂41c穿过形成在盖24中的对应通孔24g,并且从右侧插入形成在控制板56的外周边部分中的对应插入凹槽56d中,以一体地配合在其中。因此,外杠杆41与控制板56一体地旋转。
115.内杠杆53由基本上圆盘形的构件形成,该构件的表面面向座椅宽度方向。内杠杆53在中心部分(中心轴线c穿过的部分)中形成有中心孔53a。中心孔53a以圆孔形状在轴向方向上穿透中心部分。构成输出轴22的轴向中间部分的第三柱状轴部分22f从左侧插入中心孔53a中,并且可旋转地配合在其中(参见图7和图8)。
116.内杠杆53在圆周方向上的对称位置(上部和下部位置)中的圆盘部分的中间部分中形成有细长通孔53c。通孔53c在轴向方向上穿透中间部分。该对止动销53b从右侧插入通孔53c中,到达止动销53b抵靠座椅的位置,并且一体地连结到通孔53c。因此,内杠杆53一体地连结到外杠杆41。
117.内杠杆53在圆周方向上的四个位置中的圆盘部分的中间部分处形成有轴销53d。轴销53d在轴向方向(向右方向)上以圆销形状突出。四个进给爪52从右侧配合到轴销53d,并且可旋转地联接到轴销53d。
118.接下来,将参照图9至图12等描述构成支撑单元s的本体基部23、中间基部25和盖24的构造。本体基部23由基本上圆盘形的构件形成,该构件的表面面向座椅宽度方向。本体基部23在外周边部分处形成有内齿轮23e。内齿轮23e被半冲压成在轴向方向(向右方向)上挤出成基本上圆柱形的形状。
119.内齿轮23e在其内周边表面上具有在整个圆周上形成为环形形状的内齿。内齿可
以与三个行星齿轮63啮合以传递动力。本体基部23在内齿轮23e的中心部分(中心轴线c穿过的部分)中形成有中心孔23c。中心孔23c以圆孔形状在轴向方向上穿透中心部分。形成在输出轴22的左侧(座椅宽度方向上的内侧)上的端部部分处的小齿轮22a从右侧(座椅宽度方向上的外侧)插入中心孔23c中。构成输出轴22的轴向中间部分的第一柱状轴部分22b可旋转地配合到中心孔23c(参见图7和图8)中。
120.本体基部23形成有围绕中心孔23c的台阶状凹陷部分23f。台阶状凹陷部分23f将中心孔23c的周边同心地凹陷到容纳凹陷部分23b的左侧,该容纳凹陷部分23b是内齿轮23e中的区域。构成输出轴22的轴向中间部分的圆盘形凸缘22h可旋转地配合到台阶状凹陷部分23f(参见图7和图8)。
121.通过上述组装,输出轴22的轴向中间部分、组装到中间部分的行星齿轮架62和三个行星齿轮63容纳在容纳凹陷部分23b中,该容纳凹陷部分23b是本体基部23的内齿轮23e(参见图7、图8和图13)中的区域。具体地,三个行星齿轮63与本体基部23的内齿轮23e啮合以传递动力。
122.本体基部23的表面在内齿轮23e的突出顶部处面向轴向方向(向右方向)的部分是座部分23a。盖24的座部分24d在轴向方向上抵靠座部分23a。锁定部分23d形成在座部分23a周围的三个位置中。锁定部分23d在轴向方向(向右方向)上以基座形状突出,并且在轴向方向上抵靠并一体地螺栓连接(未示出)到突出部分25c。突出部分25c从中间基部25周围的对应的三个位置径向向外突出。
123.中间基部25和盖24从右侧(座椅宽度方向上的外侧)沿轴向方向依次重叠在座部分23a上,并且通过螺栓连接一体地连结到座部分23a。本体基部23也螺栓连接并一体地连结到右侧框架3a(参见图3)。
124.本体基部23在座部分23a上的下部位置中形成有导向突起23g。导向突起23g在轴向方向(向右方向)上突出,从而以条形形状径向向内和向外笔直地延伸。形成在控制件58中的滑动凹槽58a(将在稍后描述)从右侧配合到导向突起23g中,以径向可滑动。因此,控制件58与本体基部23的导向突起23g接合,从而仅可径向向内和向外移动。
125.中间基部25由基本上环形的构件形成,该构件的表面面向座椅宽度方向。中间基部25在具有环板形状的座部分25a的圆周方向上的四个位置中形成有轴销25b。轴销25b在轴向方向(向左方向)上以圆销形状突出。四个棘爪32从左侧配合到轴销25b中,并且可旋转地联接到轴销25b。
126.中间基部25在座部分25a的圆周方向上的三个位置中形成有突出部分25c。突出部分25c径向向外突出。突出部分25c从右侧抵靠形成在本体基部23的座部分23a处的三个位置中的对应的锁定部分23d,并且螺栓连接和一体地连结到锁定部分23d。
127.盖24由基本上圆盘形的构件形成,该构件的表面面向座椅宽度方向。盖24形成有凸缘24h,该凸缘24h从盖24的外周边边缘在轴向方向(向左方向)上以基本上圆柱形的形状突出。由于以直角弯曲并从凸缘24h的突出顶部处的三个位置延伸到外周边侧的座部分24d抵靠并螺栓连接到本体基部23的座部分23a,盖24一体地联接到本体基部23。通过上述连结,盖24设置在其中诸如进给单元a和锁定单元b的部件被封闭在盖24和本体基部23之间的状态下(参见图4和图5)。
128.盖24在其圆盘部分的中心部分(中心轴线c穿过的部分)中形成有中心孔24a。中心
孔24a以圆孔形状在轴向方向上穿透中心部分。构成在右侧(座椅宽度方向上的外侧)上的输出轴22的端部部分的第四柱状轴部分22g从左侧插入中心孔24a中,并且可旋转地配合在其中(参见图7和图8)。
129.盖24还在圆盘部分的周边边缘部分中形成有两个弹簧钩孔24b。弹簧钩孔24b中的每一个具有在轴向方向上穿透周边边缘部分的弧形形状。从外杠杆41的下边缘部分向下延伸的操作件41d从右侧重叠在弹簧钩孔24b之间。
130.扭簧35的端部部分从左侧插入对应的两个弹簧钩孔24b中。然后,操作件41d在圆周方向上被夹在插入弹簧钩孔24b中的扭簧35的端部部分之间。通过上述组装,外杠杆41被扭簧35的偏压力偏压到盖24,使得操作件41d恒定地保持在两个弹簧钩孔24b之间的位置(操作之前的中立位置,参见图6)。
131.如图10等所示,盖24还在圆盘部分的周边边缘部分处形成有骑跨部分24c。骑跨部分24c以直角被切割和升高,并且从在圆周方向上的对称位置(前和后位置)在轴向方向(向左方向)上突出。如图17所示,骑跨部分24c中的每一个插入四个进给爪52中的对应的一对上和下进给爪52之间。
132.如图19所示,当内杠杆53在输出轴22向下旋转的方向(图中的顺时针方向)上旋转时,四个进给爪52中的右上侧(前上侧)和左下侧(后下侧)上的两个进给爪52抵靠骑跨部分24c的边缘,并且两个进给爪52从旋转传递板36的内齿轮36a脱开。如图22所示,当内杠杆53的旋转返回时,骑跨部分24c将两个脱开的进给爪52返回到其中两个进给爪52与旋转传递板36的内齿轮36a啮合的状态。
133.类似地,如图24所示,当内杠杆53在输出轴22向上旋转的方向(图中的逆时针方向)上旋转时,四个进给爪52中的左上侧(后上侧)和右下侧(前下侧)上的两个进给爪52抵靠骑跨部分24c的边缘,并且两个进给爪52从旋转传递板36的内齿轮36a脱开。如图27所示,当内杠杆53的旋转返回时,骑跨部分24c将两个脱开的进给爪52返回到其中两个进给爪52与旋转传递板36的内齿轮36a啮合的状态。
134.如图10等所示,盖24在圆周方向上的对称位置(上部和下部位置)中的圆盘部分的中间部分中形成有导向孔24e。导向孔24e以围绕中心轴线c画出的弧形延伸的形状在轴向方向上穿透中间部分。在轴向方向上横跨外杠杆41和内杠杆53延伸的止动销53b从左侧插入导向孔24e中。
135.导向孔24e中的每一个导向孔具有以弧形延伸的孔形状,从而释放外杠杆41和内杠杆53在向下旋转方向或向上旋转方向上从中立位置(参见图29)一体地旋转的移动。此外,导向孔24e将外杠杆41和内杠杆53的向上和向下移动锁定在其中止动销53b抵靠以弧形延伸的孔的端部部分的位置。
136.如图9等所示,在盖24的前下侧和后上侧上的两个位置中,盖24在圆盘部分的周边边缘部分中形成有通孔24g。通孔24g以围绕中心轴线c画出的弧形延伸的形状在轴向方向上穿透周边边缘部分。在轴向方向(向左方向)上从外杠杆41的周边边缘部分突出的对应臂41c从右侧插入对应的通孔24g中。因此,当外杠杆41从中立位置旋转时,通孔24g释放臂41c的移动。
137.盖24在圆周方向上的十二个位置中的圆盘部分的周边边缘部分中形成有配合孔24j。配合孔24j以围绕中心轴线c画出的同心弧形延伸的形状在轴向方向上穿透周边边缘
部分。配合孔24j是用于通过将构成防滑移单元d的板簧73的配合片73c从左侧配合到配合孔24j来锁定与板簧73一体地联接的输出板75的移动和输出轴22在向下旋转方向上的移动的孔。
138.接下来,将参照图9、图11等描述构成进给单元a的四个进给爪52、旋转传递板36和输出板75的构造。四个进给爪52中的每一个由臂形构件形成,该构件的表面面向座椅宽度方向。每个进给爪52形成有中心孔52b,该中心孔52b在轴向方向上以圆孔形状穿透进给爪52的基部端部部分。形成在内杠杆53上的轴销53d中的每一个从右侧配合到对应的中心孔52b中,使得进给爪52可旋转地联接到轴销53d。
139.如图17所示,四个进给爪52并排地布置在内杠杆53上,并且在前后方向和上下方向中的每一个上成对地构成。在四个进给爪52中,在前上侧和后下侧上的两个进给爪52中的每一个具有其臂在图中的逆时针方向上从旋转中心(轴销53d)延伸的形状。在前下侧和后上侧上的两个进给爪52中的每一个具有其臂在图中的顺时针方向上从旋转中心(轴销53d)延伸的形状。
140.四个进给爪52在其臂的顶端部分处形成有外齿52a。外齿52a可以与旋转传递板36的内齿轮36a啮合。扭簧43中的每一个被钩在四个进给爪52中对应的一对上和下进给爪52之间。
141.前扭簧43设置在其中其一个端部和另一个端部在偏压方向上分别压靠前上进给爪52和前下进给爪52的状态,在偏压方向上,回弹力被施加到前上进给爪52和前下进给爪52。后扭簧43设置在其中其一个端部和另一个端部在偏压方向上分别压靠后上进给爪52和后下进给爪52的状态,在偏压方向上,回弹力被施加到后上进给爪52和后下进给爪52。
142.通过组装扭簧43,如图17所示,进给爪52被持续挤压并围绕对应的旋转中心(轴销53d)径向向外旋转,并且进给爪52的外齿52a保持在与旋转传递板36的内齿轮36a啮合的状态。在四个进给爪52中,在前上侧和后下侧上的一对两个进给爪52与在前下侧和后上侧上的一对两个进给爪52之间,由外齿52a施加到旋转传递板36的内齿轮36a的啮合力是不同的。
143.具体地,当在后上侧和前下侧上的两个进给爪52的外齿52a与内齿轮36a啮合时,如图19所示,内杠杆53在图中的顺时针方向(向下旋转方向)上从中立位置旋转,使得在后上侧和前下侧上的两个进给爪52在旋转方向上与内齿轮36a成一体,以在顺时针方向上挤压和旋转内齿轮36a。然而,在内杠杆53在图中的顺时针方向上旋转之后,相对于其中内杠杆53返回到操作之前的初始位置的在相反方向上的旋转,在后上侧和前下侧上的两个进给爪52不与内齿轮36a成一体,如图22所示,并且返回到操作之前的初始位置,同时在旋转方向上在内齿轮36a上滑动。
144.另一方面,如图17所示,当在前上侧和后下侧上的两个进给爪52的外齿52a与内齿轮36a啮合时,如图24所示,内杠杆53在图中的逆时针方向(向上旋转方向)上从中立位置旋转,使得在前上侧和后下侧上的两个进给爪52在旋转方向上与内齿轮36a成一体,以在逆时针方向上挤压和旋转内齿轮36a。然而,在内杠杆53在图中的逆时针方向上旋转之后,相对于其中内杠杆53返回到操作之前的初始位置的在相反方向上的旋转,在前上侧和后下侧上的两个进给爪52不与内齿轮36a成一体,如图27所示,并且返回到操作之前的初始位置,同时在旋转方向上在内齿轮36a上滑动。
145.利用上述构造,四个进给爪52能够以在内杠杆53的任一旋转方向上从中立位置挤压和旋转所述旋转传递板36的方式进给所述旋转传递板36。当内杠杆53从内杠杆53在任一方向上旋转到的位置返回到中立位置时,四个进给爪52将内杠杆53返回到操作之前的初始位置,同时将旋转传递板36留在旋转传递板36被挤压和旋转到的位置。
146.如图19所示,当内杠杆53在顺时针方向(向下旋转方向)上从中立位置旋转时,四个进给爪52中的前上侧和后下侧上的两个进给爪52从内齿轮36a脱开并保持在该状态。此外,如图24所示,当内杠杆53在图中的逆时针方向(向上旋转方向)上从中立位置旋转时,在后上侧和前下侧上的两个进给爪52与内齿轮36a脱开并保持在该状态。
147.利用这种构造,当内杠杆53从内杠杆53在任一方向上旋转到的位置返回到中立位置时,用于限制内杠杆53的移动的两个进给爪52不阻碍内杠杆53的返回移动。具体地,如图19所示,当内杠杆53在图中的顺时针方向(向下旋转方向)上从中立位置旋转时,在前上侧和后下侧上的两个进给爪52被压靠在盖24的对应的骑跨部分24c的边缘上,并且被旋转以与内齿轮36a脱开。当内杠杆53在上述方向上操作时,在前上侧和后下侧上的两个进给爪52骑跨在对应的骑跨部分24c上,并且保持其中在前上侧和后下侧上的两个进给爪52与内齿轮36a脱开的状态。
148.另一方面,如图26所示,当内杠杆53在图中的逆时针方向(向上旋转方向)上从中立位置旋转时,在后上侧和前下侧上的两个进给爪52被压靠在盖24的对应的骑跨部分24c的边缘上,并且被旋转以与内齿轮36a脱开。当内杠杆53在上述方向上操作时,在后上侧和前下侧上的两个进给爪52骑跨在对应的骑跨部分24c上,并且保持其中在后上侧和前下侧上的两个进给爪52与内齿轮36a脱开的状态。
149.这里,如图17所示,在前上侧和后下侧上的两个进给爪52的外齿52a在外齿52a从内齿轮36a的齿偏移半节距的位置中与内齿轮36a的齿啮合。类似地,在后上侧和前下侧上的两个进给爪52的外齿52a在外齿52a从内齿轮36a的齿偏移半节距的位置中与内齿轮36a的齿啮合。利用这种构造,当外齿52a和内齿轮36a彼此啮合时,在进给爪52的外齿52a和内齿轮36a之间可能出现的在旋转方向上的反冲减小到很小。
150.当内杠杆53在图中的顺时针方向(向下旋转方向)上旋转时,在前上侧和后下侧上的两个进给爪52从初始阶段开始在顺时针方向上挤压和旋转内齿轮36a。然而,当内杠杆53在图中的逆时针方向(向上旋转方向)上旋转时,在后上侧和前下侧上的两个进给爪52在初始阶段不对内齿轮36a施加在逆时针方向上挤压和旋转内齿轮36a的力,而是在旋转进行到一定程度后在逆时针方向上挤压和旋转内齿轮36a。
151.其原因是,旋转传递板36和输出板75之间的联接(稍后将描述)是这样的联接,其中,在初始中立位置,旋转传递板36和输出板75从在一侧上的旋转被释放,并且旋转传递板36和输出板75在另一侧上一体地旋转。也就是说,如以上参照图17、图30和图31所述,当内杠杆53处于初始中立位置时,旋转传递板36设置在相对于输出板75在图中的逆时针方向上从挤压部分36d通过扭簧71的偏压力挤压板簧73的挤压件73a(以便将板簧73的配合件73c配合到盖24的配合孔24j中)的位置偏离的位置。
152.然后,如图19、图32和图33所示,旋转传递板36相对于输出板75的初始相对旋转被允许,以便利用挤压部分36d在轴向方向(向左方向)上挤压板簧73的挤压件73a,并且通过在顺时针方向(向下旋转方向)上从中立位置旋转内杠杆53的操作来释放锁定。另一方面,
如图24、图37和图38所示,当内杠杆53在图中的逆时针方向(向上旋转方向)上从中立位置旋转时,旋转传递板36从初始阶段开始就在旋转方向上与输出板75成一体,因为不需要释放锁定。
153.如图9等所示,旋转传递板36由基本上圆盘形的构件形成,该构件的表面面向座椅宽度方向。旋转传递板36在外周边部分上形成有内齿轮36a。内齿轮36a被半冲压成在轴向方向(向右方向)上挤出成基本上圆柱形的形状。旋转传递板36在其圆盘部分的中心部分(中心轴线c穿过的部分)中形成有中心孔36b。中心孔36b以圆孔形状在轴向方向上穿透中心部分。
154.构成输出轴22的轴向中间部分的外齿轮形第二花键22e从左侧插入中心孔36b中,从而可相对地旋转。中心孔36b具有略大于输出轴22的第二花键22e的形状的圆孔形状,并且第二花键22e在中心孔36b内部相对地旋转。
155.中心孔36b在圆周方向上的一个位置中在内圆周表面上形成有钩部分36c。钩部分36c径向向内突出。开口环形扭簧71被钩在钩部分36c和稍后将描述的输出板75的花键孔75c的凸部分之间。扭簧71将偏压力施加到输出板75,使得输出板75相对于旋转传递板36在图中的顺时针方向上持续地旋转。
156.如图9等所示,旋转传递板36在圆盘部分的圆周方向上的三个位置中形成有细长孔36e。细长孔36e在轴向方向上以围绕中心轴线c画出的弧形延伸的形状穿透圆盘部分。细长孔36e并排地布置,并且在同一圆的位置中在圆周方向上延伸相同的长度。接合销75d从输出板75的圆盘部分的圆周方向上的三个位置以圆销形状向右突出,其从左侧配合到对应的细长孔36e中,并且与细长孔36e接合,从而能够在旋转方向上滑动。
157.通过上述接合,旋转传递板36和输出板75被组装成在接合销75d在细长孔36e内部可滑动的范围内相对于彼此可旋转。如图17所示,当内杠杆53处于初始中立位置时,旋转传递板36和输出板75被保持在旋转位置,在该旋转位置,接合销75d被钩在内杠杆53和输出板75之间的扭簧71的偏压力压靠在图中的顺时针侧上的细长孔36e的端部部分上。
158.通过上述抵接,当旋转传递板36被内杠杆53从中立位置沿图9中的顺时针方向(向下旋转方向)旋转时,旋转传递板36相对于输出板75旋转到其中接合销75d压靠在图中的逆时针侧上的细长孔36e的端部部分上的位置。旋转传递板36以这样的方式旋转,即输出板75通过旋转在顺时针方向上从其中接合销75d压靠在图中的逆时针侧上的细长孔36e的端部部分的位置被一体地拉动。
159.当旋转传递板36被内杠杆53从中立位置沿图9中的逆时针方向(向上旋转方向)旋转时,接合销75d抵靠在图中的顺时针侧上的细长孔36e的端部部分上,使得旋转传递板36以这样的方式旋转,即输出板75从初始阶段开始在逆时针方向上被一体地拉动。
160.旋转传递板36在外周边部分处形成有挤压部分36d。挤压部分36d从旋转传递板36的圆周方向上的两个位置径向向外突出。如图19和图32所示,当旋转传递板36相对于输出板75在图中的顺时针方向(向下旋转方向)上旋转时,挤压部分36d骑跨在板簧73的挤压件73a上,并且在轴向方向(向左方向)上挤压挤压件73a。
161.如图9等所示,输出板75由基本上圆盘形的构件形成,该构件的表面面向座椅宽度方向。输出板75在其外周边部分的圆周方向上的一个位置中形成有闩锁部分75a。闩锁部分75a被钩住以在轴向方向上夹住板簧73的外周边部分的对应部分。输出板75还在外周边位
置中形成有夹紧件75b,该外周边位置与输出板75的闩锁部分75a在圆周方向上的位置对称。夹紧件75b在轴向方向(向右方向)上以弯曲形状延伸,并且在圆周方向上并排地布置在两个位置中。
162.夹紧件75b在其中稍后将描述的形成在板簧73上的两个爪形配合件73c在圆周方向上从两侧被共同夹紧的状态下支撑这两个爪形配合件73c。输出板75可以通过闩锁部分75a的钩住和夹紧件75b的支撑来防止板簧73在圆周方向上旋转,并且配合件73c的形成区域可以在轴向方向上弯曲,就像具有作为支点的闩锁部分75a的悬臂支撑梁的弯曲一样。
163.输出板75在圆盘部分的中心部分(中心轴线c穿过的部分)中形成有花键孔75c。花键孔75c具有在轴向方向上穿透中心部分的内齿轮的形式。构成输出轴22的轴向中间部分的外齿轮形第二花键22e以从左侧一体地配合到花键孔75c的状态插入花键孔75c中。通过上述配合,输出板75以在旋转方向上与输出轴22成一体的状态联接到输出轴22。
164.输出板75在圆盘部分的圆周方向上的三个位置中形成有接合销75d。接合销75d以圆销形状向右突出。接合销75d被组装到形成在旋转传递板36的圆盘部分中的对应细长孔36e中。具体功能的描述将被省略,因为它像上文所述那样。板簧73的具体构造将在稍后描述的防滑移单元d的详细描述中详细地描述。
165.接下来,将参照图10、图12等描述构成锁定单元b的四个棘爪32和旋转板37的构造。四个棘爪32中的每一个由臂形构件形成,该构件的表面面向座椅宽度方向。每个棘爪32形成有中心孔32b,该中心孔32b在轴向方向上以圆孔形状穿透棘爪32的基部端部部分。形成在中间基部25上的轴销25b中的每一个从左侧配合到对应的中心孔32b中,使得棘爪32可旋转地联接到轴销25b。
166.如图18所示,四个棘爪32并排地布置在中间基部25上,并且在前后方向和上下方向中的每一个上成对地构成。在四个棘爪32中,在上下方向上布置的两个棘爪32中的每一个具有其臂在图中的逆时针方向上从旋转中心(轴销25b)延伸的形状。在前后方向上布置的剩余两个棘爪32中的每一个具有其臂在图中的顺时针方向上从旋转中心(轴销25b)延伸的形状。
167.四个棘爪32在其臂的顶端部分处形成有外齿32a。外齿32a可以与旋转板37的内齿轮37a啮合。扭簧55中的每一个被钩在四个棘爪32中一对上和前棘爪32中对应的一个与一对下和后棘爪32中对应的一个之间。
168.前扭簧55设置在其中其一个端部和另一个端部在偏压方向上分别抵靠上棘爪32和前棘爪32的状态,在偏压方向上,回弹力被施加到上棘爪32和前棘爪32。后扭簧55设置在其中其一个端部和另一个端部在偏压方向上分别抵靠下棘爪32和后棘爪32的状态,在偏压方向上,回弹力被施加到下棘爪32和后棘爪32。
169.通过组装扭簧55,如图18所示,棘爪32被持续挤压并围绕对应的旋转中心(轴销53d)径向向外旋转,并且棘爪32的外齿32a保持在与旋转板37的内齿轮37a啮合的状态。在四个棘爪32中,由外齿32a施加到旋转板37的内齿轮37a的啮合力在一对上和下棘爪32与一对前和后棘爪32之间是不同的。
170.具体地,两个上和下棘爪32通过将外齿32a与内齿轮37a啮合来防止旋转板37在图中的顺时针方向(向下旋转方向)上旋转。然而,当旋转板37在图中的逆时针方向(向上旋转方向)上旋转时,即使两个上和下棘爪32的外齿32a与内齿轮37a啮合,如图26所示,两个上
和下棘爪32也在内齿轮37a上滑动并释放旋转板37的旋转。
171.另一方面,如图18所示,两个前和后棘爪32通过将外齿32a与内齿轮37a啮合来防止旋转板37在图中的逆时针方向(向上旋转方向)上旋转。然而,当旋转板37在图中的顺时针方向(向下旋转方向)上旋转时,即使两个前和后棘爪32的外齿32a与内齿轮37a啮合,如图21所示,两个前和后棘爪32也在内齿轮37a上滑动并释放旋转板37的旋转。
172.当内杠杆53在顺时针方向(向下旋转方向)上从图19所示的中立位置旋转时,四个棘爪32处于以下状态。也就是说,如图20所示,两个上和下棘爪32通过旋转被控制板56从内齿轮37a脱开,并保持在这种状态。另一方面,两个前和后棘爪32保持在与内齿轮37a啮合的状态。因此,四个棘爪32进入其中旋转板37在图中的顺时针方向(向下旋转方向)上的旋转可以被释放的状态(参见图21)。
173.在旋转板37在图中的顺时针方向上旋转之后,当内杠杆53的操作返回到图22所示的中立位置时,在四个棘爪32中与内齿轮37a啮合的两个前和后棘爪32防止旋转板37在图中的逆时针方向上旋转,并将旋转板37保持在图23所示的固定位置。当内杠杆53(参见图22)的操作返回到中立位置时,控制板56的旋转返回到初始位置。因此,如图23所示,两个上和下棘爪32返回到与内齿轮37a啮合的初始状态。
174.另一方面,当内杠杆53在逆时针方向(向上旋转方向)上从图24所示的中立位置旋转时,四个棘爪32处于以下状态。也就是说,如图25所示,两个前和后棘爪32通过旋转被控制板56从内齿轮37a脱开,并保持在这种状态。另一方面,两个上和下棘爪32保持在与内齿轮37a啮合的状态。因此,四个棘爪32进入其中旋转板37在图中的逆时针方向(向上旋转方向)上的旋转可以被释放的状态(参见图26)。
175.在旋转板37在图中的逆时针方向上旋转之后,当内杠杆53的操作返回到图27所示的中立位置时,在四个棘爪32中与内齿轮37a啮合的两个上和下棘爪32防止旋转板37在图中的顺时针方向上旋转,并将旋转板37保持在图28所示的固定位置。当内杠杆53(参见图27)的操作返回到中立位置时,控制板56的旋转返回到初始位置。因此,如图28所示,两个前和后棘爪32返回到与内齿轮37a啮合的初始状态。
176.如图10、图12等所示,旋转板37由基本上圆盘形的构件形成,该构件的表面面向座椅宽度方向。旋转板37在外周边部分上形成有内齿轮37a。内齿轮37a被半冲压成在轴向方向(向右方向)上挤出成基本上圆柱形的形状。内齿轮37a在其内圆周表面上形成有在整个圆周上为环形形状的内齿。内齿可以与四个棘爪32的外齿32a啮合。
177.旋转板37还在圆盘部分37b的中心部分(中心轴线c穿过的部分)中形成有中心孔37c。中心孔37c以圆孔形状在轴向方向上穿透中心部分。构成输出轴22的轴向中间部分的圆柱形第二轴部分22d可旋转地配合到中心孔37c(参见图7和图8)中。
178.在轴向方向(向左方向)上突出的太阳齿轮37d围绕旋转板37的中心孔37c形成。当输出轴22设置在太阳齿轮37d的中心孔37c中时,太阳齿轮37d设置在组装到输出轴22的中间部分的行星齿轮架62的三个行星齿轮63之间,并且齿轮联接到行星齿轮63以传递动力。
179.因此,当三个行星齿轮63伴随输出轴22的旋转而旋转时,太阳齿轮37d接收旋转驱动力的传递并旋转。具体地,太阳齿轮37d通过以啮合的齿轮比增加三个行星齿轮63在本体基部23的内齿轮23e中旋转的速度而旋转。
180.接下来,将参照图10、图12等描述构成增速单元u的行星齿轮架62和三个行星齿轮
63的构造。构成增速单元u的旋转板37的具体构造和功能如上所述。
181.行星齿轮架62由基本上环形的构件形成,该构件的表面面向座椅宽度方向。行星齿轮架62在中心部分(中心轴线c穿过的部分)中形成有花键孔62a。花键孔62a具有内齿轮的形式并且在轴向方向上穿透中心部分。
182.构成输出轴22的轴向中间部分的外齿轮形第一花键22c从左侧插入花键孔62a中,并且在旋转方向上一体地配合到花键孔62a。通过上述配合,行星齿轮架62以在旋转方向上与输出轴22成一体的状态联接到输出轴22。
183.行星齿轮架62在环板上的圆周方向上的三个位置中形成有轴销62b。轴销62b在轴向方向(向右方向)上以圆销形状突出。三个行星齿轮63从右侧配合到对应的轴销62b,并且可旋转地联接到轴销62b。
184.三个行星齿轮63中的每一个行星齿轮是基本上圆盘形的外齿轮,其表面面向座椅宽度方向。三个行星齿轮63中的每一个形成有中心孔63b,该中心孔63b在轴向方向上以圆孔形状穿透行星齿轮63的中心部分。行星齿轮架62的轴销62b中的每一个从右侧配合到对应的中心孔63a中,使得三个行星齿轮63可旋转地联接到轴销62b。
185.行星齿轮63通过经由行星齿轮架62和输出轴22组装到本体基部23而设置在与本体基部23的内齿轮23e啮合的状态(参见图13等)。作为上述组装的结果,当输出轴22在任一方向上旋转时,行星齿轮63绕转,同时沿着本体基部23的内齿轮23e在对应的旋转方向上在其自身的轴线上旋转。
186.接下来,将参照图10、图12等描述构成摩擦产生单元g的摩擦环57和控制件58的构造。摩擦环57由开口环构件形成。摩擦环57配合到旋转板37的外周边部分。摩擦环57的两个端部部分57a倾斜地弯曲,以朝向径向外侧以山形彼此接近。
187.控制件58由配合在摩擦环57的端部部分57a之间的基本上截头三角形的柱状构件形成。控制件58被夹在摩擦环57的端部部分57a之间。控制件58设置成这样的状态,其中形成在控制件58的左侧表面中并凹陷成在径向方向上以条形形状延伸的形状的滑动凹槽58a从右侧配合到形成在本体基部23上的导向突起23g。
188.此外,如图10等所示,控制件58设置成在这样的状态中,其中,从控制件58的右侧表面突出的圆形销状接合销58b从左侧插入沿着控制板56的外周边部分形成的骑跨孔56h中。骑跨孔56h具有以围绕控制板56的中心轴线c画出的弧形延伸的形状。骑跨孔56h经由在图10所示逆时针侧上的骑跨孔56h的端部部分处的倾斜接头与释放孔56g连通。骑跨孔56h具有略小的直径,并且在图中的逆时针方向上以同心弧形延伸。
189.如图17所示,当与控制板56一体地形成的外杠杆41处于中立位置时,控制件58的接合销58b位于在图中的逆时针侧上的控制板56的骑跨孔56h的端部部分处。在这种状态下,控制件58相对于本体基部23径向向外挤出,摩擦环57的两个端部部分57a之间的宽度通过截头三角形柱状形状的两个倾斜表面而扩大,从而释放其中摩擦环57压靠在旋转板37上的状态。
190.如图19所示,当外杠杆41在顺时针方向(向下旋转方向)上从中立位置旋转时,控制件58的接合销58b从控制板56的骑跨孔56h被拉入释放孔56g中,并且相对于本体基部23被径向向内拉动。因此,控制件58释放其中摩擦环57的端部部分57a之间的宽度扩大的状态。结果,摩擦环57被弹力压靠在旋转板37的外周边部分上,并且滑动摩擦阻力被施加到旋
转板37的旋转上。
191.具体地,在控制件58中,在外杠杆41在图中的顺时针方向(向下旋转方向)上旋转并且两个棘爪32从旋转板37的内齿轮37a脱开之前,接合销58b被拉入控制板56的释放孔56g中,如图20所示。然后,当外杠杆41进一步在图中的顺时针方向(向下旋转方向)上旋转时,两个棘爪32从旋转板37的内齿轮37a脱开。
192.利用这种构造,有可能在摩擦力被施加到接收座椅1的重量的输出轴22之后解锁输出轴22,并且有可能在其中座椅1的重量不太可能被施加的状态下安静地释放锁定。在锁定被释放之后,输出轴22可以在输出轴22平滑地向下旋转的方向(图中的顺时针方向)上旋转,同时保持其中摩擦力被施加到输出轴22的状态。
193.另一方面,如图24所示,当外杠杆41在逆时针方向(向上旋转方向)上从中立位置旋转时,控制件58的接合销58b在控制板56的骑跨孔56h中滑动。为此,控制件58被保持在相对于本体基部23被径向向外挤出的状态,并且摩擦环57被从压靠在旋转板37上释放。因此,当外杠杆41在逆时针方向(向上旋转方向)上从中立位置旋转时,没有摩擦力从摩擦环57施加到旋转板37。
194.接下来,将参照图9至图12等描述控制板56的构造。控制板56整体上具有双内环板和外环板形状,其表面面向座椅宽度方向。在控制板56中,在内周边侧上的环板和在外周边侧上的环板通过联接部分56c在圆周方向上的两个位置中联接。控制板56具有这样的形状,在该形状中,在内周边侧上的环板经由联接部分56c相对于在外周边侧上的环板偏移到左侧。
195.控制板56在中心部分(中心轴线c穿过的部分)中形成有中心孔56a。中心孔56a以圆孔形状在轴向方向上穿透中心部分。构成输出轴22的轴向中间部分的圆柱形第二轴部分22d可旋转地配合到中心孔56a(参见图7和图8)中。
196.控制板56在圆周方向上的两个位置中的外周边侧上的环板的外周边部分中形成有插入凹槽56d。插入凹槽56d径向向内凹陷。从外杠杆41向左延伸的臂41c从右侧配合到对应的插入凹槽56d中。因此,控制板56以在旋转方向上与外杠杆41成一体的状态联接到外杠杆41(参见图18)。
197.控制板56在圆周方向上的四个位置中的内周边侧上的环板的外周边部分处形成有钩部分56b。钩部分56b以爪形径向向外凸出。如图20和图25所示,当控制板56在任一方向上旋转时,钩部分56b被压靠在形成在四个棘爪32的内周边部分上的对应爪部分上,并且被操作以将爪部分从旋转板37的内齿轮37a脱开。
198.如图10等所示,骑跨孔56h和释放孔56g形成在控制板56的外周边侧上的环板的外周边部分中。骑跨孔56h和释放孔56g的具体构造和功能如上所述。
199.如图10、图12等所示,输出轴22包括从左侧起并排地布置在同一轴线上的小齿轮22a、第一轴部分22b、凸缘22h、第一花键22c、第二轴部分22d、第二花键22e、第三轴部分22f和第四轴部分22g。输出轴22的部分到其他构件的联接如上所述。输出轴22具有两端支撑结构,其中第二轴部分22d配合到本体基部23的中心孔23c中以被可旋转地支撑,并且第四轴部分22g配合到盖24的中心孔24a中以被可旋转地支撑。
200.接下来,将参照图9至图12等描述构成防滑移单元d的板簧73的构造。构成防滑移单元d的输出板75的具体构造和功能如上所述。
201.如图9等所示,板簧73由基本上环形的构件形成,该构件的表面面向座椅宽度方向。板簧73在环板的外周边部分处在圆周方向上的两个位置中形成有挤压件73a。挤压件73a以直角弯曲并在轴向方向(向右方向)上突出。挤压件73a中的每一个在突出顶部的端表面上具有倾斜表面73b(参见图30)。倾斜表面73b倾斜以减小在图中的逆时针方向上的突起。
202.板簧73还在与板簧73被输出板75的闩锁部分75a钩住的位置在圆周方向上对称的位置中形成有配合件73c。配合件73c以直角弯曲,并且在轴向方向(向右方向)上从内周边缘突出,并且在圆周方向上并排地布置在两个位置中。配合件73c在圆周方向上彼此间隔开。配合件73c中的每一个在突出顶部的端表面上具有倾斜表面73d(参见图31)。倾斜表面73d倾斜以减小在图中的逆时针方向上的突起。
203.板簧73还在圆周方向上的两个位置中形成有挤压部分73e,其中在板簧73被输出板75的闩锁部分75a钩住的位置中的内周边部分被夹在挤压部分73e中。挤压部分73e在圆周方向上以悬臂形状彼此相对延伸。挤压部分73e中的每一个具有延伸的中间部分以曲柄形状向左弯曲的形状。挤压部分73e中的每一个在其延伸顶部上具有压靠输出板75的外周边部分的右侧表面的端部部分。
204.通过上述组装,用于向右挤压板簧73的弹力被施加到板簧73,挤压部分73e压靠作为支点的输出板75。如图17所示,当内杠杆53处于初始中立位置时,板簧73保持在其中挤压件73a和配合件73c以板簧73被作为支点的闩锁部分75a钩住的位置向右突出的状态(参见图30和图31)。
205.通过上述突起,如图31所示,板簧73的配合件73c配合到盖24的对应配合孔24j中。因此,板簧73锁定一体地联接到板簧73的输出板75和输出轴22在向下旋转方向(图中的向左方向)上的移动。然而,由于配合件73c中的每一个的倾斜表面73d抵靠对应配合孔24j的内周边表面,板簧73允许输出板75和输出轴22在向上旋转方向(图中的向右方向)上移动。稍后将描述允许该移动的操作。
206.当外杠杆41在图19所示的顺时针方向(向下旋转方向)上从图17所示的中立位置旋转并且旋转传递板36在图19所示的顺时针方向上旋转时,板簧73释放锁定状态。具体地,通过旋转传递板36的旋转,形成在旋转传递板36上的挤压部分36d骑跨在板簧73的挤压件73a上,并且向左挤压挤压件73a(参见图32)。
207.具体地,旋转传递板36的挤压部分36d在板簧73的挤压件73a的倾斜表面73b上滑动,并且骑跨在挤压件73a的右端表面上。当挤压件73a通过上述骑跨被向左挤压时,板簧73将配合件73c从盖24的对应配合孔24j向左拉动(参见图33)。因此,输出板75和输出轴22在向下旋转方向(图中的向左方向)上的锁定状态被释放。
208.上述板簧73的解锁在伴随外杠杆41在向下旋转方向上的旋转的棘爪32的解锁之前执行。利用这种构造,有可能适当地防止由于棘爪32的在先释放而导致过量的载荷施加到板簧73的配合件73c和盖24的配合孔24j之间的配合部分。
209.然后,通过在执行板簧73的上述解锁之后外杠杆41的向下旋转,参照图9等描述的旋转传递板36的细长孔36e的端部部分抵靠输出板75的对应接合销75d。因此,输出板75在向下旋转方向上与旋转传递板36一体地旋转。
210.当在向下旋转期间从上方向座垫3施加过量载荷时,超过摩擦环57的摩擦力的向
下旋转方向上的过量载荷可能被施加到输出轴22。如图34所示,当这种过量载荷被施加到输出轴22时,与输出轴22成一体的输出板75可能滑移以在旋转传递板36之前在向下旋转方向上旋转。
211.然而,当这种滑移发生时,板簧73的配合件73c伴随输出板75的在先旋转而从被旋转传递板36的挤压部分36d挤压中释放(参见图35)。因此,如图36所示,板簧73的配合件73c再次通过弹力配合到盖24的对应配合孔24j中。通过上述配合,输出板75和输出轴22在向下旋转方向上的移动被锁定。因此,可以在早期阶段防止当输入过量载荷时输出轴22的滑移。
212.另一方面,当外杠杆41在图24所示的逆时针方向(向上旋转方向)上从图17所示的中立位置旋转并且旋转传递板36在逆时针方向上旋转时,板簧73允许在逆时针方向上旋转。具体地,响应于在逆时针方向上的旋转,输出板75与旋转传递板36一体地旋转(参见图37)。因此,如图38所示,与输出板75一体地旋转的板簧73使配合到盖24的配合孔24j中的配合件73c在逆时针方向(图中的向右方向)上旋转。
213.通过上述旋转,板簧73的配合件73c在旋转方向(图中的向右方向)上将倾斜表面73d压靠在配合孔24j的内周边表面上。因此,板簧73的配合件73c克服由倾斜表面73d和配合孔24j的内周边表面之间的抵接引起的反作用力而被向左挤压,并且从配合孔24j向左被释放。随着上述移动的进行,板簧73允许输出板75和输出轴22在向上旋转方向上移动。
214.{总结}
215.总的来说,根据第一实施例的座椅升降器装置10具有以下构造。在以下描述中,括号中的附图标记对应于上述实施例中描述的相应构造。
216.也就是说,座椅升降器装置(10)包括输出轴(22),该输出轴被构造成根据操作手柄(5)的旋转操作量升高和降低座椅(1)。座椅升降器装置(10)包括:支撑单元(s),其支撑输出轴(22)使得输出轴(22)可旋转;和输入单元(n),其可旋转地联接到支撑单元(s)并一体地联接到操作手柄(5)。座椅升降器装置(10)还包括:进给单元(a),其将输入单元(n)的旋转传递到输出轴(22);和锁定单元(b),其锁定输出轴(22)相对于支撑单元(s)的旋转。座椅升降器装置(10)还包括:摩擦产生单元(g),其设置在支撑单元(s)和构造成与输出轴(22)一起旋转的旋转构件(37)之间;和防滑移单元(d),其设置在输出轴(22)和进给单元(a)之间的动力传递路径中。
217.进给单元(a)是棘轮型的,将输入单元(n)从中立位置的双向旋转传递到输出轴(22),并且不将输入单元(n)返回中立位置的旋转传递到输出轴(22)。锁定单元(b)响应于输入单元(n)从中立位置旋转的操作解锁输出轴(22),并且响应于输入单元(n)返回中立位置的操作锁定输出轴(22)的旋转。
218.摩擦产生单元(g)响应于输入单元(n)在座椅(1)降低的方向上旋转的操作而在旋转构件(37)和支撑单元(s)之间施加摩擦力,从而停止由于座椅(1)的重量导致的输出轴(22)的在先旋转。防滑移单元(d)通过输入单元(n)从中立位置旋转的操作将进给单元(a)的旋转传递到输出轴(22)。当输入单元(n)在座椅(1)降低的方向上旋转并且输出轴(22)克服摩擦产生单元(g)的摩擦力在进给单元(a)之前旋转以滑移时,防滑移单元(d)响应于输出轴(22)的滑移通过弹力配合到支撑单元(s)以停止该滑移。
219.根据上述构造,当输入单元(n)在座椅(1)降低的方向上旋转时,锁定单元(b)解锁,并且输出轴(22)经由进给单元(a)在座椅(1)降低的旋转方向上被进给。此时,通过摩擦
产生单元(g)来防止输出轴(22)由于座椅(1)的重量而滑移。即使当超过摩擦产生单元(g)的摩擦力的向下旋转方向上的过量载荷从输出侧输入到输出轴(22)时,防滑移单元(d)也配合到支撑单元(s),从而防止滑移旋转。因此,当座椅(1)降低时,有可能适当地停止座椅(1)的滑移。
220.防滑移单元(d)在轴向方向上配合到支撑单元(s)。根据上述构造,防滑移单元(d)可以以相对节省空间的方式构造。
221.响应于进给单元(a)旋转到输出轴(22)不会由于输入单元(n)的旋转而发生滑移的位置的操作,处于配合到支撑单元(s)的状态的防滑移单元(d)克服弹力从配合到支撑单元(s)的状态被释放。根据上述构造,即使在防滑移单元(d)配合到支撑单元(s)之后,防滑移单元(d)也可以通过进给单元(a)旋转到其中不发生滑移的位置而返回到其中防滑移单元(d)可以再次起作用的状态。
222.即使当输入单元(n)处于中立位置时,防滑移单元(d)也通过弹力配合到支撑单元(s)。当输入单元(n)在座椅(1)降低的方向上旋转时,防滑移单元(d)克服弹力从配合到支撑单元(s)的状态被释放,从而允许输出轴(22)旋转。防滑移单元(d)具有倾斜表面(73d),并且当输入单元(n)在座椅(1)升高的方向上旋转时,通过倾斜表面(73d)抵靠支撑单元(s)而克服弹力从配合到支撑单元(s)的状态被释放,从而允许输出轴(22)旋转。
223.根据上述构造,即使当输入单元(n)处于中立位置时,也有可能防止输出轴(22)滑移。即使利用这种构造,防滑移单元(d)也可以避免阻碍输入单元(n)在座椅(1)升高的方向上旋转。
224.当输入单元(n)在座椅(1)降低的方向上从中立位置旋转时,在锁定单元(b)解锁输出轴(22)之前,防滑移单元(d)从配合到支撑单元(s)的状态被释放。根据上述构造,可以防止锁定单元(b)首先被释放,并且可以防止过量的载荷被施加到防滑移单元(d)。
225.{其它实施例}
226.尽管上面已经使用一个实施例描述了本公开的实施例,但是除了上述实施例之外,本公开可以以下面描述的各种形式实现。
227.1.本公开的座椅升降器装置不仅可以广泛应用于安装在除汽车之外的车辆(诸如铁路)上的座椅,还可以广泛应用于安装在除车辆之外的交通工具(诸如飞机或轮船)上的座椅。座椅升降器装置可以广泛应用于安装在诸如体育设施、剧院、音乐会场馆和赛事场馆的各种设施中的诸如看台和按摩座椅的非车辆座椅。
228.2.当输入单元处于中立位置并且当输入单元在升高座椅的方向上旋转时,摩擦产生单元可以减弱施加到旋转构件的压力,而不是释放压力。摩擦产生单元的压靠旋转构件的部分和旋转构件的被摩擦产生单元挤压的部分中的一个可以具有正方形形状或另一种不规则形状,而不是圆形形状。
229.除了以环绕方式从外周边侧压靠旋转构件之外,摩擦产生单元还可以从在旋转方向上的多个位置(例如,两个位置、三个位置或四个位置)单独压靠旋转构件。除了为了产生摩擦力而从内周边侧之外,摩擦产生单元还可以在推力方向上压靠旋转构件来产生摩擦力。除了旋转速度经由增速单元增加的构件(在第一实施例中描述的“旋转板37”)之外,摩擦产生单元向其施加摩擦力的旋转构件可以是与输出轴一体地旋转的构件(在第一实施例中描述的“旋转传递板36”或“输出板75”)。
230.3.防滑移单元可以在径向方向上配合到支撑单元。在输入单元处于中立位置的状态下,防滑移单元可以不配合到支撑单元。当输入单元在座椅降低的方向上从中立位置旋转时,防滑移单元和锁定单元中的任一个可以首先解锁,或者锁定单元可以首先解锁。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1