一种基于冗余传感器的工程车盲区监测预警系统及方法与流程
1.本发明涉及智能驾驶技术领域,更具体的说是涉及一种基于冗余传感器的工程车盲区监测预警系统及方法。
背景技术:
2.工程车具有车身“高、长、大”的特点,驾驶员驾驶过程中存在无法观测到的视觉盲区,从而发生骑车人或行人被卷入车底而造成伤亡的交通事故。特别地,车辆在转弯时存在内轮差和视野盲区,特别容易造成交通事故。资料显示,全球每年有50万例交通事故是盲区引起的,其中由于后视镜盲区造成的交通事故占30%。鉴于后视镜盲区交通事故的严重性和现有后视镜显示范围有限性,我们应从智能化入手对其综合性能对后视镜盲区问题进行优化提升。因此,需要一种盲区监测预警系统,对驾驶员进行驾驶辅助。研究表明,盲区监测预警系统可以有效提高车辆行车安全性。
3.当前,现有的商用车盲区监测方案,普遍使用了毫米波雷达方案。工程车多在工地作业,存在较多尘土、建筑物料、工人等。针对工程车作业环境的复杂性,单传感器无法实现功能的准确性。视觉类摄像机受尘土影响严重,雷达无法准确分辨目标物类别,容易将建筑物料识别为道路使用者产生误报。
技术实现要素:
4.针对现有技术中存在的问题,本发明的目的在于提供一种基于冗余传感器的工程车盲区监测预警系统及方法,通过使用多传感器融合的方式对工程车盲区进行监测,并进行相应算法的冗余性设计,有效的提高盲区监测的准确性和可靠性。
5.本发明为实现上述目的,通过以下技术方案实现:
6.一种基于冗余传感器的工程车盲区监测预警系统,包括:车载传感器、控制器、报警装置、摄像头和毫米波传感器;控制器分别与车载传感器、报警装置、摄像头和毫米波传感器连接;
7.车载传感器设置在工程车驾驶室内,用于采集本车行驶信息,并发送至控制器;摄像头和毫米波传感器设置在工程车的车头两侧,用于实时监测工程车周边的目标物信息;
8.控制器设置内工程车驾驶室内,用于根据本车行驶信息判断车辆行驶状态,根据车辆行驶状态计算盲区范围;通过预设算法对目标物信息进行融合,判断目标物是否在盲区范围内,并根据判断结果结合预设报警条件向报警装置发出报警指令;
9.报警装置设置在工程车驾驶室内,用于根据报警指令发出相应的报警信号。
10.进一步,本车行驶信息包括车速信号、方向盘转角信号、挡位信号和转向灯信号,所述目标物信息包括目标物的位置信号、速度信号和类型信号。
11.相应的,本发明还公开了一种基于冗余传感器的工程车盲区监测预警方法,包括:
12.控制器接收车载传感器发送的本车行驶信息,包括车速信号、方向盘转角信号、挡位信号、转向灯信号;
13.根据本车行驶信息,判断车辆行驶状态,并根据车辆行驶状态计算盲区范围;控制器接收毫米波传感器和摄像头发送的目标物信息,包括位置信号、速度信号、类型信号;
14.根据目标物信息判定目标物是否为有效目标;
15.若目标物为有效目标,采用预设算法对目标物信息进行融合,生成目标物信息融合结果;
16.判断目标物是否在盲区范围内,并根据预设报警条件启动报警装置进行分级预警。
17.进一步,所述根据本车行驶信息,判断车辆行驶状态,并根据车辆行驶状态计算盲区范围,包括:
18.根据方向盘转角信号,判断车辆行驶状态;
19.若车辆左转,将报警区域设为车身左侧的盲区范围,计算内轮差,以内轮差下弧线为分割线,将盲区范围分为前后两部分;
20.若车辆直行,将报警区域设为车身左右两侧的盲区范围;
21.若车辆右转,将报警区域设为车身右侧的盲区范围,计算内轮差,以内轮差下弧线为分割线,将盲区范围分为前后两部分。
22.进一步,所述内轮差下弧线通过以下过程生成:
23.通过以下公式计算得出内轮差δr:
[0024][0025]
其中,r1为左前轮的转弯半径,l为车身长度,d为车身宽度;
[0026]
根据以下公式得出左前轮的转弯角度θ:
[0027][0028]
假设当前车辆匀速行驶,根据内轮差δr和左前轮的转弯角度θ,拟合出内轮差下弧线。
[0029]
进一步,所述根据目标物信息判定目标物是否为有效目标,包括:
[0030]
如果当前摄像头工作正常,根据摄像头获取的目标物信息确定目标物;若目标物为行人、车辆或驾驶车辆的人,则目标物为有效目标;
[0031]
如果当前摄像头工作异常,根据毫米波传感器获取的目标物信息确定目标物;若目标物为动态物或由静变动的目标物,则目标物为有效目标。
[0032]
进一步,所述采用预设算法对目标物信息进行融合,生成目标物信息融合结果,具体为:
[0033]
采用基于联邦式卡尔曼滤波算法对目标物速度信息和位置信息进行融合,包括:
[0034]
通过以下公式组建离散化系统误差模型:
[0035]
[0036]
其中,为第i个传感器在k时刻的系统状态向量,z
k(i)
为第i个传感器在k时刻的量测向量,i=1表示摄像头的量测,i=2表示毫米波传感器的量测,表示第i个传感器在k-1时刻至k时刻的状态转移矩阵,表示第i个传感器在k-1时刻的系统状态向量,为第i个传感器在k-1时刻的系统噪声向量,为第i个传感器在k时刻的量测矩阵,为第i个传感器在k时刻的量测噪声向量;
[0037]
将两个传感器并联运行,进行时间更新和量测更新,得到误差写仿真p
k(i)
和状态估计值
[0038]
通过以下公式进行滤波器时间更新:
[0039][0040]
其中,为第i个传感器在时刻k-1到时刻k的预测均方差,表示第i传感器在时刻k-1到时刻k的预测状态估计,表示第i传感器在时刻k-1到时刻k的误差协方差阵,为的协方差;
[0041]
通过以下公式进行传感器的量测更新:
[0042][0043]
其中,为全局状态估计,为的协方差,为卡尔曼增益,为第i个传感器在k时刻的量测向量;
[0044]
通过以下公式进行故障检测:
[0045][0046]
其中,εk为测量值残差,zk为第i个传感器在k时刻的量测向量,h为量测矩阵,为时刻k-1到时刻k的预测状态估计;
[0047]
通过以下公式进行信息融合:
[0048][0049]
其中,为主滤波器中协方差矩阵,为融合后的状态估计,为传感器融合后的协方差矩阵;
[0050]
通过以下公式进行信息分配:
[0051][0052]
其中,γi为信息分配系数;
[0053][0054]
其中,γn=1,γi=1/n。
[0055]
进一步,所述判断目标物是否在盲区范围内,并根据预设报警条件启动报警装置进行分级预警,包括:
[0056]
若车辆直行且根据目标物信息融合结果确定目标物进入左右两侧盲区范围内,控制器向报警装置发出报警指令,通过报警装置对目标物所在的一侧发出一级报警信号;
[0057]
若车辆处于左转或右转状态,根据目标物信息融合结果确定目标物进入内轮差下弧线前部分的盲区范围内,控制器向报警装置发出报警指令,通过报警装置对目标物所在的一侧发出一级报警信号;
[0058]
若车辆处于左转或右转状态,根据目标物信息融合结果确定目标物进入内轮差下弧线后部分的盲区范围内,当判定有碰撞风险时,控制器向报警装置发出报警指令,通过报警装置对目标物所在的一侧发出一级报警信号;
[0059]
在满足上述发出一级报警信号条件下,若驾驶员打转向灯,控制器向报警装置发出报警指令,通过报警装置发出二级报警信号。
[0060]
进一步,所述碰撞风险根据碰撞时间ttc判定,计算方法如下:
[0061][0062]
其中,d目标物距离内轮差下弧线的距离,v为目标物行驶速度。
[0063]
对比现有技术,本发明有益效果在于:本发明提供了一种基于冗余传感器的工程车盲区监测预警系统及方法,首先,根据本车车身信息和运动信息,计算盲区范围;然后,通过控制器接收多传感器发送的目标物位置信息与速度信息,并进行融合处理;最后,判断目标物是否在盲区范围内,根据报警条件进行分级预警。本发明使用多传感器融合的方式进行工程车盲区的监测,当多传感器提供不同的目标物位置信息和速度信息时,采用滤波技
术有效融合多种信源,并对各传感器数据并联处理,独立维护车辆的信息观测,实现算法的冗余性设计,并提高其容错性和定位精度。
[0064]
本发明针对工程车工作环境复杂,工地中建筑物料、铁皮等目标物会增加其误警现象,过于颠簸路况会增加对传感器的伤害的工况特点,采用摄像头和雷达的方案,增加盲区监测预警系统的准确性和可靠性。本发明能够在提高工程车盲区行车安全的基础上,能够提高其预警的准确度,兼顾驾驶员的体验感。
[0065]
由此可见,本发明与现有技术相比,具有突出的实质性特点和显著的进步,其实施的有益效果也是显而易见的。
附图说明
[0066]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0067]
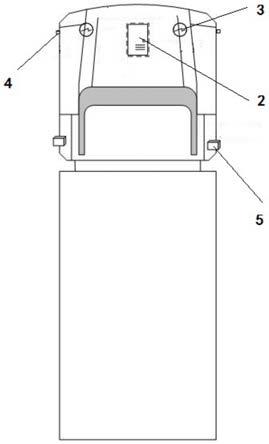
附图1是本发明实施例一的系统结构图。
[0068]
附图2是本发明实施例一的电气框图。
[0069]
附图3是本发明实施例二的方法流程图。
[0070]
附图4是本发明实施例三的方法流程图。
[0071]
图中,1为车载传感器;2为控制器;3为报警装置;4为摄像头;5为毫米波传感器。
具体实施方式
[0072]
下面结合附图对本发明的具体实施方式做出说明。
[0073]
实施例一
[0074]
如图1-2所示,本实施例公开了一种的基于冗余传感器的工程车盲区监测预警系统,包括:车载传感器1、控制器2、报警装置3、摄像头4和毫米波传感器5;控制器2分别与车载传感器1、报警装置3、摄像头4和毫米波传感器5连接.
[0075]
车载传感器设置1在工程车驾驶室内,用于采集本车行驶信息,并发送至控制器2。其中,本车行驶信息包括车速信号、方向盘转角信号、挡位信号和转向灯信号。
[0076]
摄像头4和毫米波传感器5设置在工程车的车头两侧,用于实时监测工程车周边的目标物信息。其中,目标物信息包括目标物的位置信号、速度信号和类型信号。
[0077]
控制器2设置内工程车驾驶室内,用于根据本车行驶信息判断车辆行驶状态,根据车辆行驶状态计算盲区范围;通过预设算法对目标物信息进行融合,判断目标物是否在盲区范围内,并根据判断结果结合预设报警条件向报警装置3发出报警指令。报警装置3设置在工程车驾驶室内,用于根据报警指令发出相应的报警信号。
[0078]
实施例二:
[0079]
基于实施例一,如图3所示,本实施例公开了一种基于冗余传感器的工程车盲区监测预警方法,包括如下步骤:
[0080]
s1:控制器接收车载传感器发送的本车行驶信息,包括车速信号、方向盘转角信号、挡位信号、转向灯信号。
[0081]
s2:根据本车行驶信息,判断车辆行驶状态,并根据车辆行驶状态计算盲区范围。
[0082]
首先,根据方向盘转角信号,判断车辆行驶状态。若车辆左转,将报警区域设为车身左侧的盲区范围,计算内轮差,以内轮差下弧线为分割线,将盲区范围分为前后两部分;若车辆直行,将报警区域设为车身左右两侧的盲区范围;若车辆右转,将报警区域设为车身右侧的盲区范围,计算内轮差,以内轮差下弧线为分割线,将盲区范围分为前后两部分。
[0083]
在本步骤中,通过以下公式计算得出内轮差δr:
[0084][0085]
其中,r1为左前轮的转弯半径,l为车身长度,d为车身宽度;
[0086]
根据以下公式得出左前轮的转弯角度θ:
[0087][0088]
假设当前车辆匀速行驶,根据内轮差δr和左前轮的转弯角度θ,拟合出内轮差下弧线。
[0089]
s3:控制器接收毫米波传感器和摄像头发送的目标物信息,包括位置信号、速度信号、类型信号。
[0090]
s4:根据目标物信息判定目标物是否为有效目标。
[0091]
如果当前摄像头工作正常,根据摄像头获取的目标物信息确定目标物;若目标物为行人、车辆或驾驶车辆的人,则目标物为有效目标。如果当前摄像头工作异常,根据毫米波传感器获取的目标物信息确定目标物;若目标物为动态物或由静变动的目标物,则目标物为有效目标。
[0092]
s5:若目标物为有效目标,采用预设算法对目标物信息进行融合,生成目标物信息融合结果。
[0093]
具体来说,若目标物为有效目标,采用基于联邦式卡尔曼滤波算法对目标物速度信息和位置信息进行融合,包括:
[0094]
通过以下公式组建离散化系统误差模型:
[0095][0096]
其中,为第i个传感器在k时刻的系统状态向量,z
k(i)
为第i个传感器在k时刻的量测向量,i=1表示摄像头的量测,i=2表示毫米波传感器的量测,表示第i个传感器在k-1时刻至k时刻的状态转移矩阵,表示第i个传感器在k-1时刻的系统状态向量,为第i个传感器在k-1时刻的系统噪声向量,为第i个传感器在k时刻的量测矩阵,为第i个传感器在k时刻的量测噪声向量;
[0097]
将两个传感器并联运行,进行时间更新和量测更新,得到误差写仿真p
k(i)
和状态估计值
[0098]
通过以下公式进行滤波器时间更新:
[0099][0100]
其中,为第i个传感器在时刻k-1到时刻k的预测均方差,表示第i传感器在时刻k-1到时刻k的预测状态估计,表示第i传感器在时刻k-1到时刻k的误差协方差阵,为的协方差;
[0101]
通过以下公式进行传感器的量测更新:
[0102][0103]
其中,为全局状态估计,为的协方差,为卡尔曼增益,为第i个传感器在k时刻的量测向量;
[0104]
通过以下公式进行故障检测:
[0105][0106]
其中,εk为测量值残差,zk为第i个传感器在k时刻的量测向量,h为量测矩阵,为时刻k-1到时刻k的预测状态估计;
[0107]
通过以下公式进行信息融合:
[0108][0109]
其中,为主滤波器中协方差矩阵,为融合后的状态估计,为传感器融合后的协方差矩阵;
[0110]
通过以下公式进行信息分配:
[0111][0112]
其中,γi为信息分配系数;
[0113][0114]
其中,γn=1,γi=1/n。
[0115]
s6:判断目标物是否在盲区范围内,并根据预设报警条件启动报警装置进行分级预警。
[0116]
若车辆直行且根据目标物信息融合结果确定目标物进入左右两侧盲区范围内,控制器向报警装置发出报警指令,通过报警装置对目标物所在的一侧发出一级报警信号。
[0117]
若车辆处于左转或右转状态,根据目标物信息融合结果确定目标物进入内轮差下弧线前部分的盲区范围内,控制器向报警装置发出报警指令,通过报警装置对目标物所在的一侧发出一级报警信号。
[0118]
若车辆处于左转或右转状态,根据目标物信息融合结果确定目标物进入内轮差下弧线后部分的盲区范围内,当判定有碰撞风险时,控制器向报警装置发出报警指令,通过报警装置对目标物所在的一侧发出一级报警信号。
[0119]
在满足上述发出一级报警信号条件下,若驾驶员打转向灯,控制器向报警装置发出报警指令,通过报警装置发出二级报警信号。
[0120]
其中,碰撞风险根据碰撞时间ttc判定,计算方法如下:
[0121][0122]
其中,d目标物距离内轮差下弧线的距离,v为目标物行驶速度。
[0123]
本实施例提供了一种基于冗余传感器的工程车盲区监测预警方法,首先,根据本车车身信息和运动信息,计算盲区范围;然后,通过控制器接收多传感器发送的目标物位置信息与速度信息,并进行融合处理;最后,判断目标物是否在盲区范围内,根据报警条件进行分级预警。本方法有效克服了工程车工作环境中,建筑物料、土堆、铁皮墙等造成的误警现象,以及工程车恶劣地工作环境对传感器影响较大的问题,增强了监测的冗余性,提高了容错性和定位精度。
[0124]
实施例三:
[0125]
基于上述实施例,如图4所示,本实施例还公开了一种基于冗余传感器的工程车盲区监测预警方法,包括以下步骤:
[0126]
第一步:根据本车车身信息和运动信息,计算盲区范围;
[0127]
第二步:控制器接收多传感器发送的目标物位置信息与速度信息,并进行融合处理;
[0128]
第三步:判断目标物是否在盲区范围内,根据报警条件进行分级预警。
[0129]
在第一步中,控制器可接收汽车总线发送的方向盘转角信号,结合控制器中开始写入的车身参数,计算盲区范围包括以下步骤:
[0130]
根据方向盘转角信号,判断车辆行驶状态。
[0131]
若车辆左转,车身右侧无碰撞风险,关闭车身右侧报警区域。报警范围为车身左侧范围,以内轮差下弧线为分割线,将报警区域分为前后两部分。
[0132]
若车辆直行,报警区域为车身左右两侧范围。
[0133]
若车辆右转,车身左侧无碰撞风险,关闭车身左侧报警区域。报警范围为车身右侧,以内轮差下弧线为分割线,将报警区域分为前后两部分。
[0134]
内轮差δr的计算方法如下:
[0135][0136]
其中,r1为左前轮的转弯半径,l为车身长度,d为车身宽度。
[0137]
根据方向盘转角,可得左前轮的转弯角度θ。
[0138][0139]
假设车辆匀速行驶,根据以上信息,拟合出内轮差下弧线。
[0140]
在第二步中,控制器接收多传感器发送的目标物位置信息与速度信息,并进行冗余处理包括以下步骤:
[0141]
本发明采用摄像头与毫米波雷达的方案,实时监测车辆左右两侧后视镜盲区目标信息,各传感器数据并联处理。通过故障诊断与系统重构决定各传感器是否参与融合。
[0142]
首先,需要过滤无效目标,以摄像头识别到的目标物为主,将行人、车辆、骑电动车的人、骑摩托车的人作为有效目标。若摄像头故障,则将毫米波雷达识别到的动态物和由动变静的目标物识别为有效目标。
[0143]
然后,基于联邦式卡尔曼滤波算法对目标物速度信息和位置信息进行融合。
[0144]
对应的离散化系统误差模型如下:
[0145][0146]
其中,为第i个传感器的系统状态向量,z
k(i)
为第i个传感器的量测向量,i=1表示摄像头的量测,i=2表示毫米波雷达的量测,表示k-1时刻至k时刻的状态转移矩阵,w
k-1
为系统噪声向量,为量测矩阵,为量测噪声向量。
[0147]
的协方差为r(i),的协方差为
[0148]
两个传感器器并联运行,进行时间更新和量测更新,得到误差写仿真p
k(i)
和状态估计值
[0149]
滤波器时间更新。
[0150][0151]
其中,为第i个传感器在时刻k-1到时刻k的预测均方差,表示第i传感器在时刻k-1到时刻k的预测状态估计,表示第i传感器在时刻k-1到时刻k的误差协方差阵
[0152]
传感器的量测更新:
[0153][0154]
其中,为全局状态估计。
[0155]
故障检测:
[0156][0157]
其中,εk为测量值残差。
[0158]
当发生故障时,εk会发生突变。
[0159]
信息融合:
[0160][0161]
其中,为主滤波器中协方差矩阵,为融合后的状态估计,为传感器融合后的协方差矩阵。
[0162]
信息分配:
[0163][0164]
其中,γi为信息分配系数。
[0165][0166]
其中,γn=1,γi=1/n。
[0167]
在第三步中,判断目标物是否在盲区范围内,根据报警条件进行分级预警,包括以下步骤:
[0168]
根据第一种车辆运动状态的判断结果。
[0169]
若车辆直行有目标物进入左右两侧盲区范围内,相应一侧发出一级报警。
[0170]
若车辆转弯时,目标物进入内轮差下弧线前部分范围内,系统相应一侧报警器发出一级报警。目标物进入内轮差下弧线后部分,且有碰撞风险时,系统相应一侧报警器发出一级报警。
[0171]
当满足一级报警条件下,若驾驶员打转向灯,系统发出二级报警。
[0172]
其中,碰撞风险可根据碰撞时间ttc判定,计算方法如下:
[0173][0174]
其中,d目标物距离内轮差下弧线的距离,v为目标物行驶速度。
[0175]
本实施例提供了一种基于冗余传感器的工程车盲区监测预警方法,能够有效提高盲区监测预警系统在工程车上的可靠性。由于工程车工作环境复杂,工地中建筑物料、铁皮墙和土堆会增加其误警现象,过于颠簸路况会增加对传感器的损坏性。因此,本方法从这一角度出发,采用摄像头和雷达的方案,增加盲区监测预警系统的准确性和可靠性。使得本发明在提高工程车盲区行车安全的基础上,能够提高其预警的准确度,兼顾驾驶员的体验感。
[0176]
结合附图和具体实施例,对本发明作进一步说明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所限定的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1