用于自动代客泊车的方法和设备与流程
1.本发明涉及一种用于自动代客泊车的方法,本发明还涉及一种用于自动代客泊车的设备。
背景技术:
2.随着智能驾驶技术的推动,自动代客泊车已成为趋势。目前车辆用户只需将车辆驾驶至指定位置后下车,然后通过车辆系统与停车场管理系统的交互或通过环境感知来实现从起点位置到停车位的自动泊车过程。一般地,自动泊车过程的起点默认为停车场的栏杆前或目标停车位周围的固定区域,该起点虽然已经位于用户想要前往的目的地附近,但用户在离开车辆后仍需步行一段距离才能够到达目的地。
3.为此,现有技术中提出一种控制自动驾驶车辆的方法,在该方法中允许用户自行定义上、下车地点并将其通知给位于停车场中的自动驾驶车辆,于是,自动驾驶车辆将按照用户指定位置来接送用户。这种方案虽然允许对固定上、下车地点的修改,但是这种修改依赖于用户的自定义,在缺乏用户输入的情况下车辆仍无法自适应地执行上下车位置优化。
4.还已知一种车辆控制方法,当发现用户将车辆停放在不可停放的位置时(例如将车停在了公司入口处),车辆会自动移位到自车专用停车位上。然而在此,系统仅局限于对这种非指定停放行为进行合理性评估,而并不会自主学习和记忆这种行为,因此对于用户来说,整个自动泊车过程仍不够人性化。
5.在这种背景下,期待提供一种改进的自动代客泊车方案,旨在进一步为车辆用户节省时间开销并提高舒适性。
技术实现要素:
6.本发明的目的在于提供一种用于自动代客泊车的方法和一种用于自动代客泊车的设备,以至少解决现有技术中的部分问题。
7.根据本发明的第一方面,提出一种用于自动代客泊车的方法,所述方法包括以下步骤:
8.s1:获取乘客在历史落客点下车之后的步行路线终点,所述历史落客点位于车辆的直至目标停车位的驾驶路线上;
9.s2:基于步行路线确定新落客点;以及
10.s3:控制车辆在所述新落客点处停车以让乘客下车并从新落客点将车辆自动引导至目标停车位。
11.本发明尤其包括以下技术构思:通过在确定落客点时充分考虑乘客的步行路线终点,有利地限制了乘客下车后为达目的地仍需步行的距离。由此,一方面节省了用户日常通勤的时间开销,另一方面也为行动困难的用户(例如残疾人或老年人)提供了更安全、便捷的服务。
12.可选地,所述步骤s1包括:
13.在乘客在历史落客点下车之后借助车载环境传感器探测乘客的步行路线终点;和/或
14.在乘客在历史落客点下车之后借助车载环境传感器探测乘客的步行方向信息并基于所述步行方向信息估计步行路线终点。
15.由此,实现以下技术优点:借助这种观察数据,即使用户离开车辆,其对于车辆感知系统而言也并未完全“消失”。在这种情况下,不需要用户主动将期望下车位置告知车辆,而是以一种潜在方式了解用户需求并完成系统优化,极大地改善了用户体验。
16.可选地,基于步行方向信息估计步行路线终点包括:
17.在到达历史落客点之前预先开启车载环境传感器;
18.借助车载环境传感器识别车辆在到达历史落客点之前经过的一个或多个潜在入口特征;以及
19.基于乘客在历史落客点下车之后的步行方向信息选择所述潜在入口特征中的一个作为步行路线终点。
20.由此,实现以下技术优点:由于用户的最终步行目的地通常位于下车位置附近,因此如果能够提前掌握该区域中的出入口信息,结合用户的步行方向将会更准确地定位出步行路线终点。
21.可选地,所述步骤s1包括:在乘客在历史落客点下车之后,根据从建筑物的通信设备和/或乘客携带的通信设备接收到的位置信号确定步行路线终点。
22.由此,实现以下技术优点:在充分利用v2x通信机制的情况下,能够进一步提高用户步行路线终点的判定准确性。
23.可选地,所述步骤s2包括:
24.将步行路线终点直接确定为新落客点;和/或
25.基于天气条件、步行路线终点周围的交通情况和/或车辆的能耗情况调整预存储的历史落客点,将经调整的历史落客点确定为新落客点。
26.由此,实现以下技术优点:在有些情况下,乘客的步行路线终点附近可能不允许停车或者交通路况较为复杂,如果直接将落客点设置在步行路线终点附近可能会带来新的问题。通过综合考虑实时变动的各种环境因素,可以在用户的步行距离与交通安全性之间找到最佳折衷。
27.可选地,所述步骤s2包括:
28.检查步行路线终点是否位于车辆的直至目标停车位的驾驶路线上;以及
29.在步行路线终点位于所述驾驶路线上的情况下,将步行路线终点确定为新落客点。
30.由此,实现以下技术优点:在这种情况下,车辆在按照预定义的驾驶路线行驶时无论如何都会经过用户的步行路线终点,因此直接确定新落客点并不会影响车辆的整体行程规划。
31.可选地,所述步骤s2包括:
32.估计车辆从当前位置行驶到达步行路线终点时的第一时刻;
33.估计乘客从历史落客点步行到达步行路线终点时的第二时刻;以及
34.在第一时刻早于第二时刻的情况下将步行路线终点确定为新落客点。
35.由此,实现以下技术优点:通过考虑时间经济性,能够更合理地确定落客点位置。
36.可选地,所述方法还包括以下步骤:
37.向乘客发送将历史落客点变更为新落客点的请求;以及
38.在接收到乘客对所述请求的确认的情况下存储所述新落客点。
39.由此,实现以下技术优点:由此为车辆用户提供了决策自由度,以在充分考虑用户需求的情况下执行落客点调整。
40.可选地,所述步骤s3包括:
41.在乘客在新落客点下车之后,检查能否成功地将车辆从新落客点自动引导至目标停车位;以及
42.在判断出无法成功地将车辆从新落客点自动引导至目标停车位的情况下,更改目标停车位和/或向乘客发送确认更改目标停车位的请求。
43.由此,实现以下技术优点:通过使车辆功能适配于落客点变更导致的变化,能够进一步减小用户负担并避免给其他道路使用者带来困扰。
44.根据本发明的第二方面,提供一种自动代客泊车的设备,所述设备用于执行根据本发明的第一方面所述的方法,所述设备包括:
45.获取模块,其配置成能够获取乘客在历史落客点下车之后的步行路线终点,所述历史落客点位于车辆的直至目标停车位的驾驶路线上;
46.计算模块,其配置成能够基于所述步行路线终点确定新落客点;以及
47.控制模块,其配置成能够控制车辆在所述新落客点处停车以让乘客下车并从新落客点将车辆自动引导至目标停车位。
附图说明
48.下面,通过参看附图更详细地描述本发明,可以更好地理解本发明的原理、特点和优点。附图包括:
49.图1示出了根据本发明的一个示例性实施例的用于自动代客泊车的设备的框图;
50.图2示出了根据本发明的一个示例性实施例的用于自动代客泊车的方法的流程图;
51.图3示出了图2中的方法的两个方法步骤的流程图;
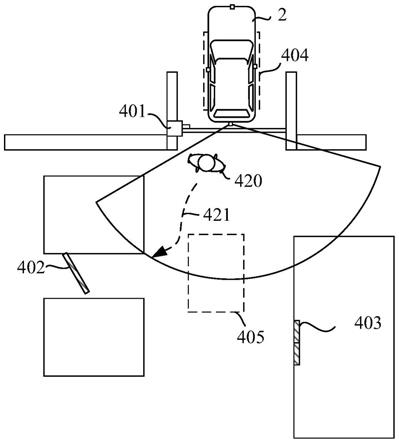
52.图4示出了在示例性应用场景中借助车载环境传感器识别潜在入口特征的示意图;以及
53.图5示出了在示例性应用场景中借助车载环境传感器探测乘客的步行方向信息的示意图。
具体实施方式
54.为了使本发明所要解决的技术问题、技术方案以及有益的技术效果更加清楚明白,以下将结合附图以及多个示例性实施例对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,而不是用于限定本发明的保护范围。
55.图1示出了根据本发明的一个示例性实施例的用于自动代客泊车的设备的框图。
56.如图1所示,车辆2包括根据本发明实施例的设备1。在此,该车辆2例如还包括由前
视摄像机11、右视摄像机12、后视摄像机13和左视摄像机14构成的全景视觉感知系统、激光雷达传感器15以及通信单元16。借助这些车载环境传感器,车辆2例如能够执行倒车辅助、障碍物探测、道路结构识别等多种功能以支持部分自主行驶或完全自主行驶。车辆2可以实现从确定位置到目标停车位的自动引导及停放。在此应注意,车载环境传感器除了包括在图1中示出的传感器还可能包括其他类型及数量的传感器,本发明对此不进行具体限制。
57.为了实现自动代客泊车过程,设备1可以包括获取模块10、计算模块20和控制模块30。
58.获取模块10用于获取乘客在历史落客点下车之后的步行路线终点。为此,获取模块10例如构造成通信接口并连接到车辆2的各个摄像机11、12、13、14,以便获取车辆周围环境的图像并基于图像识别技术分析得出步行路线终点。此外,获取模块10例如还连接到车辆2的激光雷达传感器15,从而例如能够借助点云数据对图像识别结果进行验证或补充。在此,获取模块10例如还连接到车辆2的通信单元16,这允许基于例如v2x等通信技术从智能楼宇的或用户携带的移动设备接收关于步行路线终点的位置信息。在此应注意,虽然获取模块10在图1中被示出为通信接口,然而也可能的是,获取模块10直接构造成或包括上述车载环境传感器。
59.计算模块20连接到获取模块10,以便从那里接收关于乘客的步行路线终点的信息。在计算模块20中例如能够执行相应的决策和比较,以便基于步行路线终点确定新落客点。在存储新客点之前,计算模块20例如还通过车辆的通信单元16向用户发出变更历史落客点的请求,并仅当从通信单元16接收到用户确认的情况下才将历史落客点变更为新落客点并执行存储。
60.一旦确定了新落客点,这种信息会被发送给控制模块30。当发现车辆在后续行程中接近新落客点时,控制模块30会向车辆的制动机构发送停车指令并控制车辆停车。在乘客下车后,控制模块30再继续按照预存储的导航路线控制车辆从新落客点自动行驶至目标停车位,并在那里执行泊车入位。
61.图2示出了根据本发明的一个示例性实施例的用于自动代客泊车的方法的流程图。该方法示例性地包括步骤s1-s3,并且例如可以在使用根据图1所示的设备1的情况下实施。
62.在步骤s1中,获取乘客在历史落客点下车之后的步行路线终点,该历史落客点位于车辆的直至目标停车位的驾驶路线上。在本发明的意义上,历史落客点理解为:在直至目标停车位的已经完成的驾驶行程中乘客的下车位置。在车辆完全自主行驶的情况下,车辆例如在历史落客点处短暂地停车并允许乘客下车,然后再继续接下来的行程。然而也可能的是,历史落客点被设定为与车辆的目标停车位的位置重合或相同。
63.作为示例,在乘客下车之后,可以使车载环境传感器后仍保持开启一段时间,以借助其观察乘客离开车辆之后的运动方向和轨迹,从而探测步行路线终点。
64.作为另一示例,当乘客到达特定建筑物入口并打开大门时,会自动触发建筑物的通信设备或用户自身的移动设备向车辆发送信号,以将这种入口位置信息通知给车辆。通过对接收到的信息执行分析处理,可以确定乘客的步行路线终点。
65.在步骤s2中,基于乘客的步行路线终点确定新落客点。在最简单的情况下,可以直接将乘客的步行路线终点确定为新落客点。然而还可能的是,在综合考虑天气条件、步行路
线终点附近的交通情况以及车辆能耗的情况下对历史落客点进行适当调整,并将更新后的历史落客点作为新落客点。
66.在本发明的意义上,新落客点理解为在当前的和/或将来的至目标停车位的驾驶行程中为乘客指定的新下车位置。取决于用户设置,这种新落客点可以是临时的并因此仅针对当前行程而言。也可能的是,这种新落客点被设置为永久性地覆盖并替换历史落客点。
67.接下来,在步骤s3中,控制车辆在新落客点处停车以让乘客下车并从新落客点将车辆自动引导至目标停车位。在此,如果发现车辆由于落客点变更(例如由于时间上的延误而造成原始停车位被占用、车库门已锁和/或存在意外障碍物)而不再能够被成功地被引导至目标停车位,则可以查找附近可能的替代停车位并将替代停车位的信息发送给用户。在接收到用户确认替代停车位的情况下可以执行向替代停车位的自动泊车过程。
68.图3示出了图2中的方法的两个方法步骤的流程图。在该示例性实施例中,图2中的方法步骤s2包括步骤s21-s27。
69.在此已经在步骤s1中获取了乘客的步行路线终点。
70.接下来,在步骤s21中例如首先根据步行路线终点的位置坐标判断该步行路线终点是否位于车辆的直至目标停车位的驾驶路线上。在此,该驾驶路线例如可以是历史行程中采用频率最高的导航路线,此外该驾驶路线也可能是由用户指定的驾驶路线。由此,例如可以判断出重新确定落客点是否会引起车辆的整体行程规划发生较大变化。
71.如果判断出步行路线终点位于该驾驶路线上,则表示车辆朝着目标停车位驾驶过程中,无论如何都会途径乘客的步行路线终点,因此重新规划落客点不会对车辆总体行程造成很大影响。在这种情况下,例如可以在步骤s25中向乘客发送将历史落客点变更为步行路线终点的请求,并在步骤s26中判断是否接收到用户确认。如果接收到用户确认,则可以在步骤s27中将步行路线终点确定为新落客点。反之,则在步骤s28中保留预定义的历史落客点。在此,这种请求例如可以以语音、文字、图像和/或视频的形式通过车载交互系统和/或乘客的移动终端呈现给用户。
72.如果在步骤s21中判断出步行路线终点没有位于目标驾驶路线上,则可以在步骤s22中估计车辆从当前位置行驶到达步行路线终点时的第一时刻,并在步骤s23中估计乘客从历史落客点下车步行到达步行路线终点时的第二时刻。这种时间方面的估计例如可以借助经训练的人工神经网络来完成。
73.接下来在步骤s24中,将第一时刻与第二时刻进行比较并判断第一时刻是否早于第二时刻。
74.如果在步骤s24中判断出第一时刻早于第二时刻,则表示由车辆将用户送至步行路线终点可以使用户节省步行距离和时间。因此可以在步骤s25中向乘客发送变更历史落客点的请求。
75.如果在步骤s24中判断出第一时刻晚于第二时刻,则例如表示用户的步行路线终点附近交通状况比较复杂或者可能出现拥堵,因此由车辆将乘客送至目的地虽然能在舒适性上得以提升,但在时间效率上并未优于原始方案。在这种情况下,则在步骤s28中保留历史落客点。
76.图4示出了在示例性应用场景中借助车载环境传感器识别潜在入口特征的示意图。
77.如图4所示,车辆2的历史落客点404例如被默认设置为停车场道闸抬杆401后方的固定区域404。该固定区域404例如可以是停车场的临时泊车点或者也可以是专用停车位,在那里,车辆2停车以让乘客下车,并在乘客下车之后完成后续的自动泊车过程(例如泊车入位)。
78.为了能够基于乘客下车后的运动轨迹更准确地估计出其步行路线终点,非常有利的是:已经预先掌握历史落客点附近的潜在入口特征。为此,例如在车辆2到达历史落客点404之前预先开启车辆2的车载环境传感器(例如全景视觉感知系统的摄像机)。作为示例,车辆2在到达历史落客点404之前已经至少部分自主地行驶,这表示用于环境感知的相关传感器已经处于开启状态,于是在这种情况下只需保持这些传感器继续处于工作状态即可。作为另一示例,车辆2在到达历史落客点404之前由用户手动驾驶,并且根据初始配置,仅当车辆2到达历史落客点404之后才启用车载环境传感器,于是在这种情况下需要在车辆2到达历史落客点404之前的几分钟内或几十米处预先开启车载环境传感器并存储这段时间内探测到的环境数据。在此,提前开启传感器的时间段或距离可以由用户自定义或由系统给定。
79.在图4所示实施例中,在车辆2到达固定区域404之前借助车载摄像头拍摄周围环境的图像和/或视频,在此还示例性地示出了车载摄像头的视野范围110。基于适当的图像识别技术,可以从所拍摄的图像和/或视频中辨识出车辆2在到达历史落客点404之前经过的一个或多个潜在入口特征402、403。在本发明的意义上,潜在入口特征402、403理解为乘客在进入相应建筑物或场地之前必经的关卡性质特征,这例如包括建筑物入口、楼梯、无障碍坡道等。相比于其他道路结构,这些位置更有可能成为或接近用户的最终步行目的地,因此通过预先掌握这类结构特征,可以极大地缩小步行路线终点的搜索范围并提高乘客运动估计的准确性。
80.图5示出了在示例性应用场景中借助车载环境传感器探测乘客的步行方向信息的示意图。
81.如图5所示,车辆2已经到达历史落客点404并停车,乘客420从那里下车并步行前往最终目的地。为了能够在乘客420下车后继续监测其运动趋势并由此估计步行路线终点,需要在车辆2到达历史落客点404之后的预定义时间段内继续保持车载环境传感器开启。取决于所需的运动估计准确性以及车辆能耗,这种继续开启的时间段例如可以被设置为1-3分钟。
82.在图5所示场景中,例如借助车辆2的后视摄像头多次观察到:乘客420在离开车辆2之后穿越停车场道闸抬杆401并沿着运动轨迹421前进。最终,由于建筑物的遮挡或车载环境传感器的视距限制,乘客420消失在后视摄像头的视野中。基于目前的探测结果,例如能够推断出乘客420的大致步行方向421,但尚不能完全确定其最终的步行路线终点。
83.结合图4和图5来看,例如了解到:沿着乘客420的步行方向421存在预先识别出的院落门禁402。于是,乘客420极有可能穿越该院落门禁402并进入了相关建筑物内部。基于这种假设,可以从已知的潜在入口特征402、403中选择出院落门禁402并将其作为乘客420的步行路线终点。随后,可以基于该步行路线终点为车辆2确定新落客点405。
84.在此应注意的是,虽然在图4和图5所示实施例中通过车载环境传感器掌握附近的潜在入口特征402、403,然而也可能的是,从车辆2搭载的数字地图中获取历史落客点404附
近的其他潜在入口特征。
85.尽管这里详细描述了本发明的特定实施方式,但它们仅仅是为了解释的目的而给出的,而不应认为它们对本发明的范围构成限制。在不脱离本发明精神和范围的前提下,各种替换、变更和改造可被构想出来。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1